
Abstract
This paper presents a fast and high-resolution estimation approach using polarization information combined with angle information for multi-target localization in bistatic multiple-input multiple-output (MIMO) radar. The propagator method (PM) is extended to jointly estimate the direction of departure (DOD), the direction of arrival (DOA) and the polarization parameters. The PM avoids the singular value decomposition (SVD) of the covariance matrix of the received signals so that the computational complexity is reduced. In addition, the closely spaced targets can be well distinguished by polarization diversity. The Cramer-Rao bounds (CRBs) of the estimated parameters are derived. The position of a target is calculated based on the estimated angles. The simulation results demonstrate that the proposed approach can achieve better performance compared with conventional methods of target localization.
Introduction
Multiple-input multiple-output (MIMO) radar [1] and its applications in localization and direction–finding [2]-[3] have recently been the focus of intensive research. Specifically, many target localization methods for bistatic MIMO radar have been investigated to estimate both direction of departure (DOD) and direction of arrival (DOA) [4]–[13]. However, when multiple targets are closely spaced and cannot be well distinguished from the spatial domain, the resolution of these algorithms is greatly degraded. In recent years, polarimetric radar has reflected the tremendous advantages in target estimation, detection and tracking [14]. Considering that target echoes at different locations have different states of polarization, an ESPRIT-based DOD-DOA-polarization estimation method was proposed by us in [15] for bistatic MIMO radar, in which polarization information can be made full use of to improve the target resolution.
In array signal processing, the propagator method (PM) [16] is a fast DOA estimation approach, which can avoid singular value decomposition (SVD) of the covariance matrix. However, spectral peak searching through all the two-dimensional (2D) space is the main computational burden if the parameters of both DOD and DOA need to be obtained. In [11], a fast multi-target localization algorithm was proposed using PM-based DOD and DOA estimation. In this paper, a novel fast and high-resolution estimation approach is presented using polarization information combined with angle information for multi-target localization. A traditional PM algorithm is extended herein to jointly estimate the DOD, the DOA and the polarization parameters, which can avoid the calculation of the SVD of the covariance matrix, as well as peak searching. Therefore, the computational complexity is further reduced and fast multi-target localization can be implemented. Also, by using polarization diversity, the closely spaced targets can be well distinguished with a high resolution. To evaluate the performance of the proposed approach, the Cramer-Rao bounds (CRBs) of the estimated parameters are derived. The position of a target is calculated based on the estimated angles.
The paper is organized as follows. In the next section, the signal model of bistatic MIMO radar based on polarization sensitive receiver array is described. In Section 3, a fast and high-resolution multi-target localization approach is presented. In Section 4, the CRBs of the estimated parameters are derived. The simulation results are given in Section 5. Finally, a conclusion is drawn in Section 6.
Polarization Sensitive Array-based Bistatic MIMO Radar Signal Model
As described in Fig. 1, we consider a bistatic MIMO radar system having a uniform linear transmitter array with M elements and a polarization-sensitive receiver array with N pairs of crossed dipoles to measure the polarization information of targets. d t and d r are the inter-element spacing at the transmitter and receiver, respectively, which are no more than half a wavelength. The target's range is assumed to be much larger than the aperture of the transmitter and receiver arrays. M elements of the transmitter simultaneously transmit waveforms, which are orthogonal, to each other. These signals are reflected by P targets with different Doppler frequencies and complex amplitudes. For the pth target, p = 1, 2, ·, P, its angles, say, DOD and DOA, are denoted by θ p and ϕ p and its polarization information is parameterized by two polarization phase factors γ p and η p , respectively.

Diagram of a bistatic MIMO radar having a uniform linear transmitter array with M elements and a polarization-sensitive receiver array with N pairs of crossed dipoles.
In the lth snapshot, upon the reflections by P targets, the signal matrix

l = 1,2, ·, L, where s
m
∊ ℂ1×K for m = 1, 2, · M denotes a normalized transmitted baseband coded signal vector for the mth element, having a length of K and

a r (ϕ p , γ p , η p ) ∊ ℂ2N×1 denotes the pth manifold vectors of the receiver array, which can be written as

where ⊗ denotes the Kronecker product. q p ∊ ℂN×1 is the pth steering vector of the arrival signal

and ν p ∊ ℂ2×1 is the pth polarization vector of the arrival signal

for 0 ≤ γ
p
≤ π/2, −π ≤ η
p
< π. We assume that there are M matched filters at the receiver. After being matched with transmitted waveforms, the output of the mth matched filter is

where

where

where
In this section, a fast and high-resolution multiple target localization approach is described in detail. The total structure of the proposed scheme is shown in Fig. 2.

The total structure of the proposed scheme.
The approach employs the propagator method. However, we extend it by exploiting the characteristics of signal subspace of different matrix blocks and the polarization array processing technology. The DOD, DOA and two polarization parameters are estimated step-by-step based on matrix
First, in order to estimate the DOD parameters, let

Where

Here we call

By pre-multiplying

If there exist noises, we can solve

From (13) we can see that

where
Second, in order to estimate the DOA parameter, at first we form a new data matrix

where


Third, in order to estimate polarization information, let

Therefore, the estimation of polarizations can be derived from the diagonal matrix Φ
v
. Proceed the data of


where
A target can be located if its DOD, DOA and the distance D between transmitter and receiver arrays are known in a bistatic MIMO radar system. For the pth target, θ p and ϕ p are used to determine its position via trilateration and γ p and η p are used to identify multiple targets and improve the resolution. The coordinate diagram for locating a target in a bistatic MIMO radar system is shown in Fig. 3.

The coordinate diagram for locating a target in a bistatic MIMO radar system.
From Fig. 3, the coordinate of the pth target (x p , y p ) can be determined by

From the received data in (8), the Fisher information matrix with respect to θ p , ϕ p , γ p and η p can be denoted as [18]

where the (i, j) th item of

where tr (•) denotes the trace of a matrix, Re(•) denotes the real part, ei denotes the i-th column of the identity matrix and





where
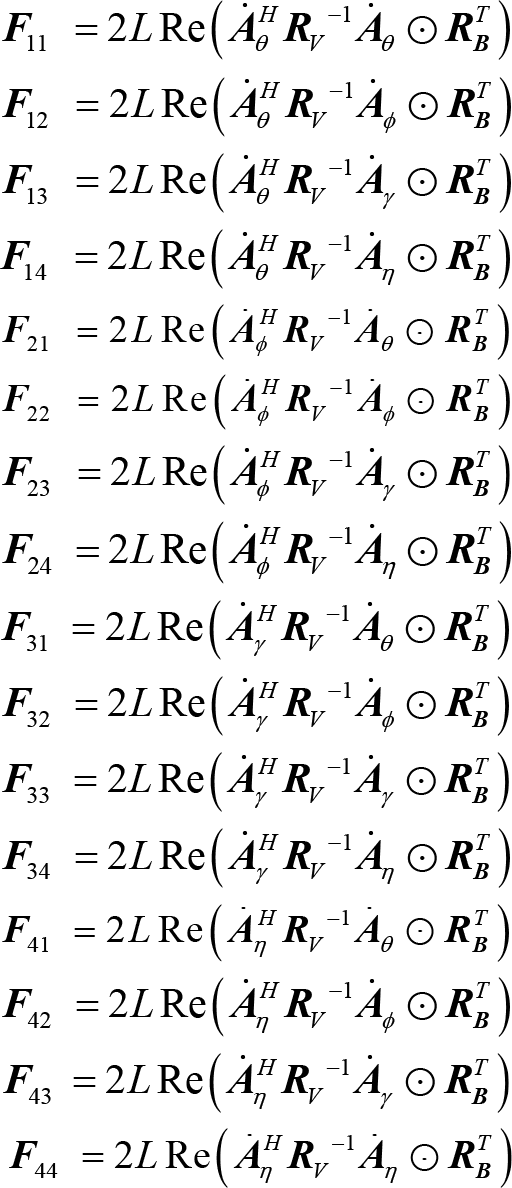
where ⊙ denotes the Hadamard Product. Therefore, the CRB matrix is calculated by

Assuming that the transmitter array consists of M = 6 elements and the receiver array has N = 6 pairs of elements of crossed dipoles, d t and d r are all half a wavelength. Walsh sequences with a length of 1024 are selected as the orthogonally transmitted waveform. All the P targets have RCS amplitudes of one and different Doppler frequencies. The target echoes are elliptically polarized with different polarization angles. The duration of a snapshot is 5µs. The number of snapshots is 500 and the estimation performance in all the simulations is obtained by 100 Monte Carlo trials.
Simulation 1
Assuming that there are P = 3 targets, their parameters of DOD, DOA and polarization are θ = (10°, 40°, 60°, ϕ = (20°, 50°, 70°), γ = (20°, 40°, 60°), η = (0°, 20°, 70°). Their Doppler frequencies are 1000Hz, 2550Hz and 5000Hz, respectively. Fig. 4 (a) and (b) respectively present the estimation results of DOD-DOA and two polarization parameters while SNR is 15dB. It is shown in Fig. 4 that the estimate approximates to the real value. The proposed approach can effectively estimate DOD, DOA and polarizations for accurate identification and location of the multiple targets in the bistatic MIMO radar.

DOD, DOA and polarizations estimation results when SNR=15 dB.
The parameter estimation performance of the algorithm is evaluated through root-mean-square error (RMSE) and root CRB. The RMSE and root CRB versus SNR for DOD, DOA and polarizations estimation are shown in Fig. 5 (a) - (d).
The results in Fig. 5 indicate that the RMSEs of DOD, DOA and polarizations decrease with the increase of SNR. The RMSE is close to the root of CRB, which is a lower bound of the unbiased estimator of variance.

The RMSE and Root CRB versus SNR for DOD, DOA and polarizations estimation.
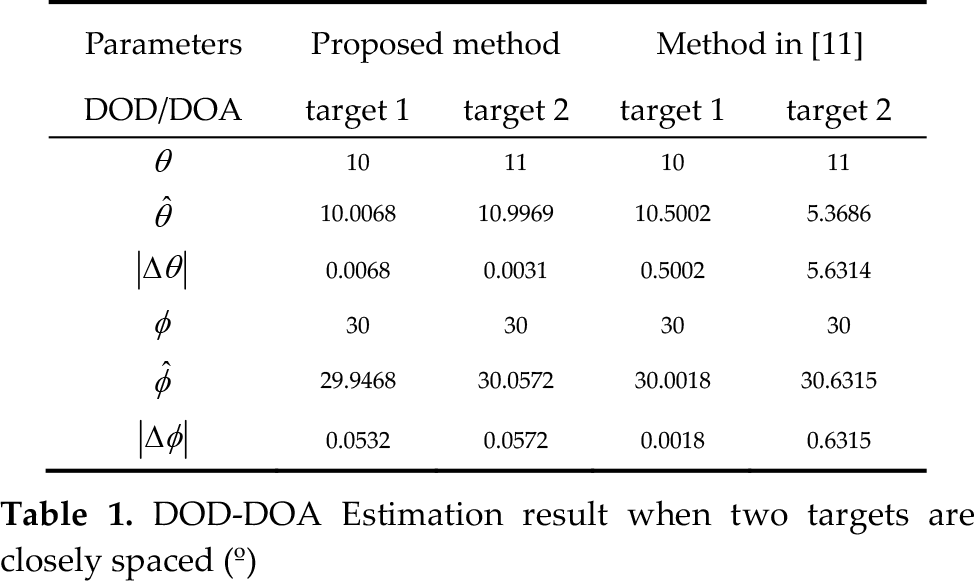
At first, the simulation investigates the situation that there are two targets being closely spaced. Assume they have the same DOA and 1° DOD difference, θ = (10°, 11°) and ϕ = (30°, 30°). Their polarization states are different, γ = (30°, 60°), η = (0°, 45°). SNR=15dB. The resolution of DOD-DOA estimation is compared between the proposed approach and Chen's Method in [11], as shown in Table 1.
DOD-DOA Estimation result when two targets are closely spaced (º)
DOD-DOA Estimation result when two targets are closely spaced (º)
Furthermore, a situation is investigated where there are three closely spaced targets. Suppose that they have θ = (10°, 12°, 15°) and ϕ = (30°, 31°, 32°). Their polarization states are γ = (30°, 60°, 90°) and η = (0°, 45°, 120°). SNR=15dB. The resolution of DOD and DOA estimation is compared between the proposed approach and Chen's Method in [11], as shown in Table 2.
DOD-DOA Estimation result when three targets are closely spaced (º)

From the data for the DOA-DOD estimation in Table 1 and Table 2, we observe that when the radar targets are too closely spaced to be distinguished, the proposed method can effectively identify different targets with high-resolution by taking advantage of the different states of polarization of the echoes. However, the method in [11] cannot identify multiple closely spaced targets. For example, in Table 1, the estimate of DOD for target 2 is 5.3686º, which deviates from its real value of 11º. Also, in Table 2, the estimates of DOD and DOA for target 3 are 4.7493º and −1.5003º, which greatly deviate from the real values of 15º and 32º.
Assume that the distance between transmitter array and receiver array is D=100m. There are three closely spaced targets whose coordinates in x-y plane are (63, 35), (66, 40), (70, 45) in metres and SNR=15dB. The localization results of the three targets are shown in Fig. 6.

The localization results of three closely spaced targets.
It can be seen from Fig. 6 that the estimates of the coordinates of the three targets are close to their real values. The proposed approach can effectively locate closely spaced targets.
The localization errors versus SNR for the three targets are shown in Fig. 7. The result indicates that the proposed approach has high localization accuracy in positioning multiple closely spaced targets.
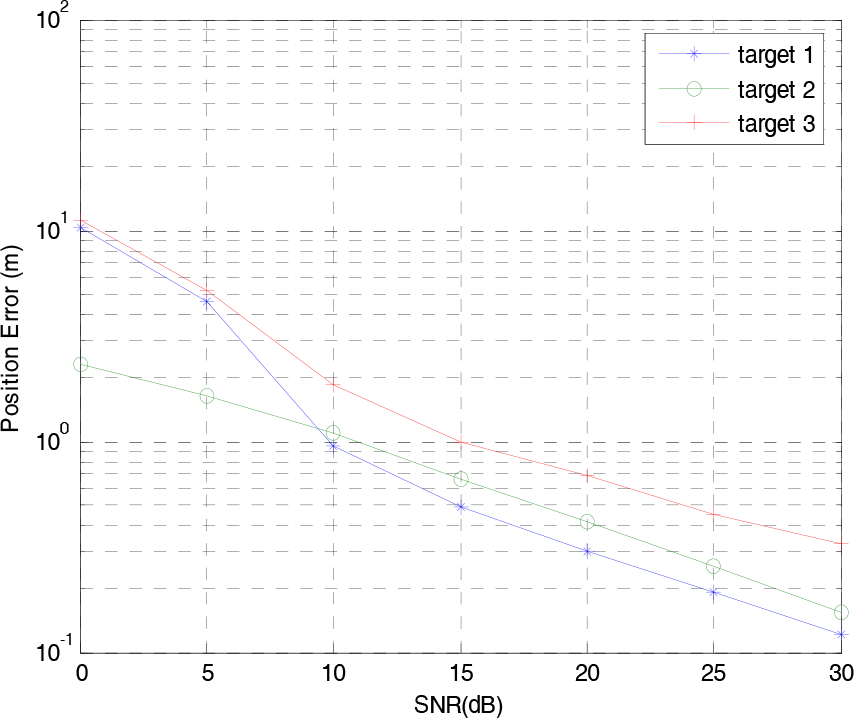
Localization error versus SNR for three closely spaced targets.
In this paper, we propose a fast and high-resolution multi-target localization approach in a bistatic MIMO radar system by extending the traditional propagator method to estimate DOD, DOA and polarization parameters. The proposed method can effectively combine polarization and angle information to accurately identify and locate multiple targets. The closely spaced targets can be well distinguished by polarization diversity. Also, the propagator method avoids SVD in the covariance matrix and spectrum peak searching; therefore the computational complexity is reduced. Based on the angle and polarization information, the two-dimensional (2D) position of a target can be calculated via trilateration. In future research, the three-dimensional (3D) position of a target will be further determined by estimating the elevation-azimuth angles of DOD and DOA and the Doppler shift can be estimated to locate and track moving targets.
Footnotes
7. Acknowledgments
This work is supported by the National Natural Science Funds of China (61071140 and 60901060), as well as Jilin Provincial Natural Science Funds of China (201215014).