
Abstract
With the rapid development of the aging society, many of the elderly people are in need of nursing care for their daily activities. Therefore, innovative technologies are needed to support the daily activities of elderly people and to lighten the heavy burden of nursing. We think the technology of soft actuators should be one of the key issues for developing such technologies. In this study, we focused on walking assistance for daily life and presented a preliminary work of developing novel poly vinyl chloride (PVC) gel actuator-based lightweight and soft wearable assistive spats for supporting the walking motion of human. The PVC gel devices are incorporated in the generally used spats. The stiffness of the gel spats can be actively varied with the applied DC field turned on and off. The gel spats have the characteristics of a simple structure, a lightweight, easy to put on and take off, and with a high flexibility. A prototype was tested in the motions of lifting a foot and walking. It was found that the integrated electromyogram (IEMG) and maximal voluntary contraction (%MVC) values of the rectus femoris muscle reduced with the assistance of the gel spats, which demonstrated the potential of the gel spats as a device for walking assistance.
Keywords
1. Introduction
The rapid aging of global population has brought a situation in which more and more elderly people need to be cared for by the other elderly family members or professional caretakers. In some cases, the caretakers become physically exhausted and stressed out due to the heavy burden when helping these elderly people.
Walking assistance, as one important issue for elders or people with impaired mobility, has received serious attention in the field of robotics and mechatronics in the recent decades. Many devices have been invented for walking assistance or supporting heavy loads. The vast majority of these are rigid exoskeletons, using electric motors with links in parallel with the body that can impart torques to the joints and support compressive forces. The robot suit hybrid assistive limb (
However, for a widespread use, exoskeletons still have some challenges such as large interaction loads that occur due to misalignments between human limbs and exoskeleton [7], and the exoskeletons may require bulky self-aligning mechanisms [7, 8].
Since the wearable assistive devices interact with human body directly, in addition to enhance human performance, the devices should have low impedance, high flexibility, and be comfortable and safe to wear. So far, few numbers of such assistive devices have been developed. Pneumatic artificial muscle actuators [9] are soft and lightweight and are widely used not only in factory floor automation but also in robotics as a main motion power source in recently years. Michael Wehner et al. proposed a lightweight soft exosuit for gait assistance using soft McKibben-style pneumatic actuators [10], which showed the potential to reduce the wearer's metabolic cost during walking. In addition, some other pneumatic muscle-type actuator-based assistive rehabilitation robotics systems, with different designs and control schemes are reported in Ref. [11]. Nevertheless, the pneumatic muscle-based system seems to have challenges on the volume change of actuators with the on and off actuations which may make the device bulky, and the pneumatic power supply system could become a problem and be noisy. To overcome these problems, Asbeck et al. proposed a soft clothing-like “exosuit'” which was actuated by geared motors driving Bowden cables [12]. A key feature of the proposed exosuit is that when wearing the exosuit, it feels like wearing a pair of pants and does not restrict the wearer whatsoever. Besides, a shape memory alloy (SMA), as a replacement for conventional actuators such as electric motors, pneumatics and hydraulics due to their unique characteristics and ability to react directly to environmental stimuli, has many applications in biomedicine and robotics [13]. Leia Stirling et al. presented a primary work on the development of an active, soft orthotic for the knee using NiTi shape memory alloy wires [14]. They found that the SMA spring actuators made possible a full range of knee motion but with a slow response and high power consumption. Other polymer material-based functional clothes are also being studied for walking assistance, such as the functional spats proposed by Akio Shizukai et al. [15] and the conditioning wear CW-X [16]. These types of assist wears can only support motion passively and may not provide individualized control so as to assist the muscles more appropriately, which might result in the limitation of applications.
Our previous research mainly focused on developing a soft actuator that can meet the requirements of such applications in bio-mechatronics. Hirai et al. found the bending deformation of the PVC gel under an electric field [17]. We developed a contraction–expansion-type gel actuator using the PVC gel, a stainless steel-meshed anode, and a foil cathode based on the deformation of the PVC gel [18, 19]. The PVC gel actuators have the advantages of stable movement in the air with a strain of 10%, a response rate of 7 Hz and a variable stiffness which is quite similar with the characteristics of the biological muscles [20]. We found that the stiffness of the actuator significantly increased when the applied DC field increased. The characteristics of the PVC gel actuators are shown to be effective for constructing an artificial muscle for various applications.
In this preliminary work, we examined the feasibility of using PVC gel actuators to develop an active, soft, and lightweight assistive gel spats for walking assistance. We incorporated PVC gel actuators within general spats to make new variable stiffness spats for walking assistance. The stiffness of the spats varies with on and off switching of an electric field at some certain gait of walking. The design mimics kinesiology-taping techniques that the gel spats can not only apply joint torques via tensile forces over the outside of the body but also feasibly give a stimuli to facilitate the circulation of muscles (e.g., the rectus femoris muscle) by a variable compressive pressure, so as to improve the biomechanics of lower limbs during motion, as shown in Figure 1. Compared to traditional exoskeletons, the proposed gel spats provide minimal additional mechanical impedance and kinematic restrictions. A prototype (see Figure 1 (c)) was fabricated, and its performance was evaluated in a pilot study to examine the effectiveness of walking assistance in our recent paper [21]. In this chapter, an extension of our previous work is addressed in detail.
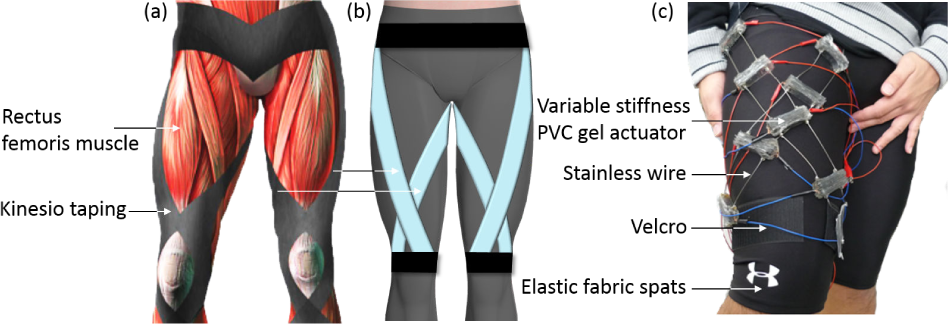
Design and prototype of variable stiffness gel spats, (a) upper leg muscle anatomy with taping, (b) design concept, and (c) actual prototype
The rest of the chapter is organized as follows: Section 2 introduces the structure and characterization of variable stiffness PVC gel actuators. Section 3 describes the design and fabrication of the prototype. Section 4 presents the evaluation experiment and results. Finally, we conclude the chapter with some discussions on future work in Section 5.
2. PVC gel actuators
2.1 Composition and electric response of PVC gels
The PVC gel is composed of commonly commoditized PVC powder (degree of polymerization is 3200) and a plasticizer of dibutyl adipate (DBA). The PVC gel can be easily prepared in laboratories by the process shown in Figure 2. That is, PVC powder is dissolved in a mixture of DBA and tetrahydrofuran (THF). Then the mixture is cast in a Petri dish, and the THF evaporates at a constant temperature of 20 °C for about three to five days to form the PVC gel membrane. Generally, using this method, we can obtain a film that has a thickness of several hundreds of micrometers to several millimeters.
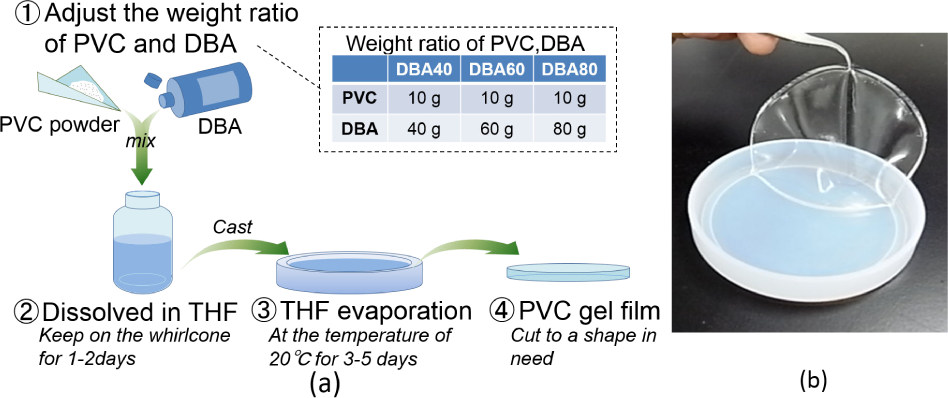
Preparation of PVC gel, (a) process of fabrication and (b) an actual PVC gel membrane
The fabricated PVC gel membrane is soft, lightweight, and generally can be deformed to 300% by stretching. The properties of the PVC gel membrane change due to the adjustment of weight ratio of PVC and DBA. In this study, the weight ratios of PVC and DBA were adjusted to 10:40, 10:60, and 10:80, and the gels were denoted as DBA40 (10:40), DBA60 (10:60), and DBA80 (10:80), respectively.
PVC gel is one type of electroactive polymer (EAP), which exhibits large strain in response to electrical stimuli. When both the sides of the PVC gel membrane are sandwiched by electrodes (see Figure 3), a creep-like deformation occurs at the anode side of electrodes when an electric field is turned on. When the electric field is turned off, the membrane quickly returns to its original shape due to its elasticity. Since an accumulation of negative charges on the gel surface near the anode was confirmed by a space-charge measurement [22], we believe that when an electric field is present, electrons are injected from the cathode into the gel and migrate toward the anode. Then, Maxwell force causes the gel to deform asymmetrically, resulting in creep deformation along the anode.

Illustration of deformation of PVC gel stimulated by an electric field
2.2 Structure of PVC gel actuators
Focusing on the unique phenomenon and mechanism of PVC gels at the side of anode electrode, we proposed the structure of a contraction and expansion-type PVC gel actuator using a meshed-type electrode. The PVC gel is sandwiched between a stainless steel mesh as an anode and a foil cathode (see Figure 4 (a), (b)). When a DC field is applied, the PVC gel creeps up the anode and moves into the holes in the mesh. As a result, the actuator shrinks in the thickness direction. When the DC field is removed, the elasticity of the gel causes it to rapidly return to its original shape. Thus it performs the contraction and expansion deformation that is similar to a human muscle. By stacking up the layers, it can be operated as a multilayered contraction and expansion type actuator, providing a larger displacement (see Figure 4 (c)).

Structure and mechanism of PVC gel actuators, (a) mechanism, (b) experimental result, and (c) multilayered structure
2.3 Stiffness variation of PVC gel actuators
In this study, as the first step to apply the PVC gel actuators to human motion assistance, we focused on the characteristic of stiffness variation of the PVC gel actuator other than the contraction–expansion movement of an actuator itself. This allowed us to achieve the design requirements such as a minimal weight and size, no rigid frame structures, and a simple structure of device to integrate with spats easily. It would need numerous stacked layers to obtain an adequate displacement to assist body motion if we use the contraction–expansion movement of PVC gel actuators, consequently leading to a bulky structure. In contrast, when using the stiffness variation to assist the motion, a large displacement was possibly produced by the variation of stiffness. Therefore, we utilized the stiffness variation to support the motion of walking in this study. In order to achieve the optimal design of the gel spats, we investigated the stiffness variation of PVC gel actuators in different conditions, such as different electric fields, weight ratios of PVC and DBA, PVC gel thickness, and electrode types.
2.3.1 Mechanism of stiffness variation
As shown in Figure 4, the PVC gel is sandwiched between the mesh anode and the foil cathode. The total stiffness of the actuator changes dramatically with an applied DC field turned on and off. This is due to the contact status between the PVC gel and the anode mesh electrode that changes noticeably with and without the DC field.
When a DC field is applied, the PVC gel creeps on the anode and moves into the mesh holes. With the contact area between the gel and anode changing from a point contact to a surface contact, the adsorption force due to the Maxwell force between them increases, resulting in an increase in the whole stiffness of the PVC gel actuator. When the DC field is turned off, the PVC gel returns to its original shape, consequently changing the contact area between the gel and anode from a surface contact to a point contact so that the whole stiffness of the actuator decreases. With the same mesh electrode, a higher DC field produces larger Maxwell force and larger deformation of PVC gel which result in a bigger stiffness variation. With the same deformation of the actuator, a bigger stiffness variation will generate a larger output force.
2.3.2 Measurement of stiffness variation
We measured the stiffness variation of PVC gel actuators as shown in Figure 5. The top of the PVC gel was connected to a load cell (LTS-1KA-10N, Kyowa, JAPAN) and the bottom was fixed to a z-stage. We deformed the PVC gel actuator by actively modifying the micrometer of the z-stage (as a displacement of ΔL) and measured the stress using the load cell to obtain the relation between the tensile stress and extensional strain of the actuator.

Measurement of the stiffness of PVC gel actuators
The stiffness of the PVC gel is defined as G and the tensile stress and extensional strain of the PVC gel actuator are σ and ɛ, respectively. Based on Hooke's law, we can obtain the relation between the stress and strain in Eq. (1). The stiffness of PVC gel actuator can be calculated by dividing the tensile stress by the extensional strain in the elastic (initial, linear) portion of the stress–strain curve (see Eq. (2)).



As shown in Figure 5, the multilayered PVC gel actuator is just directly stacked up by single-layer structures without any other mechanical treatment. As long as a micro nonuniform structure of mesh anodes or PVC gels occurs, the multilayered actuator could be separated from one layer to the other when being pulled by a certain force under the electric field. In this study, we use the tensile stiffness variation of PVC gel actuators for motion assistance. Therefore, to successfully measure and utilize the tensile stiffness of PVC gel actuators, we have to consider the break among the stacked layers, especially when no electric field exists. To solve this, we reinforced the actuator by PVC gel solution coating both sides of the actuator in the length direction.
We measured the relationship between the tensile stress and strain of three five-layer PVC gel actuators with an applied DC field of 1200 V/mm. The PVC gel membrane was 0.5 mm thick and 10 mm × 50 mm in size, with a weight ratio of DBA40. The stainless mesh size of the anode was #20 (means 20 wires to an inch) and was 0.8 mm thick. When the DC field was applied, the PVC gel actuator contracted, and we set the load of the load cell to zero. We then adjusted the micrometer of the z-stage to actively deform the actuator. Figure 6 shows the results of the relationship between the stress and strain of the PVC gel actuator. From the results, we can see that the stress is almost linearly proportional to the strain. Then, the stiffness of the actuator can be obtained by calculating the slope of the stress–strain curve.

Relationship between tensile stress and strain of PVC gel actuators
2.3.3 Results of stiffness variation
The stiffness can be affected by several parameters, including the weight ratio of the PVC and plasticizer DBA, the thickness of the PVC gel, and the size of the mesh anode. We conducted experiments to investigate the relationship between the stiffness and these parameters of five-layer PVC gel actuators. We investigated the stiffness versus the weight ratios of the PVC and DBA of 10:40, 10:60, and 10:80; thicknesses of PVC gel of 0.5 mm, 1.0 mm, and 1.5 mm; and mesh sizes of 20, 40, and 60. Other conditions of the actuators are shown in Table 1.
Conditions of the PVC gel actuators
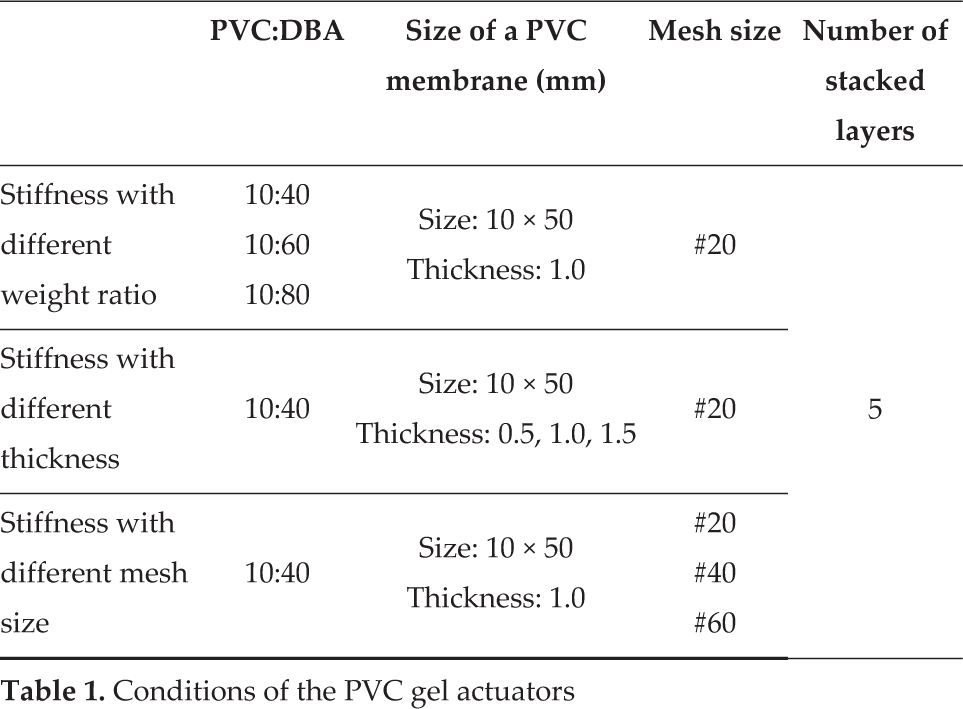
Figure 7 (a) shows the results of the PVC gel actuator stiffness versus different weight ratios of PVC and DBA. It indicates that the stiffness of PVC gel actuator increases with the decrease in DBA. This is because when the weight ratio of the plasticizer DBA in the PVC gel increases, the gel becomes softer. Figure 7 (b) shows the stiffness versus different gel thicknesses, which shows a tendency that the thinner PVC gel has the higher stiffness at the same DC field. This indicates that the thicker PVC gel membrane needs a higher DC voltage to obtain the same strain as the thinner ones. Figure 7 (c) shows the results of stiffness with different mesh sizes of anode electrode. We can see that under a lower DC field, the stiffness increases with an increase in mesh size, and it increases with a decrease in mesh size under a higher DC field. This can be attributed to a larger deformation of PVC gel membranes under a lower DC field when using a bigger mesh size and a larger deformation under a higher DC field when using a smaller mesh size.

Results of stiffness variation of the PVC gel actuator, (a) with different weight ratios, (b) with different thickness, and (c) with different mesh size
Based on the results mentioned, the PVC gel actuator with a weight ratio of DBA40, a gel thickness of 0.5 mm and an anode stainless mesh size of 20 had the greatest stiffness. Therefore, in this study, we used the PVC gel actuator with a weight ratio of DBA40, PVC gel thickness of 0.5 mm and stainless mesh size of 20 in the design of variable stiffness gel spats prototype for walking assistance.
3. Design and fabrication of variable stiffness gel spats
3.1 Proposal of variable stiffness gel spats
Our main goal is to design a wearable, lightweight and soft assistive gel spats for daily use. The function of the spats should be defined as “power assist” rather than “power augment.” The basic design concept was to create an external artificial muscle taping structure by mimicking the kinesiology-taping techniques that the trainers apply to injured muscles, as described in Figure 1. When this technology is applied to muscles and joints, it creates an exoskeletal support system that improves biomechanics during motion [23, 24]. This allows the gel spats to not only apply joint torques via tensile forces over the outside of the body but also feasibly give stimuli to facilitate the circulation of some key areas (e.g., the rectus femoris muscle) by a variable compressive pressure, to make muscles work more efficiently.
In this study, the arrangement of the PVC gel actuators is shown in Figure 8. Two variable stiffness PVC gel actuator parts are arranged decussately on the thigh, in which the intersection point is just over the rectus femoris muscle. Each PVC gel actuator is connected by high-stiffness stainless wires to generate force in the PVC gel actuator part with no losses during walking assistance. Both sides of the PVC gel actuator parts are fastened at the waist and knee by velcro, which enables adjusting the length of the actuator for an individual and avoids breaking during removal. The design is mainly concerned with two parts: spats and variable stiffness PVC gel actuators.

Concept and structure of the designed variable stiffness gel spats, (a) design concept and (b) structure
3.2 Walking assistance with gel spats
The method of walking assistance with the variable stiffness gel spats is shown in Figure 9. First, the variable stiffness PVC gel actuators are stretched with a high strain and fastened on the spats without a DC field. Because the stiffness of PVC gel actuators is very low without a DC field, the tension of the gel spats is low. Then, when the DC field is applied, the stiffness of the gel parts changes and provides a parallel force and a vertical force to the thigh to assist the motion of the hip joint while walking. That is, when the user begins to raise a foot to take a step, the DC field is applied to the PVC gel actuators to increase the stiffness of the thigh part of the spats, and the tension of the gel spats increases dramatically, adding additional force to the thigh to assist raising the foot. Meanwhile, a compressive force occurs at the thigh that gives stimulation to the muscles. Finally, during the footsteps to the ground, the electric field is turned off to decrease the stiffness of the PVC gel actuators, and the tension of the gel spats decreases dramatically, making it easy to walk. In this manner, we believe that the variable stiffness gel spats are able to lighten the load of the human muscles during walking.

Walking assistance method using variable stiffness gel spats
3.3 Spats selection
In this study, we chose short-type elastic fabric spats without covering the knee for fabricating the assistive gel spats. When utilizing the variation of tensile stiffness of PVC gel actuator for walking motion assistance, we needed spats with the properties of extension in the stance phase and contraction in the swing phase. We found that spats which are long enough to cover the knee will extend even in the swing phase which is not suitable for this study. In this manner, as shown in Figure 9, when the foot raises to make a step, activating the electric field, the gel spats contract with the PVC gel actuators, generating a force with a variation in the stiffness to assist walking. During the swing phase to the stance phase, the electric field is turned off, and the gel spats extend with a low stiffness, leading to an easy downward motion of the leg. The material for the spats commonly used is a high elastic fabric, with 75 % polyester and 25 % polyurethane.
To design the PVC gel actuator part for the variable stiffness gel spats, it is necessary to investigate the deformation of normal spats during walking. As shown in Figure 10, five markers for motion capture are arranged equally at the top, middle, and lower part of the thigh, arranged in the same shape as PVC gel actuators. The three-dimensional position is captured by a motion capture device (Vicon Nexus Inter-Reha Co., Ltd). We calculated the distance between each marker during walking from the stance phase to the swing phase and from the swing phase to the stance phase. We found that the spats shrunk from the stance phase to the swing phase and extended from the swing phase to the stance phase in reverse order, which is consistent with the design requirement of spats. And we got a maximum deformation of 5.12 mm between the top marker (near hip joint) and the bottom marker (near knee joint). The design of the strain of PVC gel actuators during walking should accord with this result.

Arrangement of markers for motion capture
3.4 Design and fabrication of PVC gel actuators for gel spats
As discussed in Section 2, the multilayered PVC gel actuator is directly stacked up by single-layered structures with a coating treatment at both sides of the actuator. Therefore, in order to obtain a robust performance of the gel spats, the break among the stacked layers should be taken into account in the design of PVC gel actuators' part. We measured the maximum strain until a break occurred among the stacked layers of the PVC gel actuator. We found that the PVC gel actuator separated and broke when the strain reached 0 08. So the maximum strain for the design of the PVC gel actuator was about 0 07. To obtain a maximum generation force, the maximum strain of PVC gel actuators should be equal to the maximum strain of spats during walking. That is, the deformation of PVC gel actuators is the same as the maximum deformation of spats which is 5.12 mm.
Considering the deformation of the spats during walking, we calculated the number of stacked layers of the PVC gel actuators that were needed, using the following equations:


where δ = 5.12 mm is the maximum deformation of the spats, T is the total height of the PVC gel actuator α is the height of each single-layer unit of the PVC gel actuator which is about 1.2 mm and x is the number of the stacked layers in the PVC gel actuator. According to Eqs. (4) and (5), x is about 60. In this study, we divided the 60-layer gel actuator into four parts, with 15 layers in each part. As for the other dimensions of the PVC gel actuators, considering the average size of thigh circumference of the elders, we define the length of each actuator as 50 mm. To obtain a clothing-like spats, we should design the width of each actuator as smaller as possible. For the prototype, we define the width of each actuator as 10 mm. Therefore, the size of a 15-layer actuator unit is 50 mm in length, 10 mm in width, and 18 mm in height.
As a pilot study for investigating the feasibility of PVC gel actuator used for walking assistance, we fabricated variable stiffness gel spats just for one leg in this study. Figure 11 shows the fabricated prototype gel spats. The entire prototype, including eight actuators, electronics, and elastic fabric spats but excluding the mass of the power source, weighs approximately 300 g.

Fabricated variable stiffness gel spats, (a) part of variable stiffness PVC gel actuator and (b) fabricated prototype
3.5 Estimation of generation forces of gel spats
We calculated the generation force of the gel spats as, shown in Figure 12. We define the variation in stiffness as G, the strain in the spats during walking as ɛ the cross-sectional area for each PVC gel actuator as A and the generation force from the variable stiffness as f and F for each actuator and gel spats, respectively. The angle between one PVC gel actuator part and the thigh is θ The generation force for each actuator can be calculated by Eq. (6). According to Hooke's law, the generating force of gel spats can be obtained by Eq. (7).

Generation force calculation for gel spats


Figure 13 shows the result of stiffness variation of the fabricated 15-layer PVC gel actuators. The stiffness changes noticeably from 20 kPa at 0 V/mm to 240 kPa at 1200 V/mm. In this study, considering the safety of the wearer, we chose the applied DC field of 600 V/mm (voltage of 300 V) to operate the gel spats.

Stiffness variation of 15-layer PVC gel
The variation of stiffness G = 85 kPa when the DC field changes from 0 V/mm to 600 V/mm, the maximum strain ɛ = 0.07, the cross-sectional area A = 5.0×10−4 m2 and the angle θ = 20° Therefore f for each PVC gel actuator is 3 N, and the total generating force F is 5.64 N. Since the stiffness G = 20 kPa when the DC field is 0 V/mm, the initial force of the gel spats is about 1.33 N. We believe that the initial force would not be a burden to the wearers.
4. Experimental
4.1 Methods and conditions
In this study, we conducted two basic experiments to evaluate the effectiveness of the variable stiffness of gel spats. The method, measurement system, and overview of the experiment are shown in Figure 14.

Method of the experiment for assistance effect, (a) illustration of method, (b) measurement devices, and (c) overview of experiment
In the first experiment, we endeavored to find the assistance effect for the motion of lifting a foot. Five healthy male university students, with an average age of 20 years, were asked to participate in the experiment. The subjects wore the gel spats with the PVC gel actuator part arranged only on the right part of the spats. The subjects raised their right foot from the standing position at the sound of a metronome. On hearing another sound, the subjects dropped the right foot to the standing position. The DC field (300 V) for the PVC gel actuator part was turned on and off by the moment the subjects raised or lowered their feet. Two computers were used to apply power to the gel spats and to measure the electromyogram (EMG), respectively. A wireless EMG logger (LP-MS1002, Osaka Electronic Equipment Ltd.) was used to measure the EMG of the subjects' rectus femoris muscles when wearing normal spats and gel spats.
In the second experiment, we investigated the assistance effect while walking. We asked the five healthy male university students to participate in the experiment. The subjects were asked to walk at a pace governed by the sound of the metronome. The DC field (300 V) was turned on and off at the moment of lifting and laying down the right foot to change the stiffness of the gel spats to assist walking. The electromyogram of the subjects' rectus femoris muscles and biceps femoris muscles was measured when wearing normal spats and gel spats.
4.2 Experimental results
Figure 15 shows the results of the first experiment. Figure 15 (a) shows the integrated electromyogram of the rectus femoris muscle. The x-axis is the normalization of the motion time. We define the stance phase of the right foot as 0, the swing phase as 1 and when the right foot returns to the stance phase as 2. From the results, we can learn that when lifting the foot, the rectus femoris muscle is used to support the motion with an increase in the IEMG value. In the period from 0 to 1, the DC field is turned on, and we can see that with the assistance of the gel spats that the IEMG is lower when wearing normal spats. In the period from 1 to 2, the DC field is turned off and the value of IEMG is almost the same both when wearing normal spats and gel spats. In addition, the average maximal voluntary contraction when wearing gel spats is 6.2 % lower compared with that of normal spats with a significant difference of 5 % (see Figure 15 (b)). This suggests that wearing the variable stiffness gel spats reduces the load on the rectus femoris muscle when lifting a foot.

IEMG and %MVC of the rectus femoris muscle in the first experiment, (a) IEMG and (b) %MVC
We obtained similar results in the second experiment as shown in Figure 16. In the period from 0 to 1, with the assistance of the gel spats, the IEMG of the rectus femoris muscle was lower compared with that of normal spats. In the period from 1 to 2, the DC field was turned off, and the value of IEMG was almost the same as that for normal spats. In addition, the average %MVC when wearing gel spats was 5.4 % lower than when wearing normal spats with a significant difference of 5 %. However, we did not obtain a significant difference in the IEMG of the biceps femoris muscle in the two cases for this experiment (see Figure 17). This indicates that wearing the variable stiffness gel spats reduces the load on the rectus femoris muscle during walking.

IEMG and %MVC of the rectus femoris muscle in the second experiment, (a) IEMG and (b) %MVC

IEMG and %MVC of the biceps femoris muscle in the second experiment, (a) IEMG and (b) %MVC
5. Discussions and future work
This chapter presented a fundamental research to verify the feasibility of using PVC gel actuators to develop an active, soft, and lightweight assistive gel spats for walking assistance. Compared to other prior wearable assistive devices, the proposed gel spats had the features of no rigid mechanical structures, had a minimal weight, and high flexibility which made the assistive device possibly be wearable like clothing.
We also discovered several challenges of using the variable stiffness of PVC gel actuators for implementing an assistive device. We found that even though we got a simple structure of the device, the generation force was small as a break could occur among the stacked layers. Besides, the applied high DC voltage should be taken into account for the safety which brought along a reduction of generation force for assistance.
The evaluation of experimental results showed a little reduction of the activity of the rectus femoris muscle which indicated that the gel spats could be used for walking assistance for certain motions of gait. Since the design mimicked kinesiology-taping techniques, we thought that the result of muscle activity reduction was obtained not only by the applied joint torques via tensile forces over the outside of the body but also by a variable compressive pressure to provide a stimulation to facilitate the circulation of muscles. This might indicate the potential to utilize a smaller force to achieve a greater performance for the design of wearable robotic devices in the future.
In this chapter, the prototype was tested for motion assistance, which had importance in walking assistance as a first step. However, the design of a controller for the gait cycle detection is beyond the scope of our current work. The current device provides future opportunities for complex control strategies that can detect the precise gait of wearers in a natural walk. This would require some technologies of sensing, for example, using the pressure or angle sensors.
Finally, future work will focus on various aspects. For the controller design, we plan to design a control scheme to the system using some compact and smart sensors, for example, using the FlexiForce® pressure sensors to precisely detect the gait cycles and to design some strategies to control the applied DC field more efficiently not just switch on and off at a certain voltage. For design improvement, we will conduct research to improve the properties of the PVC gel actuators, such as improving the composition of PVC gel membranes and the structure of electrodes to achieve a lower input voltage with high performance. Also, we will take further effort to guarantee the safety of the wearers, such as to decrease the applied voltage and to reinforce the insulation. We will try to design a new structure that would allow us to solve several potential problems of the current prototype, such as mechanical robustness to the external force, generation force, and durability. This would provide the capability of developing a more powerful and robust wearable device for practical use in walking assistance.
6. Conclusions
Variable stiffness PVC gel actuator-based lightweight, soft wearable gel spats for walking assistance were designed, and a prototype was fabricated. The effectiveness of the prototype was investigated in a pilot study, obtaining about 6% reduction in the activity of the rectus femoris muscle, which demonstrated the capability of the PVC gel actuators for assisting lower limb motions during walking using the stiffness variation. We believe that this soft actuator-based design concept and structure will give a big inspiration for future wearable robot and soft actuator technologies for human motion assistance and rehabilitation.
Footnotes
7. Acknowledgements
This article is a revised and expanded version of a paper entitled “Development of Variable Stiffness Gel Spats for Walking Assistance” presented at IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, November 3–8, 2013.
This research has been supported by JSPS KAKENHI Grant Number 23656182.