
Abstract
This paper focuses on the consensus problem of multiple high-order systems with uncertainties. Since it is difficult to use matrix theory approaches to design consensus controllers for a class of multiple high-order uncertain nonlinear systems, in this paper a set of consensus control laws are proposed by employing adaptive control theory and a backstepping technique. The distributed virtual control functions of the multi-agent systems are elaborately constructed by only using their local information in the recursive controller design procedure. Furthermore, the asymptotic stability of the overall interconnected system is proved relying on the Lyapunov stability analysis method. Finally, simulations are provided to verify the effectiveness of the control algorithms.
1. Introduction
Over the past decade in particular, the cooperative control of multi-agent systems has received increasing attention given the fact that many benefits can be obtained when a single complicated agent is equivalently replaced by multiple simpler agents. Numerous results have been obtained to solve a variety of multi-agent cooperative control problems [1–6,13–17]. In the distributed control of a group of autonomous agents, the main objective typically is to have the whole group of agents working in a cooperative fashion throughout a distributed protocol. These controllers are distributed in the sense that the controller design for each agent only requires relative state information between itself and its neighbours. Hence, coordination refers to a close relationship among all agents in the group where information sharing plays a crucial role. The distributed control scheme has many advantages in achieving cooperative group performances, especially with low operational costs, fewer system requirements, higher robustness, stronger adaptivity, and flexible scalability. The control theory of multi-agent systems can be applied in many practical engineering applications, such as the cooperative control of unmanned ground/air/underwater vehicles [7–9], distributed sensor networks [10], aggregation and rendezvous control [11], the attitude alignment of spacecraft [12], and so on. Therefore, the cooperative control of multi-agent systems has been widely recognized and will be universally appreciated in the future.
Among the existing works mentioned above, most of them have studied only first- and second-order dynamics. Recently, some researchers turned their focus on higher-order multi-agent systems coordination. One motivation for studying higher-order consensus comes from observing the behaviour of flocks of birds [18]. It is often noted that such flocks fly in formation, maintaining a nominal separation from each other, but each travelling with the same velocity vector. However, sometimes a bird flock will abruptly change direction, perhaps when one of them suddenly perceives a source of danger or food. Clearly, the birds in this setting need to build consensus as to not only their relative positions and velocities, but also to their acceleration. In [19], Dong considered a group of third-order nonlinear systems with parameter uncertainties using a backstepping technique and an adaptive control method. However, the proposed control law does not work when the order of systems is larger than three. It is worth noting that the control algorithm in [19] cannot easily be extended to high-order nonlinear systems with uncertainties at each step. In [19], since the adaptation law (17) contains its neighbours' information, the control law (18) has two-hop information. When the order of the system is n, n – 1 hop information is needed to design control laws. This is unavailable, obviously. In addition, in many practical engineering applications, many systems are modelled by higher-order dynamics, for example, the jerk systems, described by third-order differential equations [20]. A single-link flexible joint manipulator is well modelled by a fourth-order nonlinear system [21–23]. It is not acceptable to model the plant dynamics with only single- or double-integrator dynamics. Hence, it is particularly important to extend the coordination problem from lower-order dynamics to higher-order ones. Compared with the first-order and second-order dynamics, the higher-order ones involve more details relating to the interactions between the system dynamics (states and their derivatives) and the communication network. Up to now, most of the existing literature has only been concerned the high-order integrators with a linear strict-feedback form ([18,24–26],etc.), which are mainly based on the matrix theory on graphs. In [18], Ren et al. showed a matrix approach-based framework for high-order integrators multi-agent systems. They defined a class of l-order (l > = 3) consensus algorithms and showed necessary and sufficient conditions under which each information variable and their higher-order derivatives converged to common values. Jiang [24] investigated the consensus problem for multi-agent systems with individual agents modelled by high-order integrators under a fixed/switching topology and zero/non-zero communication time-delays. In [25], the consensus of high-order integrators multi-agent systems with time-delays and switching topologies was studied. The coordination of high-order linear systems with disturbances was investigated in [26,27]. Discrete-time high-order linear multi-agent systems control problem was considered in [28], and the results for the general high-order linear time-invariant (LTI) systems were published in [29,30]. Huang et al. summarized a survey of recent progress in the study of distributed high-order linear multi-agent coordination in [15].
As for the consensus of multiple high-order nonlinear systems, only a few results have been proposed. Dong et al.[31] considered the tracking control problem. Distributed robust/adaptive control laws were proposed such that the states of each system converged to the desired trajectory asymptotically. However, the model of the systems is without uncertainties. Because of the inherent characteristics of multiple linear systems, matrix theory approaches are frequently used in stability analysis. However, in many practical applications, the dynamics of the systems are not only nonlinear but also have uncertainties, thus solving consensus problems for multiple high-order uncertain nonlinear systems, which would make great sense for practical applications. Matrix theory-based frameworks are not applicable in many scenarios, especially for nonlinear systems. Thus, the consensus control of high-order nonlinear systems with uncertainties is more challenging than that of certain high-order linear ones. The extension of adaptive control to high-order dynamics is not straightforward because of the growth in the order. The challenge is to make sure that both the control protocols and the parameter update laws are distributed - that is, they are allowed to depend only on locally available information about the agent and its neighbours. High-order systems contain more states and their derivatives, so the design of adaptive control becomes more complicated. This requires the careful crafting of a suitable Lyapunov function which automatically yields a distributed adaptive controller that depends only on local information. In [32], Dong first considered the adaptive consensus seeking of a class of multiple nonlinear systems using backstepping techniques. He considered two consensus problems, one with a constant agreement value and another with a reference system whose state is only available to a portion of the agents.
In this paper, we consider a class of high-order nonlinear multi-agent systems with uncertain parameters in the nth-order terms. We tried to solve the control problem under a distributed backstepping framework and we propose a detailed design process. The key to designing distributed controllers is the selection of a sequence of suitable Lyapunov functions and the adaptive laws that depend upon the communication network and the dynamics of the system. The basis for the selection of suitable graph-dependent Lyapunov functions was set out in the backstepping technique on the graph. A distributed recursive design approach is proposed to achieve the consensus of multiple high-order nonlinear systems with uncertainties. The main tasks of this paper include: 1) This paper reviews the major results and progress in distributed high-order multi-agent coordination. A type of multiple high-order nonlinear system with uncertainties is considered. 2) Distinct from the conventional matrix theory-based frameworks, a systematic controller design method/framework is proposed by combining a distributed backstepping method with adaptive control techniques. Furthermore, the convergence of the system errors is proven rigorously by virtue of the Lyapunov stability theory and Barbalat's lemma. 3) In the existing literature, only chained systems whose order is lower than three were used as the representative high-order systems, while a multiple four-order nonlinear uncertain system is implemented in this paper. A group of 11 agents is used to verify the validity of the distributed controller.
The subsequent sections are organized as follows: In Section 2, the consensus problem is formally stated and the background as well as the necessary preliminaries concerning the control problem are given. In Section 3, the cooperative control laws are proposed relying upon the backstepping method. The uncertainties of the parameters are addressed by distributed adaptive control laws. In Section 4, simulations of the consensus control for multiple four-order uncertain nonlinear systems are provided to demonstrate the performance of the proposed control laws. The last section concludes the paper.
2. Preliminaries and Problem Statement
In this section, basic graph theory for multi-agent system control and the control problem are introduced.
2.1. Basic Graph Theory for a Multi-agent System
A team of m high-order nonlinear systems labelled as systems 1 to m are considered. The communication topology among the m systems is assumed to be bi-directional and the interactions among the nodes are represented by an undirected graph
For the communication graph G with the weighted adjacency matrix
2.2. Problem Statement
In this paper, we consider multi-agent systems formed by a class of m high-order uncertain nonlinear systems in chained form. The topology of the information exchange among the systems is described by a graph


where i = 1,2,…,n – 1 denotes the orders of each system, and j = 1,2,…,m denotes the index number of the systems, and
The aim of this paper is to design a control law for the j-th system based on its own local states information when the communication topology is fixed and connected, such that:


3. Distributed Control Law Design
In this section, basic definitions are given and the local neighbourhood virtual controllers are introduced. Some requirements on the topology are laid out, and a series of Lyapunov functions are given. Finally, a detailed design procedure is given based on the recursive framework.
3.1. Local Neighbourhood Virtual Controllers
The high-order dynamics involve more details related to the interactions between the system dynamics and the communication network, which are reflected in the virtual controls and the Lyapunov functions. The m systems in (2)–(3) include strict-feedback forms. Owing to the structural character of the lower-triangular strict-feedback system, the high-rank state of each differential equation is used as virtual control. In this way, the consensus control problem for the higher order multiple systems can be broken into a sequence of design problems for multiple lower order subsystems. The extension of adaptive backstepping control to distributed multiple higher-order dynamics is not straightforward. In a cooperative adaptive controller for multi-agent systems, it is required that not only the backstepping control laws but also the adaptive laws should be distributed and designed relying on their local information.


where j = 1,…, m. αij is the virtual control function which is to be elaborately designed through the recursive backstepping method.
3.2. Recursive Controller Design Procedure
Distinct from centralized methods, the decentralized recursive backstepping method using only the local information is designed based on the sequence of virtual controllers which are also necessarily designed relying on local information. The aim of this work is to design the virtual controller not only in a recursive way, like other ordinary backstepping methods, but also in a distributed manner, which makes the design procedure much more difficult than the centralized methods. Furthermore, the previously proposed design scheme cannot be extended to deal with this case due to the complex intrinsic nonlinearity defined in (3). The actual controllers uj can be derived from αnj after αnj is designed. The detailed recursive design procedure is given as follows.
In the first step, α2j is used to denote the first-order virtual controller of system j. Using (2) for (5), we can derive that:

Consider the first-order error variable z1j = x1j of the first-order subsystem of (2)–(3), and choose the Lyapunov function candidate V1 as follows:

where
Taking the time-derivative of V1 and following (6) and (7), we can obtain:

We design the first distributed virtual controller α2j as:

Note that ajl represents the weighted adjacency between the neighbouring agents, and all the ajl hereinafter are assumed to be 1. Nj denotes the neighbour set of the j-th agent and no global information states are included in α2j. Information in communication networks only travels directly between immediate neighbours in the graph. Nevertheless, if the graph is connected, then this locally transmitted information ultimately travels to every agent in the graph.
With the aid of eqn. (10), (7) can be written as:

and V̇1 can be written as:

In the second step, and considering eqn.(6) and the second-order of eqn.(2), it is possible to obtain:

Hence, we choose the second Lyapunov function candidate V2 as:

where

In order to ensure that the time-derivative of the Lyapunov function V2 is negative definite, an appropriate α3j should be designed. We design the distributed virtual controller α3j as:

where c2j is the design parameter satisfying c2j > 0. Please note that α3j only contains its own state information and its neighbours' information without using any global information generally.
Therefore, by substituting (16) into (15), V̇2 can be rewritten as follows:

where
In step i, 1 ≤ i ≤ n – 1. Following the design procedures similar to the first and second steps, it is possible to obtain:

In (18), the virtual controller
Note that Vi–1 can be designed in the i – 1 step by the recursive method. Taking the time-derivative of Vi by considering Vi–1 in step i and (18), we can get:

Choose the virtual controller α(i+1)j as:

where cij is the design parameter, and satisfy cij > 0. Substituting (21) into ̇i, we obtain:

where
In the last step, since the parameter is θj unknown, the parameter adaptive law should be designed as well. Differentiating
where
It is worth noting that in (23) the actual control input uj is finally explicitly included, so uj not only causes all the ranks of the multiple high-order nonlinear systems to reach consensus but also deals with parameter uncertainties by using the Lyapunov stability analysis method.
We design the actual controller uj from (23) such that

Taking the time-derivative of Vn with respect to (22) and (23), we obtain:

We choose the adaptation law:

where Γ j is a positive definite matrix. Note that znj only contains the local information. In addition, the distributed control law is:

where cnj is the design parameter satisfying cnj > 0. Note that uj is designed relying on all the values of αij, where 1 ≤ i ≤ n.
Using (26) and (27) for (25), we can derive:

Based on the above recursive backstepping analysis, we can obtain the following theorem.

The disturbances can be rejected by adding a robust compensation term

εj > 0 denotes the boundary layers. Notice that when the saturation functions are used, the system errors can only be guaranteed to converge to the bounded layers with corresponding small tracking errors rather than zero, but the practical advantages may be significant.
4. Simulation
In this section, some simulation experiments are presented to verify the theoretical analysis. In order to show the advantage of the proposed control law over those in the existing literature (in which only multiple three-order nonlinear systems with a chained form are commonly applied for simulations), in this paper, multiple uncertain nonlinear systems with four-orders are applied. The models of the systems are defined by:

where 1 ≤ j ≤ 11 and θj are unknown parameters.
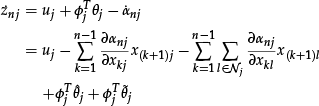
Consider an 11-node undirected graph as described in Figure 1. According to the communication network G, each individual agent can only exchange information with its neighbouring agents. In this case, the unknown parameters are assumed to be
Communication network G of the multi-agent system
In this simulation example, as shown in Figure 1, agents four and six are the key nodes in the communication network, both of which have four neighbouring agents. Therefore, the two agents' states (as can be seen by the green and pink lines in Figure 2 to Figure 5) and the control laws (the green and pink lines in Figure 6 to Figure 7) change more dramatically than the other nodes. Figures 2–5 show the evolution of the states. Clearly, the position states of all 11 agents ultimately reach consensus. It can be seen from Figure 6 that the control input uj of each system converges to zero as the consensus is achieved. Figure 7 shows the estimation of the unknown parameters θj, 1 ≤ j ≤ 11 by the adaptive law in (31) and the values of them converge to [2.5542, 2.4561, 2.7336, 0.9250, 7.5837, 6.3846, 0.6568, 0.6104, 0.2174, 1.1779, 1.2443] T . We proved the boundedness of the estimates and have illustrated the efficiency of the adaptation law in the simulation, which can be seen from Figure 7. The first-order states converge to the average of their initial values, while all the other states converge to zero.
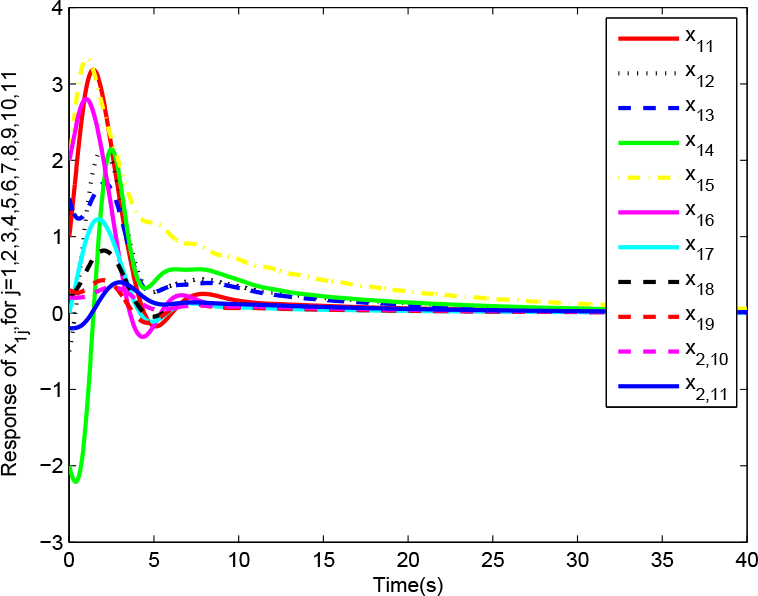
Response of x1j for 1 ≤ j ≤ 11

Response of x2j for 1 ≤ j ≤ 11
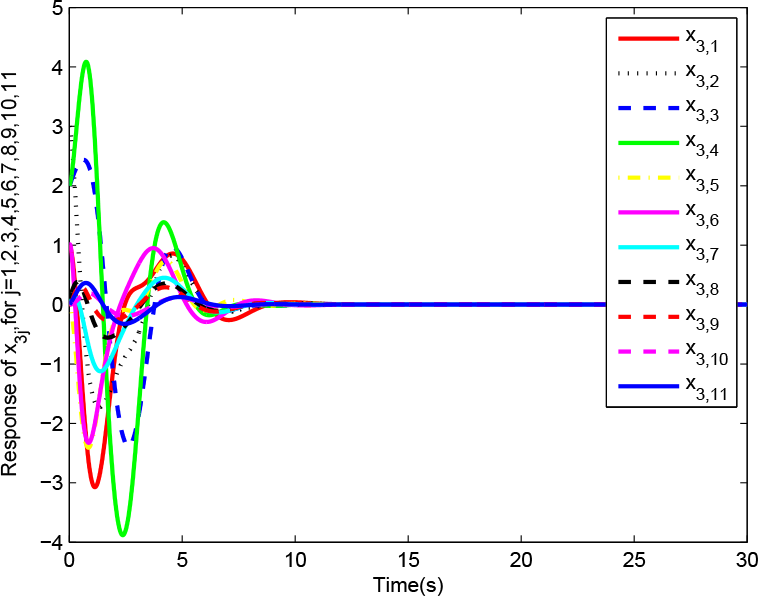
Response of x3j for 1 ≤ j ≤ 11

Response of x4j for 1 ≤ j ≤ 11

Response of uj for 1 ≤ j ≤ 11
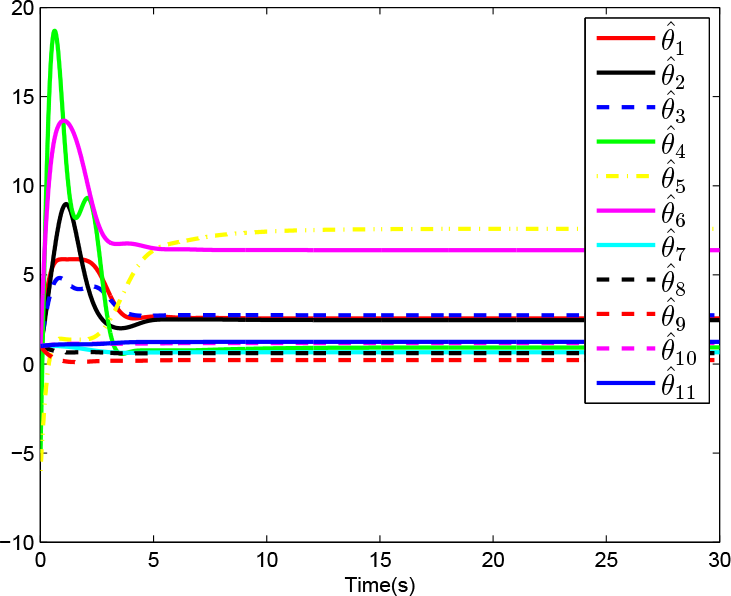
Response of
A linear network (as shown in Figure 8) is the one which induces the slowest response, because the information needs to propagate from one side of the network to the other. In this case, the simulation (as shown in Figure 9) can also verify the same result. It can be seen that the control objective (4) holds. Therefore, the distributed consensus control laws in Theorem 1 are effective.

A linear communication network for the multi-agent system

Response of x1j for 1 ≤ j ≤ 4, according to Figure 8
5. Conclusion
This paper discussed the consensus control problem of a type of multiple high-order nonlinear system with uncertainties. We proposed a distributed backstepping design method that interlaces the elaborate design of a suite of Lyapunov functions with the design of virtual feedback control. The controller design problem for the high-order multiple systems was broken into a sequence of design problems for lower-order subsystems. More specifically, a distributed consensus control approach under a fixed and undirected communication graph was devised and distributed backstepping techniques were utilized to construct the virtual intermediate control functions. Finally, simulations with multiple four-order uncertain nonlinear systems were provided to show consistency with the theoretical results. The design techniques herein can be applied to a wide class of multiple high-order nonlinear systems with uncertainties. Since time-varying and a switching communication topology are commonly applied in the real-world, research into these problems would be very interesting and meaningful. Further work includes extending the result to cases when there exist communication delays between systems, where the states are not available and when the high-order nonlinear system has uncertainties at each step.
Footnotes
6. Acknowledgements
This work was supported in part by the National Natural Science Foundation of China under Grants 61321002, 61120106010 and 61175112, the programme for New Century Excellent Talents in University and the Beijing Education Committee Cooperation Building Foundation Project. The authors would like to thank the Associate Editor and reviewers for the valuable comments and suggestions that improved the original manuscript.