
Abstract
In this study, we propose an effective design method for the phalangeal parameters and the total size of humanoid robot fingers based on a biomimetic optimization. For the optimization, an interphalangeal joint coordination parameter and the length constraints inherent in human fingers are considered from a biomimetic perspective. A reasonable grasp formulation is also taken into account from the viewpoint of power grasping, where the grasp space of a humanoid robot finger is importantly considered to determine the phalangeal length parameters. The usefulness of the devised biomimetic optimization method is shown through the design examples of various humanoid robot fingers. In fact, the optimization-based finger design method enables us to determine effectively the proper phalangeal size of humanoid robot fingers for human-like object handling tasks. In addition, we discuss its contribution to the structural configuration and coordinated motion of a humanoid robot finger, and address its practical availability in terms of effective finger design.
Keywords
Introduction
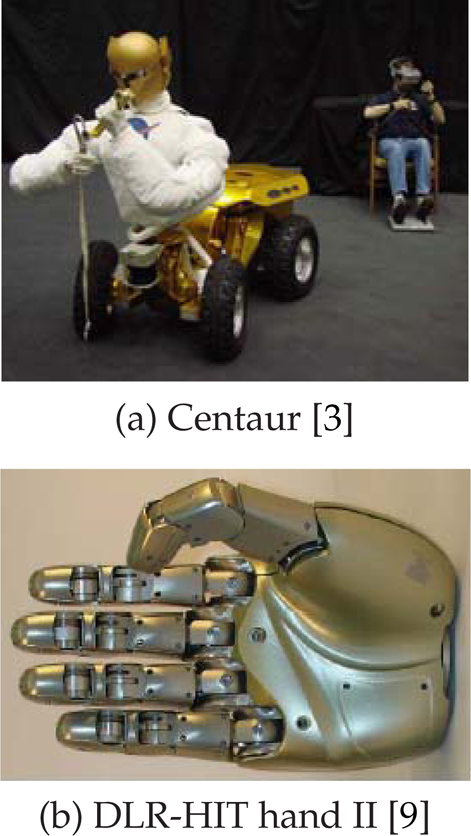
It is well-known that a dexterous multi-fingered robot hand is essential for humanoid robots to perform various object handling tasks in many areas, such as dangerous and precise industries, hospitals and the home [1–4]. In fact, the mechanical capability of a hand strongly influences the work performance of humanoid robots. As such, many researchers have tried to develop a dexterous robot hand [5–10]. Fig. 1 shows some examples of advanced humanoid robotic hands. Effective manipulation skills are also important for hand mechanisms. Accordingly, it is very interesting to consider useful skills of human hands for such dexterous robotic applications and prosthetic tasks in terms of biomimetics [11–13]. In this sense, it is especially valuable to utilize the joint motion behaviours of human fingers for effective human-like motions [14, 15].
In practice, the dexterity of robotic hands can be achieved by the operating capability of each finger for object grasping and manipulation. The link mechanism of the finger is very important for the required dexterity of robotic hands. Thus, it is of value to mimic the structural feature of human fingers for effective robotic finger design. The coordinated motion planning of multiple fingers is also important. In relation to designing such a finger, we focus especially on how to determine the link length of a robotic finger [3, 9]. For this, we pay attention to the feature of human fingers in the biomimetic perspective. The joint relationship in a human finger characterized in the biomechanical research [16, 17, 14] is actually remarkable in designing a dexterous humanoid robotic finger. A simplified joint combination has been employed for the simple motion planning of a prosthetic finger [18]. We also attempted to use the feasible interphalangeal joint coordination of human fingers while grasping [15, 19], and we analysed the coordinated motions of humanoid robot fingers for reasonable grasping tasks [20]. Even though many robotic hands have been developed, it is not obvious how to determine systematically the phalangeal length parameters of a finger for humanoid robot hands. This is because the effective size of a humanoid finger may vary according to applications. As such, we need to devise a method to determine systematically the phalangeal length parameters of a finger considering the total size.
Hands for humanoid robots
The objective of this study is to provide a biomimetic optimization method for us to determine effectively the phalangeal length parameters of a humanoid robot finger. The important point of this paper is to observe and utilize the features of human fingers for this purpose.
The paper is organized as follows. In Section 2, the important points relating the optimization strategy such as an interphalangeal joint coordination, triangular grasp formulation and the length constraints of human fingers are described. Based on these concepts, we reveal a biomimetic optimization method for the effective sizing of humanoid robot fingers. In Section 3, we provide some design examples of humanoid robot fingers by using the proposed biomimetic optimization method. In Section 4, the usefulness of the optimization-based finger design method is shown through exemplary demonstrations. We also discuss its contribution to the structural configuration and coordinated motion of a humanoid robot finger and its practical availability. Concluding remarks are finally made in Section 5.
For a hand design project, it is a fundamental step to assign the phalangeal parameters of a finger. Many researchers seem to properly set the phalangeal parameters by considering the finger's mechanical deriving mechanism [9, 21]. It would probably not be easy to set the parameters systematically.
In this section, we present an effective biomimetic optimization method to determine the phalangeal length parameters of a finger for humanoid robots and prosthetic applications. To do this, we consider the structural feature of a human finger as shown in Fig. 2(a). Such a human hand usually has a thumb and four fingers, with five metacarpals and fourteen phalanges [22, 23]. Each finger except for the thumb consists of one metacarpal and three phalanges, namely the proximal, middle and distal phalanxes. The length of these phalanges becomes progressively smaller from the proximal phalanx to the distal phalanx. The metacarpophalangeal (MCP) joint plays an important role as the base pivot for each finger actuation. Such a finger has two interphalangeal joints, the proximal interphalangeal (PIP) and distal interphalangeal (DIP). As such, the human fingers except for the thumb can be modelled as a three-jointed robotic finger in planar space, as shown in Fig. 2(b), for humanoid robot hands.

Skeletal configuration of a human finger and its model
In practice, in order to develop such a humanoid robot finger as shown in Fig. 2(b), the total size and the appropriate length of each phalanx of the desired finger should be determined by considering its role. To be specific, for the design of the i th robot finger in Fig. 3, it is necessary to determine the length parameters of the proximal (l1i), middle (l2i) and distal (l3i) phalanges, respectively. The total size of the i th robot finger L i is basically decided by

Since there are many combinations if we take each length parameter arbitrarily, it is necessary to adopt a proper constraint for the effective determination of the length parameters. In this sense, we try to devise a biomimetic optimization method considering the following constraints based on the kinematic features of the i th human finger:


Grasping postures of the ith humanoid robot finger
We also consider the following proximal phalangeal relations because they are normally satisfied in human fingers:

In this way, for a human-like motion, it is fascinating to employ the inherent interphalangeal joint coordination (IJC) of a human finger from the biomimetic viewpoint [20]

where Λ i is called as the IJC parameter between the PIP (θ2i) and DIP (θ3i) joints of the i th human finger in Fig. 2(b). In the previous research [20], we addressed how to find the IJC parameter of a humanoid robot finger based on its motion ranges (θ2i,max, θ3i,max). In this paper, however, we focus on applying a desired IJC parameter for the purpose of the effective sizing of a humanoid robot finger in the design aspect. In fact, the motion of the DIP joint is dependent on the actuation of the PIP joint in human fingers [14, 17], and thus, by considering the relationship in (5), it is possible to develop a humanoid robot finger mimicking human-like finger motion.
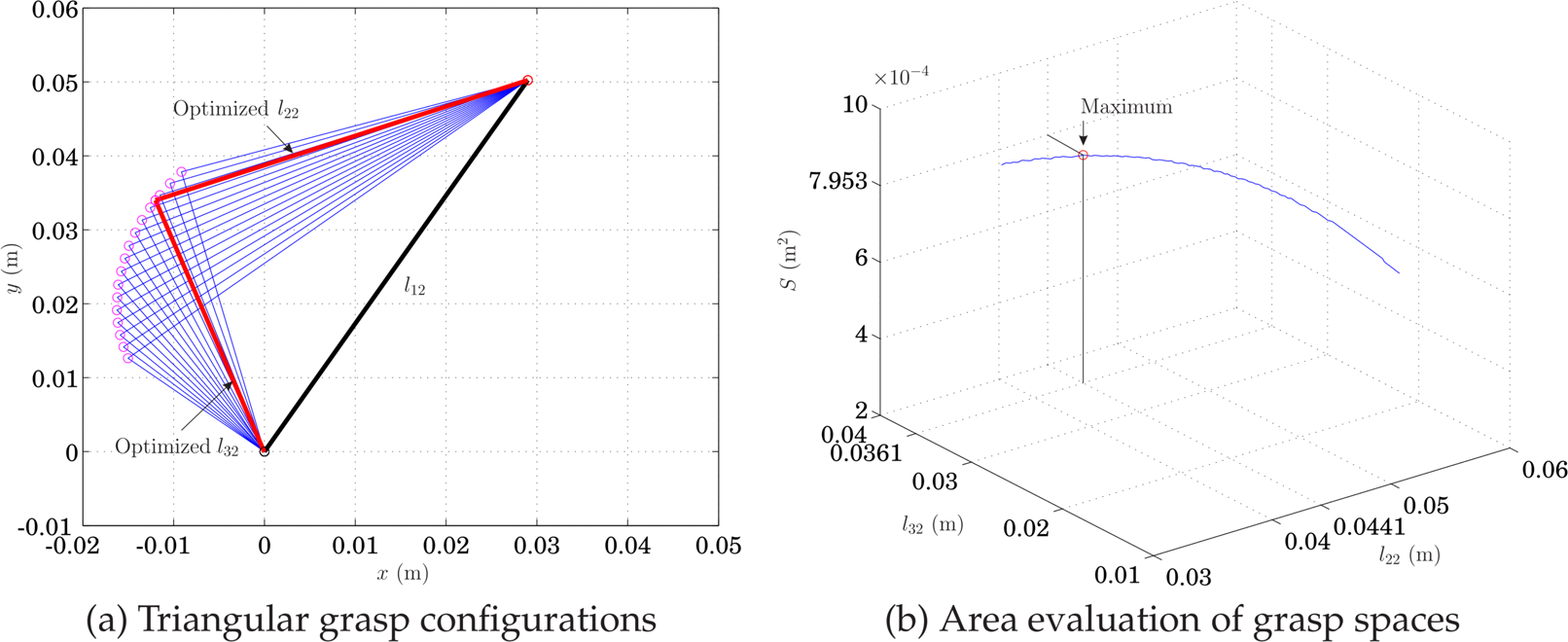
In addition, a triangular grasp configuration formed in the maximal folding, as shown in Fig. 3, has been considered as a practical model for effective robotic grasping. Since the triangular grasp space is dependent on the combination of the three link parameters of the finger, we try to find the combination of the three link parameters maximizing the grasp space and simultaneously satisfying the constraints (2)∼(5) by using an algorithm. In practice, the area of the grasp space S in Fig. 3 can be obtained by

where

and

Consequently, the procedure of identifying the length parameters for the i th humanoid robot finger can be summarized as the algorithm below:
Initialize the length parameter of the proximal phalanx l1i as a proper value by anticipating the desired total size of the i th humanoid finger.
Assign the IJC parameter for the finger. Basically, a value between 0 and 1 can be chosen as the IJC parameter according to applications, and in this paper we set it as 0.62 based on the observation of human fingers.
Find the candidates of the length parameters of the middle and distal phalanges l2i and l3i, respectively, by considering the interphalangeal joint coordination of the finger and its motion range satisfying the triangular configuration.
Extract the candidates satisfying the constraints among the phalanges given by (2) and (3).
Compute the area of the grasp space by using (6)∼(8), formed by the candidate parameters extracted in Step 4 and compare them, and find the final length parameters, l2i and l3i, maximizing the grasp space of the finger in the candidate parameters.
Estimate the total size of the finger. If the total size of the finger computed by (1) is available for the hand mechanism required by the application in question, assign the finger's phalangeal parameters as the corresponding length parameters obtained in Step 5 and finish the algorithm. Otherwise, go to Step 1 and repeat the algorithm after increasing the size of the proximal phalanx when the finger's total size is less than the desired finger, or repeat the algorithm after decreasing it.
The goal of this section is to verify the usefulness of the proposed BOSHRF algorithm described in Section 2 through exemplary design examples of humanoid robot fingers.
For the purpose, we considered the four humanoid fingers shown in Fig. 4 and performed several simulations to find the optimal length parameters of the four fingers by using the BOSHRF algorithm. The proximal phalanges of those fingers have been initialized as Table 1 for the simulation study. All of the interphalangeal joint coordination parameters of those fingers have been assigned by 0.62 based on the observation of human fingers [20]. Each joint angle, the next step has been updated by 0.2°.
Proximal phalangeal parameters initialized for humanoid robot fingers

Proximal phalangeal parameters initialized for humanoid robot fingers
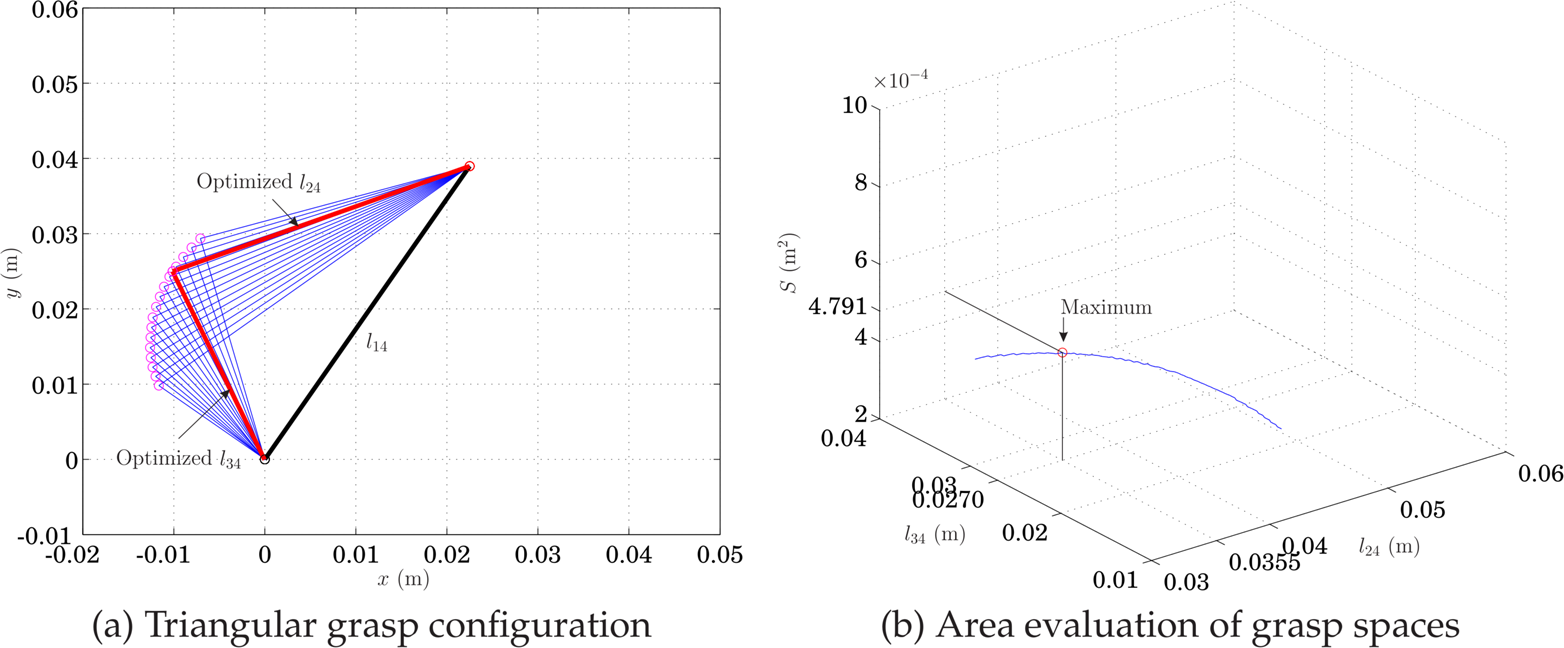
Fig. 5(a) shows some candidate configurations of the index finger satisfying the constraints (2) and (3) in the first simulation by using the BOSHRF algorithm. For effective verification, the configurations plotted in this paper have been sampled from the original database of all the candidates. Of course, the optimized configuration has been included in each case. The physical areas of the triangular grasp configurations of Fig. 5(a) have been computed by (6) and the areas of those grasp spaces have been shown in Fig. 5(b), where we can find the case maximizing the grasping space of the finger. Thus, the optimal grasp configuration could be found in Fig. 5(a), and we can finally determine the length of the corresponding phalanx of the finger. In particular, the optimal middle phalanx and the distal phalanx of the index finger can be determined as l2i =0.0389 m and l3i =0.0304 m, respectively.
Next, the same optimal design procedures for the middle, ring and little fingers have been performed repeatedly and their results have been shown in Figs. 6, 7 and 8. The optimal phalangeal length parameters l2i and l3i of the four fingers found by using the BOSHRF algorithm have been summarized in Table 2. It is actually confirmed that the middle phalanx of the i th finger l2i is greater than the distal phalanx l3i, and the total size of each finger has been determined in the following order L2 > L3 > L1 > L4. It is acceptable as a natural result by considering the constraints inherent in normal human fingers.

Four humanoid fingers: (a) 1: index finger, 2: middle finger, 3: ring finger, 4: little finger, and (b) general configuration of those fingers
Phalangeal parameters of humanoid robot fingers where the phalangeal length parameters, l2i and l3i, have been optimized by the BOSHRF algorithm with λ i =0.62

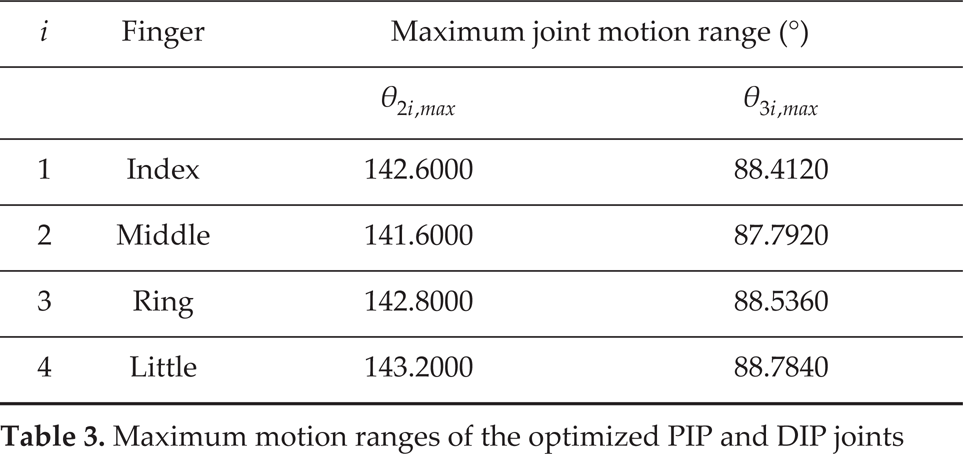
Table 3. shows the maximum motion ranges of the PIP and DIP joints of the humanoid robot fingers optimized by the BOSHRF algorithm. In fact, these ranges enable each finger to form an optimal triangular grasp with maximal flexion motion, and each range can be used for the joint motion constraint of each finger in practice.
Maximum motion ranges of the optimized PIP and DIP joints
Through the exemplary design procedure, we showed that the length parameters of a humanoid robot finger can be determined systematically by considering biomimetic constraints such as length constraints in human fingers, the inter phalangeal joint coordination parameter and the grasp space of a human finger. As a result, we can say that the proposed BOSHRF algorithm is valuable for the effective determination of the phalangeal length parameters of the humanoid robot fingers.

Optimal design of the index finger by considering triangular grasp configurations and l11 = 0.050
Optimal design of the middle finger by considering triangular grasp configurations and l12 = 0.058

Optimal design of the ring finger by considering triangular grasp configurations and l13 = 0.055
Optimal design of the little finger by considering triangular grasp configurations and l14 = 0.045
In order to analyse the potential feature of the BOSHRF algorithm, we additionally show the coordinated motion of the humanoid robot fingers designed in Section 3.
For this purpose, it is significant to show the fingertip trajectory and joint configuration of each finger for a flexing task in planar space. In fact, such a flexing task is considerable for the power grasping of an object [24]. For the effective demonstration of such a flexing task by multiple humanoid robot fingers, the MCP and PIP joint motions of the i th finger have been assigned as follows,


where the maximum motion range of each MCP joint θ1i,max has been assigned empirically as 90°, and the maximum motion ranges of the PIP and DIP joints, θ2i,max and θ3i, have been assigned by the corresponding values in Table 3.
Of course, the DIP joint of each finger is simultaneously actuated by (5). As such, the actual fingertip trajectory of the i th finger can be identified by


where x fi and y fi denote the x - and y -directional positions of each fingertip, as shown in Fig. 4(b), respectively. The parameter l ji represents the length of the j th link of the i th finger. The parameters abbreviated for effective description have been defined as follows: s1i = sin(θ1i), s1i2i = sin(θ1i + θ2i), s1i2i3i = sin(θ1i + θ2i + θ3i), c1i = cos(θ1i), c1i2i = cos(θ1i + θ2i), and c1i2i3i = cos(θ1i + θ2i + θ3i).
Phalangeal parameters of humanoid robot fingers optimized by the BOSHRF algorithm in terms of the total size

The sequential joint configurations of the designed humanoid robot fingers for the flexion motion have been shown in Fig. 9. Fig. 10 shows the fingertip trajectories of the four fingers according to the sequential joint motions shown in Fig. 9. The circles in Fig. 10 indicate the sequential fingertip positions of the four fingers and the mark O1i indicates the origin of the MCP joint of the i th finger, Each fingertip actually moves from the initial position (E) to the destination (F) with respect to the origin of each MCP joint. From those figures, it is interesting to confirm consistent flexion patterns during the grasping process. Actually, such a coordination could be made by utilizing IJC given by Λ i .

Joint configurations of humanoid robot fingers for flexion motion
The IJC parameter can be changed according to the applications [20]. The final closed-loop grasp posture is actually available for maintaining the stability of a power grasp. Furthermore, we can experience that the overall shapes of those trajectories are very similar to the grasp patterns of human fingers. In fact, such a coordinated finger motion is advantageous to grip an object dexterously.

Fingertip trajectories of humanoid robot fingers for flexion motion, whereby 1: index finger, 2: middle finger, 3: ring finger, and 4: little finger
In addition, in order to provide a guideline for effectively setting the phalangeal length parameters of a humanoid robot finger, we enabled the BOSHRF algorithm based on the total size of the finger. In this simulation, it was necessary to confirm recursively the desired total size of the finger during the process of the algorithm. The optimization results for 10 exemplary cases of humanoid robot fingers have been specified in Table 4. For instance, if a user wants to design a 20 cm humanoid robot finger, he can use the phalangeal parameters of the sixth case from Table 4 as follows: l16 = 8.39 cm, l26 = 6.61 cm and l36=5.03 cm. Thus, Table 4 can be utilized as a practical guideline for us to design a humanoid robotic finger as well as a prosthetic finger [17, 25]. In practice, the BOSHRF algorithm is usefully applied to adjust the phalangeal length parameters due to some additional mechanical considerations. As a comparison, Zollo et al. [26] performed a theoretical design study of an anthropomorphic artificial hand. Their approach was similar to our approach from the viewpoint of mimicking the natural motion of the human fingers, but they assigned the hand finger dimensions by using an anthropometric database. Thus, the problem determining the link length parameters of a different-sized humanoid finger cannot be observed.
Through the analysis, we can recognize the applicability of the proposed BOSHRF algorithm. That is, the BOSHRF algorithm is available for the effective determination of the length parameters of various humanoid robot fingers systematically. Since the phalangeal parameters of the humanoid robot fingers obtained by the BOSHRF algorithm have been determined by employing the interphalangeal joint coordination of a human finger, a human-like finger trajectory pattern can be modulated by using a humanoid robot finger. Therefore, it is noted that the BOSHRF algorithm can contribute to the generation of dexterous human-like finger motions.
The main contribution of this study is that the phalangeal parameters and the total size of a humanoid robot finger can be effectively determined by the proposed BOSHRF algorithm. An interphalangeal joint coordination factor and the length constraints based on the observation of human fingers have been used for the optimization algorithm, and they are actually helpful in generating a dexterous human-like finger motion. The grasp space of a humanoid robot finger plays an important role in deciding the phalangeal length parameters of the finger during the process of the algorithm. Through exemplary design examples for humanoid robot fingers, we demonstrated the effectiveness of the optimization-based finger design method. The specified guidelines are helpful for us to assign the phalangeal length parameters of a humanoid robot finger in terms of the design aspect. The analysis of the configuration-based features and the coordinated motions of the humanoid robot fingers designed are also remarkable effective grasping.
We finally conclude that the proposed BOSHRF algorithm can be applied to design dexterous humanoid robot fingers as well as prosthetic fingers. Furthermore, our approach can be extended to consider the grasp volume formed by multiple fingers for the effective design of a humanoid hand. Furthermore, our formulation can ultimately contribute to dexterous human-like robotic manipulations. In addition, the practical application of the approach is of interest for our future work.