
Abstract
Open-frame is one of the major types of structures of Remote Operated Vehicles (ROV) because it is easy to place sensors and operations equipment onboard. Firstly, this paper designed a petri-based recurrent neural network (PRFNN) to improve the robustness with response to nonlinear characteristics and strong disturbance of an open-frame underwater vehicle. A threshold has been set in the third layer to reduce the amount of calculations and regulate the training process. The whole network convergence is guaranteed with the selection of learning rate parameters. Secondly, a fault tolerance control (FTC) scheme is established with the optimal allocation of thrust. Infinity-norm optimization has been combined with 2-norm optimization to construct a bi-criteria primal-dual neural network FTC scheme. In the experiments and simulation, PRFNN outperformed fuzzy neural networks in motion control, while bi-criteria optimization outperformed 2-norm optimization in FTC, which demonstrates that the FTC controller can improve computational efficiency, reduce control errors, and implement fault tolerable thrust allocation.
Keywords
1. Introduction
As a cost-effective solution for performing complex tasks in an underwater environment, underwater vehicles are attracting significant interest. However, the problem of controlling them is particularly challenging, since they are expected to operate in uncertain underwater environments. In such a context, fault tolerable control (FTC) is crucial for overcoming the possible occurrence of faults in the vehicle's thrusters [1].
Currently, there are two major approaches of FTC for underwater vehicles, namely passive FTC and active FTC [2]. The passive approach relies mainly on systematic reliability and adaptability without fault detection [3,4]. The active approach either applies a compensation method on the basis of fault detection results or reconstructs a new control law [5]. For ROV manoeuvrability in complicated environments, thrusters are usually redundantly arranged. These are operated under an effective control scheme or by hand manipulation at the beginning. Once the thruster fault has been detected, a novel switching approach or a tuning methodology will be applied.
Podder, K. et al. exploited the excess number of thrusters for propulsion force distribution to accommodate thruster faults [6]. Daqi Z. et al. used a neural network to accommodate faults and perform an appropriate control reallocation on the basis of the on-line fault identification [7]. However, they only took the total fault of the thruster into consideration, which was different from the actual fault situation of the thrusters.
On the other hand, based on self-organizing maps [8], the fault accommodation subsystem of reference [9] used a weighted pseudo inverse system to find a 2-norm optimal solution to the control allocation problem. The thruster fault is differentiated into jammed, heavy jammed and broken propellers. It is typically allowed to continue operating in the case of a partial fault [10]. However, a pseudo inverse solution may generate an unequal distribution of propulsion forces and cause a loss of manoeuvrability because it does not necessarily minimize the magnitudes of the individual thrusts [11,12]. Though infinity-norm optimization enables a better direct monitoring and control of the magnitude for thrust minimization [12], it may encounter a discontinuity problem because of the non-uniqueness of such a solution and the separation of two successive solution-sets [13].
For the automatic control of ROV motions, different approaches have been applied in the existing literature, for example, H∞ control [14], adaptive control [15], sliding mode control [16] and neural network control [17]. Because neural networks can approximate linear or nonlinear mapping through learning, they have been widely used in the study of underwater robot motion controllers to compensate for the effects of nonlinearities and system uncertainties [17–21]. Furthermore, fuzzy neural networks (FNN) have been employed for ROV due to their possibility of expressing human experience in an algorithmic manner [22–25]. However, it is very difficult for the forward neural network to reflect the time series influence between system input and output variables, the weights of the neural network would take a long time to converge, especially when the underwater vehicle operates under disturbances or the target trajectory undergoes an abrupt change. This will lead to a poor transition process and even uncontrolled output [26,27]. Recently, the recurrent fuzzy neural network (RFNN) has been extensively presented since it is superior in its dynamic response and information storing [28–30]. However, RFNN has a low learning efficiency, which makes it very difficult to meet the high-precision trajectory tracking control of underwater robots [27]. As a powerful tool for modelling analysis, control and optimization, petri-net can select and train the most effective weight to improve its training and control efficiency when combined with FNN control [31].
This paper will construct a petri-based RFNN (PRFNN) controller for the motion control of open-frame underwater vehicles to improve computational efficiency, and combine infinity-norm optimization with 2-norm optimization in a primal-dual neural network to implement fault tolerance (bi-criteria FTC) in thrust allocation.
2. Design of PRFNN controller
2.1 Model of an Open-frame Underwater Vehicle
If we establish an absolute reference frame E - ξηζ and relative reference frame G-xyz (Figure 1) and neglect roll, a 5-DOF motion model can be obtained as:



ROV Coordinate system
2.2 PRFNN Controller
The PRFNN Controller is the 5-layer block diagram of the petri-net based RFNN (Figure 2) designed to handle the control and trajectory tracking problems for open frame underwater vehicles. It includes an input layer, a membership layer, a petri layer, a rule layer and an output layer. The feedback connection is implemented using recurrent feedback at the membership layer. The propagation function in each layer is issued as follows.
The first layer is the input layer. Its output node is expressed as:
The second layer is the membership layer. Each node in this layer acts as a membership function. The input of this layer is expressed as:
The third layer is the petri layer, the purpose of which is to produce a threshold by using competition laws to determine the training requirements:
The fourth layer is the rule layer, which multiplies the input variables to produce the output:




PRFNN controller for open frame underwater vehicle
2.3. Strategy for Online Learning
The core of the learning strategy is to recursively obtain a gradient vector so that each element can be defined as the derivative of an energy function. The strategy is generally referred to as the back propagation learning rule, because the gradient vector is calculated in direction opposition to the flow of the output of each node. Firstly, we define the energy function E as:


In the output layer, the error term to be propagated is:






2.4. Analysis for Convergence
The values selected for the learning-rate parameters have significant effects on the network's performance. In the following section, the learning-rate parameters will be analysed in relation to the convergence of the network.
The discrete-type of (8) is:

3. Fault Tolerable Thrust Allocation
3.1 Model of Thrust Control Allocation
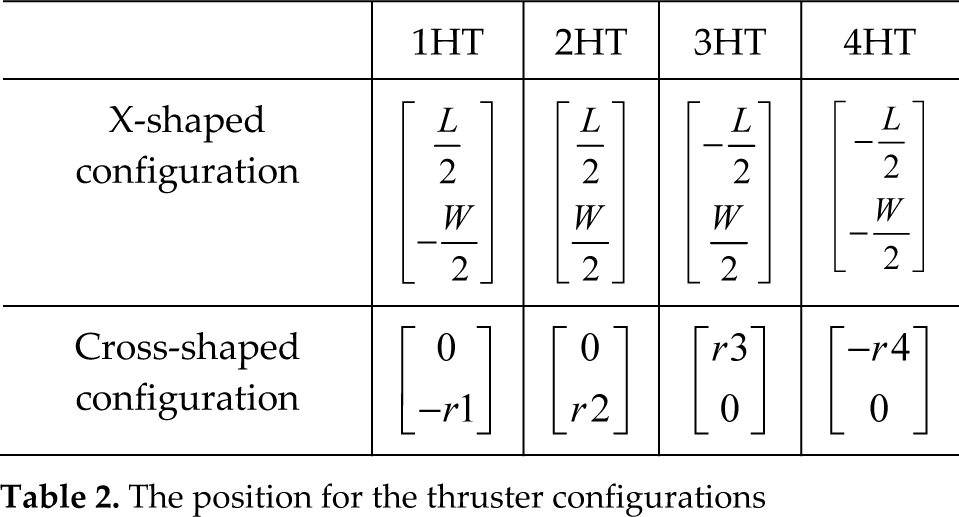
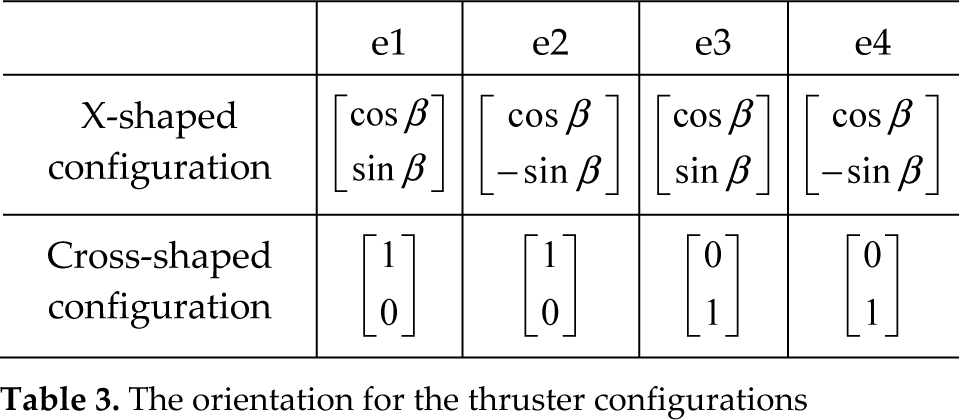
ROV can enable diving with only one thruster in the vertical direction, if enough load is available. Therefore, we focus our research on fault tolerable thrust allocation in the horizontal plane. Usually, an open frame underwater vehicle has four horizontal thrusters, denoted iHT, i=1,2…4. There are two common configurations of the horizontal thrusters, e.g., X-shaped and Cross-shaped configurations (Figure 3) [10]. Their position and orientation are illustrated in Table 2 and Table 3.
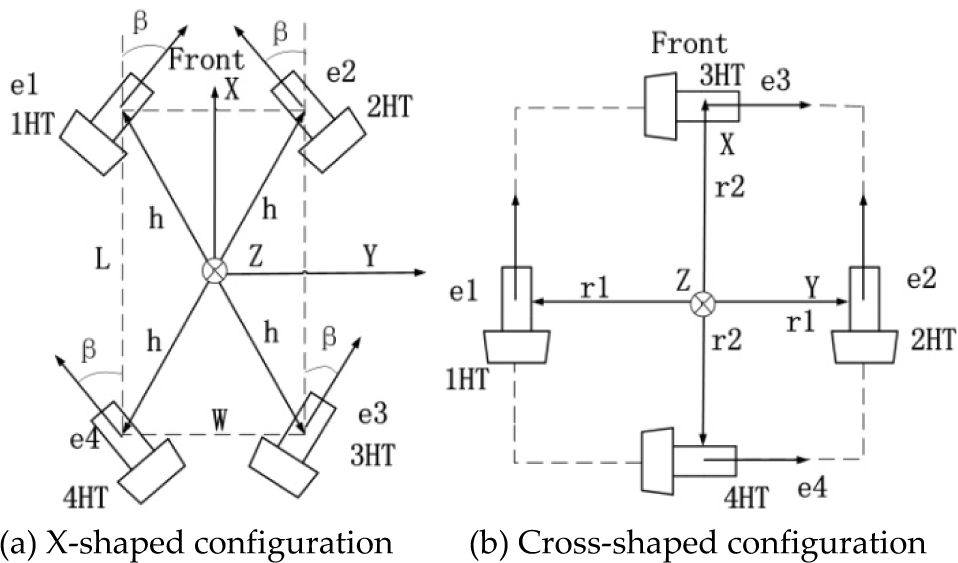
Two configurations of the horizontal thrusters
Values of learning rate parameters

The position for the thruster configurations
The orientation for the thruster configurations
Therefore, the vectors of forces and moments, exerted by HT, can be expressed as:


3.2 Fault Tolerant Scheme for the Allocation of Thrusters
There are two faulty situations for thrusters: partial fault and total fault. Given this, we use a weighting matrix W=diag(W1 W2 … W4) to describe the thrusters' situations. The diagonal elements of the weighting matrix demands that the thrust cannot exceed the available capacity of the faulty thrusters:
When 0 < a < 1, the objective function (18) is strictly convex due to the positive definition of Q. Provided that the feasible region of linear constraints (19–21) is a closed convex set, the constrained optimal solution to the optimal program (17) is unique [32]. In light of its uniqueness, the continuity of the solution could thus be guaranteed [13,33]. When a = 1, the proposed scheme is reduced to the standard 2-norm scheme. The uniqueness and continuity of such schemes are both guaranteed. When a = 0, the proposed scheme is reduced to the standard infinity-norm scheme. According to [13], the infinity-norm scheme may have non-unique solutions at successive time instants, which may result in a discontinuity phenomenon. So, we set 0 < a ≤ 1 to remedy such a discontinuity problem.





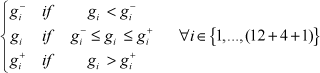
If we define u ∈ ℝ4, corresponding to the equality constraints of (19), v ∈ ℝ8, corresponding to the inequality constraints of (20), the primal-dual decision variable vector, g and its bounds g±, could be constituted as:

Theorem 1
There exists at least one optimal solution, 
Proof
It follows from [31] that the dual problem of (18)–(21) can be derived as:








If we define χ* = χ-* - χ+*, the dual feasibility constraint (25) will be transformed into


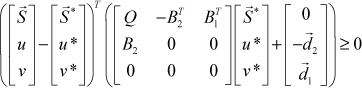


Expression (36) can be further written as:

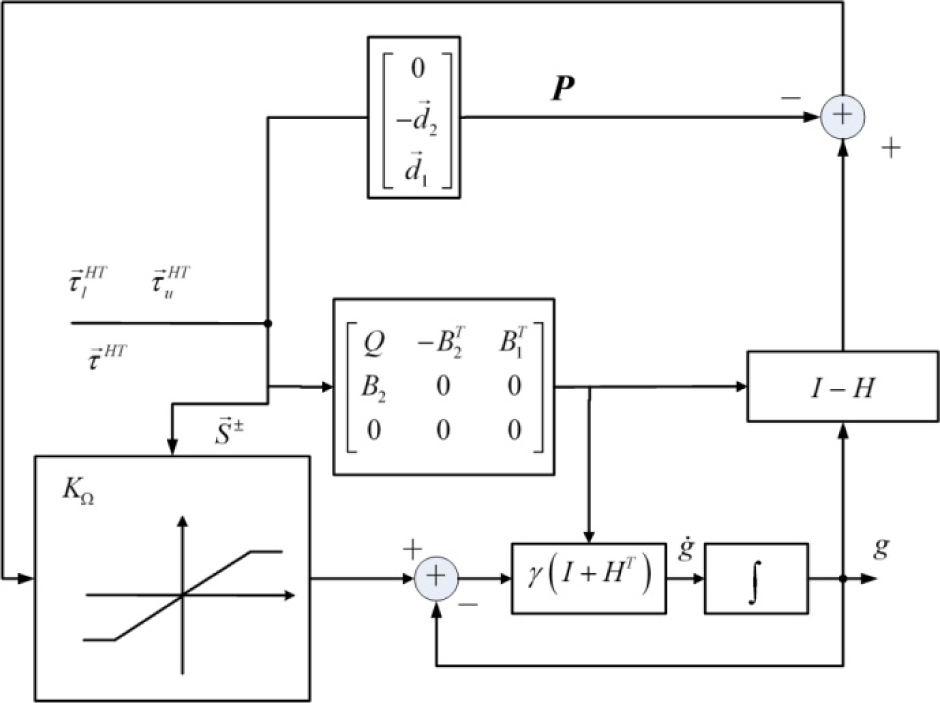

Network architecture of (37)
Theorem 2
With the existence of at least one optimal solution S to (18)–(21), starting from any initial state g(0) ∈ ℝ12+4+1, the state vector g(t) of (13) converges to an equilibrium point g*, of which the first (4+1) elements constitute the optimal solution
Proof
First, it follows from the projection inequality:






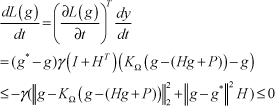
For the exponential convergence, if ρ > 0, then 
4. Simulation and Experimental Results
In order to verify and analyse the FTC scheme of this paper, experiments and a simulation were performed on a SY-II Open-frame underwater vehicle. The control commands are sent through network communication between a surface computer and a PC/104 embedded system. SY-II is equipped with a depth gauge, a magnetic compass, six thrusters, including two main thrusters, two side thrusters and two vertical thrusters. The horizontal thrusters are cross configuration (Figure 2(b)). The hydrodynamic and inertial parameters are illustrated in Table 4 and Table 5. Experiments have been conducted in a 50×30×10 meter tank at the Key Laboratory of Science and Technology on Underwater Vehicles, Harbin Engineering University.
SY-II inertial parameters

SY-II Hydrodynamic parameters

In these depth and heading control experiments, shown in Figure 6 and 7, we performed comparisons between the PRFNN and FNN control. The learning-rate parameter is obtained through tank experiments: μ m = 167.5, μδ = 0.15, μθ = 97.7, μ w = 14.8. The depth control results and a comparison of Figure 6 and 7 illustrate that the PRFNN controller has a higher convergence speed and fewer errors than FNN. Operating the heading control of SY-II is much harder because of the length-width ratio of the open-frame of the underwater vehicle and its strong non-linear and random disturbance from the tether. In the heading control experiments of Figure 7, we compared the systems in four situations: (1) PRFNN controller of section 2 without thrusters fault; (2) PRFNN controller with bi-criteria FTC (a = 0.5, γ = 105, where a has been selected from heading control simulations and experiments, for the two criteria of convergence speed and control errors, γ should be set as large as possible to allow for computer simulations, the left main thruster (1HT in Figure 3.(b)) 70% fault and tail side thruster (4HT in Figure 3.(b)) 100% fault); (3) PRFNN controller with 2-norm FTC (a = 1, γ = 105; the left main thruster (1HT in Figure 3.(b)) 70% fault and tail side thruster (4HT in Figure 3.(b)) 100% fault), which is similar to a pseudo inverse solution in [11] and [12]; (4) FNN controller without any faulty thrusters. At the beginning of the heading control experiments, the acceleration for the heading control is great, and fluctuation results from the counter force of the tether and the self inertia. From the heading control results, RFNN works better in a nonlinear system dynamic response setting and the petri-net alleviated training inefficiency. Thus, the PRFNN controller exhibited a faster convergence speed in comparison with the FNN controller because it incorporated a petri-net into a conventional recurrent FNN framework. Thrusts are better optimized for allocation when faults have been detected. When an infinity-norm optimal solution is introduced through weighting factor a, the FTC is transformed into a bi-criteria FTC scheme. The bi-criteria FTC scheme behaves with better convergence results in comparison with the 2-norm FTC scheme during the heading control experiments, because infinity-norm optimization enables a better thrust magnitude optimization and a self continuity solution.

Comparisons of depth control experiments

Heading control experiments of fault tolerant optimal allocation of thrusters
Cruising simulations and experiments have been carried out with the precondition that the left main thruster (1HT in Figure 3.(b)) has 40% fault and the tail side thruster (4HT in Figure 3.(b)) has 100% fault. In the cruising simulation under or without a current effect (eastward 0.2m/s) in Figure 8 (a) and (b), the desired motion trajectory is (0,0)-(70,200)-(0,300)-(120,300)-(120,200)-(0,0). Furthermore, cruising experiments have been conducted for a SY-II equipped with an Ultrosonic Doppler Velocity Meter in Figure 6 (a) and 8 (c), the desired motion trajectory is (-7,-20)-(-2,-2)-(5,-2)-(5,-22)-(-7,-20). From Figure (8), the bi-criteria FTC outperforms the 2-norm FTC for fault tolerance control in reducing overshoot during yawing, approaching the desired trajectory and cruising against the current.
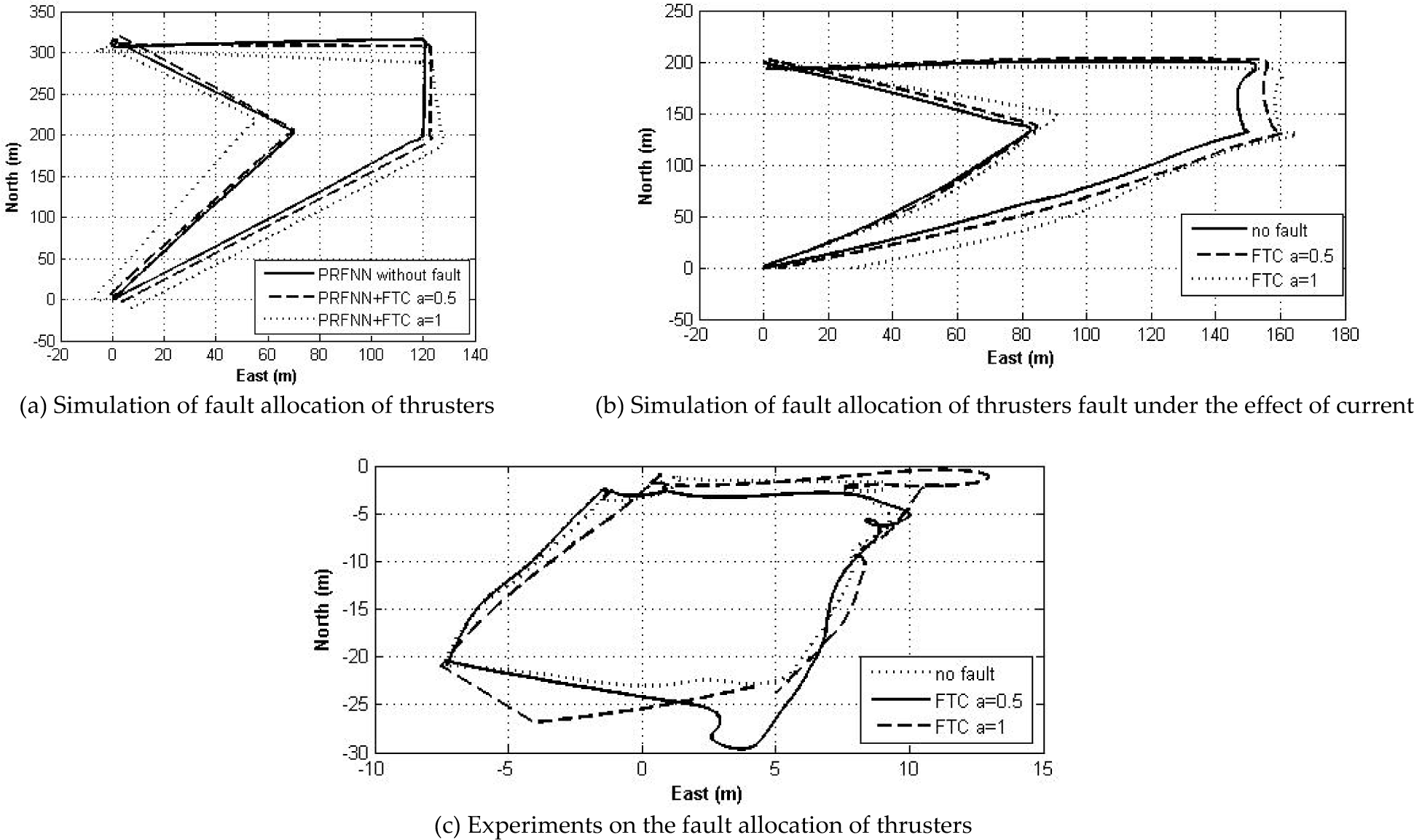
Cruising experiments and simulation of fault tolerant optimal allocation of thrusters
5. Conclusions
The main contributions of this paper are 2 twofold:
Firstly, a PRFNN controller was designed. We have incorporated a petri-net into a conventional recurrent FNN framework in the third layer. A threshold was used in this layer to regulate training and learning, according to controller errors. The computational inefficiency was reduced and a faster convergence speed was obtained by using a petri-net layer. Thus, the amount of calculations performed by the whole network was reduced. Moreover, an online training algorithm was developed based on a gradient descent method. The selection of learning rate parameters guaranteed the whole network convergence.
Secondly, a bi-criteria neural network optimization scheme was presented to implement fault tolerable control for thrusters. When thruster faults are detected, the proposed bi-criteria neural network optimization scheme combines the 2-norm optimization scheme and the infinity-norm optimization scheme via a weighting factor. The fault and saturation limit of the thrusters are considered at the same time. A primal-dual neural network, based on linear variation inequalities, is developed to implement the optimal allocation of thrust.
Experiments and simulations have further demonstrated the performance, characteristics and efficacy of the proposed PRFNN, with a bi-criteria neural network optimization fault tolerable control scheme.
Footnotes
6. Acknowledgements
This project is supported by the National Science Foundation of China (No.51209050, 51179035, 51279221 and 61100006), the Doctoral Fund of the Ministry of Education for Young Scholars (20122304120003), the pre-research fund of state key of science and technology of underwater vehicle (9140C270306130C27102), the State Key Laboratory of Robotics and Systems (Harbin Institute of Technology) (No. SKLRS-2012- ZD-03).