
Abstract
This corrigendum is offered as a means to correct errors in “Determination of an Optimal Return-path on Road Attributes for Mobile Robot Recharging” (Fei Liu, Shan Liang, Xiaodong Xian, International Journal of Advanced Robotic Systems, vol.8, no.5, pp. 83–92, 2011). The error is due to the fact that we reckoned without taking into account the energy consumed by the sensors on the robot. Please see the corrections below.
Page 85–86
(1) In column 2, the last paragraph should read:
(c) The cost that the robot will pay for passing each segment includes two parts: energy consumption ce and the influence of vibration on the robot body cb that describes the probability of the robot's equipment failure.


Page 86
In column 2, the chapter title “4.2.1 Mathematical Model of ce “ should read: “4.2.1 Mathematical Model of ĉe”. In column 2, the paragraphs after Equation (9) and before Equation (11), all ce should be replaced by ĉe. In column 2, Equation (10) should be
In column 2, Equation (11) should be


Page 87
(1) In column 2, Equation (20) should be

Page 88
(1) In column 1, after Equation (25) in chapter 4.2.2, the following should be added:
4.2.3 Mathematical Model of cs

(2) In column 2, chapter title “4.2.3 Computing the Idle Time” should be replaced by “4.2.4 Computing the Idle Time”.
Page 89
(1) In column 1, after the first paragraph in chapter 5.1, the following should be added:

We assume that the robot walking for distance pml at average speed v̄ (unit: m/s), then

In our experiment, we set Vstart = 12.7V, Vend = 11.3V, v̄ = 0.75m/s, then it is measured that t = 4.5h, therefore, rs is measure to be

(2) Equation (38) should be

(3) Equation (39) should be

(4) Equation (40) should be

(5) Equation (41) should be

(6) Equation (42) should be

Page 90
(1) Equation (45) should be

(2) In the penultimate paragraph of column 2, the following corrections should be made:
As listed in Table 2, the cost CRD0n is (0.0520,0.8693×10−3) and the idle time TIDLE_ RD0 is 346.834s.
The optimal return-path to each dock Dh(h = 0, 1, 2) as well as the constitution of each RDh (h = 0, 1, 2), the total path length LT, the cost and the idle time.
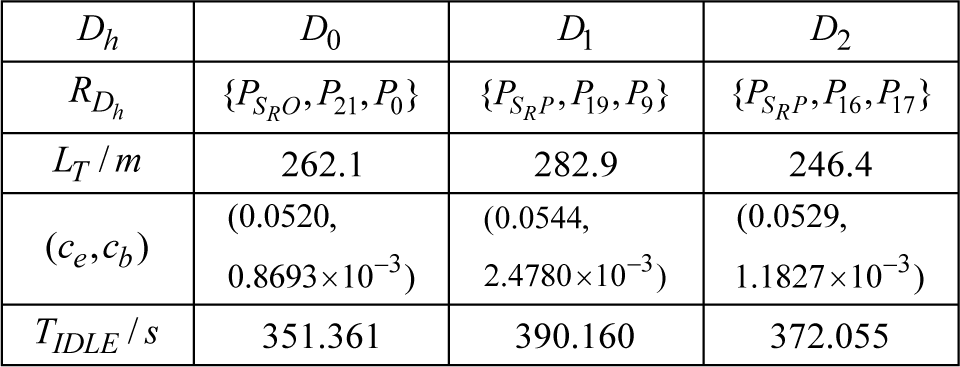
| Dh | D 0 | D 1 | D 02 |
| RD h | {PSRO, P21,P0} | {PSRP, P19,P9} | {PSRP, P16,P17} |
| LT/m | 262.1 | 282.9 | 246.4 |
| ( C e , C b ) | (0.0520, 0.8693 ×10−3) | (0.0544, 2.4780 × 10−3) | (0.0529, 1.1827 × 10−3) |
| TIDLE /S | 351.361 | 390.160 | 372.055 |
(3) Equation (50) should be

Page 91
(1) Table 2 should be replaced by
(2) In column 2, in the paragraph below Table 2, the following corrections should be made:
Statistically, if the robot returns to recharge four times a day on average and δTIDLE = 20.694s is taken as an example, (3) Equation (51) should be

(4) Equation (52) should be
