
Abstract
A gait identification method for a lower extremity exoskeleton is presented in order to identify the gait sub-phases in human-machine coordinated motion. First, a sensor layout for the exoskeleton is introduced. Taking the difference between human lower limb motion and human-machine coordinated motion into account, the walking gait is divided into five sub-phases, which are ‘double standing’, ‘right leg swing and left leg stance’, ‘double stance with right leg front and left leg back’, ‘right leg stance and left leg swing’, and ‘double stance with left leg front and right leg back’. The sensors include shoe pressure sensors, knee encoders, and thigh and calf gyroscopes, and are used to measure the contact force of the foot, and the knee joint angle and its angular velocity. Then, five sub-phases of walking gait are identified by a C4.5 decision tree algorithm according to the data fusion of the sensors' information. Based on the simulation results for the gait division, identification accuracy can be guaranteed by the proposed algorithm. Through the exoskeleton control experiment, a division of five sub-phases for the human-machine coordinated walk is proposed. The experimental results verify this gait division and identification method. They can make hydraulic cylinders retract ahead of time and improve the maximal walking velocity when the exoskeleton follows the person's motion.
Keywords
1. Introduction
The lower extremity exoskeleton is a concept in human-machine coordinated motion. The exoskeleton tracks the person's motion with load bearing. It involves mechanical structure, gait identification, hydraulic control and power supply. Recently, the lower extremity exoskeleton has been developed to carry out many action modes, including walking, running, up and down hills, squatting, etc.
DARPA has performed many researches since 2000 on the exoskeleton in order to improve soldiers' load capacity. Thus, the exoskeletons called “BLEEX” and “XOS” have arisen [1,2]. Lockheed Martin has redesigned the second-generation prototype of BLEEX and renamed it the “Human Universal Load Carrier” (HULC) [3]. Japan has developed the first commercial exoskeleton called “HAL” [4]. HAL can help disabled people to walk independently at a speed of 4 km/h and get up and down stairs easily.
In 2000, Atkeson [5] offered conclusions about the characteristics of the humanoid robot: sometimes, the motion of the machine is guided by a person, but sometimes just the opposite is the case; sometimes, especially, the boundary is not clear between the two. This is the key point about the humanoid robot. Kim [6] presents a motion estimation method for the case of mismatched DOF between person and machine. A motion control model is also constructed in the form of a 7-DOF upper limb exoskeleton. The test results show that 20 % energy is saved.
Kwon [7] utilizes an s-EMG feature signal of the lower limb to identify the motion gait of patients with cerebral palsy. This method is much simpler and more practical compared to 3-D motion measurement combined with the method for sensing ground reaction force. David [8] uses the data fusion method including ankle angle and the forces of both feet to establish a standard gait prediction model. The law of motion of the human gait is learned and trained by some machine learning algorithms such as nearest neighbour, time slicing, etc.
Cempini [9] presents a compatible design method for analysing the mismatched movement present in the human-machine interaction. A self-correction device is designed to improve the coordination between human joints and the wearable robot. Oskoei [10] uses support-vector-machine method to identify the upper limb movement by the s-EMG feature collection. The test results show that this method can improve the identification accuracy and response of the upper limb. Carrozza [11] utilizes four-foot piezoelectric switches and an integrated electronic unit for human gait identification in the stance stage of walking duration.
Wakita [12] measures the human-machine contact force to establish an observation model for the intent of human movement. This method can identify the direction in a wide range of walking gaits by fuzzy threshold detection and Kalman filter. The University of California uses five tape-switch sensors in the shoes to identify the gait of the exoskeleton [13]. This method can identify seven gait phases in walking duration. An inclinometer is installed on the back of the exoskeleton to identify human squat and up-squat. Some researches on gait identification in rehabilitation training robots are developing domestically [14, 15]. Human motion can be identified by EMG, EEG and fibre-optic signal. Some gait identification methods include pattern recognition and neural network classifiers [16].
This paper present a walking gait division and identification method to improve the real-time reliability of exoskeleton when tracking a person. First, the difference is analysed between the law of human-machine coordinated motion and that of natural human walking. Secondly, a sensor layout for the lower extremity exoskeleton is designed. Then a method of dividing the walking gait into five sub-phases is introduced. At the same time, a C4.5 decision tree algorithm is presented to identify the sub-phases of the gait. The experiment on coordinated motion with load bearing verifies the rational gait identification algorithm.
2. Sensor layout
2.1 Introduction of exoskeleton prototype
The prototype of exoskeleton is shown in Figure 1. Once the person is wearing the prototype, other people hang loads in the mechanical back-rack. Then, gait sensing and hydraulic control subsystems begin to work. The person's walking gait is identified by sensors installed in the mechanical legs and sensing shoes. At the same time, the hydraulic actuators are driven by the control command to extend or retract. Thus, the exoskeleton can quickly track the person's motion with a certain aid-force effect.
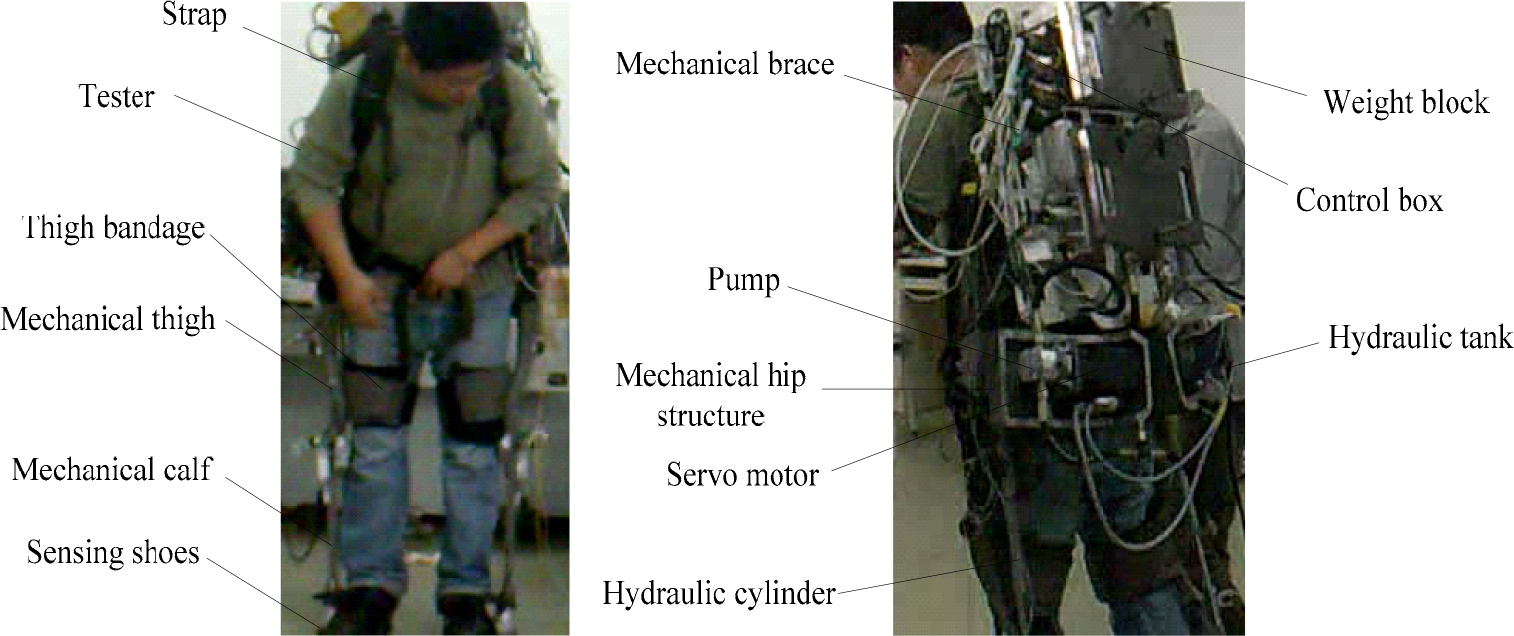
The prototype of lower extremity exoskeleton
2.2 The sensor layout
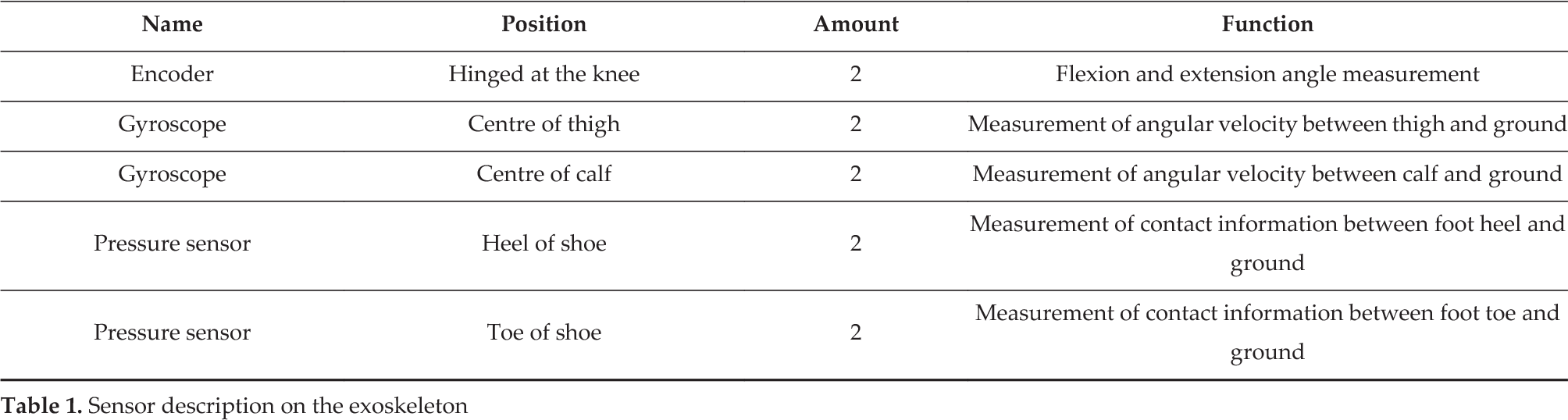
For a wearable and convenient exoskeleton, the sensors can only be installed on the mechanical structure, not on the human body. Figure 2 shows the sensor layout of the exoskeleton. The initial angle θ0 is a constant value of 157° when the exoskeleton is perpendicular. The range of knee angle θ k measured by encoder is 0° to 73° approximately. The fixed positions and function descriptions for these sensors are listed in Table 1.
Sensor description on the exoskeleton

Sensor layout of lower extremity exoskeleton
3. Walking gait law of human-machine motion
The walking gait can be identified by the sensing subsystem. Thus, the exoskeleton can suit human motion and drive the hydraulic actuator to control the knee joint's movement. Because sensors are only allowed to be installed on the exoskeleton, the motion of the exoskeleton usually delays the person if a simple motion identification method used. Furthermore, there are many constraints on the sensing shoes, the straps, and the back-rack for the person in a case of load bearing. Therefore, the walking gait law is certainly different for coordinated motion and natural walking.
3.1 Law of natural gait in human beings
In walking mode, the gait duration is formed from the foot heel touching the ground to when it touches it again [17, 18]. Each gait duration is divided into two phases: double leg support and single leg support. The duration of the double support phase is about 20% of walking duration. This duration changes at different walking speeds, and is longer in slower speeds.
If one leg is concerned, a walk duration is divided into two phases including the stance phase and the swing phase. The duration of stance phase is about 60 % of walking duration, and the swing phase is about 40 %. The stance phase is divided into four stages, which are the heel strike stage, the full foot touching the ground stage, the mid-stance phase, and the heel-off stage. The swing phase is divided into three stages which are the posterior swing phase, the mid-swing stage, and the anterior swing phase.
A strong man with a height 1.75 metres, 70 kilograms in weight, is selected for the test. The dynamic knee angle is shown in Figure 4 at the walking speed of 3 km/h. The knee angle changes from 0° to 75°. In stance phase, the knee angle changes from 0° to 25°. In swing phase, it is from 0° to 70°. A gait duration is about 1.2 s. Because the pace of the person is arbitrary in the walking duration, the standard gait can be constructed gradually through enough training.

Natural walking gait phase of person

The natural walking test at the walking speed of 3 km/h and the knee angle variation
Due to different gait frequencies and interval lengths, the range of the knee angle and its angular velocity are different. Thus, the standard gait library needs to be constructed using a mathematical model. Then, in the experiment, the person should fit the standard gait with different frequencies and intervals.
3.2 Law of human-machine coordinated gait
When the person wears the exoskeleton, the knee angle is measured by the encoder. Figure 5b shows the human-machine coordinated motion with load bearing. The heel strike stage, mid-stance phase, heel-off stage and posterior swing phase are weak and result in foot trampling. This means that in the stance phase, there is insufficient time to display the heel strike stage and the heel-off stage. In the swing phase, the posterior swing phase is not displayed.

The test scene of human-machine coordinated walk and the knee angle variation
These different phenomena are caused by two factors. First, due to some constraints of the exoskeleton, the person will bear a certain load himself. So the person's centre of gravity is not easy to adjust. The walking gait is simplified to guarantee the human-machine system does not fall.
Secondly, the response of hydraulic control system is slow even though the gait phases are identified on time. This causes the motion delay of the exoskeleton's tracking of the person.
Therefore, the gait identification method needs to distinguish more useful phases to utilize the control logic well. The control algorithm needs to carry out the command ahead of time.
4. Walking gait identification method
4.1 The division of gait into sub-phases for coordinated motion
Based on the analysis of results in section 3.2, the law of the gait of human-machine coordinated motion can be divided into three or five sub-phases.
As shown in Figure 6, the three sub-phases are: 1) double standing; 2) right leg swing, left leg stance; and 3) right leg stance, left leg swing.

Two types of sub-phase division of the human walking gait
The five sub-phases are: 1) double standing (D_Stand); 2) right leg swing, left leg stance (Rsw_Lst); 3) double stance with right leg front and left leg back (Rst_Lst); 4) right leg stance, left leg swing (Rst_Lsw); and 5) double stance with left leg front and right leg back (Lst_Rst). If the walking action does not stop, the gait switches directly to the second phase after the fifth phase has been passed.
If the walking gait is described as three sub-phases, the gait identification is relatively simple and reliable. Because the human consciousness is much faster than the responses of the gait identification algorithm and the hydraulic control loop, the three sub-phase division cannot solve the lag problem of the exoskeleton. In particular, when the walking speed is more than 3 km/h, the delay time is more than 0.3 s for the exoskeleton's tracking of the person.
On the other hand, a seven phase division will create high occurrence of gait misjudgement This means the hydraulic control system cannot deal with the switching process effectively in the three sub-phases of the stance stage. The stance stage is also simplified into full foot phases. Therefore, the hydraulic control system has difficulty driving the actuator quickly against the transient gait phases. If the control system switches frequently in a gait duration, the hydraulic cylinder vibrates continuously with poor stability and reliability. Here, the walking gait is divided into five gait sub-phases which can be identified by the C4.5 algorithm.
4.2 Design of the C4.5 decision tree algorithm
The identification and optimization of five gait sub-phases is carried out by the C4.5 algorithm [19]. The test data are collected for the human-machine coordinated walk with a non-powered hydraulic actuator. To divide the walking gait phases reasonably, a group of samples covering all the gait sub-phases is selected, as shown in Table 2. Thus, a standard sample library of the walking gait is constructed to obtain the main motion information of the exoskeleton in several motion periods. This sample library, which includes 1500 individuals, is used for the design of the C4.5 decision algorithm.
The standard sample library of five gait sub-phases in walking mode

The motion information for the exoskeleton is collected by four pressure sensors on the shoes, two encoders on the mechanical knee, and four gyroscopes on the mechanical calf and thigh. The symbols “fl”, “fr” are the pressures of the shoes contacting the ground. The range is from 0 to 1 V. The symbols “θ kl ”, “θ kr ” are the left and right knee angles, respectively (the angle value can be regulated to 0 in the double standing sub-phase). The symbols “ωkl”, “ωkr” are the left and right knees' angular velocities, respectively.
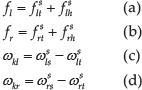
The symbols “fs lt ,” fs lh “are the pressure voltage values of toe and heel for the left shoes. The symbols” frst “,”fs rh ” are the same for the right shoes.
The pressure voltage is proportional to the load. It is computed by

The symbol “Rs” is the range of the pressure sensor, the value of which is 200 kg. The symbol “Vs” whose value is 5 V is the maximum voltage corresponding to Rs. The symbol “η” is the measured area efficiency due to the small contact area of the pressure sensor. η is chosen as 0.1. So the maximum value of the pressure's voltage is no more than 1V.
The symbols “
The range of the knee angle is from 0° to 73° in normal walking, as shown in Figure 4. So the maximum value of knee angular velocity is computed by

The symbol “Fw” is the frequency of the walk, the value of which is 1 Hz with the normal speed of 4 km/h. The symbol “μ” is the duration of swing phase in a walk duration. The value of this duration is about 40 % as shown in Figure 3.
According to the standard sample library, the division rules for the five walking gait sub-phases are as listed below.
if f l > fmax, f r > fmax, θ kl < θmax, θ kl < θmax, then gait = D_Stand;
if f l > fmax, f r < 0.5fmax, then gait = Lst_Rsw;
if f l > 0.5fmax, 0.5fmax < f r < fmax, θ kl < 2θmax, then gait = Lst_Rst;
if f r > 0.5fmax, 0.5fmax < f l < fmax, θ kr < 2θmax, then gait = Rst_Lst;
if f r > fmax, f l < 0.5fmax, then gait = Rst_Lsw.
Here, the foot pressure threshold fmax and the knee angle threshold θmax should be designed. The threshold of foot pressure fmax is set as follows:

Tthr is the response time of the foot pressure from 0 to its threshold f max. Λ is the sensitivity factor of contacting the ground, which is chosen as 0.1. If Fw is 1 Hz, and μ is 40 %, then Tthr is 0.06 s. A simple test can then be done by the person stamping on the sensor shoes to acquire the foot pressure response. The value of threshold fmax can be found in Figure 7. Here this value is chosen as 0.15. The knee angle threshold θmax can be regulated from 10° to 30° according to the person's comfort.
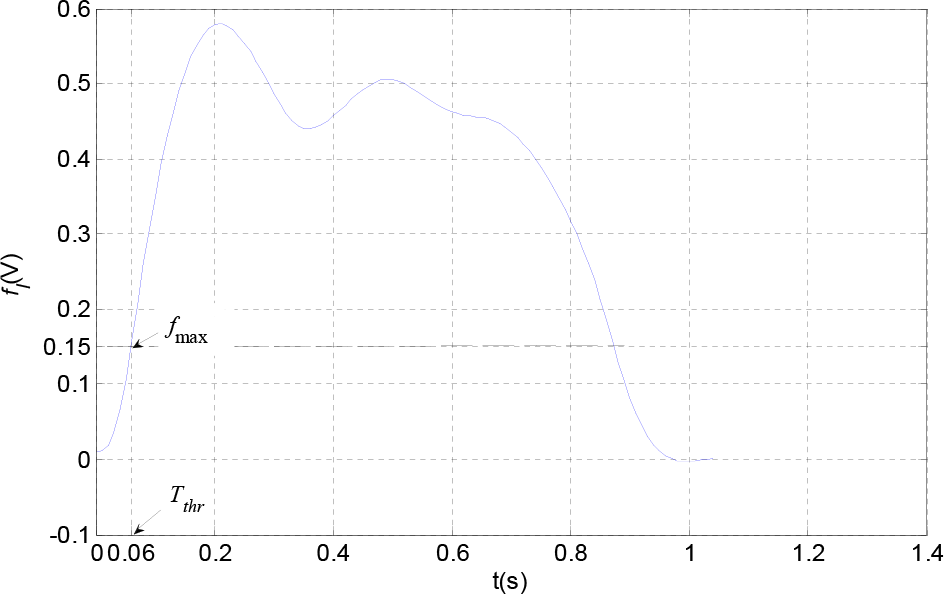
The foot pressure response in walk duration
Then 500 individuals selected randomly from the sample library are classified and crossed by the C4.5 algorithm. The optimization results are shown in Table 3.
The optimization results of the statistical error using C4.5 algorithm

The confusion matrix for gait classification is shown below. Equation (5) shows that the false results of gait sub-phase identification arise in the non-main diagonal of the confusion matrix. The gait sub-phases including Rst-Lst and Lst-Rst are easy to misjudge because the transition time of these phases is very short in the human-machine coordinated walk. The other three sub-phases are easy to distinguish.

4.3 Simulation of the C4.5 decision tree algorithm
Through the C4.5 decision classification algorithm, five sub-phases of human-machine coordinated gait are optimized. The decision tree of gait identification in walking mode is shown in Figure 8. It shows the right and wrong instances of gait identification in the 1500 samples. There are several false instances of gait identification which are the same as those of the confusion matrix. According to this decision tree, the real-time walking gait sub-phases will be identified and guide the control algorithm to control the hydraulic actuator.
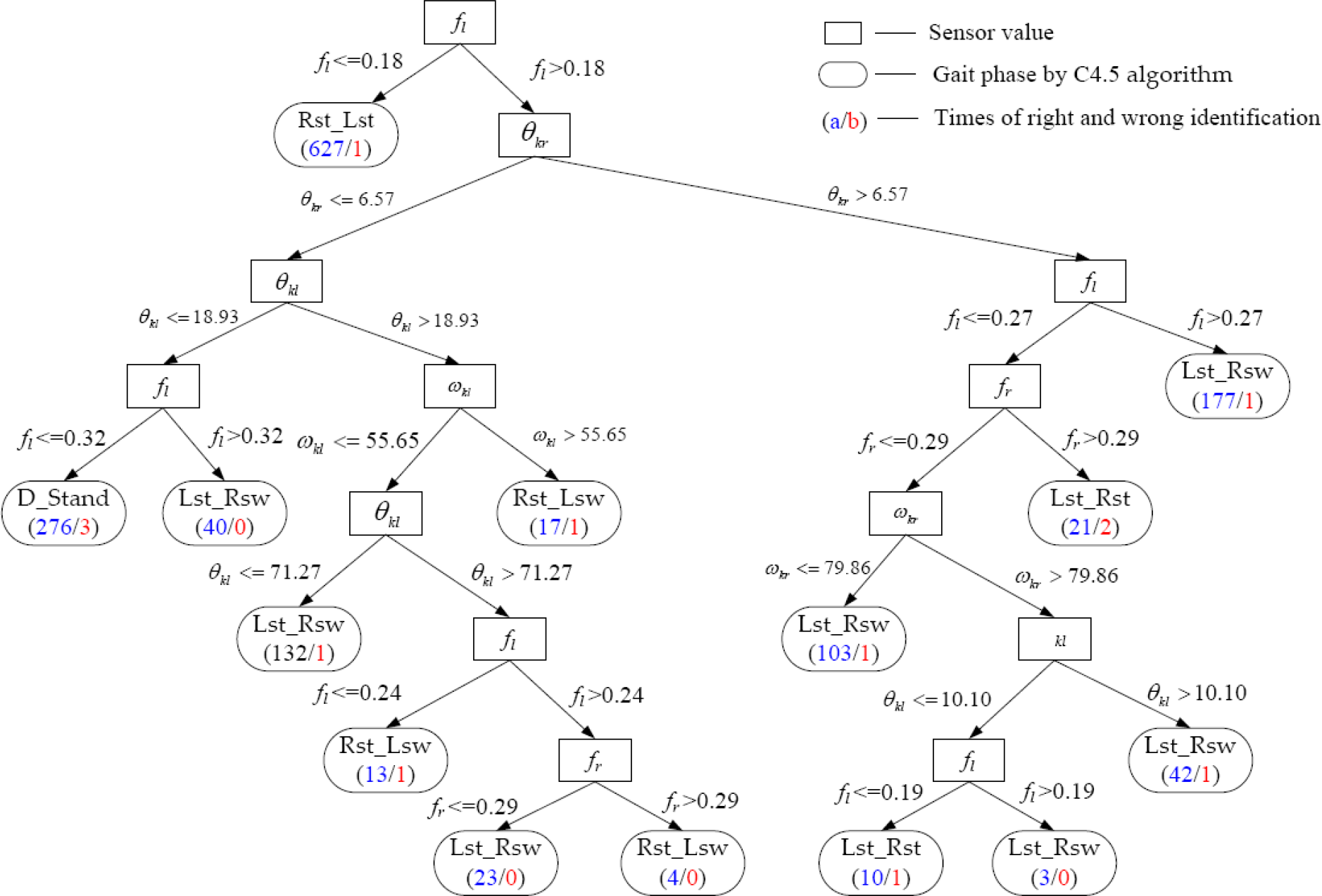
The decision tree of walking gait identification
Here, only the knee joint and foot pressure information is considered. But this information is not sufficient to express the lower limb movements. If the ankle and hip angles and their velocities are covered in the C4.5 algorithm, the gait phase identification will be more exact and faster than the current algorithm. The walking gait may be divided into more gait phases. However, due to the size limit of the exoskeleton's leg, one cannot install too many sensors.
5. Gait identification experiment
5.1 Human-machine coordinated test scene
The experiment is carried out in a laboratory with an area of approximately 200 m2. When the person prepares to walk, he will begin at double standing pose. Then the right leg swings after the second phase is identified by the C4.5 algorithm. At the same time, the right hydraulic cylinder is retracted quickly by the control algorithm. The second phase ‘Rsw_Lst’ ends until the right leg contacts the ground.
Then, the third phase ‘Rst_Lst’ is identified, and the right hydraulic cylinder is extended. Simultaneously, the left hydraulic cylinder has retracted early in order to improve the response of the exoskeleton. Thus, the third phase may be much shorter than the second phase.
When the left leg is off the ground, it switches to the fourth phase, ‘Rst_Lsw’. The left hydraulic cylinder has retracted and the right is extended by the control algorithm. The fourth phase ends until the left leg has contacted the ground. The five gait phases switch periodically and automatically.
The experiment on human-machine coordinated walk is shown in Figure 9.

Experiment with five waking gait sub-phase
5.2 Walking gait identification results
Once the tester is wearing the lower extremity exoskeleton, the human-machine coordinated walking test with overloading weight of 60 kg is carried out. The test process has a time consumption of 72 s and a walking distance of 50 m. The gait test results are shown in Figure 10 and are validated as consistent with the walking gait division in Figure 6. Therefore, this gait identification method is valid for human-machine coordinated walk.

The switching results of the walking gait phase (g1 – D-Stand, g2 – Rsw-Lst, g3 – Rst-Lst, g4 – Rst-Lsw, g5 – Lst-Rst)
In a gait's duration, although the transition time of the double leg stance phase is significantly less than that of the single leg stance phase, the double leg stance phase must be revealed as one leg stance switches into another leg stance. This means that the three sub-phase division is a simplified form of the five sub-phase division.
In order to improve the exoskeleton to track human motion, two sub-phases, “Rst_Lst” and “Rst-Lsw”, are merged. That means that if either sub-phase “Rst_Lst” or “Rst-Lsw” is identified, the hydraulic cylinder makes the left leg retract quickly. The sub-phases “Lst_Rst” and “Rsw-Lst” are similar to the above.
Because the hydraulic actuator is a single-acting piston-cylinder, the retraction of the cylinder is controlled by the person, not by the exoskeleton. The person needs force and reaction time to retract the cylinder. If the cylinder cannot retract quickly ahead of time in sub-phases “Rst_Lst” and “Rst-Lsw”, or “Lst_Rst” and “Rsw-Lst”, it will cause a motion delay in the _ exoskeleton's tracking of the person.
The displacement feedback control law of the hydraulic cylinder [20] is designed by the PI control method shown as follows:

where Yiexp,


where θ k is the current knee angle measured by the knee encoder, θ k exp is the desired knee angle given by section 3.1, and l1, and l2 are, respectively, the distance parameters between the hydraulic cylinder and the knee.
5.3 Validation of motion information
The experiment on human-machine coordinated walk with 50 kg load bearing is carried out by the hydraulic cylinder displacement feedback control method. The knee angles, the foot pressure, the knee angular velocities, and the servo-valve control current are shown in Figures 11–14.

The change of left and right knee angles (g1 – D-Stand, g2 – Rsw-Lst, g3 – Rst-Lst, g4 – Rst-Lsw, g5 – Lst-Rst)

The change of foot pressure sensor values
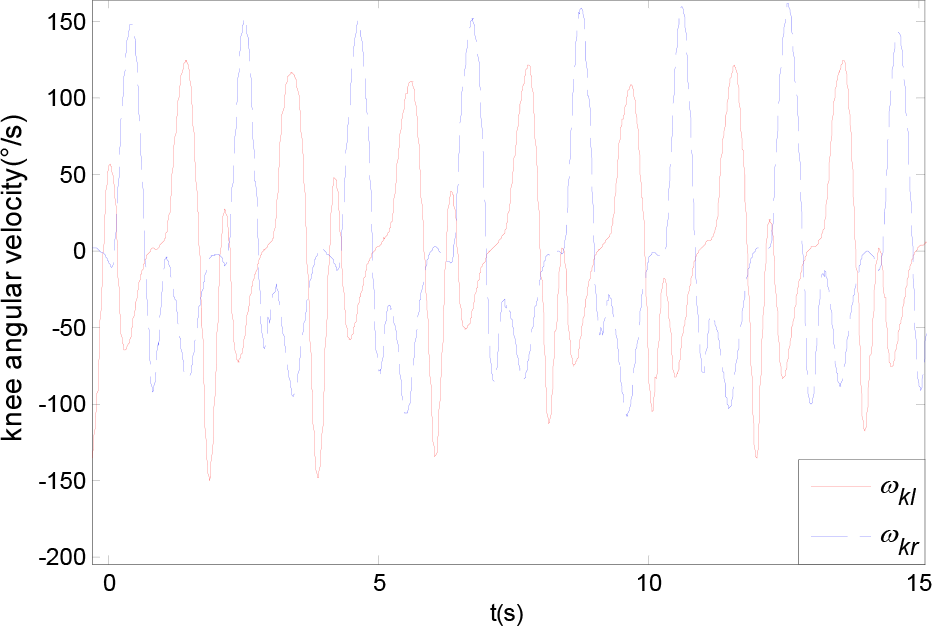
The change of left and right knee angular velocities

The change of control current of two servo-valves
In walking duration, the left and right legs switch repeatedly. So some movement information switches frequently too. These results show that the human-machine coordinated walking gait can be identified by the gait identification algorithm.
In Figure 11, two knee angles change periodically, corresponding to the switch results of the five gait sub-phases shown in Figure 10. Figure 12 shows the measured values of foot pressure, which represent the sensor shoes contacting the ground. Although the changes are analogous, the left and right foot pressures are not of the same amplitude. This asymmetry in the experimental result is caused by some different constraints of the exoskeleton mechanical structure. The angular velocities results of the two knee joints in Figure 13 show that some slight chatter arises in the right leg of the exoskeleton, while the left leg is well regulated to realize the walking gait in human-machine coordinated motion. In Figure 14, the control currents of two servo-valves are immediately switched into -Imax to improve the response of the hydraulic cylinder displacement once the stance phase is switched to the swing phase when identified by the exoskeleton. In the stance phase of one leg, the servo control of the hydraulic cylinder's displacement is realized by PI control, as shown in Equation (6).
A performance test for different gait sub-phases is shown in Table 4. If the walking gait is divided into three sub-phases, the person obviously feels a delay effect in the exoskeleton's tracking of the person's motion. There is some resistance to the person's leg bend. So the person needs to supply extra joint torque on the hip and knee to assist the swing of the exoskeleton, which will produce muscle fatigue over a long time. Therefore, the maximal walking speed is not more than 1.5 km/h and the walk duration is 5 min. If the walking gait is divided into five sub-phases, the hydraulic cylinders are retracted ahead of time by the hydraulic control algorithm once the double leg stance phase is identified by the gait identification algorithm. Therefore, the five sub-phase division can make the person swing the leg comfortably. The maximal walking speed and duration will be significantly improved.
The performance test for different gait sub-phases

6. Conclusion
In this paper, a walking gait identification method is presented for human-machine coordinated motion. Different sub-phases are studied, so the five sub-phase division of the walking gait is suitable. The C4.5 decision tree algorithm is designed by a machine learning process through fusion of data including the contact force of foot, the knee joint angle and its angular velocity.
The experiment on human-machine coordinated walk is carried out with 50 kg external loads on the exoskeleton. The experimental results show that these walking gait sub-phases can be switched comfortably for the person. Compared to the three sub-phase division, this gait sub-phase division is increased by two double leg stance phases (one leg in front, the other leg behind) in order to control the hydraulic actuator retraction in advance. Thus, the maximal walking speed of the human-machine coordinated walk is improved.
Footnotes
7. Acknowledgements
We thank the Quartermaster Equipment Institute of the General Logistics Department of the Chinese People's Liberation Army for project funding assistance. This research was supported by the National Natural Science Foundation of China (Grant No. 61305092) and the project was funded by a China Postdoctoral Science Foundation (Grant No. 2013M542487).