
Abstract
The 2-Dimensional Translational Oscillators with Rotating Actuator (2DTORA) is a novel underactuated system which has one actuated rotor and two unactuated translational carts. This paper focuses on dynamical modelling and simulation analysis of the underactuated 2DTORA on a slope. Based on Lagrange equations, the dynamics of the 2DTORA is achieved by selecting a transverse position of a cart, a travelling position of a cart, and the rotor angle as the general coordinates and torque acting on the rotor as the general force. When the slope angle is set to zero, the dynamics of 2DTORA on a slope is reduced to that of 2DTORA on the horizontal plane. Moreover, by eliminating one degree of translational cart motion, the dynamics of 2DTORA is reduced to that of TORA which is a benchmark of underactuated systems. In addition, the equilibrium and controllability of the 2DTORA system on a slop are discussed. Finally, numerical simulations are performed to verify the feasibility of the developed dynamic models.
Introduction
Underactuated systems are a class of mechanical systems whose control inputs are less than the number of configuration variables. Because underactuated systems need less control inputs than the fully-actuated systems, they have advantages in saving energy, reducing the cost, and enhancing the flexibility of the system [1, 2]. In recent years, there has been an increasing interest among researchers with regard to underactuated systems due to their broad applications. Many benchmarks of underactuated systems have also emerged to validate various nonlinear control design techniques, such as Pendubot, Acrobot, inverted pendulum, Furuta Pendulum, TORA, VTOL (Vertical Take-Off and Landing) aircraft, etc. [3–5].
The TORA or RTAC (Rotational-Translational ACtuator) system consists of a translational oscillation cart and an eccentric rotor attached to the cart. The system was originally studied as a simplified model of a dual-spin spacecraft to investigate the resonance capture phenomenon [6]. At that point it was considered to be a benchmark problem for nonlinear control [7]. For the system, both the translational position of the cart and the rotation angle of the rotor needed to be controlled. Since only the rotating angle is actuated, the TORA system is an underactuated system. Consequently, the system cannot be globally feedback linearized and the direct application of well-known nonlinear control schemes, such as feedback linearization, cannot guarantee its global stabilization. Jankovic et al. [8] proposed cascade-based control designs for the TORA system. Petres et al. [9] employed TORA to study the approximation and complexity trade-off capabilities of the tensor product distributed compensation-based control design. Bupp et al. [10] designed one integrator backstepping controller and three passive nonlinear controllers, and implemented them on an experimental testbed of TORA. Lee et al. [13] proposed an adaptive backstepping control scheme based on a wavelet-based neural network for the TORA system, and a compensated controller was provided to enhance the control performance. Avis et al. [11] presented an energy-based and entropy-based hybrid control framework for stabilization of the RTAC system, and compared the two controllers' performances through experiments. In [12], an equivalent-input-disturbance approach was developed to stabilize the TORA system with two steps. Moreover, stabilizing controllers with only rotor angle feedback were designed for the TORA system [14–16]. Most of above results were based on simulations; however, the approaches in [10, 11, 13] were validated by experimental results.
Based on TORA, a novel 2-dimensional TORA (2DTORA) was proposed in [17]. The 2DTORA is an underactuated mechanical system that has one actuated rotor and two perpendicular translational oscillation carts instead of one. Compared with TORA, 2DTORA has one more configuration variable to be controlled while only the rotating angle of the rotor is actuated. Therefore, it is more difficult to design its stabilization controllers. To date there have been few studies focusing on the control of the 2DTORA system. In [17, 18], the dynamics, controllability, stability, and passivity of the 2DTORA system on a horizontal plane were studied and a PD controller based on passivity was designed to stabilize the system. According to the design techniques presented in [19], a Euler-Lagrange controller based on passivity of underactuated systems was designed to stabilize the 2DTORA system with only rotor angle feedback in [20].
Successful stabilizing control of the 2DTORA system demonstrates the possibility of controlling two perpendicular oscillations with one actuated rotation motion. This is an important inherent characteristic of the underactuated 2DTROA system which has potential applications to the active anti-vibration control of high buildings. It is well known that active anti-vibration control has better performance over passive anti-vibration control for the stability of building structures [21]. One of the disadvantages of active anti-vibration control for buildings is the cost since a full-actuation or a even redundant-actuation control system is needed [22]. However, based on the characteristic of the underactuated 2DTORA system, only one actuation is needed to control two perpendicular vibrations. Therefore, the idea of controlling the underactuated 2DTORA system could be applied to active anti-vibration control of building structures with a low cost.
However, there are no perfect horizontal planes in real applications. In other words, the motions of the 2DTORA system will be on a slope. In this paper, the 2DTORA system on a horizontal plane will be extended to the system on a slope. Dynamical modelling and equilibriums with controllability will be analysed in detail.
The rest of paper is organized as follows. In section 2, the dynamics of the 2DTORA is developed based on Lagrange equations. Next, the equilibriums and their controllability conditions are analysed in section 3. In section 4, simulation studies on the dynamics and controllability analysis are presented. Finally, conclusions are presented in the last section.
Dynamical Modelling
The 2DTORA system on the slope is depicted in Figure 1. The parameters of the system are defined as is the 2DTORA system on the horizontal plane in [17]. The outer oscillation cart of mass My is connected to a fixed wall by a linear spring of stiffness ky; the inner cart of mass Mx is connected onto a wall of the outer cart by a linear spring of stiffness kx. The outer cart and inner cart are constrained to have 1-dimensional translational motion with y and x denoting the travel distance respectively, and the two translational motions of the carts are perpendicular to each other. The actuated rotor attached to the inner cart has mass m and moment of inertia I about its centre of mass, which is located a distance r from the point about which the rotor rotates. In Figure 1, τ denotes the control torque applied to the rotor. Let x,

2DTORA system on a slop
Since the system in Figure 1 is a multi-body dynamical system, Lagrange equations are employed to derive its dynamics. The general form of the Lagrange equations is

where L is the Lagrangian of the particle system; qk is the general coordinate; k is number of the degree of freedom; Qk denotes the general force. Dynamical modelling of the 2DTORA system will be processed by selecting x, y, θ as the general coordinates and τ as the general force.
The Lagrangian L is L = T − P, where T and P are the kinetic energy and potential energy of the system, respectively. The total kinetic energy T is a sum of kinetic energy Tx corresponding to the equivalent mass of Mx, kinetic energy Ty corresponding to the equivalent mass of My, and kinetic energy Tm of the rotor Km. Therefore,

Let zero potential energy of the gravity be the centre of the carts when the springs are at free status. According to Figure 1, the arbitrary positions of the three mass points on the slope can be depicted as in Figure 2. The total potential energy is the sum of the energy saved in the two springs Ps and gravity energy Pg:

where |·| denotes the length of the line segment.

Mass points analysis of the 2DTORA system on a slope
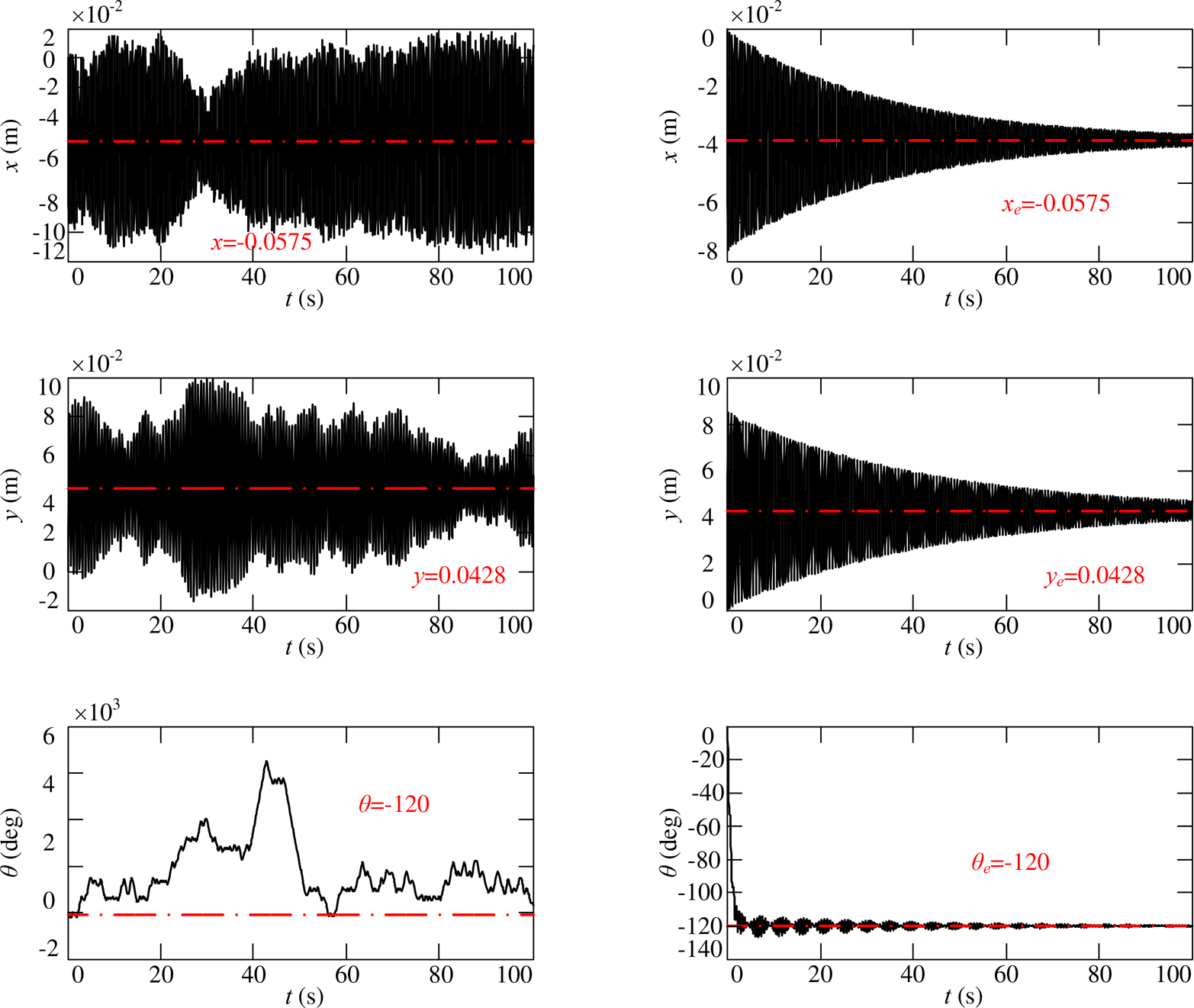
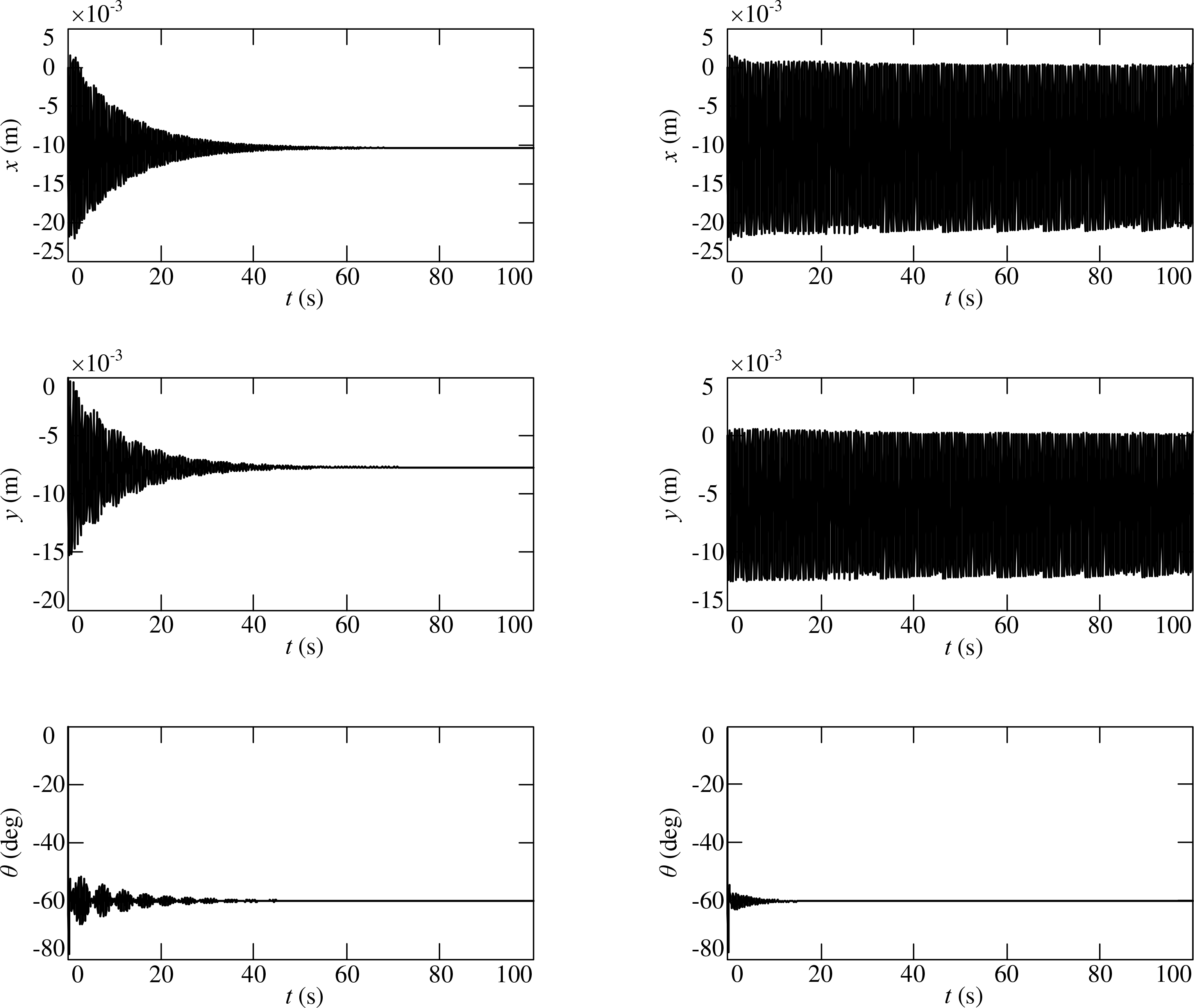
Simulation results on dynamics with zero input and zero initial states: slope parameter γ = 30°, β = 60°; (left column) no friction, (right column) k fx = k fy = 0.05, k fr = 0.03
Based on the selection of general coordinates and general force, the Lagrange equations of motion for the 2DTORA system on a slope are


where Fx and Fy are the translational disturbance forces applied to the moving carts, and Fr is the disturbance torque applied to the rotor.
After some calculations, the dynamics of the 2DTORA system on a slope is

Let

where

There are some general properties of these matrices. Note that

Therefore,

which is a skew-symmetric matrix. This constitutes an important property

which can be used for establishing the passivity of the system. The potential energy of the system P is related to

To establish the passivity of the system, we neglect the disturbance force matrix
The total energy of the system is given by

Differentiating E, based on (9) and (12) we obtain

Integrating both sides of the above equation we get

Therefore, the system having τ as input and



which is the dynamics derived for the 2DTORA system on a horizontal plane developed in [17]. Moreover, if we remove one of the translational motions from the above dynamics, it is easy to get the dynamics of the TORA. As we remove the motion in y axis, the dynamics becomes as it is in the TORA system used in [7]


which is a benchmark nonlinear system.
Defining

where u = τ. Let

we have

where

To get the equilibriums of the system, let u = 0 and f(



Substituting (27) into (25) and (26), we have

where

Because the parameters kx, ky, a1, a2, a0, g are all positive, we have the equilibriums of the cart positions

Substituting the equilibriums of the cart positions into (27), we have

Because the parameters a1, a2, b, g are all positive, we have the equilibriums of the rotor angle

where θ e is an arbitrary angle.
Combining the equilibriums of the cart positions and rotor angle, the equilibriums of the 2DTORA system on a slope are

where k = 0, ± 1, ±2, ···.


It is straightforward that the system has smallest potential energy of gravity at the stable equilibriums.
Once the equilibriums of the 2DTORA system are obtained, one wants to know if all the equilibriums in Eq. (34) are controllable or controllable under what condition.
We know that the system in Eq. (22) is controllable or reachable about its equilibriums if the following condition is fulfilled:

which corresponds to the full rank condition for the following matrix

where

The matrices

where

Based on the property on determinant of a matrix, we have

Therefore, the condition of full rank of the matrix

The conditions when the above equation equals to zero need to be discussed.

where a0, a1, a2, b, k
x
, k
y
, det(


which lead to


Condition (45) shows that when the rotor angles are aligned to the oscillation directions of the carts, the system is uncontrollable. Condition (46) shows that when the oscillation periods of the two directions of the cart-spring system are the same, the system is uncontrollable.

where a1, a2, b, k
x
, k
y
, det(

Therefore, for the stable equilibriums of the 2DTORA system on a slope, the controllable equilibriums and their controllable conditions are



Based on the relationship between θ and γ, for the stable equilibriums of the 2DTORA system on a slope, conditions (48) and (49) are the same. For condition (50), it can be rewritten as

One can see that the condition (50) is a constrain of nine physical parameters M x , M y , m, r, I, k y , γ, β, g. This condition does not like conditions (48) and (49). For condition (48), people may want to stabilize the rotor angle to these special angles; and for condition (49), some symmetrical plants could have the same oscillation periods in x and y direction. However, condition (50) could never happen in practice. In other words, condition (50) can always be taken as fulfilled in reality.

where a′0, a1, a2, b, k
x
, k
y
, det(

Therefore, for the unstable equilibriums of the 2DTORA system on a slope, the controllable equilibriums and their controllable conditions are


Comparing the above conditions for the unstable equilibriums of the 2DTORA system on a slope with the stable ones (48), (49), and (50), they are similar. However, the unstable equilibriums are not focused upon in most research, especially for applications in the active anti-vibration control of buildings.
As a conclusion, for the 2DTORA system on a horizontal plane or slope, the controllable equilibriums and their main controllable conditions are: (1) the rotor angle cannot be set to the directions aligned to the oscillation directions of the carts as formulated by (45) or (48); (2) the oscillation periods of the two directions of the cart-spring system cannot be the same.
This section validates the dynamics and analysis on the equilibriums and their controllability of the 2DTORA system on a slope through simulations based on Simulink™. In the following simulations, the physical parameters of the 2DTORA system are based on [7]: Mx=1.3608kg, My=2.7216kg, m=0.096kg, kx=186.3N/m, ky=279.5N/m, r=0.0592m, I=0.0002175kgm2, g=9.8 m/s2.
Firstly, simulation studies are performed to validate the equilibriums in Eq. (34) based on the system dynamics in Eq. (9). In the simulations, the initial state of the system is set to zero [x,
According to the left column of the simulation results in Figure 3, for the 2DTORA system on a slope without friction, carts oscillate along x-axis and y-axis and the oscillation centres are the equilibriums. Moreover, the oscillation amplitudes of x-axis and y-axis are complementary because the overall system energy is conservative. The curve of rotor angle θ varies without obvious feature, which is a combination of rounds of rotation and oscillation within a round based on its initial condition. From the right column of the simulation results in Figure 3, when the frictions are ejected into the system, the cart motion of x-axis and y-axis is damped oscillation with respect to their equilibriums x=−0.0575m, y=0.0428m. The rotor angle will stick to its equilibrium and oscillate around it until damped to θ = −120° under friction. Without control input, the simulation results show that: in the no friction case, the cart will oscillate around its equilibriums and rotor rotate without obvious features under a non-stable initial condition; in the friction case, the cart and rotor will damped oscillate to their equilibriums.
The second simulation studies were performed to validate the controllable equilibriums, i.e., that the rotor angle cannot be set to the oscillation directions of the carts. We arranged the slope parameters and initial rotor angle to guarantee that the initial rotor angle is with its stable equilibrium and aligned to the oscillation directions of x-axis and y-axis. The simulation results with disturbance forces that have constants as k fx = k fy = 0.05 and k fr = 0.03 are shown in Figure 4.

Simulation results on the dynamics with zero input and k
fx
= k
fy
= 0.05, k
fr
= 0.03: (left column) slope parameter γ = 0°, β = 60°, initial state [0, 0, 0, 0,
Simulation results on dynamics with zero initial states and no friction: slope parameter γ = −30°, β = 9°; (left column) θ e = −60°, (right column) θ e = −60° and (Mx + m)k y = M y + m)k x
The initial condition of the left column in Figure 4: slope parameters γ = 0°, β = 60°, initial state [x,
Finally, simulation studies are performed to validate the controllable condition of the equilibriums, i.e., the oscillation periods of the carts in two directions cannot be the same. To proceed with this simulation study, a controller for the system is needed. Based on the control design for the 2DTORA system on a horizontal plane in [18], a similar Lyapunov function for the 2DTORA system on a slope can be designed as

where k1, k2 are positive constant, and
are system energy and typical rotor angle θ ∊ (−π, π] at stable equilibriums. Since the smallest system energy is E0, the designed control Lyapunov function (55) is positive definite. Based on the passivity property (16), the stabilizing control input can be yielded similarly as in [18]

where k3, > 0.
The simulation results of the close-loop control system consisting of dynamics (9) without friction and controller (56) are shown in Figure 5. In the simulations, the parameters are set as: slope parameters γ = −30°, β = 9°, initial state [x,
This paper presents the dynamics and analysis of the equilibriums and their controllable conditions of the 2DTORA systems on slopes. It shows that: (1) stable equilibriums of the system are located at the equilibriums with the smallest potential energy of gravity; (2) the rotor angle cannot be set to the directions aligned to the oscillation directions of the carts; (3) the oscillation periods of the two directions of the cart-spring system cannot be the same. The simulation results based on Simulink™ have verified the correctness and feasibility of the developed dynamics and controllability analysis.
The dynamics of the 2DTORA system on slopes is an extension of the dynamics of the 2DTORA system on a horizontal plane. Straightforwardly, it can be reduced to the dynamics of the TORA system on a slop or eventually the TORA system on a horizontal plane which serves as a benchmark nonlinear system. Since the motions of the 2DTORA system cannot be on a perfect horizontal plane in practical applications with gravity, the developed dynamics and related analysis in this paper are more general.
Footnotes
6.
The first author would like to thank the financial support from the National Science Foundation of China (NSFC) under grant no. 11102039 and the Natural Science Foundation of Jiangsu Province under grant no. BK2011456.