
Abstract
This paper addresses the problem of stabilizing the dynamic model of a nonholonomic mobile robot. A discontinuous adaptive state feedback controller is derived to achieve global stability and convergence of the trajectories of the of the closed loop system in the presence of parameter modeling uncertainty. This task is achieved by a non smooth transformation in the original system followed by the derivation of a smooth time invariant control in the new coordinates. The stability and convergence analysis is built on Lyapunov stability theory.
1. Introduction
In the past few years, a considerable interest has motivated researchers in the analysis and control design of underactuated and nonholonomic systems. From a theoretical point of view, this interest was sparked by the fact that such system present challenges problem in control theory. At same time, these systems do arise in a number of very important practical applications in the area of robotic vehicle control, namely in land, marine and aerospace vehicles, for which the number of actuators is smaller than the number of degrees of freedom.
Wheeled mobile robots (WMRs) are increasingly present in industrial and service robotics, particularly when flexible motion capabilities are required on reasonably smooth ground and surfaces [1]. Several mobility configurations can be found in these applications. The most common are the tricycle and the car-like drive. Kinematics study of several configurations of WMRs can be found in [2].
Beside the relevance in industrial applications, the problem of autonomous motion planning and control of WMRs has attracted the interest of researchers in view of its theoretical challenges. In particular, these systems are typically examples of nonholonomic mechanical systems [3].
In the absence of workspace obstacles, the basic motion tasks assigned to a WMR may be reduced to moving between two postures and following a given trajectory. From a control viewpoint, the peculiar nature of nonholonomic kinematics makes the control problem easier than the first; in fact, it is known [4], that feedback stabilization at a given posture cannot be achieved via smooth time invariant control.
This indicates that the problem is really nonlinear; linear control is ineffective, even locally, and innovative design is required.
The trajectory tracking problem of WMRs was globally solved in [5] by using nonlinear feedback control, and independently in [6] and [7] through the use of dynamic feedback linearization. Recursive backstepping control schemes for chained forms of WMRs have been also addressed by several authors [8].
Despite the substantial research effort, some fundamental problems still remain open. In particular, all the control laws presented in the above mentioned papers are nonrobust against parameter uncertainties. In this paper, a new solution to the problem of regulating the dynamic of a nonholonomic wheeled robot of the WMR.
A simple discontinuous adaptive state feedback controller that yields global convergence of the closed loop system in the presence of parametric modeling uncertainty is derived. This is achieved by resorting to a polar representation of the kinematic model of the mobile robot in the original state space followed by the derivation of a smooth time invariant control law in the new coordinates.
2. Dynamic model of the WMR and Problem formulation
The WMR is a unicycle type as shown in Figure 1. It has two identical parallel rear wheels controlled by two independent actuators and a steering front wheel. It is assumed that the plane of each wheel is perpendicular to the ground and the contact between the wheels and the ground in non-slipping, i.e. the velocity of the center of mass of the robot is orthogonal to the rear wheels axis. By assuming this, a nonholonomic constraint on the motion of the mobile robot of the form

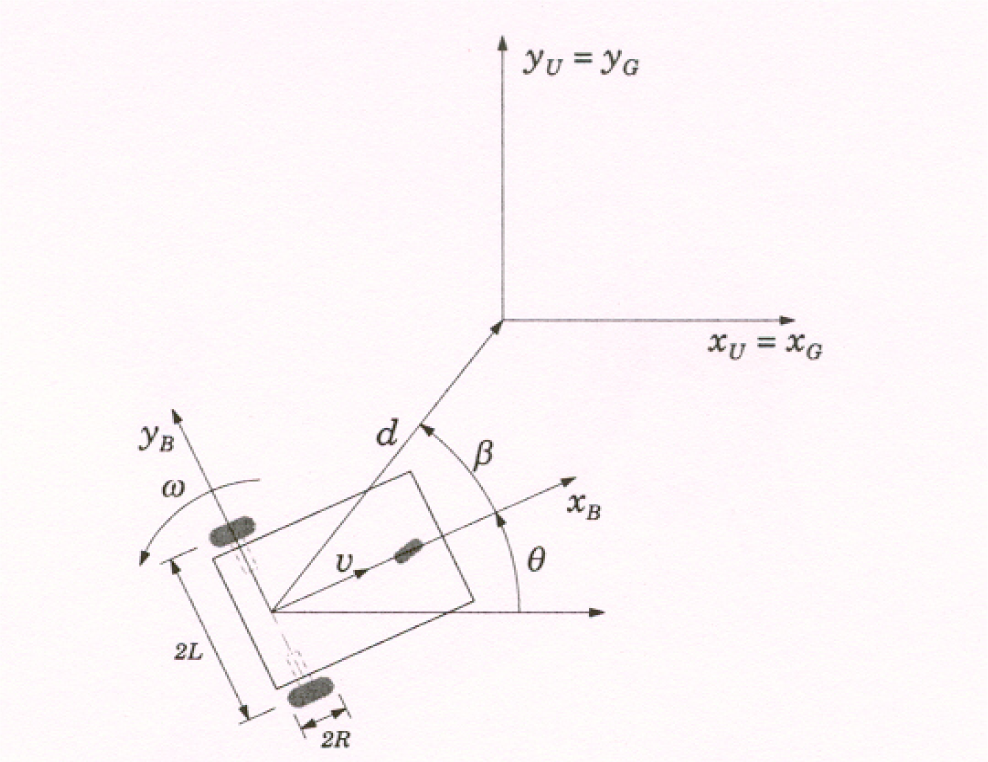
The WMR
It is also assumed that the masses of the wheels are negligible and that the center of mass of the mobile robot is located in the middle of the rear wheels axis. The torques developed by each actuator on the rear wheels are τ1,2 i=1,2.
The kinematics and dynamics of the mobile robot are modeled by the equations:



Polar Transformation
Consider the following coordinate transformation


Note that the coordinate transformation is valid only for non zero value of e. This will introduce a discontinuity in the control law that will be derived later and which will obviate the basic limitations imposed by Brockett.
3 Nonlinear Controller Design
Step 1: Define the variables



Differentiating (9) along the trajectories of (7), we obtain

Following the nomenclature in [8] and let w be a virtual control input and

Introduce the error variable


Step2: (Backstepping) The function V1 is now augmented with a quadratic term in z1 to obtain the new candidate Lyapunov function
The time derivative of V2 can be written as


Note that the terms

Then
which negative semi-definite.
Step 3: Distance regulation
Consider the distance subsystem (8) and define a new error variable z2 = ρ – k1 and the Lyapunov function candidate as

Differentiating V3 yields to

The last two terms of g are due to the fact that ρ in not constant, but ρ = k1 + z2 instead. They are computed by replacing ρ by k1 + z1 in the expression for V1 and propagating the corresponding terms down to V̇3. Choosing the control input as


Step 4: Parameter adaptation
Suppose that the values of the system parameters m, I, L, and R are not known precisely. Define the control inputs ui, i = 1, 2 as u1 = τ1 – τ2 and u2 = τ1 + τ2. From (3) and (4) the dynamic equations of the mobile robot become


The time derivative of V4 can be computed to give


Choose the adaptation laws as
Step 5: Switching control law
It has been assumed that the WMR will never start or reach the position x = y = 0 because of the non-definition of (6) at e = 0. To avoid this problem we introduce a switching control law. Define the following control law for e = 0 as

The complete control law is thus given by


4. Simulation Results
To illustrate the performance of the proposed control scheme, consider a WMR with the following parameters: m = 12kg, I = 1.5kgm2, L = 0.5m, R = 0.05m. The control parameters are chosen as k1 = 0.7, k2 = 0.1, k2 = 0.1, k4 = 0.7, γ1 = 0.1, γ2 = 6, kσ = 3,

Time responses of a: x(t), b:y(t) and c:θ(t)

Time evolution of parameter estimation a: ĉ1, b: ĉ2
5. Conclusions
This paper proposed a new adaptive control law for an example of uncertain nonholonomic systems, the wheeled mobile robot. A discontinuous time invariant nonlinear adaptive control was derived to yield convergence of the states of the system under parameter uncertainties. The Lyapunov theory was used to derive the control approach and simulation results were presented to illustrate the approach.