
Abstract
A novel fault tolerant control scheme, using model-based control and time delay control theories, is proposed for flexible satellites with uncertainties and actuator saturation and the stability condition of the scheme is analysed. The moment–of-inertia uncertainty, actuator faults uncertainty, space environment disturbances and the actuator saturation are analysed. The computable control torques, including the space environmental torques, reaction wheel dynamics and the known flexible appendage dynamics, are formulated using the model-based control. The unknown flexible satellite dynamics is estimated according to its one-step previous value and employed to update the control command; this greatly reduces the conservativeness and enhances the pointing accuracy. Numerical simulations under different conditions demonstrate the advantages of the novel proposed controller compared to the conventional PD controller and a simplified fault tolerant controller.
1. Introduction
Owing to the advancement of space mission requirements, accuracy and reliability are playing more and more significant roles in satellite attitude control. However, the dynamics of the flexible satellite is highly-nonlinear and time-varying in the presence of flexible appendage dynamics, actuator dynamics, actuator saturation, reaction wheel friction, space environmental disturbances, the moment-of-inertia uncertainty and even the actuator faults. These uncertainties and disturbances degrade the performance of the attitude control and even cause mission failure, especially in cases of actuator faults and flexible appendage. Therefore, the attitude controller must be robust enough to cope with those uncertainties and disturbances simultaneously.
Fault tolerant attitude control of the satellite remains a great challenge and attracts attention from many researchers. Jin [1] proposed a fault tolerant controller for the rigid satellite with uncertain actuator faults and white noise; Yang and Sun [2] applied the simulated disturbances, which is composed of the sin and impulse functions, and ultimately derived the robust fault tolerant controller to cope with the inertia matrix uncertainty and the simulated disturbances; Lee and Kim [3] employed the finite reaching time SMC to design the attitude controller in the presence of actuator faults and solar array disturbances. However, previous pieces of research can only deal with the rigid satellite attitude control, which is a great limitation to their applications. Recently, with the assumption that the lower actuator effectiveness factors are bounded, an adaptive backstepping fault tolerant controller [4] for flexible satellites was formulated by Jiang and applied in a situation of uncertain inertia; however, the assumption induces conservativeness to the control law. In 2011, Xiao [5] proposed a fault tolerant controller for flexible satellites without angular velocity magnitude measurement by ignoring the actuator dynamics. Moreover, numerous theories such as fuzzy control [6], second order sliding observer [7], diagnosis tree [8], recurrent Neural-Network [9], Kalman filter [10] and UKF [11], have been successfully employed in the fault diagnosis of the satellite system. More literature on fault diagnosis and fault tolerant control can be found in the reviews [12–15] and the references therein. However, few researchers have simultaneously analysed the influences of the inertia uncertainty, environmental disturbances, flexible appendage dynamics and the actuator faults for the flexible satellite attitude control.
During the past decades, several control methods have been proposed for satellite attitude manoeuvres, linear control theories such as Proportional-derivative control [16], H2 / H∞ / H-index control [2,17–19], and nonlinear control theories such as time delay control [1], sliding mode control [20], and adaptive control [21,22]. Of these control methods, the time delay control is a simple and effective method for satellite attitude control, and it has been successfully employed in the rigid satellite system [1]. It can be applied to linear and nonlinear systems with unknown dynamics and disturbances, and can obtain satisfactory results [23]. Moreover, the main advantage of the method is that explicit model and parameter estimations are not required. However, Jin [1] focused on the rigid satellite attitude control and did not introduce any satellite dynamics terms into the controller design, which is too conservative for the attitude control. According to the above analysis, the fault tolerant control for the flexible satellite with uncertainties and actuator saturation is quite necessary.
In this study, a novel fault tolerant control strategy for uncertain flexible satellite systems is derived based on the model-based control and time delay control theories. Three main contributions of this paper can be listed as follows. First, an analysis of the uncertainties and disturbances mentioned above is used to formulate the explicit flexible satellite dynamics, which is then employed in the subsequent control scheme to enhance the robustness of the proposed method. Second, the computed space environmental torques, reaction wheels dynamics and the known flexible appendage dynamics are formulated using the model-based controller to reduce the conservativeness and enhance the stability margin. Furthermore, the unknown flexible satellite dynamics is estimated based on its previous one-step information and employed to update the control command, which includes the uncertain moment-of-inertia, uncertain actuator faults, space disturbances estimate errors and flexible appendage dynamics estimation errors.
The paper is organized as follows. In Section 1, the integrated flexible satellite dynamics, including the reaction wheel dynamics and flexible appendage dynamics, is formulated. The uncertainties of the flexible satellite dynamics are described in Section 2. In Section 3, a conventional PD controller is presented. Two fault tolerant controllers are proposed for uncertain flexible satellites in Section 4. A comparison of the three controllers is given in Section 5, followed by the conclusion in Section 6.
2. Flexible Satellite Dynamic Modelling
2.1 Kinematics Equation
Due to its nonsingularity, the unit quaternion

where φ is the Euler angle; [ex ey ez] denotes the Euler axis;
The kinematics equation of the satellite's attitude can be written as [22]
where

2.2 Flexible Satellite Dynamics
Considering the reaction wheels driven rigid satellite, the total angular momentum of the satellite Hs can be given as

where Js is the inertia matrix of the satellite (including the reaction wheels); Cw represents the matrix the columns of which contain the axial unit vectors of the wheels; Jw denotes the axial moments of the inertia matrix of the wheels; Ωw is the angular velocity of the reaction wheels.
The dynamic equations of the rigid satellite can be described as

where τd denotes the environmental disturbances vector. Considering the affection of the flexible appendages, the flexible satellite dynamics can be rewritten with the assumption of there being small elastic displacements as follows


where C
η
= diag {2ξiΛi} and
2.3 Integrated Model with Reaction Wheel Dynamics and Actuator Saturation
The torque generated by the flexible appendage dynamics τflexible can be described by

The control torque provided by the reaction wheels τu_com can be written as

Considering the affections of reaction wheel friction and saturation, the actual velocity of the reaction wheels Ωw_sat can be given by

where

where Ωw_satt,i means the ith element of Ωw_sat; Ω w_lim is the saturation of the reaction wheel velocity; ρv denotes the viscous friction element.
Therefore, the actual driven torque can be rewritten as

where τu,i is subject to a saturation constraint [–τu_lmi, τu_lmi].
Substituting (8) and (12) into (6), the integrated dynamics of the flexible satellite can be rewritten as

3. Uncertain Flexible Satellite Dynamics Modelling
3.1 Uncertainty of the Moment-of-inertia
Owing to the influences of payload motion, appendages rotation and fuel consumption, the moment-of-inertia of the satellite is time-varying and uncertain. To analyse the influence of the moment-of-inertia variations, the actual moment-of-inertia can be described as

where J0 represents the nominal inertia matrix; ΓJ denotes the bounded variation matrix of Js; δJ is the uncertain matrix.
3.2 Uncertainty of the Reaction Wheel Faults
Considering the reaction wheel faults, the driven torque in the reaction wheel axis frame

where
Therefore, the control torque of the reaction wheels in ℜb can be rewritten as

3.3 Space Environmental Disturbances
The primary disturbances are gravity-gradient torque, magnetic torque, aerodynamic torque and solar torque, which can be computed by [24]


where
3.4 Integrated Flexible Satellite Model with Uncertainties and Reaction Wheel Dynamics
Substituting (14), (16), and (17) into (13). The uncertain flexible satellite dynamics can be rewritten as follows

Regardless of the uncertainties, disturbances and reaction wheel dynamics, the simplified rigid satellite dynamics can be described by

4. Conventional Attitude Controller
The conventional proportional-derivative controller for the satellite attitude can be formulated as

where
5. Fault Tolerant Controller for the Uncertain Flexible Satellite
5.1 Mode-Based Controller
For the flexible satellite system, the attitude and angular rate can be measured by various instruments, such as the star tracker [25] and the rate gyro [26], respectively. Moreover, flexible appendage dynamics parameters can be obtained from numerical experiments or computational analyses. In this subsection, regardless of the influence of uncertainties, all computable torques are formulated according to dynamics equations.
The asymptotically stable reference model of the satellite's attitude can be given by [1]


Therefore, the model-based controller for the flexible satellite can be formulated by

and



where
5.2 Novel Fault Tolerant Controller
In the above subsection, the computed torque command is formulated by the model-based controller. However, there are many uncertainties to the flexible satellite dynamics in practice. The time delay control has been successfully used for the control of the unknown dynamics and disturbances, not only for linear systems but also for nonlinear systems [23]. The main merit of the time delay control scheme is the independence of the estimation of the explicit plant and parameters; however, it tends to be conservative. In the subsection, two fault tolerant controllers (with and without the model-based controller) are formulated based on the time delay control.
Substituting the model-based controller (25) into (19), we can rearrange the nominal control input of the flexible satellite as

where

where (*˜) = (*)-(*̂)
The defined variable vector
where T is the control update period.
To achieve the reference model (23), the fault tolerant controller can be formulated as (32) according to (29)

Finally, two fault tolerant controllers are proposed for uncertain flexible satellites. The first is based on the time delay control theory without considering the satellite dynamics; the second combines the benefits of the model-based control and the time delay control theories, and it can tremendously reduce the conservativeness and enhance the pointing accuracy.
Fault Tolerant Controller One:

Fault Tolerant Controller Two:

The term ω̇ibb(t-T) of the fault tolerant controllers can be computed by [1]

5.3 Stability Analysis
Based on the results from previous literature [1,23], the stability analysis and condition limitations are described with some extensions. In order to avoid redundancy, only the novel fault tolerant controller (Controller Two) is employed in this subsection, and the analysis procedure of Controller One can be derived with a few modifications.
Substituting (34) into (19), the closed-loop dynamics of the satellite can be written as

The following equation is satisfied using (19)

Substituting (37) into (36), (36) can be rearranged as (38).

The following conditions can be satisfied by choosing an appropriate T






Therefore, the resulting equation can be derived from (38)

According to the stability theorem for discrete systems, the stability condition of ω̇ibb(t) can be obtained if

then

Substituting (42) into (38), we can obtain

According to (42), (43) can be further rearranged as


6. Simulation
The performance of the innovative fault tolerant controller (Controller Two) is verified by comparing it with the conventional PD controller and the simplified fault tolerant controller (Controller One) with the following characteristics. The orbital rate ω0 is 0.0011 rad/s; orbital altitude is 500Km; wheel inertia Jw is 0.0026 kgm2; viscous friction constant ρv is 0.000038 Nm s/rad; the saturations Ω
w_lim
and τu_lmi are chosen as 2500 rpm and 0.05 Nm, respectively; the control update period is chosen to be T = 0.1s. The initial status and the desired attitude of the satellite are chosen as


The gain parameters of the PD controller and the two proposed controllers are given as ξc = 0.707, ωn = 0.11, τ1 = 50, and τ2 = 5.
6.1 Faulty Condition of the Rigid Satellite
In this case, the satellite is assumed to be rigid. The uncertain parameters of the moment-of-inertia and actuator faults, which are not available in the controller design and are merely employed to verify the control scheme, are chosen as


The time responses of the angular velocity error, quaternion error, and wheel velocity are given in Figure 1a, 1b, and 1c, respectively. The conventional PD controller can obtain a satisfactory response under fault-free conditions, which can be seen from the 0 s-300 s in Figure 1. After 300 s, each actuator suffered a partial or complete loss of control command, and some of them even experienced additive fault commands, which can be seen from (50) and (51). In Figure 1, the PD controller resulted in an unstable status, while the proposed controllers did not show any degradation of performance after 300 s. Moreover, the two proposed controllers provided similar performances in spite of unknown faults, space disturbances, and the inertia uncertainties. Furthermore, the fourth wheel suffered a complete control failure after 300 s; as such, it converges to the static state under the influences of the wheel friction, as is shown in Figure 1c.

Faulty condition of the rigid satellite tracking error and wheel velocity results
To further analyse the influence of faults, the command torque and the actual torque curves are given in Figure 2. There are obvious differences between the PD controller and the proposed controllers after 300 s. The other two proposed controllers can immediately compensate for the effects of the multiple faults, while the PD controller was not capable of fault tolerance.

Faulty condition of the rigid satellite_command torque and actual torque results
6.2 Faulty Condition of the Flexible Satellite
In this subsection, the flexible appendage dynamics is analysed to verify the effectiveness and performance of the novel proposed controller (Controller Two). As the PD controller cannot obtain satisfactory responses in faulty conditions, only the other two proposed controllers are compared in this situation. Here, the natural frequencies and damping ratios of the flexible appendages are given by


To compensate for the influence of the flexible appendage dynamics, its estimated parameters are formulated as follows


Time responses of the angular velocity error, quaternion error, wheel velocity, and vibration displacement are given in Figure 3a, 3b, 3c, and 3d (enlarged partial views are shown in the figures), respectively. It can be seen from Figure.3 that the novel fault tolerant control law can manage to tolerate the fault and the flexible dynamics, and achieve attitude stability in about 300 s. However, through analysis of the fault and flexible dynamics at the same time, we found that the proposed Control Law One can result in an unstable status. Moreover, in the fault-free period (0 s-300 s), although the desired position can be achieved by the proposed Controller One (Figure 3b), there exist severe oscillations of the angular velocities (Figure 3a), which further inspire the elastic vibrations (Figure 3d). Furthermore, the novel fault tolerant control law (Controller Two) can suppress the vibration disturbances in about 200 s; however, Controller One inspires considerable vibration disturbances which degrade the system performance, as can be seen from Figure 3d. After 300 s in the simulation, the performance of Controller Two is significantly better than that of Controller One.
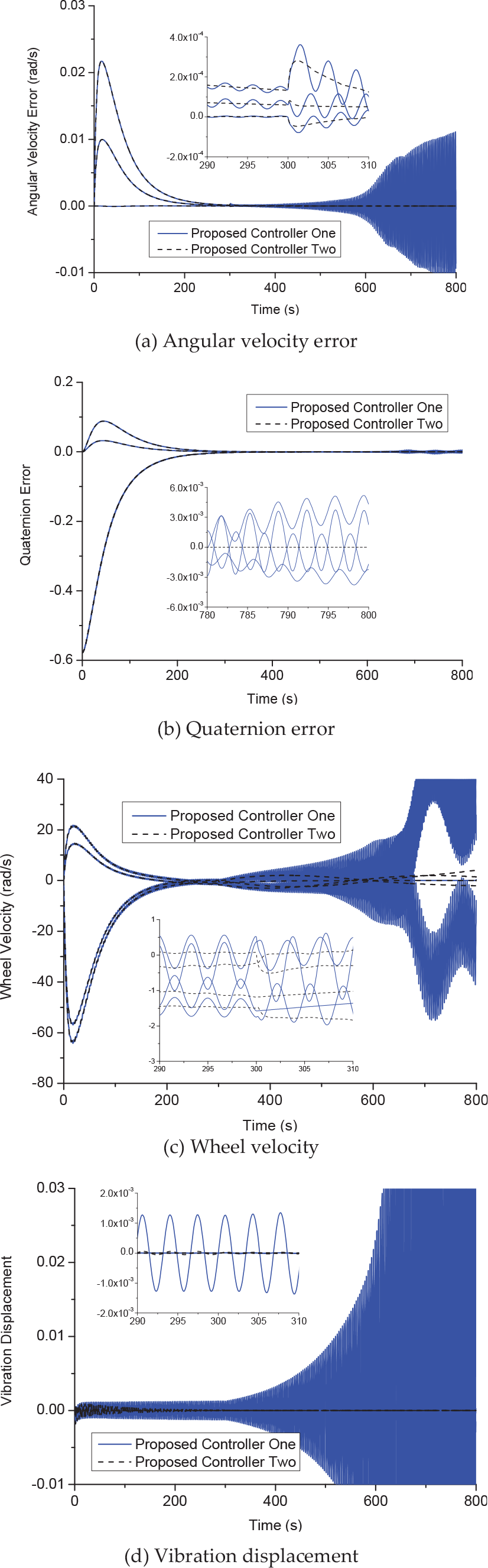
Faulty condition of the flexible satellite
Compared with Controller One, the principal contribution of Controller Two is that it can enlarge the time update period T, which causes the difference in the tracking performances, as shown in Figure 3. To further quantitatively analyse the improvement of Controller Two over Controller One, the improvement of the stability condition is listed in Table 1.
The Improvement of Stability Condition
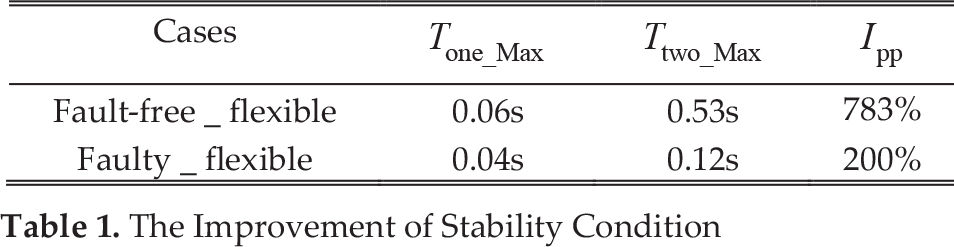
The improvement index Ipp is defined by
where Tone_Max and Tone_Max represent the maximum values that can satisfy the stability conditions.
7. Conclusion
A novel fault tolerant control law is proposed for uncertain flexible satellite attitude control in the presence of space disturbances, reaction wheel dynamics, moment-of-inertia uncertainty, actuator faults uncertainty and flexible appendage dynamics. The fault diagnosis process is not required in the novel controller design and the computed torque is employed to enhance the robustness and accuracy. Comparisons of simulation results with the PD controller and a simplified fault tolerant controller verify the advantages of the novel fault tolerant control law.
Compared with that of the simplified fault tolerant control, the stability condition (control update period constraint) improvement of the novel fault tolerant control law in the fault-free and faulty conditions for the flexible satellite can be up to 783% and 200%, respectively. Moreover, the proposed method can be extended to other nonlinear systems with some modifications.