
Abstract
The “hand in hand” approach has been validated as effective in human motor skill training, such as handwriting, drawing, driving and so on. This paper proposes a networked haptic interaction system to simulate the “hand in hand” training scheme for tank gunnery which requires tank gunners to complete tasks accurately and quickly. In the haptic-based training system, a network connecting two haptic devices plays the role of putting hands together, based on which the algorithms of haptic guidance and correction in real-time are developed for skill transmission between experts and trainees. The manner in which the traditional spring-damper model plays a role for high speed and high precision skill training is focused upon, since accuracy and operating speed are both critical in tank gunnery. An unbalanced spring control scheme is presented to benefit experts in accurately regulating trainees' operations without considering whether trainees are obedient in doing so.
Keywords
1. Introduction
Haptic feedback has been applied to human motor skill training, which can provide benefits over visual-only displays in such fields as surgery [1], assembly [2], rehabilitation [3], motor skills [4] [5] and so on [6]-[10]. Various haptic guidance paradigms for human skill training have been proposed, which include virtual fixture, virtual teacher, shared control schemes and the record-play approach.
L. Rosenberg [11] proposed the concept “virtual fixture” in order to keep subjects away from forbidden areas in a virtual environment. J. J. Abbott [12] would exert forces to stop novices from deviating from an expected trajectory. The approach “virtual teacher” was proposed by R. Brent Gillespie [13] whereby trainees could learn exactly what an expert did by replaying the recorded information of the expert's motion. Rodolfo Prada used virtual fixture in path-following tasks for cutting [14]. Marcia K. O'Malley [15] [16] proposed a shared control scheme to give a gradually changed guidance force based on the performance of a trainee so as to induce the expected motion. Recently, Jaebong Lee proposed haptic disturbance in that a disturbance in the force was given as an error magnification to participants instead of guiding them [17]. This approach needs further verification from human psychology experiments. Bayart et al. developed a four-step method for teaching and training with an adaptive haptic guidance software module [18].
Among these haptic-based training paradigms, the most common form is virtual fixture, which assists a user in moving a manipulator along desired paths or else prevents the manipulator from entering forbidden regions of its workspace. Another useful approach is haptic guidance, which can guide a user to experience an ideal practice by lightly holding the stylus of a haptic device.
Haptic-based training schemes obey the law of human skill growth [19] [20]: skill learning, skill practice and skill correction. Firstly, a subject watches videos to understand what he will learn. Secondly, by using the haptic guidance approach, the subject is physically guided through an ideal motion by a haptic interface, thus giving him a kinaesthetic understanding of what is required. Finally, the subject actively manipulates the haptic device to trace the ideal path. Based on the virtual fixture method, the haptic device can be controlled to exert force and to regulate the trainee's operation if they cannot match the ideal motion.
For the training process introduced above, a computer is considered as an expert and should be trained in advance. Can an expert replace a computer to implement skill transmission between a trainee and himself which originates from the “hand in hand” training approach for handwriting (Figure 1)?

The “hand in hand” training approach for handwriting
The “hand in hand” skill training scheme has been validated to be effective in handwriting [21], drawing and other hand motion skills. During the training process, a teacher and a student are required to firmly connect their hands. After the teacher actively moves his hand to enable the student to passively feel and learn the teacher's hand motion, the student moves his hand actively to complete the same training task, which is passively supervised by the teacher. The teacher can actively correct the trainee's hand motion when an incorrect operation is detected.
By using the “hand in hand” approach, a student can not only experience the ideal hand motion of a teacher, but they can also be corrected by him in real-time, which meets the requirement of human skill growing: experience, practice and correction.
It is nearly impossible for two people to put their hands together to complete most tasks, since the operating environments will not permit them to connect their hands from beginning to end, thereby limiting the application of the “hand in hand” training method. In order to overcome the limitations of “hand in hand” training, some researchers [22] [23] have attempted to develop networked haptic interaction systems to simulate “hand in hand” skill training. A network connecting two haptic devices plays the role of putting hands together and supports two users in implementing skill transmission based upon haptic algorithms.
The theory of networked haptic interaction can meet the requirements of “hand in hand” skill training; however, some problems need to be solved in order to achieve good training results. The spring-damper model, together with a PD control scheme, is the most useful algorithm for skill training, based on which researchers have made efforts to improve the accuracy of haptic-based skill training. Whether the spring-damper model is suitable for high speed skill training has not yet been discussed. For example, tank gunnery requires a gunner to manipulate a tank turret to quickly and accurately aim at a target. Tank gunners should be trained to complete the most accurate manipulation in the shortest time.
Another problem will appear when a trainee is not obedient to an expert and where they resist him in the process of correction in real-time. During the process of a trainee's active practice, an expert can supervise his operation and exert force to regulate his operation when the wrong manipulation is detected. If the trainee resists the instruction from the expert, the spring-damper model used here will result in a tug-of-war between the expert and the trainee. The timing for the trainee to grasp the right behavioural essence is lost. In a single-version haptic training system, a computer – which is considered as an expert – cannot be influenced by trainees. For a networked training system, special schemes should be proposed to guarantee an expert obligatorily correcting a trainee's operation without resistance from the trainee. The hand motion of a trainee should be corrected without considering whether he is willing to accept the instruction.
To overcome the limitations of a networked haptic interaction system for skill training introduced above, the spring-damper model is specially focused in order to implement high speed and high precision human motor skill training. An unbalanced spring model is developed for experts to correct a trainee's hand motion without resistance. A prototype system for tank gunnery skill training is developed, and experimental results can demonstrate the proposed schemes and analysis.
2. Networked haptic interaction to implement “hand in hand” skill training
The “hand in hand” training approach for handwriting is illustrated in figure 1. By firmly connecting hands with the teacher, the child can not only passively experience the teacher's hand motion for handwriting but they can also be corrected by her during the process of active practice.
Figures 2 and 3 show the theory and signal flow of a networked haptic interaction system to simulate “hand in hand” training. Two haptic devices connected by a network play the role of putting hands together. User A can manipulate device A to control device B in order to exert force on user B. If user B lightly holds the stylus of device B and does not apply any pressure, he will feel the active movement of device B, which is also the hand motion of user A, while user A will not feel any resistance. If user B also actively manipulates device B simultaneously, both user A and user B will feel resistance through haptic devices, which is defined as direct human-to-human interaction.

Networked haptic interaction system to simulate “hand in hand” training
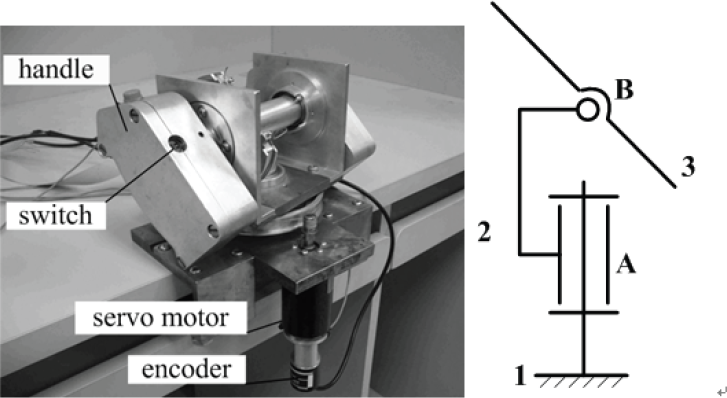
Two-DOF haptic device for tank gunnery skill training
The phenomenon of networked haptic interaction introduced above is the same as that of a “hand in hand” approach in the physical world. Obeying the rule of “hand in hand” skill training, the whole training process can be decomposed into two related phases: haptic guidance and correction in real-time (supervising and regulating), which requires a trainee and an expert to alternately manipulate haptic devices actively (table 1).
Two phases of haptic-based skill training to simulate a “hand in hand” approach

During the phase of haptic guidance, a trainee lightly holds the slave device to keep it absolute passive and is physically guided by the hand motion of an expert. The expert actively manipulates the master device and enables the slave device to have the same motion as the master device. The trainee remains passive and the teacher is active.
During the phase of correction in real-time, the trainee actively manipulates the slave device to independently complete a training task while the expert remains passive to evaluate his operation during the supervision phase. When an error occurs, the expert has to switch his state so as to actively correct the manipulation of the trainee by applying force on the master device. The essence of correction in real-time is that an expert can manipulate the master device to control the slave device in order to exert force on the trainee to influence and regulate his operation. In this case, both the trainee and the teacher are active and can manipulate the devices actively. The trainee is required to regulate his operation based on the force feedback representing the instruction from the expert.
3. Tank gunnery skill training
3.1 Haptic device
Figure 4 shows the two-DOF impedance-type haptic device which has been specially designed as the tank turret console for novices to simulate tank gunnery. Tank gunners control its pitch and roll rotations to aim at an enemy target by watching it through a line-of-sight aiming system simulated by a computer (Figure 5). The angular speed of the tank barrel's rotation is proportional to the roll and pitch angles of the turret console from the original positions. Such aiming at a target can be expressed as:

The line-of-sight aiming system of tank gunnery

Tank gunnery in aiming at a target

where Sc (Sxc Sc y) is the aiming mark controlled by the gunner and Se (Se x Sye) is the target observed from the line-of-sight system in figure 5. The moving speed of the aiming point is proportional to the rotational angle of the turret:

From the line-of-sight aiming system, the position of the aiming mark can also be calculated as:

where L can be seen in figure 5, θHandle (θx θy) is the rotational angle of the device's stylus, its initial angle is θo (0 0) and Kv represents the proportional coefficient.
Figure 6 shows perfect tank gunnery in aiming at a target, which meets the requirement that a tank gunner should manipulate the turret console to accurately aim at an enemy target as quickly as possible. The regulation includes:
An in the line-of-sight aiming system: the aiming track from the original position to the target should be a straight line, not a curve.
An in the line-of-sight aiming system: the aiming mark should reach the target without repetition.
Completing the tank gunnery in the shortest time.
3.2 Problems for tank gunnery skill training
It is extremely difficult for a novice to become an excellent tank gunner, possessing high precision and high speed tank gunnery skills. The reason why tank gunnery is so complicated to grasp can be understood as follows:
Tank gunners have to complete the most accurate operation in the shortest time.
The angular speed of the barrel's rotation is proportional to the roll and pitch angles of the turret console; therefore, tank gunners should simultaneously control the roll and pitch angles in order to guarantee the aiming point moving along a straight line.
Tank gunners should correctly manipulate the turret console during acceleration, constant and deceleration phases; otherwise, the aiming mark moves repeatedly around the target and cannot reach the target directly.
Figures 6 and 7, respectively, indicate successful and unsuccessful tank gunnery operations in aiming at a target. Based on the relation between the aiming trajectory and the rotational angles of the turret console, the core content of tank gunnery can be summarized as quickly rotating the handle to a roll angle and a pitch angle to keep the aiming point moving along a straight line and accurately adjusting the pitch angle and roll angle in real-time to accelerate or decelerate the angular speed of the barrel's rotation to reach the target directly. Controlling the angle θHandle (θx θy) and grasping the timing to regulate the movement speed of the aiming point are critical for tank gunners in mastering the skill.
3.3 “Hand in hand” training approach for tank gunnery skill training
In the physical world, an expert and a gunner cannot put their hands together to manipulate one tank turret. Therefore, a networked haptic interaction system is developed to simulate “hand in hand” training for tank gunnery. The whole training process is decomposed into haptic guidance and correction in real-time.
During the phase of haptic guidance, a teacher manipulates a master device to actively complete a task while a trainee passively experiences his hand motion by lightly holding the lever of a slave device. The trainee can learn how to control the tank turret and when to regulate his hand motion while aiming at different targets.
During the phase of correction in real-time, the expert can supervise the active practice of the trainee. When an incorrect manipulation is detected by the expert, he will immediately manipulate master device to regulate the hand action of the trainee. A push button on the master device (Figure 4) is designed for experts to switch between a passively supervising mode and an actively correcting mode. Novices can be stimulated through force feedback in order to seize the timing and successfully adjust his operation.
4. Haptic algorithms
Haptic algorithms must be created to implement the functions of haptic-based “hand in hand” skill training. A haptic guidance algorithm should guarantee that a slave device is smoothly controlled by a master device and has the same movement as the master device in real-time. Accurate skill transmission should be implemented between an expert and a trainee. The algorithm for correction in real-time should benefit experts in regulating the hand motion of a trainee effectively without considering whether the trainee is obeying his instructions. For a trainee, the force feedback -representing the instruction from an expert – should teach him when to adjust his hand motion and how to adjust it while aiming at a target. Any mistake appearing during the active practice process on the part of the novice should be timely and exactly corrected by the expert.
4.1 Haptic Guidance
Figure 8 indicates the theory of the haptic guidance algorithm. The traditional spring-damper force model is used to compute the exerted force Thandle (Txhandle Tyhandle) of a slave device which can push or pull the slave device lever to a target position.

Frameworks of haptic guidance (above) and real-time signal transmission
During the phase of haptic guidance, the aiming point of the slave device Ssc should accurately reach a target position, namely the current aiming mark of the master device Smc at each sampling period of the haptic loop. From the line-of-sight aiming system, if the aiming points of the two devices are not the same, the slave device is controlled to exert force:

where K is the spring stiffness and B is the damping coefficient. The parameter e(ex ey) can be calculated:

When an expert remains passive to supervise the operation of a trainee, the parameter e(ex ey) should be computed as:


Eq. (7) is used to compute the parameter ė and T is the sampling period of the haptic loop. For haptic rendering algorithms, a damper model more easily results in a haptic device's oscillation in that the velocity computation experiences an error to produce a pulse force signal. In order to filter the random pulse signal, a force filter approach is proposed:


where Tsend is the force signal sent to the motors for the current period, Tcurr is the force computed by the proposed model for the current period and Tprev is the exerted force for last period. Tdelta is the threshold value for the exerted force change in value between two neighbouring sampling periods. Vmax is the maximum operating speed of the expert and T is the sampling period of the haptic loop.
From Eq. (9), it can be seen that the value of Tdelta is set as the spring force caused by its maximum deformation when the spring stiffness has been decided. Eq. (9) will be explained in detail in the next section of the experiment.
From figure 8, a constant force Tcom is required to compensate the friction and moment of inertia; therefore, the exerted force of the slave device is:

4.2 Correction in real-time
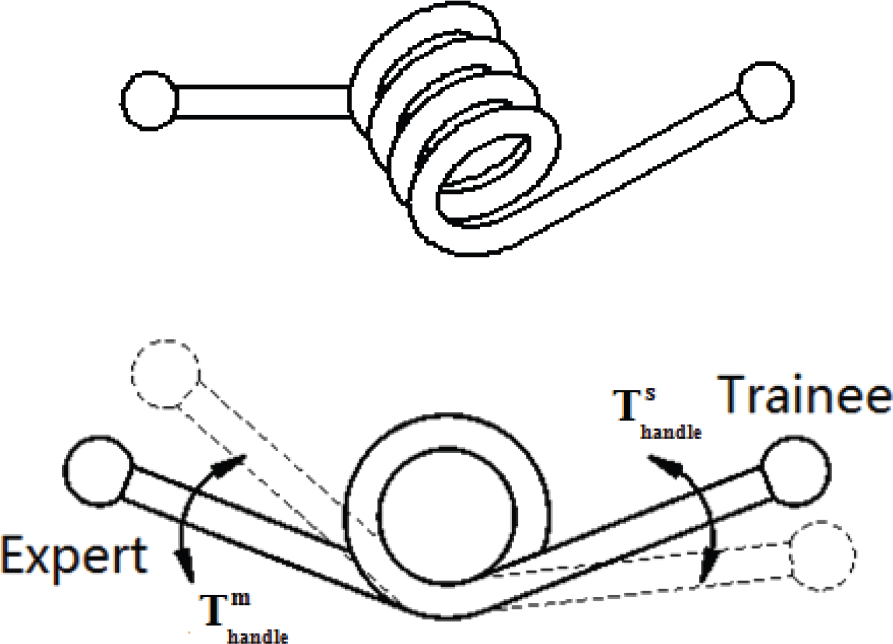
When an incorrect operation of a trainee is detected by an expert, the expert actively manipulates the master device in order to correct the hand motion of the trainee; both the expert and the trainee are active, which is defined as direct human-to-human interaction. The phenomenon can be described in that two users exert forces on two sides of a spring in order to push or pull it simultaneously. When the aiming points of the two devices have the same position from the line-of-sight aiming system, the spring connecting the two devices retains zero deformation. Each of the users on the two sides of the spring can exert forces to deform the spring.
The expert exerts force on one side of the spring to deform it while the trainee on the other side of the spring will feel the spring's force which can benefit him in regulating his hand motion. If the trainee adjusts his hand motion back to the ideal operation based on the force feedback, the expert will stop regulating the trainee and switch his state back to supervising.
The goal of correction in real-time is to exert effective force feedback so as to instruct trainees in regulating operations and grasping the essence of a motor skill. Trainees should obey the instructions from experts; however, if a trainee does not obey the training rule and is stronger than the expert, the operation of the expert is contrarily influenced by the trainee since the balance spring is used. From figure 9, both the trainee and the expert have the same right to deform the spring and can feel the same spring force.
The phenomenon of correction in real-time
In order to solve this problem, the unbalanced control of the spring is proposed in Eq. (11)–(13):



where Tmhandle is the resistant force exerted by the master device, Tshandle is the resistance force exerted by the slave device and p is the proportional coefficient.
From figure 10, if the coefficient Km is set to zero, the same deformation of the spring connecting the two devices exerts different forces to the trainee and the expert. The resistance felt by the expert remains zero and the resistance felt by the trainee is much larger than that felt by the expert. When the resistance felt by the trainee becomes large enough based on the spring's deformation, the trainee cannot resist the exerted force of the slave device and will be forced back to the correct manipulation.

Theory of unbalanced spring control for correction in real-time
Figure 11 shows the whole process of supervising and correcting in real-time. When an incorrect operation of the trainee is detected, the expert manipulates the master device to deform the spring so as to pull the trainee back to the right path. The controlling slave device ability to quickly exert a large force is the critical factor in implementing the haptic-based “hand in hand” skill training to regulate a trainee timely and effectively. The training effect of an unbalanced spring control will be discussed in the next section, based upon the experimental results.

The phenomenon and theory of correction in real-time
4.3 Experiment
A prototype of a tank gunnery skill training system has been developed to implement the function of a “hand in hand” training approach whereby a trainee can not only experience a teacher's hand motion during the process of haptic guidance but also be corrected by the expert in real-time during the phase of active practice. From figure 12, the prototype system is built based upon two identical haptic devices that have been specially designed for tank gunnery skill training. The two devices are connected to two computers communicating with each other through a small local network using UDP/IP as the communication protocol. The frequency of haptic rendering can reach 1000 Hz since networked delay and related problems are all eliminated.

A “hand in hand” training system with a virtual environment for tank gunnery skill training
During the phase of haptic guidance, the motion consistency whereby the two devices have the same movement from beginning to end is focused upon. The above defined parameter e in Eq. (5) is used to examine the motion consistency for the whole process of training. The smaller that e is, the higher the precision is. In particular, for motor skill requiring a very fast operating speed, the relation between accuracy e and the spring-damper model should be constructed based upon the experimental results. For correction in real-time, whether the unbalanced spring control model can benefit experts in correcting trainees' manipulations needs to be analysed.
4.4 Haptic guidance
An expert actively manipulates the master device to complete a training task by watching the computer-simulated line-of-sight aiming system while a trainee lightly holds the stylus of the slave device to passively feel its motion while watching the same virtual environment. After the parameters K and B of Eq. (4) are set, the parameter Tdelta of Eq. (9) can be computed based upon the required maximum operating speed. Figure 13 indicates the experimental data regarding the relation between the parameter e in Eq. (5), the spring stiffness and the maximum operating speed, while the damping coefficient is set to 3000 mNms−1/mil. The experimental results illustrate that:

Relation between the training effect and the user's operating speed based upon different spring-damper model coefficients
A faster operating speed leads to a larger error between Ssc and Sc m if the spring stiffness is identified.
A higher spring stiffness leads to a smaller error between Ssc and Smc if the maximum operating speed is identified.
The damper is only used to keep the device stable and the variation of the damping coefficient has no obvious effect on improving the accuracy of parameter e.
The proposed force filter approach is critical to keeping the haptic device stable, which can eliminate nearly every pulse force signal (Figure 16).
Eq. (14) and figure 14 can explain the phenomenon shown in figure 13. From figure 14, the yellow ball (Mass m) representing the slave device is guided by the master device (the red ball). The haptic guidance can be described as the yellow ball being pulled to reach a series of the positions of the red ball (aiming marks) while a spring connects its current position and target position at each sampling period. Based upon the theory of energy conservation, Eq. (14) should be required:
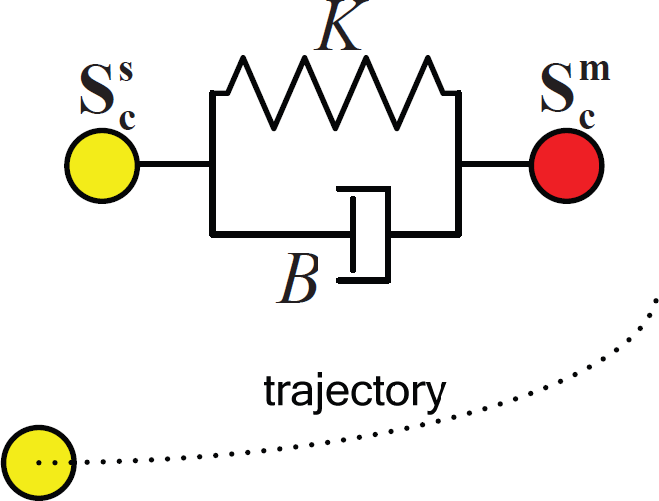
The theory of haptic guidance based upon the spring-damper model

where xi is the spring deformation and vci is the moving speed of the yellow ball. The two balls have the same original position and the initial deformation of the spring is zero. It is clear that improving the playing speed and reducing error based upon one spring is a contradiction. A faster operating speed with a smaller error can only be reached by improving the spring stiffness k. For a haptic device, the maximum simulated stiffness is decided by its design, not by algorithms; therefore, a device with a larger stiffness can benefit trainees in experiencing more accurate hand motion during haptic guidance.
For each stage of the process of the experiment, the damping coefficient is set to 500, 1,000, 1,500, 2,000, 3,000, 4,000 and 5,000 mNms−1/mil; the results show that a damper cannot influence the relation between speed, error and spring stiffness and that it has no obvious effect on accuracy improvement.
Figure 15 indicates the aiming trajectories of the slave device when the expert manipulates the master device to complete the same task at different operating speeds. The different errors shown in figure 15 demonstrate that a faster operating speed leads to a larger error between Sc s and Sc m if the spring stiffness is identical.

Effect of haptic guidance with variable spring stiffness
For the designed haptic device, the maximum simulated stiffness is about 200 mNm/mil. Table 2 indicates the best training effect for tank gunnery when the spring model is set to the maximum stiffness. Figure 17 shows separately the device angles and aiming tracks of the master device and the slave device based on the best experimental results.
Specifications of the tank gunnery training system

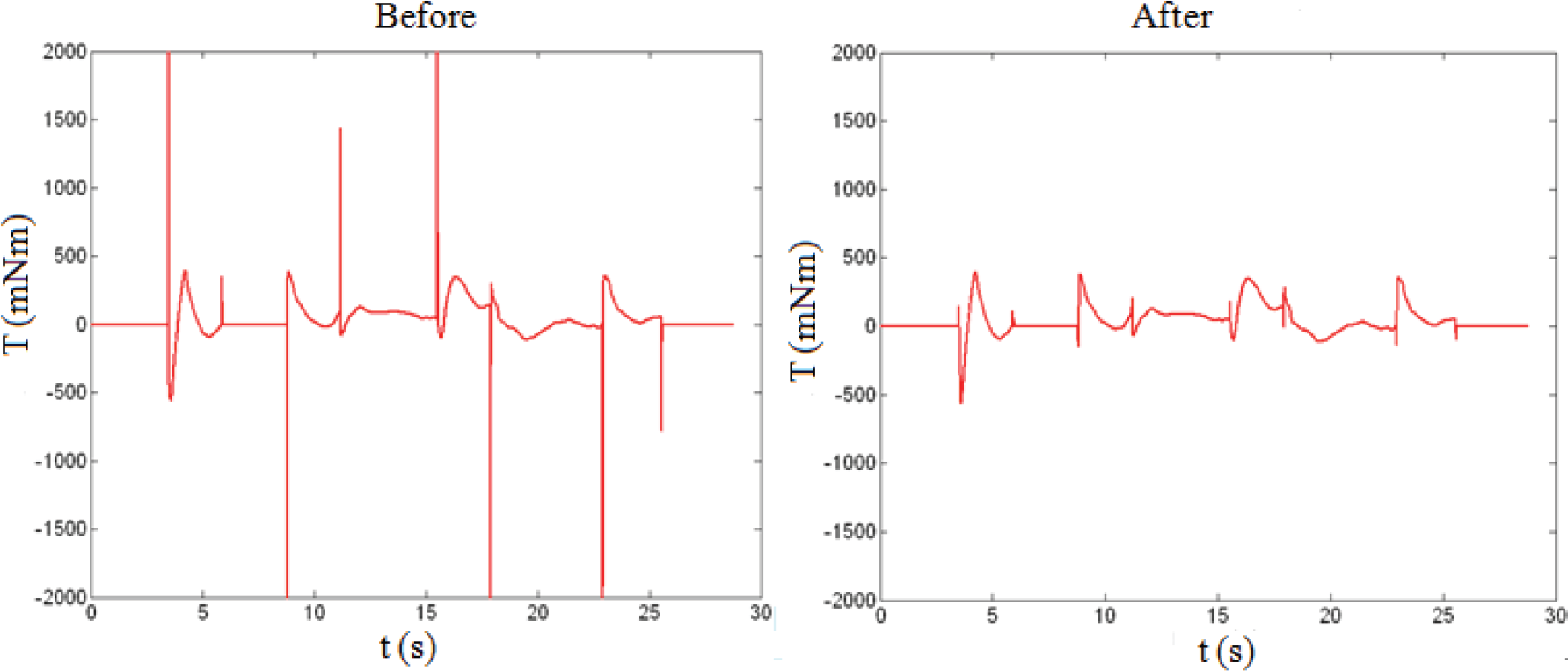
The effect of a force filter approach in eliminating pulse signals

Separately displaying the error of the device angles and the aiming tracks
Tanks are used to attack remote targets at a distance of about one kilometre while a six-meter-long enemy tank which is one kilometre away appears as a six-mile-long target in the line-of-sight aiming system. When the gunner aims at the centre of the enemy tank, a maximum aiming error of three mil in the line-of-sight aiming system can be endured to destroy the target and the error upper bound for tank gunnery can be set to be three mil, since most tanks are about six meters long. Therefore, the developed training system based upon the specially designed haptic devices can meet the requirements for tank gunnery skill training.
4.5 Correction in real-time
From figure 18, when an incorrect operation of the trainee is detected at the moment (ta) during the process of supervision, the expert immediately corrects his manipulation back to the ideal by manipulating the master device. The time tb-ta is spent in regulating the manipulation of the trainee by the expert. The shorter the that time spent is, the better the training effect that the system can achieve. It can be observed from figure 18 that for an ideal correction the maximum error of the aiming track happens at the moment when an incorrect operation of the trainee is detected. Therefore, the trainee can not only grasp the timing so as to know what is wrong with his operation but so too can he be corrected back to the correct operation in real-time.

The difference between the ideal correction and the real correction
The training effect based upon the unbalanced control can be seen in figure 19. In the experiment, it is difficult to implement the ideal training effect shown in figure 18. From Figures 18 and 19 is can be seen that a trainee can continue his incorrect operation even if it has been detected by the expert. Only when the spring connecting the two devices is deformed enough to enable the slave device to exert a large enough force to influence the operation of the trainee will the trainee be gradually pulled back to the right manipulation, which also requires his obedience.

The training effect of correction in real-time for depicting a virtual envelope
Figure 18 shows the relation between the model coefficients and the maximum deformation of the spring connecting the two devices. An output force of 1 Nm can obviously and effectively affect the manipulation of a trainee and guide him back to the right operation. The maximum simulated stiffness of the device is 200 mNm/mil; therefore, the maximum deformation of the spring connecting the two devices can reach 5 mil, which is demonstrated by the experimental results (Figure 20). By using the unbalanced spring control approach, the manipulation of the expert cannot be influenced by the trainee.

The relation between spring stiffness, the damping coefficient and the max offset of the two devices
If the unbalanced spring control scheme is not used, the extreme phenomenon appears in the experiment whereby the trainee and the expert resist each other by applying forces on their devices and keeping the two devices still. The prototype becomes a virtual tug-of-war and ceases to function as a skill training system since the spring connecting the two devices maintains the largest deformation. If the spring stiffness is set to 200 mNm/mil with a suitable damping coefficient, the maximum error is smaller than 5 mil in using the specially designed devices, which can meet the requirements of tank gunnery skill training where the aiming track error cannot be larger than 6 mil.
For haptic guidance or other haptic-based skill training approaches, the basic requirement is that the used haptic devices should be capable of simulating a large stiffness. For different training tasks, specially designed devices are necessary in improving training performance. The stable simulation of a large stiffness is more important than the development of haptic algorithms.
4.6 Training effect
Fifteen Subjects were required to manipulate the specially designed haptic devices to complete tank gunnery skill training (depicting a computer-simulated envelope target) based upon the proposed system under two conditions: visual feedback only and haptic-based “hand in hand”. A virtual envelope depicting the tank gunner's basic skill is the most fundamental training content for novices (Figure 21). The participants – including eight men and seven women – were recruited to participate in this study on a voluntary basis with no monetary compensation. None of the participants were familiar with tank gunnery, while one first-rank specialist was invited to play the role of the expert in the experiment.

A trainer and a trainee cooperate to complete tank gunnery with the introduction of the envelope depicting the operation
Table 3 introduces the operating accuracy and operating speed after the same period of practice based upon the two different approaches. It is clear that those trainees developed by the haptic-based “hand in hand” training approach saw much better skill improvement than those novices who practiced by using other methods.
Comparing the training effect under two conditions: visual feedback only and haptic-visual feedback

Five of the fifteen participants who took part in the experiment of visual feedback only training also experienced cooperative training with the same expert. All of them declared that they preferred “hand in hand” training over the traditional visual feedback only training scheme. The expert could guide them to active regulate hand motions through the output force, which benefits them more in relation to grasping the skill than oral teaching does. The haptic-based “hand in hand” training paradigm can not only drive novices to passively accept the skill but it can also support them in actively grasping the skill by perceiving it.
5. Conclusions
A networked haptic interaction system to implement “hand in hand” human motor skill training for tank gunnery was built and introduced in this paper. Two training modes: haptic guidance and corrected in real-time were implemented, which satisfies the rule of human skill growth: learning, practice and correction. In haptic guidance, a spring-damper model with a force filter approach is presented to accurately implement skill transmission, which requires a very high operating speed. A theory of a spring-damper model for active guiding is proposed and verified based upon the experimental results. An unbalance spring control scheme is proposed for experts to regulate trainees who are not obedient to their instructions. Specially designed haptic devices with high output stiffness are required for different training tasks.
Additional subjects will be invited to participate in the experiment in order to validate the effectiveness of the proposed training system and paradigms for tank gunnery. A new haptic device with higher output stiffness will be designed for tank gunnery skill training. An ideal training effect is expected to be acquired in future work.
Footnotes
6. Acknowledgements
This research was supported by the National Science Foundation of China under grant number: 60803070.