
Abstract
A survey of robotic competitions all over the world, their short history and present state is given. Contests are classified according to their difficulty and conditions. Typical competition categories, also with interesting robot constructions are described. Sense, advantages and disadvantages of contests are discussed, especially concerning educational purposes. At the same time, our experiences with organising the contest Istrobot are presented.
Introduction
The craving for competition and wishing to compare oneself with others is a vital drive of mankind. Of course, while writing about robot competitions, it is necessary to understand mainly the effort of their authors (usually humans), not robots, to compare results of their work and to judge who is the best.
According to the list of the robot competitions, maintained by R. Steven Rainwater (2004), there are dozens of events running each month all around the world.
As robotics has developed, also more complicated and sophisticated competitions have appeared. At the beginnings, the main task was just to construct a robot. Nowadays, massive data processing from sensors is required and very complex and sophisticated algorithms for robot decisions are involved.
Classification
Although the contest rules are very different, we can see some common features. The easiest categories use very strictly defined environment of the event – typically a maze. Also the conditions for all robots are the same, usually they perform actions separately, when everything is in perfect accordance with rules.
Another, more attractive category is performed in defined environment (playfield, arena), but the conditions are always different, mainly due to the unpredictable behaviour of the opponent robot.
And finally, the most difficult competitions are performed outdoors; when nobody exactly knows what conditions might be expected.
Navigational contests
The easiest but long-standing are navigational contests, which are organised in known, precisely defined environments. The task usually is to travel as fast as possible around a defined route. They vary from the easiest speed races to various line-, or wall-followers. Variation on line following is wall following together with searching for an optimal path in the maze (labyrinth). The typical contest is MicroMouse – a story of a mouse lost in a maze.
After a period of decline, we can now see a revival of navigational contests, with slight changes and some extra additions. Navigation also is the main task for different categories concerning mainly constructions – walking, flying, or diving. Usually they involve perfect coping with a specific movement but not with difficult missions. In a very popular climbing contest, the task always remains nearly the same except for an uncommon vertical position of the playfield.
The main characteristics of this group of contests are strictly defined environment and conditions.
Duels
As development of robots continues, more sophisticated competitions are appearing. The next step towards more attractive competitions (for public, but also in the sense of attractive challenges) was adding an unpredictable element to a known environment – an opponent's robot. The easiest example is MiniSumo, with a trivial task but plenty of possible strategies.
The next step is straightforward – add more robots. So we have sporty-inspired contests: volleyball, hockey and the very popular robosoccer.
Crusades
The logical results of the evolution of contests are competitions performed in an unknown area. They also put effort to be more than just contests, and try to help to develop really useful applications.
Well known are cleaning contests (window or vacuum cleaners), RoboRescue for searching victims of disaster, and Grand Challenge (an outdoor navigation contest). Another competition, near the border between the navigation and adaptation types, is a fire-fighting contest (Anon, 2004m).
Contests in a dynamic unknown environment are the most difficult, but they reflect real research interests and real-life requirements.
Miscellaneous
Before we start to describe details of partial categories, let us briefly mention some of them, which are not easily classified.

The animatronic robot Pepa (Szylar, 2004), winner of the Istrobot contest in the category Freestyle
At the author's university, during the Istrobot event, there is also a Freestyle category. During the five minutes, the contestant can show whatever his robot can do. There are no limitations except the safety rules. The most interesting robot, chosen by spectators' applause, wins.
In the following sections, we will take a closer look on typical representants of presented categories. For description of the navigational type of contests, we use an event organized by the author at his home university. Faculty of Electrical Engineering and Information Technology is today one of the most significant faculties of the Slovak University of Technology in Bratislava. Since the year 2000 we organize the robotics contest called Istrobot (a composition of Greek name of river Danube - Istros and the robot). Istrobot is an effort to draw widespread attention to technology issues associated with autonomous mobile robots in Slovakia. Istrobot consists of four categories – LineFollower, MicroMouse, MiniSumo and FreeStyle.
Probably the most popular entry-level contest, which is also appropriate for the youngest categories of contestants, is Linefollower. Nowadays it often occurs with additional tasks. In fact, there are dozens of robotic contests where the task is based on line following. Although the rules differ, the basic principle remains the same: to follow the line (coloured, wireless, magnetic, etc.), and to successfully fix all the issues of the course.
This task is a simple model of real storage houses. The task of the robot on the Istrobot contest is to follow a black, 15 mm wide, line from the start to the end (Balogh, 2004a). During the run, different troubles (see Fig. 2) may appear, for example: interruption of the line (approx. 3 cm long), a tunnel and photographic flash (both dramatically change light conditions for optical sensors), and the obstacle on the line (usually a brick). Only the fastest robot from the three runs is considered. The fastest robot wins. There is a size limitation of 25 × 25 × 25 cm.

Line follower route on the Istrobot 2002 contest
The robot used to be a contestant's construction. Commercial kits are allowed, but ready-made robots cannot compete. Changes in the construction or in the algorithm between the runs are not allowed, but slight adjustments (sensor calibration, battery recharging) are allowed.
The nicest robot of our contests was the Cyberbug III (see Fig. 3). It won the 2002 contest and became very popular among the audience. The robot was controlled with Basic Stamp microcontroller, driven by two modified model servos and was equipped with five binary line sensors and three analogue infrared obstacle detectors. It was powered from two 7.2 V Li-Ion accumulators.

The Cyberbug III. Winner of the Istrobot 2002 contest in category Linefollower. Author: Jopy Hecko
At the 8th Cybernetics Conference in 1952, Claude Shannon presented his maze-solving machine (Kassianidou et al., 1999). A maze was solved by ‘trial and error’. The robotic mouse (see Fig. 4) contained a permanent magnet and was driven by an electromagnet from beneath the maze. A relay circuit consisting of 110 relays controlled the motion of the electromagnet. Shannon named the mouse Theseus, after the Greek hero that found his way through the labyrinth of the Minos, the king of Crete.

Claude Shannon and his electromechanical mouse Theseus. Image © 2001 Lucent Technologies, Inc.
The first Amazing Micromouse Maze Contest was held in June 1979 in New York during the National Computer Conference (Bräunl, 1999). Out of 6,000 entries received, only 15 micromice competed. Interest was high, since media massively covered this event. The fastest mouse was the Moonlight Flash and it won the grand prize of 1000 USD with a run time of 30.04 seconds. The robot did contain an 8748 microprocessor, three forward optical sensors and two DC motors. Power was provided by the three NiCd rechargeable and four standard AA batteries (Allan, 1979).
A European version of the contest was launched at Euromicro conference in London in 1980. Five years later, in 1985 in Tsukuba, Japan saw the First World Micromouse Contest during the Expo'85. Since that time many annual contests were held and many sophisticated designs have appeared. One of the fastest micromice, MITEE 8 by David Otten of MIT, contains two DC motors with encoders, six 225mAh NiCd rechargeables and weights about 200 grams. Side sensors consist of infrared emitter and a PSD sensor, whose output is proportional to the distance independent of reflectivity of the surface (Anon, 1991). According to the standard IEEE MicroMouse rules (Anon, 2004e), the robot should find the path through the maze from the start square to the destination square. The maze shall comprise 12 × 12 multiples of an 18 × 18 cm unit square. The mouse must be completely self-contained and must receive no outside assistance. During 15 minutes it can perform more runs from the start to destination and also it can perform the maze mapping. The fastest robot wins. The mouse should be fully autonomous; its dimensions are limited to 25 × 25 cm (i.e. the robot can be equipped with arms, which enables to see over the walls). Floor is painted black; walls are white with red tops with height of 5 cm (see Fig. 5). There are several contests each year; the next will be in April 2005 in Bratislava, Slovakia (Balogh, 2004a), or during the APEC 2005 Conference at Austin, Texas.

Robot DAN – the winner of the Istrobot 2004, category Micromouse. Author: Karel Locker
In the very popular climbing contest the task is to design a robot, which is going to climb a flat vertical wall (magnetic or non-magnetic) while avoiding obstacles in the path. In an advanced class, also a small wall should be overcome. The major challenge is to climb a vertical wall starting from a horizontal plane (Anon, 2004b). This competition is in principle very similar to the navigational ones. It requires some changes in construction, but algorithms are almost the same (Caltabiano et al., 2004). Robots constructions differ according to the type of a holding mechanism – for magnetic walls are used standard constructions equipped with additional permanent magnets. For non-magnetic walls different types of suction caps or vacuum pumps are used (see Fig. 6). This contest has been organised each year since 2000 during the CLAWAR conference.

Robot Alicia (Caltabiano et al., 2004) climbing the wall at the CLAWAR/EURON workshop in Vienna
The objective of this contest (Anon, 2004m) is to build an autonomous mobile robot that can navigate through a square maze that represents a model house in order to find a lit candle representing fire in the house and extinguishes the fire in the shortest time. The maze consists of four rooms and connecting hallways. Robot should avoid obstacles (furniture), which are inside of the rooms. For extinguishing, different methods are used. The most often it is a fan or a carbon dioxide flux (Pack et al., 2004).
MiniSumo
Robot sumo is one of the most popular robotics events based on real Japanese Sumo matches. Robots try to push each other out of a circular arena (dohyo). There are two general groups of sumo robots, autonomous and remote controlled, which compete in different weight divisions. Table 2 lists the various divisions, maximum sizes, as well as the diameter of the sumo ring.
Classification of competitions.

Classification of competitions.
Different Robot Sumo categories (Cook, 2003). U – unlimited

The arena is black ring with white boundary and with two brown lines in the middle for better positioning. Match takes maximum 3 minutes and it is necessary to win minimum two out of three runs.
The game is interrupted if robots are clinched for more than 5 seconds. Before the real game, the classification is usually performed. During it, robots have to push out of the ring the brick of the half weight. When any robot touches the outside of the ring, it looses the run. This is also true for any part of the robot, even if it drops down from the robot and later it is pushed out. The rules are the same for all of the weight divisions. The only differences between them are sizes of robots and a sumo ring.
Detailed rules may be found in (Cook, 2003), (Anon, 2001a), (Anon, 2004a), (Anon, 2004c).
A typical robot of this contest is P3 (see Fig. 7). The robot is inspired by Mark III (Anon, 2004h) and it is driven by two modified servos, powered from standard AA accumulators, controlled by PIC16F877 running at 20 MHz. Sensors include three reflex sensors for arena borders and two Sharp DP2D12 for detection of an opponent (Szylar, 2003).

Robot P3 (right) during demonstration match
Even though the task looks very easy, and the environment is precisely defined, the presence of the opponent's robot changes the situation dramatically. Just finding the opponent may be a problem for beginners. At the start, it can be placed anywhere in it's half of the ring.
Eurobot is a high-level international robotic competition, which started in France in 1993. Last year, more than 200 teams, from 25 different countries participated (Caltabiano et al., 2004).
Eurobot is an international amateur robotics contest that is opened for teams of young people, organised either in student projects or in independent clubs. Eurobot values, fair play, solidarity, technical knowledge sharing and creativity both through techniques and project management more than competition.
Rules change each year in order to give new teams the same chance, and to stimulate also those who have already participated. Nevertheless some points remain the same: the match lasts roughly 90 s, the maximum allowed robot dimensions are 30 × 40 × 40 cm and the competition area is defined as a 2 × 3 m table surface with a more or less complex topology.
2001: The Space Odyssey
The author visited the competition in 2001, when it was inspired by the Space Odyssey: two teams of robots had to conquer a galaxy and place flags on the planets represented by cylinders of different colours and height. There were 19 teams from 12 different countries.
The goal of the contest was to build fully autonomous robots that play on a field of 2 × 3 m, and to place flags on the planets to conquer them. Two teams started simultaneously (one on each side of the playing field) and had to conquer as many planets as possible within 90 seconds. Two points were scored if a flag was placed on a planet. However, if two opposing flags were placed on the same planet, only the higher flag scored two points, the lower flag scored only one. A double score was given for placing a flag on the sun (Anon, 2001b).
Fig. 8 illustrates the possibility to participate and to compete even with very simple device – the ‘robot’ is without any microcontroller. It has a wooden construction. The only electronic parts were motor and battery, and the flag-deploying section was purely mechanical. After the start it only directly moves to its final position. Then rubber catapults were initiated and they fired all flags in the (hopefully) correct directions. During the preparation phase of the contest all the teams performed intensive software debugging, but author of this robot just adjusted proper lengths of the rubber bands.

Wooden robot with rubber catapults. Eurobot 2001
2005: Bowling
Bowling is the theme for the next year of Eurobot. For the first time it is going to be outside of France, in Switzerland, Yverdon Les Bains. The goal of the competing robots is to knock over as many skittles of its own colour as possible and possibly put up the opponent's skittles. The mission is going to be hindered by unknown bridge and skittle positions.
They are going to be placed randomly, as the trend of the recent years is to prefer smart strategies able to react to its environment against fixed automata. To participate in Eurobot the robots (one or two for each team) have to be fully autonomous.
The left and right parts of the playground has pattern 5 × 7 squares (each 30 × 30 cm) and they are separated by a 60 cm ditch that can be crossed using one of the three available bridges. The middle bridge is fixed but the position of the other two will be randomised for each match. At the beginning of the match the skittles are placed on the field (symmetric with the centre of the field). There is one fixed position for the skittle groups at each side of the field next to the middle bridge (see Fig. 9). Another three groups are placed randomly on the field. Detailed rules including all dimension specifications and drawings can be found at the official Eurobot web pages (Anon, 2005a).

Illustration of Eurobot 2005 rules. © 2005 Eurobot (http://www.eurobot.org)
As classical AI problems (maze, chess) were close to its satisfactory solutions, a new initiative looking for new challenges appeared. In the 1993 there was a worldwide-accepted initiative, which tends to support and fasten technological evolution and to propagate science and technology. Robot soccer was chosen as appropriate for this purpose.
At this moment there are two worldwide robot soccer organisations (FIRA and RoboCup) with very similar scope. They differ in sizes of robots, playground and number of players. There are several categories in robosoccer (simulation, semi-autonomous, autonomous, legged), classified by the size of robots, number of players, level of autonomy etc. RoboCup is an international joint project to promote AI, robotics, and related fields. It is an attempt to foster AI and intelligent robotics research by providing a standard problem where wide range of technologies can be integrated and examined. The soccer game is used as a central topic of research, aiming at innovations to be applied for socially significant problems and industries. The ultimate goal of the RoboCup project is
”By 2050, develop a team of fully autonomous humanoid robots that can win against the human world champion team in soccer.” (Kitano et al., 1998)
Of course, we are still far away from that goal, but the roadmap is prepared (Burkhard et al., 2002). In the meantime, different categories were created, some of them showing very interesting achievements.
Let us look closer to some of categories according the RoboCup, (corresponding FIRA league in parentheses):

Robby-Go in the paddock during the 2003 Fira World Championship in Wien
Main technical issues of this category are robust colour processing and colour tracking, since teams and the ball are distinguished based on colour of objects. Since robots in this category are pretty fast (up to 3m/s), image processing should be very fast, and robots used to be robust enough to sustain even strongest collisions. The crucial point is a good and reliable wireless link.
Due to the slipping problems, modern robots include also acceleration sensors for controlled acceleration of robots (Han, 2004). A key to the victory is perfect control of the robot position independently on the light conditions (shadows from robots) and precise navigation of the robot on the playground. It shows that omnidirectional system with more than two wheels gives better control over the robots. This category is very popular, for example, in the FIRA MiroSot category there are more then 100 teams worldwide (Han and Kopacek, 2004).
Robots should be fully autonomous, with an onboard computer, a vision system for ball and players detection, and with the possibility of communication between players. In the near future, robots should show cooperative behaviour, more quality of work with ball, and ability to play without walls surrounding the playground.
There are also separate leagues e.g. for Khepera (FIRA) or Lego (RoboCup) robots. RoboCup Four-legged league is specific, because all teams must use the robot platform that was developed by Sony based on their Aibo robot. The game is three robots against three robots.
Humanoid robot HanSaRam V (see Fig. 11) is the fifth member of the family developed since 2000 at Robot Intelligence Technology Lab, KAIST, Korea. It consists of 12 DC motors, 16 RC servo motors and utilises feedback stabilisation based on force sensors. It contains an onboard computer for general behaviour, gaits generation and satellite microprocessors for motor control (Kim et al., 2004).

Korean robot HanSaRam V relaxing during the 2003 Fira World Championship
So far many technical and scientific problems were solved. The fields of research are listed in many works (Burkhard et al., 2002), e.g.:
mechanical design (especially for humanoid robots), power supply (robots should play the game with the same batteries), basic control issues (high performance, speed, robustness, reliability), sensory systems (vision, motion, position, stability, sensor fusion), high-level cognitive systems (strategy, learning, recognition)
The scientific results originating in RoboCup have broad impact on robotics and computer science, especially with regard to problems in real-time sensing, acting and reasoning (Lima et al., 2002). But it is necessary to mention that eleven humanoid soccer robots team of reasonable size will exceed the budget of most universities.
The next World Cup will be held in Osaka, Japan in July 2005.
One of the major applications of RoboCup technologies is a search and rescue in large-scale disaster. RoboCup initiated RoboCupRescue project to specifically promote research in socially significant issues (Anon, 2005d).
RoboRescue
RoboCup Rescue league has started in 2000 with the research emphasis on multi-agents found in all RoboCup soccer leagues, expanding that focus to areas of human-robot interactions, and fieldable technology (Osuka et al., 2002).
Rescue robotics shows a direct contribution of technology to the society. It also demonstrates state-of-the-art in robotics and helps to facilitate its acceptance by the rescue community and public in general. The idea is to minimise risk to search and rescue personnel, while increasing victim survival rates. Robots will help human rescuers to quickly locate and extract victims. The mission for robots is to find victims, determine their state, locations and then report back to help create a map of the building with victims localisations and their statuses. The human operator must still search for all signs of life, including the shape, movement, heat, sounds or carbon dioxide emissions.
Three annual robotic competitions, described in (Anon, 2004i), (Anon, 2004j), (Anon, 2002) and (Osuka et al., 2002) were organised around the world with the aim to improve technology, and to use it for victim search and identification e.g. in collapsed buildings after earthquakes. Since 2003 AAAI and RoboCup events are organised together.
Vision for this league to 2050 as stated by Kitano et al., (1999) is: when disaster happens, minimise risk to search and rescue personnel while increasing victim survival rates by fielding teams of collaborative robots, which can:
autonomously negotiate collapsed structures, find victims and ascertain their condition, produce practical maps of their locations, deliver sustenance and communications, identify hazards, provide structural shoring, allowing rescuers to quickly locate and extract victims.
Competition mission is to objectively evaluate mobile robots in a challenging and realistic environment and to develop performance metrics and standards for mobile robots.
Rules
A human operator controls the robots, based only on information from robot's vision system and sensors. The operator is located in a separate room. During the time limit, robots should search unknown terrain (e.g. ruins after the earthquake), with potential victims represented by figurines (see Fig. 12). Victims may show some marks of life, e.g. increased temperature, moving legs, carbon dioxide emissions or simply sounds. Contestants have to create the best possible map, locate position of possible victims, and describe their status. Positive points are for correct symptoms, negative for mistakes. Unwanted contact with figurine is penalized.

Robot Orpheus (Zalud, 2004) from the Czech Republic, winner of the Rescue Robot League during RoboCup 2003 in Padova, Italy. Notice the legs of the simulated victim behind the robot
Competition arenas are based upon the NIST Reference Test Arenas for Autonomous Mobile Robots described on their web page (NIST, 2004), which contains three sections with different difficulty: The yellow section is almost flat. The orange arena contains also steps and floors and red is totally unstructured and unstable – a real rubble yard (Lima et al., 2002), (Anon, 2003). Various obstacles (bricks, wires, ropes…) may appear anywhere.
There is a pressure on designers to add more autonomous behaviour and to not use excessive wireless communication with the robot. During the competition there will be a short period with interrupted communication (‘hands off / eyes off’).
The next, 2005 RoboCupRescue - World Championship and Symposium will be hosted in Osaka, Japan in July 2005 (Anon, 2005b).
Probably the most difficult current contest is Grand Challenge – a competition announced by the Defence Advanced Research Projects Agency (DARPA). It should accelerate research and development in autonomous ground vehicles that will help save (American) lives on the battlefield.
The 2004 Grand Challenge ran from Boston, California to Prim, Nevada – 230 km across the Mojave Desert offered a 1 million USD prize. Grand Challenge route should demonstrate the ability to move across a terrain at realistic speeds and distances. The route can be traversed by a commercial 4 × 4 pickup truck. Unmanned vehicles should be fully autonomous, their maximum weight is 20 tons, dimensions 3 × 2.7 m. Vehicles can use commercially available GPS receivers, but other wireless communication is not allowed. Refuelling of vehicles is not permitted. Before the start, each team will obtain a compact disc containing route definition data file. After the start, vehicle should track these required points and (possibly) successfully arrive to the destination. During the run vehicles must detect and avoid obstacles therein.
On 2004 event, winning vehicle should travel the route in the less than 10 hours. DARPA received 106 applications, 86 teams subsequently submitted technical papers with the systems description (power, sensors, mobility, communications). After their evaluation, only 19 teams among them were selected to participate in the qualification. Later only 15 teams qualified for the Grand Challenge event. The prize went unclaimed – nobody was able to drive the desert route. Among 15 finalists, six did not even leave the start area. Other five vehicles did not travel more than 2 km. Red Team's vehicle No. 22 which achieved the best result did finish at 12th km when it got caught on a berm (Anon, 2004d).
According to the author's opinion, not the task was too difficult, but there was lack of time for testing and evaluation of vehicles. This was brand new design and all teams started their constructions from the scratch. Next, 2005 DARPA Grand Challenge will be held on October in the desert Southwest. The fastest team that will pass the whole, less than 282 km long route will receive doubled, 2 million USD reward (DARPA, 2005).
Man vs. Machine
One of the first attempts to build a machine able to beat humans was enacted in 18th century in Pressburg, now Bratislava, Slovakia. Wolfgang von Kempelen, skilled mechanician, created in 1769 his famous “chess automaton” (Windisch, 1783) with a figure of Turk playing a game of chess (see Fig. 13). It was presented at the court of the empress Maria Theresia and it is said to have beaten Napoleon in one of its games (Tarnóczy and Dudley, 1950).
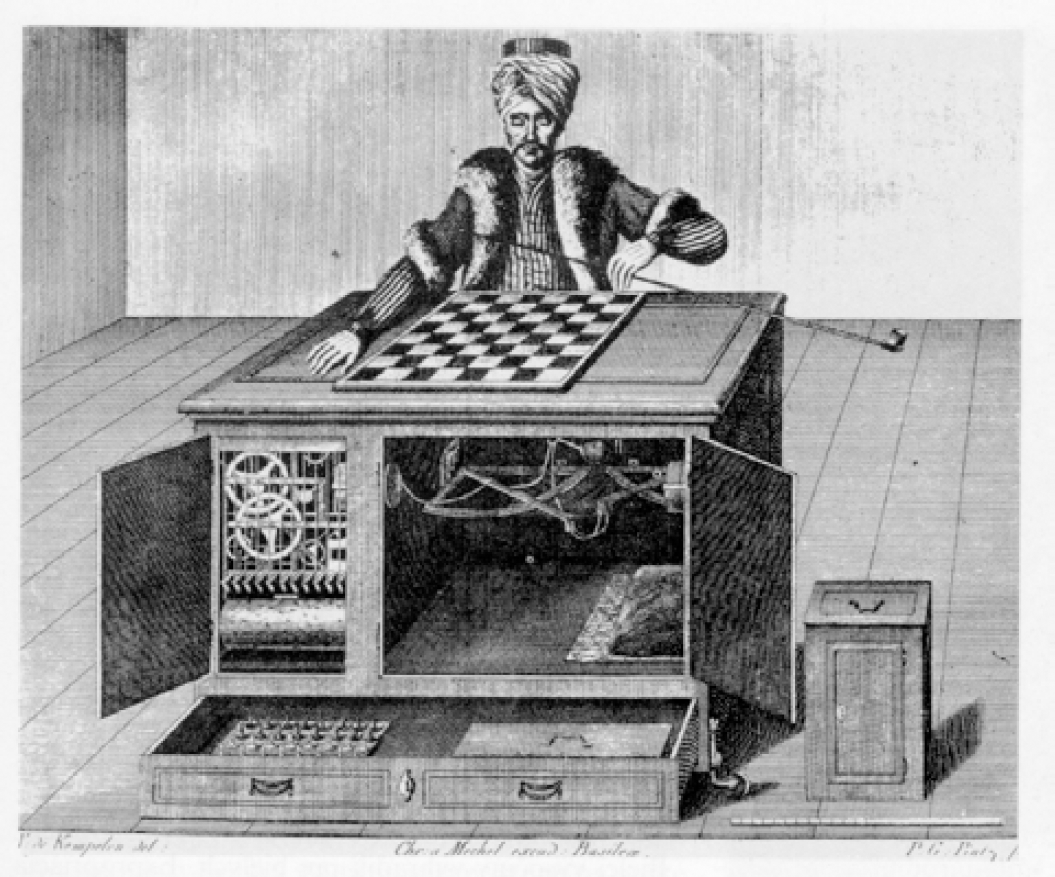
Kempelen's chess-player (Windisch, 1783)

Human vs. Humanoid (Robot Firstep) at the RoboCup 2003 in Padova, Italy. © 2003 The RoboCup Federation
Even though this machine was not a true automaton – there was probably skilled player who was concealed in the cabinet (see analysis of Poe, 1836) – the mechanical ingenuity is still fascinating.
Though unavailing, the persistent idea didn't sleep. The next, successful, step was long awaiting. In 1949 Shannon built the first machine that played chess at MIT. Shannon set out to prove that a computer could indeed play a good game of chess by the use of a suitable program. In 1950, Alan Turing wrote the first computer chess program.
Although it was not good player, it served well its main purpose: it showed that computers could play chess (López-Ortis, 1993).
Finally, this dream becomes true only few years ago. In May 11th, 1997, IBM's Deep Blue Supercomputer played a fascinating match with the reigning World Chess Champion, Garry Kasparov. The game lasted more than an hour and Garry Kasparov resigned 19 moves into Game 6, handing a historic victory to Deep Blue. The win gave the IBM supercomputer a 3.5–2.5 victory in the six-game rematch. It was the first time a current world champion has lost a match to a computer opponent under tournament conditions (IBM, 1997). Even the machine was able to beat the human; it is not surprising that its appearance is far from the Kempelen's automaton. Moreover, the machine didn't use its intelligence but power, i.e. not using the same intelligence. In this context it is interesting to note that also the final goal of RoboCup is to beat the best human players by 2050…
Unfortunately, the Humanoid league is still thinking about where to begin (Burkhard et al., 2002). There should be also lot of ‘philosophical’ questions solved, e.g. definition of humanoid. It should include physical aspects (height, weight, appearance, two legs), capabilities (should the robot use 360 degrees vision system?), and behaviour (how fast 2-legged robot is still considered humanoid?). The final goal seems to be very far. But robots improve every year a lot.
New initiative wants to cover all the competitions in a similar manner as in human sports. The idea is to have everything under one roof at the same time, i.e. a Robot Olympiad. It has been organised since 1999, by the International Robot Olympic Committee (Anon, 2004g). It is aimed to offer youngsters up-to-date technology competitions similar to the international mathematical or physics Olympiads. The event includes many of categories mentioned above, e.g. Robot Line Tracing, Legged Robot Obstacle Race, FIRA Robot Soccer, RoboDancing, and RoboBasketball etc. The 6th International Robot Olympiad was held in November 2004 in Daejeon, Korea.
This activity is supported by active national partner organisations, e.g. from 2003 there were international robot games organised by The Robotics Society of America. The next event will be held in March 2005 in San Francisco, with robot soccer, sumo, walking and talking robots and many more categories (Anon, 2004k).
Experiences
Now we present some of the author's experiences with organising of the competition Istrobot. During last five years of successful competitions (Balogh, 2004b) we have attracted the attention of many gifted students to robotics. They are more motivated for deeper studies at our department. The event gained nation-wide media coverage in the major print and broadcast outlets. Our experiences show that the main problem the contestants face is a mechanical construction of their robots. Usually students of electrotechnics have only limited experiences with mechanics.
Also, a good mechanical workshop is missing. An interesting fact is that the majority of the participants are self-taught in robotic. Organising such a contest brings some technical problems, which may be solved as an appropriate task-oriented student projects. Now, we mention two of them.
In order to measure time and speed of contest robots, we developed a special electronic stopwatch. It consists of special interface for connection of industrial reflex photoelectric sensors to the standard PC's parallel port. The corresponding software provides automatic measurements, logging, order evaluation and a large display for an audience (see Fig. 15). The program runs under Win32 environment.

Display of the electronic stopwatch
Another project currently solved is devoted to a tracking of the mobile robot in a maze by camera. The software recognises a moving object, transfers it to the model of the maze and displays its path on a large screen for the auditory. The movements are stored into a file for later reproduction, studying an algorithm, its fails, and for simulations. The program, written in Delphi 7, scans the camera picture, determines movements with reference to the background and draws a trajectory of the mobile robot. The shape of the robot, which is moving inside the maze, is unknown and its determination is based only on a robot's movement. The result of data processing is a file that contains the robot's location related to the time.
Since promoting competitions is not a task of this article, we just summarise some of their benefits:
they are very attractive events for media and public, they promote interest in robotic studies and research among students, they help to compare scientific results, and exchange experiences, they establish new contacts between students, schools and industrial companies, ideas are often applied also in ‘useful’ projects, they serve as a very good educational tool, widening students' knowledge.
Educational qualities of competitions are approved in many articles (Bruder and Wedeward, 2003), (Gerovich et al., 2003), (Hyyppä, 2004), (Murphy, 2001), (Michaud et al., 2003), (Pack et al., 2004), (Siegwart, 2001), (del Solar and Avilés, 2004). Using a robot competition, as a part of university curricula is advantageous, because it attracts students, motivates them more than ordinary courses, especially when they make a project from conception through implementation and testing to realisation (Steinbauer and Wotawa, 2004).
It is a popular and effective way of teaching system integration in engineering curricula at universities. It significantly improves an ability to use techniques, skills and modern engineering tools necessary for engineering practice (Baerveldt et al., 2003).
Possible educational areas include: mathematics and physics, mechanics, electronics, computer science, automation and control, communications, design, construction, testing/repairing, installing etc. Many authors also mention significant improvement of teamwork, better function in multi-disciplinary teams, strengthens of student's self-confidence.
To mention both sides of the coin, it is an expensive method of teaching and consumes much more student's, and teacher's time. More consultations are required and the teacher should be gifted by some manager skills.
Conclusions
We could write another dozen pages about various contests, but it cannot replace the experience of seeing some of them with your own eyes; and much better - of participating in one.