
Abstract
In this paper, we examine key issues underlying the design and operation of robots featuring continuous body (“continuum”) elements. We contrast continuum and continuum-like robots created to date with their counterparts in the natural world. It is observed that natural continuum locomotors or manipulators almost invariably rely on hard or discrete elements (in their structure or operation) in their interactions with their environment. We suggest innovations in continuum robot design and operation motivated by this observation, supported by experiments using the “Tendril” continuum robot. The results suggest new ways in which continuum robot operations could be significantly enhanced. In particular, the exploitation of “hard” and “discrete” environmental features can greatly enhance stability in continuum robot operations, compensating for inherent backbone compliance. Additionally, the incorporation of discrete behaviours (sweeping and striking with the backbone) can both compensate for imprecision in continuum robot control and enable new impulsive manipulation modes. We discuss the implications for the creation and potential application of novel hybrid continuum and discrete robots.
1. Introduction
There are innumerable alternatives available to the robot designer. However, only a small subset of these alternatives has been realized in hardware to date. Most modern industrial robots are (human) arm-inspired mechanisms with serially arranged discrete rigid links. This is fine for industrial work, where the workspace is predefined and structured. However, robots are currently generally confined to such engineered and carefully controlled environments, and kept well away from humans and their world.
A robot that must interact with the natural world needs to be able to solve the same problems that animals do. Animals come in many shapes and sizes, with widely varying specialized limbs suited to their particular everyday tasks. However, most robots are built according to “general-purpose” specifications with little attention to what they will ultimately be used for. The rigid backbone elements of traditional robots limit their ability to manoeuvre in tight spaces and congested environments, and to adapt to variations in their environmental contact conditions.
In response to the desire to improve the adaptability and versatility of robots, there has recently been much interest and research in “soft” robots [40]. In particular, numerous research groups are investigating robots based on continuous body “continuum” structures. The motivation for this work often comes from nature. If the body of a robot was soft, or continuously bendable - or both - it might emulate a snake or an eel with an undulating locomotion [11]. A worm-like or snake-like robot could navigate through a variety of terrains. Another option is for a continuous manipulator. A continuum manipulator could be similar to a prehensile tail, an elephant's trunk [7],[15],[51] or an octopus's arm [23],[30].
Numerous different types of soft and continuum robots have been proposed. Robotic snakes have been built by a few different groups [17],[18],[32],[34]. These have almost all been built using multiple discrete links. These hyper-redundant robots can move in most of the ways snakes can, but they are not as conformable. Hyper-redundant robots, like the SnakeBot [20], represent a bridge between discrete links and continuous elements.
Continuum robots, such as the Octarm [30] and Tendril [9],[31] (Fig. 1), have continuous backbone sections which can conform around objects. Numerous continuum robots have been proposed in recent years [3],[47], with medical and surgical applications [35] predominant [27],[48]. Soft robots, such as Softbot, are almost gel-like in their form [22],[26],[49]. However, soft continuum robots are hard to build, model and control [50],[53]. Construction is hampered by the current lack of truly integrated “soft” actuator technologies and the need for hard components to transmit their power. Modelling (and the real-time implementation of the models) of the infinite degrees of freedom inherent in their continuous backbones and the compliant properties which form a great part of their appeal has proved a major obstacle to progress in this emerging field [50],[53].
There is an inherent trade-off between continuous and discrete elements. For example, continuum structures can conform to their surroundings while discrete rigid links aid precise positioning. A combination of the two might yield a strong yet malleable form. Interestingly, continuum structures in nature seem to synergize their activities with various kinds of discrete elements, as discussed in the following sections. The discussion is supported by hardware experiments using a continuous backbone robot (see the following paragraph). In part, and using insights gained from the experiments, we argue in section 3 that with a judicious mixture of soft, continuous and hard, discrete elements, robots can be made to perform many tasks.
We explore the practicality of the concepts introduced in this paper via a series of experiments using a prototype of the “Tendril” continuum manipulator [31]. Tendril is tendon-driven with a body comprised of springs (Fig. 2). Its two joints are made of compression springs with tendons attached to two motors and pulleys for each joint. Its body is long and thin, emulating the tendrils of some plants. NASA designed Tendril for minimally invasive inspection.
The version of Tendril used in the experiments reported here was assembled by the authors at Clemson University from spare parts from NASA's original Tendril, supplied by the original developers of the robot at NASA/Johnson Space Centre [9]. The tendons were actuated via the four actuator motors under computer control - in position control mode - using a standard PC and I/O board. The desired shapes were converted by a kinematic algorithm to the desired tendon lengths, with the control loop closed at this level. The system proved rugged and repeatable.
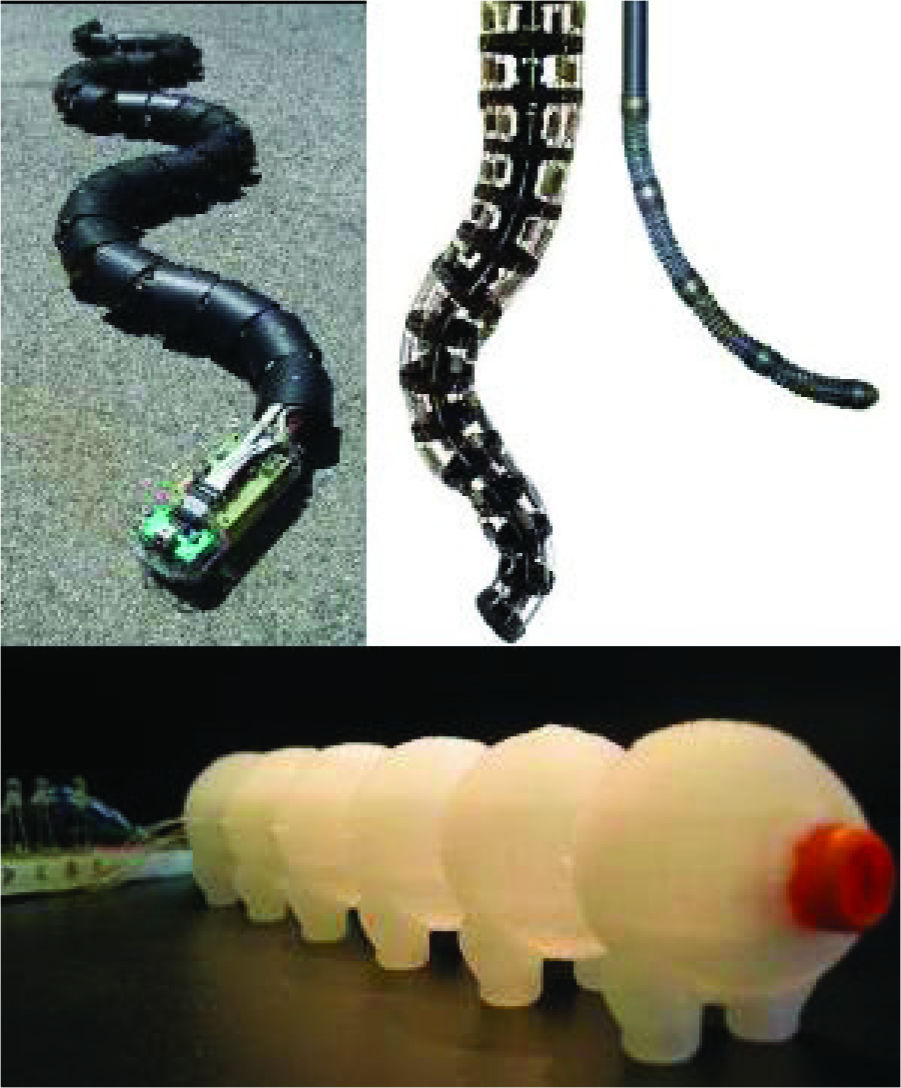
Top left: S5 robotic snake built by Dr. Gavin Miller (adapted from http://www.snakerobots.com/S5.html); top middle and top right: elephant trunk manipulator [15] and Tendril continuum manipulator [31], both constructed by the second author's group at Clemson University; bottom: Softbot [22] (image from http://www.sciencemetropolis.com/category/technology/. Credit: Tufts University).

Tendril continuum manipulator prototype. The diameter of the backbone is 0.4 inch. The joints labelled (neither is fully flexed in image) have a length of 3.25 inches. The overall length of the tendril used in experiments is18 inches.
In the experiments reported in this paper the Tendril is used as a tail, an eye stalk, and a trunk. These experiments were developed based on ideas arising from the biological counterparts, and both the ideas and experiments are presented in the following section.
2. Insights and Innovations from Nature
Animals in nature have a wide variety of continuum structures. Tongues, tails, tentacles, arms (note the appendages of the octopus are referred to as arms) and various other appendages all have a function that they perform for the animal in question. In the following subsections, we classify these functions into three main classes: balance and stability; exploration, sensing, and manipulation; and obstacle removal and grasping.
2.1. Balance and Stability
There are many instances in the animal kingdom of single, hyper-redundant or continuous limbs being used for balance, like the tail of a kangaroo or a dinosaur [25]. Some gecko species use their tails to help when they climb [21]. Monkeys can use their prehensile tails to hold onto branches and improve their stability [8]. A prehensile tail is often wrapped around a stable, solid object at a discrete location and used as an anchor for support (Fig. 3). A caterpillar is similar in that it will anchor part of its body while the top half moves around to eat. Many other creatures, such as opossums and seahorses, have prehensile tails. Such tails can be used to balance on land, in the trees, or under the sea. In this sense, natural continuum structures compensate for the complexity inherent in their “softness” by environmentally grounding themselves at discrete body locations, typically coupling with rigid environmental elements. In contrast, when a kangaroo's tail is used for balance when running, it is typically discretely controlled, compensating for its complexity by simple cyclical movements, being swung out behind to counter the animal's movements [38],[42]. Soft continuum robots could clearly benefit from adopting similar strategies.
2.1.1. Stability Experiments with Tendril
Sometimes, a robot needs extra stability in order to accurately position itself or maintain its position. An arboreal robot would benefit from a tail-like appendage similar to a monkey's tail. If there was an increase in wind, the tail could be wrapped around a branch (or in a mechanical environment, a beam) in order to secure itself. Alternatively, if other limbs were needed for manipulation, the robot's tail could anchor the robot's body to allow the other manipulators greater freedom of movement.
There are many way by which to anchor continuum manipulators, such as Tendril. In the following, we outline some initial work with Tendril exploring the possibilities. The main goal was to investigate the possibility of effectively anchoring Tendril using simplified motions.
The premise of the initial experiment was to see how Tendril would work if it was used to stabilize a system. During the first part of this experiment, a small piece of Velcro was attached to the tip of the Tendril and it was swung towards an opposing piece of Velcro attached to a stable point. The strength of the anchoring was checked by pulling the Tendril in the opposite direction to see how well it was anchored (Fig. 4). Discrete control (in the sense discussed above and expanded upon later in the paper, sections 2.3 and 3) was used to fling the Tendril out towards a general region, since precise continuous control was not perceived to be needed. It was observed that the Velcro on the Tendril was not needed initially, since the tip's jagged edge stuck to the Velcro on its own. The tip of the Tendril stuck to the Velcro and, pulling in the opposite azimuth direction, resulted in Tendril pulling the Velcro and then releasing it in a sudden movement. As the Tendril pulled away, it initially twisted in place because of the torsional compliance inherent in its structure and the way in which the tip connected to the Velcro. However, the experiment demonstrates the effectiveness of stable contact generation via the “digital flinging” of a continuum robot.
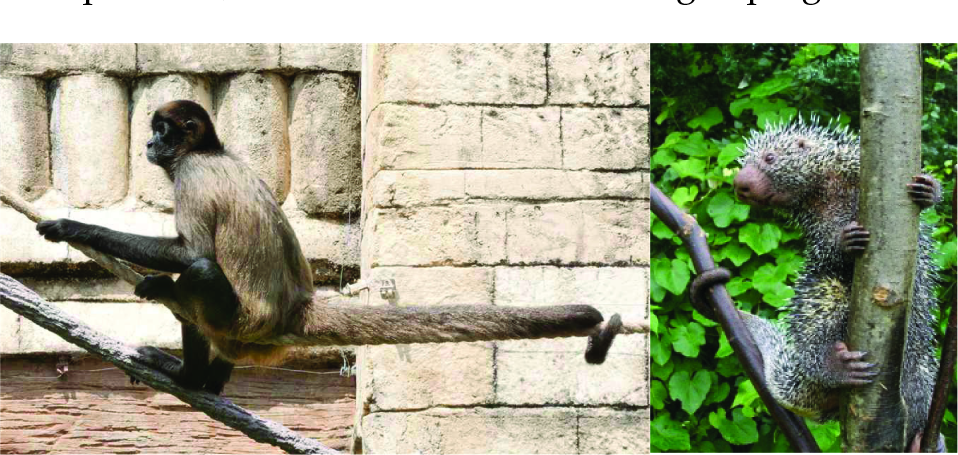
Animals using prehensile tails for balance. Top left: spider monkey (from http://www.northrup.org/photos/spider-monkey/); Top right: Porcupine (from http://quigleyscabinet.blogspot.com/2010/01/prehensile-tails.html).

Tendril pulling on Velcro. Time (approximately 5 seconds) evolves from the top to the bottom row, left to right in each row. The experiment demonstrates the ability to use Velcro, attached to Tendril's tip, as a surrogate end-effector and magnet to achieve anchoring.
A better way to maintain a stable connection at a point would be to use a magnet or a small gripper that could be released on command. To simulate the potential for this type of gripper with Tendril, a piece of Velcro was attached to an object in order to allow the Tendril to pick it up. A strip of Velcro was put onto the tip of the Tendril so it could lift the object. The Tendril was moved in the direction of the object to make contact. Then, the Tendril moved the object around (Fig. 5). In order to release the object, the Tendril was swung from side to side. This shows that Tendril could move small lightweight obstacles if a simple gripper were added to its tip. It was quite effective in moving lightweight objects.
Alternatively - and more interesting for a continuum robot - a solid contact could be achieved and maintained by wrapping the tip of the robot around a stable environmental object. It was not possible to explore this concept empirically with Tendril because the robot, at present, has only two joints and cannot bend 360°, which makes it difficult to wrap it around an object.
2.2. Exploration, Sensing and Manipulation
Exploration and sensing are other key functions of natural continuum limbs. Snakes have many different ways to locomote. The four main locomotion-types are lateral undulation, rectilinear locomotion, concertina locomotion and sidewinding [18]. The type of motion that a snake uses depends upon its environment. Lateral undulation is the main way in which snakes move, by undulating side-to-side [6]. Rectilinear locomotion determines how large pythons and anacondas move, using their belly scales [18]. Peristaltic motion has been the inspiration for several recent efforts in robotics [5],[28]. Concertina movement is how snakes climb or move in limited surroundings, such as tunnels [18]. Sidewinding is used to move in the desert over loose sand [18]. Under water, eels and sea snakes can wind their way through holes in the coral to find food.
Often, natural continuum elements are used as both sensors and effectors. Garden eels, brittle stars and basket stars all sway in the ocean current to detect food. When a brittle star senses food, it will fling its arm out in the general direction of the food [16]. Then, it will coil an arm around it and bring the food to its central mouth. Once again, this flinging is not necessarily continuously controlled, but is sometimes discrete since the arm merely unfurls in the needed direction [16]. A similar pattern of discrete control and combination of sensing and exploration is adopted by plants, such as vines (Fig. 6) [13].
Alternative natural sensing continuum appendages include whiskers and antennae. Many animals have whiskers to help with their spatial awareness. A catfish's whiskers are used to check the muck at the bottom of a river for food. The tentacles on the snout of a star-nosed mole are very touch sensitive [36]. A robot could use a continuum appendage with sensors to probe places its main body cannot reach. This would be very useful in the exploration of hazardous areas.

Lifting a payload (a plastic toy, approximately 0.5 pounds). The dimensions of the arena for the experiment were approximately 10 inches3. Time (approximately 10 seconds) evolves from the top to the bottom row, left to right in each row. The experiment demonstrates the ability of the robot to acquire, carry and release small objects if equipped with a small magnet or gripper at the tip.
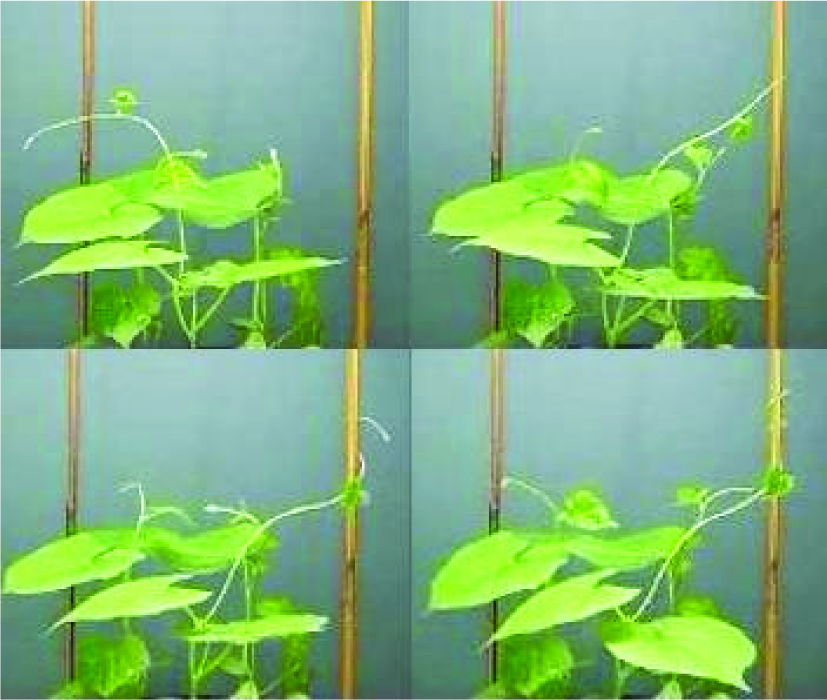
Climbing morning glory vine. Example of grasping with a continuum structure in nature. Time evolves top to bottom, left to right in each row. A vine Tendril circles (top left) until coming into contact with a rigid environmental object (top right). The Tendril then wraps around the object to stabilize itself (bottom images). Images (from time lapse movie shot at a 10 minute interval) from http:plantsinmotion.bio.indiana.edu/plantmotion/movements/nastic/twining/vines.html.
It appears that the natural soft/continuum elements are seldom used in isolation from discrete or hard elements. For example, an octopus will wrap its arm around an object but uses its suckers - located discretely along the arm - for fine sensing and manipulation (Fig. 7) [14]. Millipedes have a hyper-redundant body studded with numerous discretely positioned legs. Their bodies will conform to the obstacles that they crawl over while using the fine movements of their legs for adjustments. Large anacondas use their belly scales to crawl forward silently when stalking prey [18]. These three creatures all use a combination of soft and hard(er) elements. Such hybrid continuum and discrete structures incorporate discrete elements for fine resolution, using discrete parts for fine work and their continuum anatomy for general purpose positioning.
2.2.1. Exploration and Manipulation with Tendril
NASA originally designed Tendril for minimally invasive inspection [31]. A long thin robot with a camera on the end would be very useful when probing tunnels or other small-diameter openings where flexibility is needed. (For example, NASA envisioned Tendril performing inspection operations under the blankets covering equipment in the space shuttle cargo bay, and in crevices on the lunar surface.) The teleoperation of Tendril can be achieved by observing the images from the video camera and moving the tip joint in the desired direction of travel. The ability to extend and retract the Tendril is needed for the full use of this ability. The initial Tendril prototype at NASA has a base unit enabling it to extend and retract its length [31]. However, the Tendril prototype at Clemson University that was used in these experiments lacks this unit. Therefore, for this experiment, the tunnel was moved up or down by hand (a vertical single axis motion of the whole “anthill” with no rotation) in order to simulate the extension and retraction of the robot.
A wireless camera was attached to the end of the Tendril to be used as an eye (Fig. 8). The camera was externally powered, with the power cable aligned along the Tendril backbone. (It could have been routed inside the backbone of the Tendril, but this proved unnecessary for the experiments performed.) The Tendril was operated by observing the transmitted images and moving the tip joint appropriately. An anthill-like system with multiple exits was constructed using tunnels wide enough for the Tendril to pass through when the camera was mounted on the end. This experiment required dexterity and more precise control than the prior attachment and stability experiments. The camera was mounted so that its position in relation to the azimuth was known.
Next, the Tendril and the camera were placed in the tunnels in order to explore the many exits available. An object was placed near one of the exits and the Tendril was used to find the block in the tunnel. Typical views of the environment are shown in Fig. 9. The tip joint alone was moved, since it was used to guide the Tendril via the camera. The goal of this experiment was to use the Tendril like an eye stalk of a snail, so it needed to be able to move about freely and observe its surroundings. (A snail can bend its eyestalks and can extend and retract them as well.) The tip of the Tendril was inserted into the tunnel so that it could be turned from side-to-side to observe its surroundings. Then, a path was chosen and the tunnel was moved forwards. This was repeated until the camera saw the obstacle in the tunnel.

Octopus opening a jar with its arms. Octopuses are very adept at jar opening [12]. Image from http://universe-review.ca/R10-33-anatomy.htm.

Tendril tip with an externally powered camera.

“Anthill-like” environment for the teleoperation of the Tendril, viewed from a tip-mounted camera. The horizontal holes' diameters are approximately 1 inch. the depth of the open region in the images is approximately 6 inches. The left image shows an empty environment. The green region in the right image shows obstacle objects to be found.
If Tendril is to be used in general tunnel environments, it will need a light source so the camera can see. One issue that arose was that the camera's weight caused the Tendril to sag. This could be resolved by using a smaller camera in future experiments. Overall, this experiment was a success because Tendril was able to explore the tunnels even when encumbered by the weighty camera. If a camera was light enough, then it could be placed on the tip of a tendril-like continuum manipulator and mounted on a robot to be used as an eyestalk to look around obstacles.
Manipulation with Tendril was demonstrated using the “Velcro gripper” of section 2.2.1 (Fig. 10). A ping pong ball had Velcro strips attached. The Tendril was deployed to attach its tip to the ball and then manoeuvre it into a hollow cylinder. This behaviour proved repeatable over multiple trials.
2.3. Obstacle Removal and Grasping
Another way to exploit a continuum limb is to use it to remove obstructions and rapidly grasp or manipulate objects of interest in the environment. A whip-like structure can be flicked out to move an obstacle from an animal's path. The movement does not have to be particularly accurate, since it often just needs to be cast in the correct general direction. Many animals use their tails as weapons. Komodo dragons will whip enemies [33] as will stingrays (Fig. 11). If considered as a weapon system, a scorpion's tail would make an interesting model. Continuous natural appendages are also used as weapons. The tentacles of a squid are used to dart out in the direction of prey [24]. Similarly, a brittle star can fling its arms in the general direction of food and then draw the arm in to feed itself [16].
Octopus arms, which are formidable weapons as well as effective manipulators, appear to be similarly, discretely directed in the direction of objects of interest, rather than having their shapes closely controlled [45]. Brittle stars manipulate objects in a similar manner to octopuses, but unlike octopuses the brittle star does not have strong suction cups on its arms [16]. Each arm is like a snake's tail and can be used to wrap around objects. They can slither or crawl, depending upon the terrain. Their arms are quite dexterous and can be used to grab food and move it to the star's central mouth. Elephants also simplify the control of their trunks by moving them within a plane oriented towards objects they desire to grasp [29].
Humans can also be very effective when augmented with continuum tools. Whips, lassos and chains are all flexible tools that can be used in a variety of ways. In the movies, the character Indiana Jones uses his whip to swing across gaps [44]. If a robot could do this, then it could transport itself to places it could otherwise never reach, or at least get there quicker. Ropes can be made into lassos to loop around objects. Cowboys use lassos to capture errant steers. A robot could potentially use a lasso to hook onto rock outcroppings to pull itself up a cliff. A grappling hook is a closely related alternative.
A common element in all the above examples is - once again - discrete control, with the problem of the close control of all degrees of freedom in the continuum structure sidestepped by making simplified motions (controlled by a discrete set of variables) in specific directions. In many cases, only the direction and speed need to be directly controlled. A continuum limb could similarly be used swiftly and effectively to fling obstacles out of a robot's path or else to form quick but effective curling grasps.
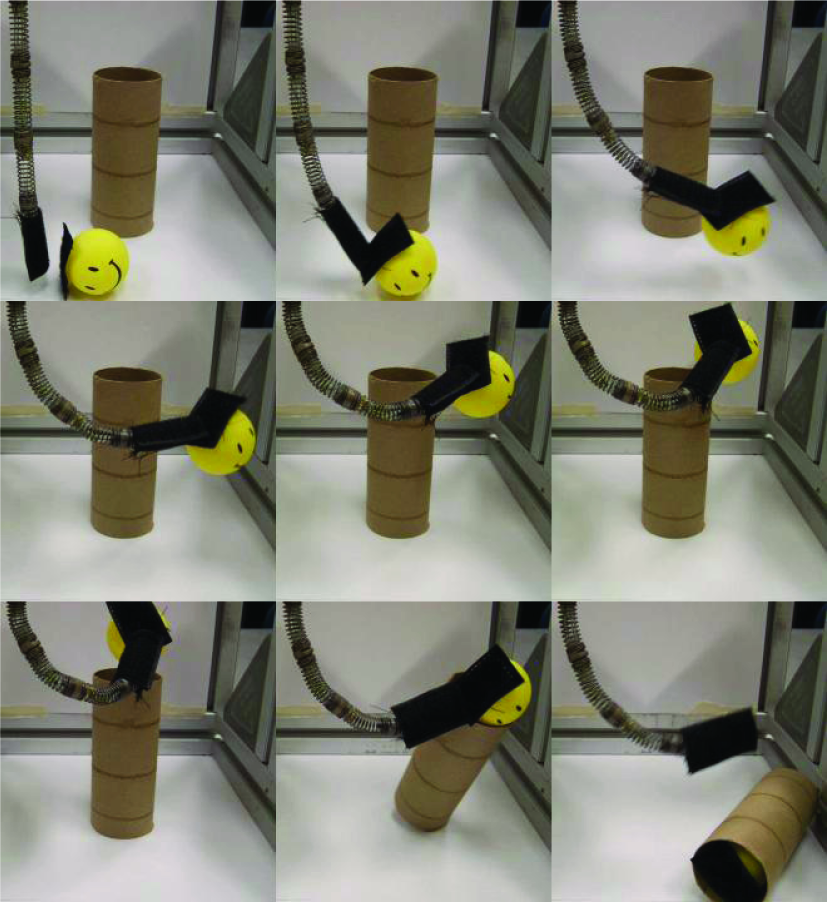
Acquiring a payload and manipulating it into a hole. The diameters of the (ping pong) ball and the (toilet toll core) tube are approximately 1 inch. Time (approximately 10 seconds) evolves from the top to the bottom row, left to right in each row. The experiment demonstrates the ability of the robot to carry and manipulate small objects if equipped with a small magnet or gripper at the tip.
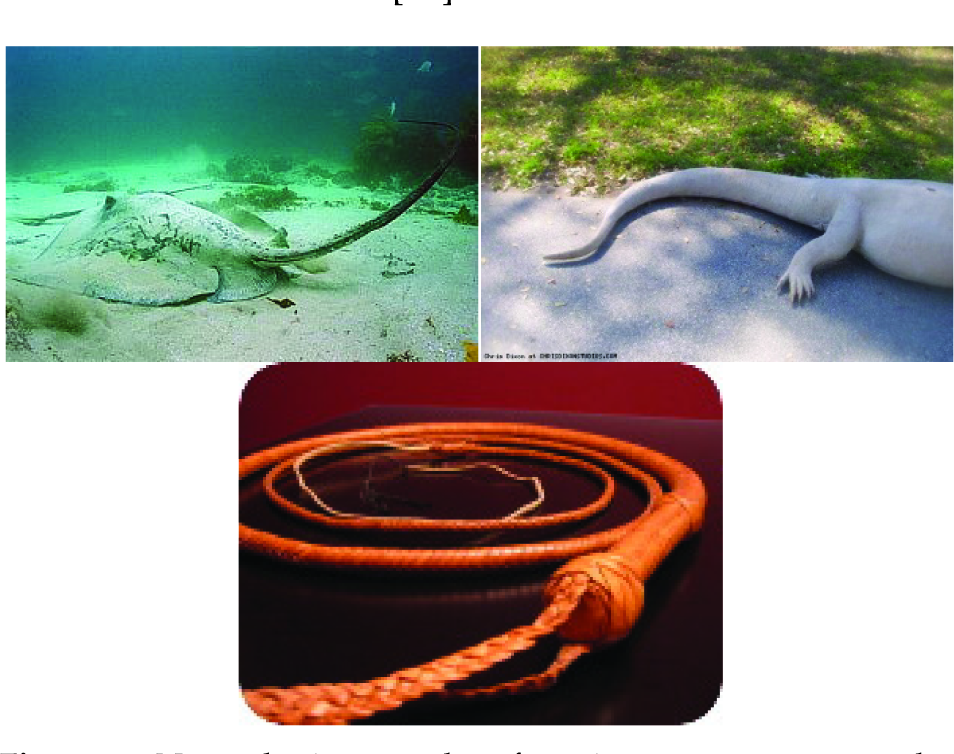
Non-robotic examples of continuum structures used for impulsive tasks. Top left: Stingray tail (from http://www.seafriends.org.nz/issues/res/pk/stingrays.htm); top right: Komodo dragon tail (Chris Dixon at chrisdixonstudios.com); bottom: Bullwhip (from http://www.stealthboy.com/whipmaking.php).
2.3.1. Obstacle Removal with Tendril
The ability to remove obstacles from Tendril's path would be of great benefit to its operation in remote areas. Rather than going around a small obstacle, a robot could use a discrete flicking action to swat obstacles from its path. Another approach would be to position the manipulator near the obstacle and slowly lever it out of the way. If the robot were to get stuck, it could potentially dig itself out. The following experiment was designed to test the ability of Tendril to remove obstacles from its surroundings.
In the first part of this setup, the Tendril was used to fling objects out of its way, similar to the motion of a komodo dragon's tail. A ping pong ball was placed upon the end of a wrench and then the Tendril was swung in the appropriate direction. The ping pong ball was launched off of the wrench like a golf ball off a tee (Fig. 12). Small, light objects are easy for the Tendril to manipulate, but heavier objects pose a problem. When a heavier obstacle was placed in front of the Tendril, its springs bent around the object rather than moving it out of the way. This effect had been observed before when trying to lift objects with the Tendril. The slack in the side lines caused by increasing the Tendril's elevation causes its tip to sag to either side when a load is placed on the tip. This is an example of the wider disadvantage inherent in the design of compliant continuum structures.
In the second setup, the Tendril was used like a wrecking ball to clear ping pong balls off of a tray in a predetermined order (Fig. 13). A discrete motion is best for this experiment, since the only important variable is the azimuth. The tip was moved in the azimuth direction of the desired ball to remove it. A faster movement caused the ping pong balls to fly further. The key point here is that the task was achieved with a very simple but effective strategy, without the need for complex models or controllers. This suggests that the use of the Tendril in impulsive manipulation tasks using simple motion strategies could be highly effective.
2.3.2. Grasping with Tendril
The grasping and manipulation of an object is a fundamental part of robotics. In order to interact with the world, a robot needs to be able to manipulate its surroundings. Experiments using Tendril for impulsive grasping were conducted. In this setup, the Tendril grasped at a ring suspended in the air in order to remove it from its base and relocate it to a different area (Fig. 14 and 15). Similar to fairground games of chance, it requires some skill to move the Tendril accurately when trying to pick up the ring.

Swatting a ping pong ball. Time (approximately 2 seconds) evolves from the top to the bottom row, left to right in each row. The experiment demonstrates the effectiveness of a discrete control strategy, exploiting impact dynamics in manipulating environmental objects.

Removal of balls from a tray. Time (approximately 1 minute) evolves from the top to the bottom row, left to right in each row. The experiment demonstrates the ability of a discrete control strategy, exploiting impact dynamics in selectively manipulating objects in complex environmental fields.

Tendril lifting a ring and placing it on a base. Time (approximately 10 seconds) evolves from right to left. The experiment demonstrates the ability of the robot to acquire and manipulate small, thin objects without grasping flat surfaces with parallel jaws.
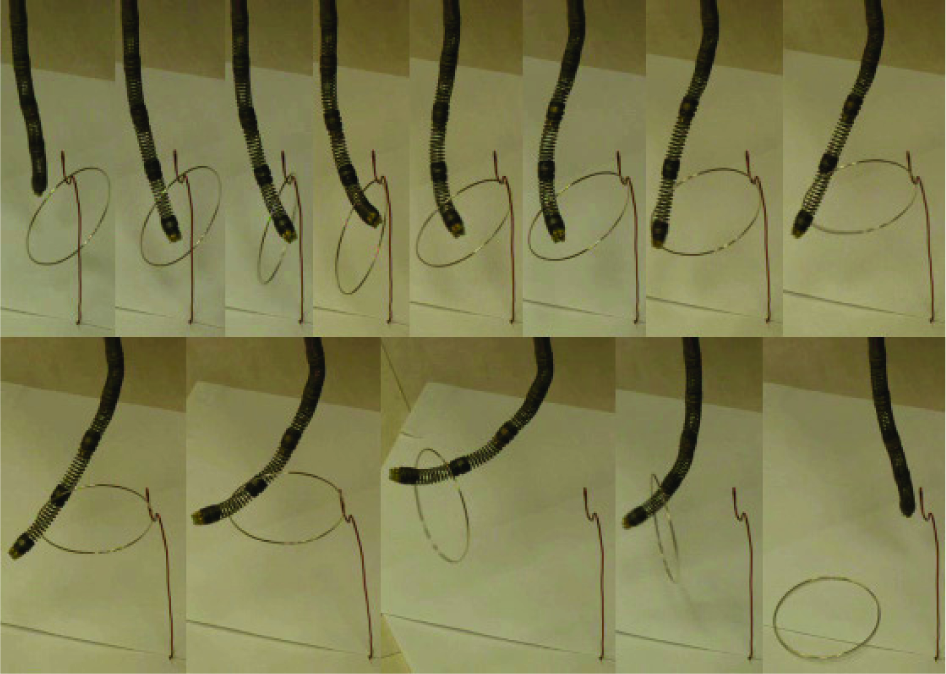
Tendril lifting a ring off of base. Time (approximately 10 seconds) evolves from the top to the bottom row, left to right in each row. The experiment demonstrates the ability of the robot to acquire and manipulate the object in the presence of environmental constraint forces and torques.
2.4. Discussion of the Experimental Results
The experiments show that the Tendril has many potential uses that were not envisioned previously. The stability experiments showed that it could be operated simply to act in a manner similar to a biological tail to grip objects. The stability of a robot with a continuum element can be increased by anchoring the continuum element to a reliable point so that its other elements can have a stable base to move from. The teleoperation of the Tendril using a small, tip-mounted camera demonstrates its potential effectiveness for the inspection of narrow enclosed spaces that are a priori unknown. However, teleoperation requires more precise, - and thus more complex - control. The operation and control strategy for the Tendril depends upon what it needs to do. Continuous control is useful for tasks that require precision. Discrete control is better for moving in a general direction. If the Tendril is to be controlled discretely, by flicking it towards obstacles, then the speed can be adjusted to increase the force of the swing. The skill of the Tendril's operator is important when directly controlling it. Just like casting a fishing line or controlling a puppet, it takes a certain amount of learning to do it well.
3. Implications for Soft and Continuum Robots
The examples from nature and experiments with Tendril in the previous section motivate a new look at soft continuum robots. Up to this point, most development has been motivated by the desire to create “fully soft” continuum robot bodies with no hard or discrete elements, and to precisely control their shape through the continuum of possibilities, independent of their environment. However, it seems clear that many natural soft and continuum elements are successful precisely by incorporating discrete elements, simplifying their movements or else interacting in a way very specific to their environment. The key in all the cases we have discussed is complexity reduction, which leads to strong implications for robot development. Each of these issues is investigated in the following subsections.
3.1. Complexity Reduction
A key goal for soft continuum structures is adaptability: compliance to environmental constraints via an enhanced (essentially infinite dimensional) configuration- or shape-space. In robotics, almost all efforts so far have tried to achieve this via soft compliant bodies in controlled continuum contact with their environment. (The two main types of continuum manipulator today are tendon-driven [6],[15],[19] or pneumatically controlled [19],[37],[51],[54].) However, the resulting decision-space (and its requirements for sensing and planning) is vast. A key simplifying observation from the natural world is that in nature, soft continuum limbs are used mostly for approximate positioning, strongly exploiting discrete elements in their structure, operation or their environment to simplify and resolve their operation. In all cases this allows for complexity reduction: environmental contact and fine manipulation details are handled by discrete scales, legs or suckers; the movement space is restricted to a given direction or plane, as in the movements of octopus arms and elephant trunks or the dynamic balancing of tails; imprecision due to environmental forces is alleviated via stabilization using tails, anchors or tongues. All these concepts could be exploited in novel robotic counterparts.
Another aspect which appears to have been rarely considered as a major issue in robotics, but which appears critical in nature, is that of the underlying nature of control. Continuous control (the regulation of the system to an arbitrary shape throughout its workspace) enables precise operation. Continuous control in this sense is the most commonly used form of control in conventional rigid link robots. This allows the control system to compensate for (indeed, to take advantage of) the simplicity of the discrete rigid link structure to achieve the precise positioning desired in structured applications such as manufacturing. However, the effective continuous control of continuum robotic structures is proving extremely difficult to achieve [50],[53]. The increased complexity in continuum structures is hard to model well - or to provide sufficient actuator inputs for - to enable consistent control.
Nature, however, suggests an alternative approach to complexity reduction in control. If a continuous manipulator is controlled discretely (restricting the allowable shapes of the system to a finite set, or a shape-set defined by a finite set of inputs), then it will be much easier to control. It appears that many continuum structures in nature are controlled in a discrete (as defined above) manner, as discussed in section 2. Notice that in this case the compliance inherent in the continuum structure allows the system to adapt to compensate for the simplicity of the control. An extension of this concept to the wider class of continuum robots could enable the practical control of behaviours similar to octopus arm or elephant trunk manipulation. Binary control (enabling “whip-like” movements, as discussed in section 2.3) has corresponding potential for continuum robots in dynamic tasks.
3.2. Design Implications
A common theme in the above discussion is the effectiveness of the combination of continuous and discrete elements. One direct way to achieve this synergy is by incorporating both types of structure in an overall robot design - i.e., a hybrid robot with continuum and discrete elements.
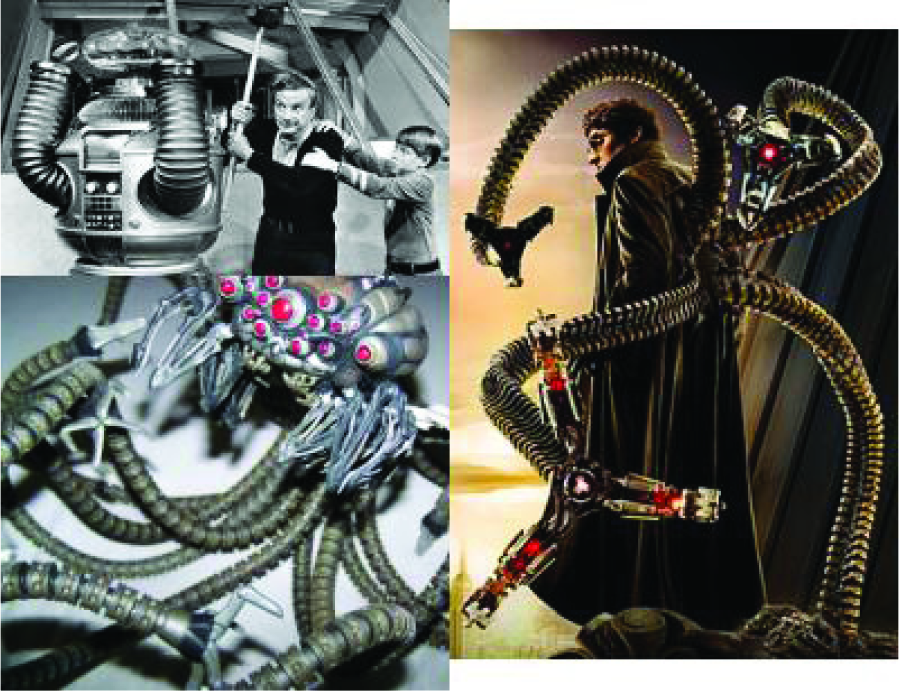
Some hybrid robot designs that combine continuum and discrete elements have been considered previously. One possibility is to have a continuous arm and a simple gripper, like the trunk of an elephant which can pick up a peanut with its finger-like projections. A robot with a continuous arm and a discrete gripper is generally called a “snake-arm” robot. There are numerous examples of snake-arm robots in science fiction (Fig. 16), but few in real life. Science fiction can serve as inspiration just as well as nature. However, while there are multiple examples of fictional continuum robots, there are very few continuum robots in reality. Most real snake-arm robots are discrete, using many joints to become hyper-redundant [15]. Snake-arm robots are used in the nuclear industry and for robotic surgery [6],[43] (Fig. 17). The advantage of having a continuous arm with a discrete gripper is that it would be like having a tentacle with a hand on its end, providing impressive manoeuvrability with a simple, if not particularly dexterous, grasp (Fig. 18).
The question of whether to use discrete or continuous parts is an interesting one, with the answer depending upon how the robot is intended to move and what its function will be. Let us consider an example consisting of an arm and a manipulator. When would it be best for the arm to be continuous (i.e., the snake arm approach)? Having a continuous arm would allow the manipulator to reach places that might otherwise be unreachable. The three most prominent continuum structures in nature are the octopus arm, the elephant trunk and tongues. Underwater animals can have soft continuum arms because they are on slightly affected by gravity. Most tongues are short and stout so they can also ignore gravity. However, an elephant's trunk is affected by gravity and can be seen swinging as the elephant moves its head from side to side. Adding a discrete gripper onto the end of a continuum trunk would cause an even greater sag in the robot.

Commercially manufactured snake-arm robots from OC Robotics. Adapted from [6]. Applications include repair in nuclear reactors (left image) and inside airplanes.

Conceptual discrete arm with continuous fingers. Adapted from [41]
An interesting alternative design approach would be to use a serial discrete link arm and a continuous end effector. This model is less frequently explored than the snake-arm robots, even in fiction. The giraffe is a natural example. The concept can be visualized as a discretely built neck with a continuous tongue as a manipulator. It could use its prehensile tongue to reach places it cannot fit its neck into (Fig. 19). Unlike the giraffe's tongue, most robotics end-effectors are in the form of hands or simple grippers. One example of a hand with continuum elements is the AMADEUS dexterous underwater gripper [40]. This flexible microactuator, built by the Toshiba Corporation, is much smaller and could be used for more delicate tasks [46] (Fig. 20). This type of robot would be like having an octopus for a hand. It would be able to manipulate objects dexterously and do things that current discrete link manipulators cannot do. One issue with the manipulator is the choice of the number and degrees-of-freedom of the fingers. Four fingers is usually enough to manipulate objects in 3D. As with a continuous arm, continuous fingers would have sagging and torsion issues. However, this would be less than for a continuum trunk, and the continuum end effector could compensate for gravity and changes in the environment, such as the movement of its goal, just like a giraffe's tongue can move to catch leaves blown by the wind.
There are few examples of this design typology (a discrete arm with a continuous end effector) in nature. However, we feel that the potential for this type of robot is sufficiently interesting to justify further investigation. (Note there are also few examples of the wheel and yet it is one of humanity's most useful inventions!) We feel that roboticists should look to nature for (biological) inspiration in addition to their (human and cultural) sources of inspiration.
A third alternative design more commonly found in nature would be a non-serial hybrid structure with both continuum and discrete elements. These structures might be ideal for fine manipulation. One natural model for a continuous end effector is the basket star, which has similarities with the brittle star (Fig. 21). Rather than a brittle star's five limbs, the basket star has a fractal-like pattern of tentacles. It is almost tree-like in its form. A basket star-inspired robot would make a manipulator of great potential if you could control such a complex structure.

A giraffe using its tongue to extend its reach. A combination found in nature of a continuum manipulator at the end of rigid-linked structure. http://www.funnyanimalsite.com/pictures/Giraffe_Tongue.htm.

Flexible microactuators. Adapted from [46]. Four continuum “fingers” grasp (left to right) a filled beaker, a wrench and a cylinder. Each finger is formed from three hollow chambers, differentially actuated by compressed air to produce controllable bending.

Illustrations of a brittle star (top image) and a basket star (bottom image). An example of a highly effective non-serial hybrid structure with both continuum and discrete elements in nature. Adapted from Kunstformen der Natur, Ernst Haeckel, 1899-1904.
A key question raised by the earlier discussion is how motions for soft continuum robots should be planned and controlled. Motivated by the examples from nature reviewed here, we argue that simplifications should be sought where possible, as discussed in the previous subsection. The strategy of restricting and controlling movements to a plane is appealing and clearly successful for many animals, and we believe likely to be most practical for continuum robotic elements. For hybrid robots combining continuous and discrete parts, it would appear to be best for the discrete part of the robot to be controlled continuously (and vice versa), so that the discrete part is concerned with precision and the continuum part with more global environmental accommodation. For example, the fractal-like pattern of the basket star end-effector design would be hard to control continuously, so the discrete control of the continuum elements would be most appropriate.
Additionally, it seems clear that the structure of these new forms of robots with soft continuum elements should be dependent upon the environment they will operate in. The traditional approach of building general-purpose robots has only been partially successful. While traditional robots are used for a variety of tasks in structured environments, typically those environments have been heavily engineered to fit the robots' capabilities. Therefore, robots have not significantly penetrated the inherently unstructured environments of the “real world”. Soft continuum robots are explicitly intended to enter that world, and the lesson from their counterparts in the natural world is that success generally implies specialization and matching to the environment. We believe that, at least in the medium-term, the same is likely to be true for continuum robots.
Finally, notice that there are other types of locomotion not discussed here and for which soft continuum robots might be useful. Some animals can configure their bodies to roll around like wheels [4]. In nature, the caterpillar of the mother-of-pearl moth and the stomatopod shrimp (Nannosquilla decemspinosa) are two of the few rolling animals [2]. There are many types of robots that mimic the legged locomotion of animals, but wheeled robots are more common and more practical at this time. Rolling is usually a secondary form of motion in nature, with the primary form being legged locomotion. Rolling is complex to control and a non-wheeled rolling continuum robot would be hard to steer with no stable base for sensors. However, new types of modular and shape shifting robots might find this mode useful in the future.
4. Conclusion
We have discussed the design and operation of the emerging class of soft and continuum robots, contrasting the state-of-the-art in robotics to date with their counterparts in the natural world. We note that natural continuum locomotors or manipulators almost invariably use design modifications or specialized “tricks” to simplify their operation. The complexity reduction achieved is usually based on the synergy of soft continuum elements with hard discrete elements (in the structure and/or operation of the robots).
We introduce the innovations in continuum robot operation suggested by the observations made above. The conceptual ideas are supported by experiments using the “Tendril” continuum robot. The results suggest new ways in which continuum robot operations could be significantly enhanced. In particular, the exploitation of “hard and discrete” environmental features is shown to enhance stability in continuum robot operations. Operation in this mode would allow continuum robots to better exploit their inherent advantage (over conventional, high precision, rigid-link-based robots) of backbone adaptability, while compensating for the corresponding disadvantage (the effects of environmental disturbances on their inherently compliant backbones). Additionally, the incorporation of discrete behaviours (sweeping and striking with the backbone) can enable new impulsive manipulation modes. Note that conventional discrete rigid-link-based robots are traditionally controlled in a continuous manner, even when operating in “point-to-point” mode. The dual concept of operation of continuum robots in “discrete” mode can compensate for imprecision in continuum robot shape control.
We have discussed the implications for complexity reduction and design in continuum and soft robots. A key inference is that construction of soft continuum robots should depend upon the environment they will be used in. It also appears that the appropriate combination of continuum and discrete - or soft and hard - elements is likely to significantly improve the performance of these robots.