
Abstract
This study develops a novel method for learning mechatronics using remote monitoring and control, based on a programmable logic controller (PLC) and WebAccess. A mechatronics module, a Web-CAM and a PLC were integrated with WebAccess software to organize a remote laboratory. The proposed system enables users to access the Internet for remote monitoring and control of the mechatronics module via a web browser, thereby enhancing work flexibility by enabling personnel to control mechatronics equipment from a remote location. Mechatronics control and long-distance monitoring were realized by establishing communication between the PLC and WebAccess. Analytical results indicate that the proposed system is feasible. The suitability of this system is demonstrated in the department of industrial education and technology at National Changhua University of Education, Taiwan. Preliminary evaluation of the system was encouraging and has shown that it has achieved success in helping students understand concepts and master remote monitoring and control techniques.
1. Introduction
System integration and mechatronics automation are rapidly moving toward remote monitoring via the Internet, which reduces the human resources required to monitor mechanical functions in factories. With the rapid development of global information technology, an increase in the number of computer users, the maturation of industrial communications technology and improvements in technologies associated with the monitoring system and smart electronic devices, many companies now offer monitoring systems with a wide range of functions. Advantech WebAccess is the first software program based on the human machine interface (HMI) with supervisory control and data acquisition (SCADA) incorporated into browsers [1]. Saygin and Kahraman [2] presented a web-based PLC (programmable logic controller) laboratory for manufacturing engineering. Mougharbel et al. [3] evaluated and compared various remote access laboratory installations around the world. Hui et al. [4] have suggested that instructors should consider the target knowledge when considering technology-assisted learning alternative options or designing a web-based course.
The widespread use of the Internet increases the need for web-based applications for distributing searching and exchanging information to support various activities [5]. The ability to connect to the Internet anywhere favours a redefinition of the internal processes of an industrial automation, such that the physical boundaries are extended. Web Access offers a number of advantages for remote monitoring systems over conventional structures, such as eliminating the need for an additional server system. In this manner, WebAccess saves time when establishing a system, making it possible to immediately conduct monitoring tests over the Internet. Monitoring accuracy requires a visual monitoring system equipped with cameras capable of transmitting images instantaneously and Web-CAM provides an ideal solution.
The laboratory allows users to operate experiments while collecting physical data from a remote location, which are displayed on a computer screen via a network connection. Web-based learning technologies can also be applied to general remote control systems in many research and engineering areas. An increasing number of human interface systems are being implemented at all levels of education to support teachers. In addition to promoting instructional flexibility and permitting the incorporation of new educational resources, web-based learning familiarizes students with computers as a learning tool [6]. Web-based learning modules used in manufacturing and robotics courses, such as robotics modules and a senior design project, are presented by Radharamanan and Jenkins [7]. Engineering education requires substantial laboratory work that is often costly and rapidly becomes obsolete. Therefore, laboratory experiments have major economic implications for engineering education.
Through the use of a mechatronics module, this study uses Internet connectivity using a web server to manipulate various databases. Increasing the number of engineering and monitoring locations connected to the Internet would enable the integration of peripheral resources to gradually expand the structure of remote monitoring systems. Remote systems developed in previous studies [8-10] require additional web servers that are difficult to maintain and lack direct access to core data because remote monitoring systems are additional web pages. By contrast, the architecture proposed in this work is web-based and all required functions can be realized directly on the web.
Web-based learning systems can serve as incentives for university faculties to teach distance education courses [11]. Gadzhanov and Nafalski [12] reviewed the pedagogical effectiveness of distance education, with a special focus on remote laboratories for measurement and control. Machotka et al. [13] proposed the remote laboratory NetLab at the University of South Australia. NetLab was first developed as a learning environment that enables students to cooperate while conducting remote experiments, domestic and international, via the internet. Herrera and Fuller [14] presented a model for the implementation of remote experimentation laboratories in a distributed collaborative scenario, focusing on two crucial key elements: shared knowledge and interaction for collaboration. Yang et al. [15] developed a computer-based online learning module to help engineering undergraduates comprehend difficult concepts. That study also reported on the perceptions of students with regard to online learning.
WebAccess is a powerful piece of graphical monitoring software, capable of designing and constructing a multifunctional human interface and can be used for data collection, trend alert processing and reporting systems. The animated operational interface is configurable using mechatronics equipment and controllable input/output (I/O) devices, providing a number of graphical tools for user convenience. An automatic control system based on WebAccess software for intelligent buildings, in which an energy system is used to improve working and enable distributed control and centralized management of buildings was presented [16].
The integration of the Internet into engineering education is generally achieved in the following ways. (1) Websites provide various online functions and facilitate the management of experiments. (2) physical equipment is replaced by equipment in remote laboratories. (3) web-based laboratories enable students to set parameters and operate equipment from remote locations. This aim of this study was to achieve a better understanding of the perceptions of engineering undergraduate students on educational technology in general and web-based learning in particular. This study makes the following contributions in mechatronics learning. (1) A distance learning platform was developed and experimentally tested using a mechatronics module. (2) Learning exercises were specifically targeted to the purpose of the laboratory. (3) Mechanisms that further support the students were developed. (4) The technical aspects of the proposed platform are presented.
2. Design and Development of PLC and WebAccess Learning System
WebAccess has the following three parts. (1) the Project Node, (2) the SCADA Node and (3) the Client Node. The Project Node is the development platform, in which a centralized database and web server provide the initial connection between a Client and a SCADA Node, allowing project managers to create an I/O database, establish an alarm system, or monitor data using graphs. The SCADA Node enables a remote PC to communicate using automated devices providing real-time functionality and the ability to produce data reports. The Client Node is a browser plug-in providing a human interface with functions such as real-time data indicators, flash, trend, alarm, and report. The Client Node communicates with the SCADA Node over the Internet using the transmission control protocol/Internet protocol (TCP/IP).
Besides the above functions, the learning system architecture is built on the web and a wide range of internal communication interfaces, databases and connections are available for various PLC devices, such as the ModBus TCP/RTU communication protocol, serial port communication, TCP/IP, dynamic data exchange (DDE), network dynamic data exchange (NetDDE) and open database connectivity (ODBC). These functions can be carried out with Internet communications, to perform data transmission and device monitoring more easily. After outlining the interface environment, an internal computer, the RS-232, provides data exchange connection communications with the RS-422 of the PLC for transferring data.
2.1 Architecture of the monitoring and control system
Figure 1 shows the system architecture in which the Project and SCADA Nodes use a computer as a WebAccess web server. PLC RS-422 provides communication functionality via computer RS-232. Additionally the Web-CAM also collects real-time images of a mechatronics module for remote monitoring, to display an onsite status in real-time. A client can connect to WebAccess web servers containing Project and SCADA Nodes directly via the Internet by directly keying in the IP address of the SCADA Node for remote monitoring of devices. To maintain remote monitoring software or modify the system, administrators can connect directly to a Project Node without the need for direct onsite access, thereby reducing time and costs.

The system architecture
2.2 Programming PLC contact points and WebAccess data points
Before developing a remote graphical monitoring and control system operational interface, hardware/software data points must be planned using the security system (in graphic control) to build the control privileges of multiple users for efficient management of remote monitoring operations. Table 1 shows the mechatronics module contact point programming for the mechatronics module. Table 2 shows the data point programming for WebAccess. Figure 2 shows the mechatronics module. The signal is fed through the WebAccess server from the PLC RS-422 to the PC RS-232, enabling clients to connect (via the web) to a computer with Project and SCADA Nodes for remote monitoring.
Contact point programming for mechatronics module

Data point programming for WebAccess

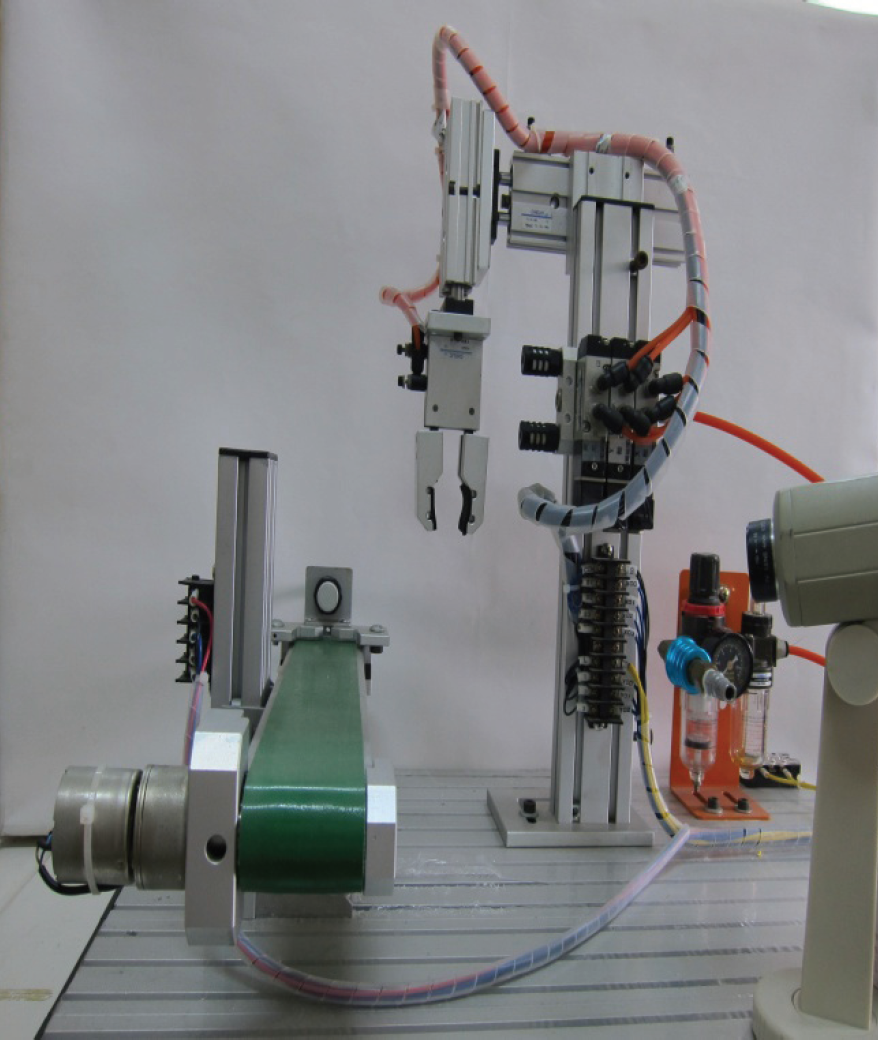
Mechatronics module
3. Remote Graphical Monitoring and Control System
3.1 System and user units
The students are connected to the different learning systems using different IP addresses. The system and user units' main characteristic must be problem-free use. After connecting to the learning system, the students navigate to the web page of the web-based laboratory platform. The students can run the actual mechatronics systems via the PLC. They can apply their control software to actual mechatronics systems and can follow the operation of the system via a Web-CAM installed in the laboratory and simultaneously view the actual system on their monitors. When students log in to the system over the internet, they can monitor and control the mechatronics experiment. A Web-CAM remote monitoring panel can also be used for live broadcast of the actual experiment. Students can perform the experiment whether they are on campus or at any remote location. To achieve the remote monitoring and control features, a client-server distributed environment has been implemented.
Figure 3 illustrates the password protected remote login page. After verifying account information, the bottom part of the screen displays the current user name, whereupon the user enters the monitoring system. The interface and user privileges can be adjusted for different users to facilitate system management and maintenance. Figure 4 shows the monitoring and control page containing a control panel on the left screen. During remote motor control, users can monitor the state of motor actions, system startup and monitoring system anomalies in real time. Figure 5 shows the real-time feedback image transmitted via Web-CAM. The WebAccess video display function embeds real-time Web-CAM feedback images into the remote monitoring and control system to highlight the actual status of the learning system.

Password protected remote login page
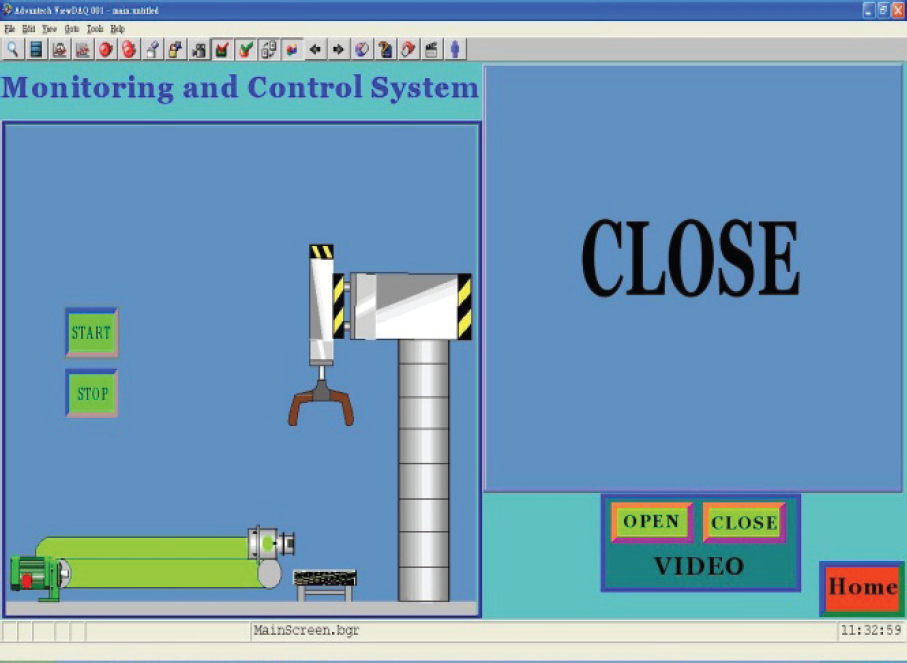
Monitoring and control page

Real-time feedback image via Web-CAM
3.2 WebAccess project manager and SCADA Node
Breakthroughs in computer communications technology and the emergence of multimedia techniques have been incorporated into the Internet, with immense influence over the entire field of computer applications. A HMI can be developed directly through the manager system and downloaded via the web to a remote computer, thereby saving time when building a web server and enabling system administrators to access this page for management and maintenance. After function design via the HMI and a personal computer, end data are remotely download, it connects to a device to build the human operational interfaces, whereupon final online tests can be performed. When properly configured, the data can be linked to a WebAccess web server via an IP address for remote monitoring and system management.
4. System Integration Test
After logging onto a mechatronics monitoring and control system, the remote user (the client) can utilize the web to monitor the real-time status of the mechatronics operations and any device in a plant and monitor feedback from the Web-CAM in real-time frames (Figure 6). Thus, device management is made both convenient and efficient.
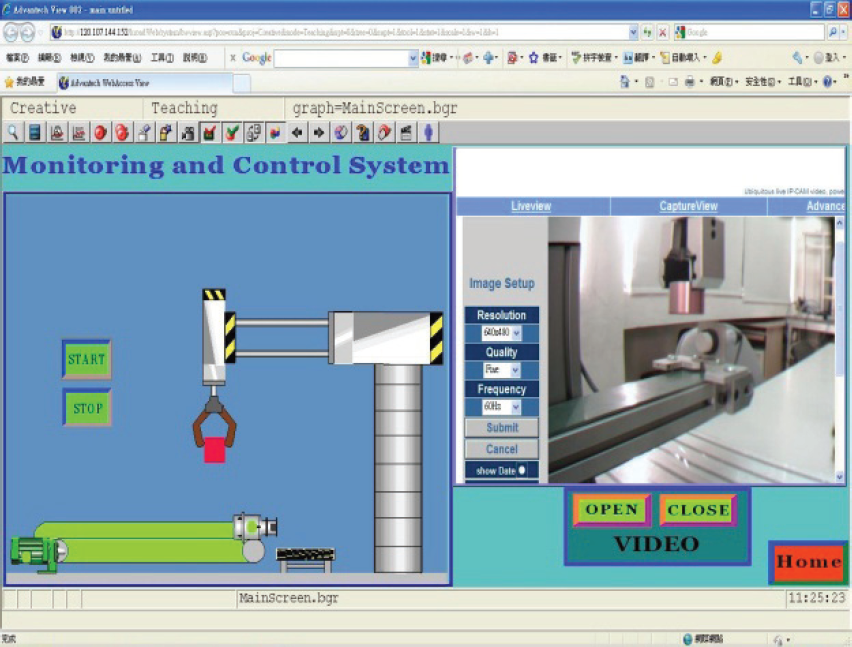
Mechatronics operation Web-CAM video screen
5. Evaluation
5.1 Procedures
The study conducted a WebAccess laboratory, including a lecture and experiment. The course was managed by a teacher and two teaching assistants. Fifteen graduate students were drawn from a population of graduate students (average age 21 years). Students were required to prepare prior to the laboratory work and write a report upon completion, whereupon they were given the option of completing a project.
5.2 Measures
A learning evaluation system was used to test the efficacy of the system in terms of teaching, learning and student achievement. Evaluation has a marked impact on student motivation and encourages teachers to explore new ways to improve individual learning attitudes. Students were required to continually evaluate their own performance and that of their peers [17]. User evaluation is a domain that is not as well articulated and explored as assessing whether a system is usable, or whether it actively increases work productivity [18].
The laboratory was designed for educational application. A system evaluation was performed to capture student likes and dislikes and whether the experiment met their needs. The platform was first tested and evaluated. The mechatronics module was tested for accuracy and completeness and the generated output data were checked and validated. Second, the outcome was evaluated once the laboratory platform was constructed. An evaluation form was designed to evaluate the usability and effectiveness of the system on a five-point Likert scale from 1 for “strongly disagree” to 5 for “strongly agree”. The scores on items measuring the effectiveness of the laboratory measured whether the experiment accomplished its objectives. The scores on the items measuring the usability of the laboratory reflected its usefulness. Student satisfaction was measured from the scores given to these questions and was adopted as an indicator of the success of the laboratory.
5.3 Expert evaluation
An evaluation by an expert in the field was used to determine the accuracy of embedded knowledge and the effectiveness of the teaching experiment. The lab was validated by a group of ten participants, each of whom were university professors and/or researchers, averaging more than five years of experience in teaching mechatronics. Expert evaluations were generally positive.
5.4 Students evaluation
Evaluation by the students was used to help determine the effectiveness of the project according to the following criteria: usability of the laboratory experiment, the extent to which students gained hands-on experience in mechatronics and whether the project helped students to learn about mechatronics. Evaluation forms were distributed among graduate students who had enrolled on this course in the Department of Industrial Education and Technology at National Changhua University of Education, Taiwan. Most students responded positively, reporting that they enjoyed performing the tasks and found it interesting.
5.5 Limitations
Although these results provide some insight into effective learning initiatives, a number of limitations must be addressed when interpreting them. First, this study represents the test of a theoretical model and should be subjected to further testing with different participants, contexts and technological architectures. Second, the participants were graduate students completing the course as part of a degree requirement. Therefore, these results may not necessarily be generalized to other settings or contexts. Issues of motivation among participants can also influence results. Third, owing to the course requirements and the focus of the research questions, we were unable to completely capture the richness of the reciprocal relationship between social presence and interaction.
6. Conclusions
This study develops a novel remote graphical monitoring and control system for learning a mechatronics. The presented system utilizes WebAccess graphical control software for programming a human interface. This approach differs considerably from previous studies [8], in that most remote graphical monitoring and control systems require additional web servers, are difficult to maintain and cannot provide core data directly. The proposed WebAccess architecture is web-based. Therefore, programming the human computer interface, constructing data points and establishing all of the required functions can be realized directly on the web. This proposed system even facilitates convenient remote maintenance, in which administrators directly log onto a management page to modify functions, backup data and perform updates.
According to our survey results, most of the participants felt that the main advantages of web-based learning systems were the ability to set one's own pace and the flexibility of scheduling which allowed them to revisit some materials without being rushed. The disadvantages were the lack of immediate clarification from an instructor and other forms of human interaction. This system will hopefully bridge the gap between university education and industrial applications. The proposed system contributes to user understanding, enabling students to rapidly adapt to changing industrial environments following graduation.
In the future, this developed learning system could enhance academic research and automation applications and benefit management and real-time monitoring. Furthermore, the proposed remote graphic monitoring and control system utilizes the advantages of the Internet, which allows users to monitor device operations remotely at any time, transmit Web-CAM images via a network to user's computer and provide real-time images of onsite equipment operation.
7. Appendix
DDE: Dynamic Data Exchange
HMI: Human Machine Interface
I/O: Input/Output
NetDDE: Network Dynamic Data Exchange
ODBC: Open DataBase Connectivity
PLC: Programmable Logic Controller
SCADA: Supervisory Control And Data Acquisition
TCP/IP: Transmission Control Protocol/ Internet Protocol
Footnotes
8. Acknowledgments
This work is based upon work supported by National Science Council, Taiwan, Republic of China, under grants NSC 100–2511-S-018-008.