
Abstract
This paper develops a robust adaptive control for a class of nonlinear systems using the backstepping method. The proposed robust adaptive control is a recursive method based on the Lyapunov synthesis approach. It ensures that, for any initial conditions, all the signals of the closed-loop system are regularly bounded and the tracking errors converge to zero. The results are illustrated with simulation examples.
1. Introduction
In recent decades, a large number of papers have studied the problem of robust adaptive control of nonlinear systems (see, e.g., [1-15] and references therein). In [1], a new adaptive law based on an optimal control formulation for the minimization of the L2 norm of the tracking bounded error is considered. A method for designing a global adaptive neural network controller for a class of uncertain non-linear systems is proposed in [2]. In [3-9], adaptive control of uncertain nonlinear systems using backstepping is developed. In these papers, the backstepping method guarantees global stabilities, tracking and transient performance for a broad class of strict-feedback system. New adaptive feedforward cancellations (AFC) control providing periodic tracking and/or periodic disturbance rejection is proposed in [10]. In [11], a robust control system combining backstepping and sliding mode control techniques is used to realize the synchronization of two gap junction coupled chaotic FitzHugh–Nagumo (FHN) neurons in the external electrical stimulation. The paper [12] introduces an optimal H∞ adaptive PID (OHAPID) control scheme for a class of nonlinear chaotic system with uncertainties and external disturbances. In [13], an adaptive backstepping control scheme is proposed for task-space trajectory tracking of robot manipulators. In [14], an adaptive integral backstepping algorithm is proposed as a means to effectuate the attitude control of a 3-DOF helicopter. In [15], a backstepping approach is used for the design of a discontinuous state feedback controller for the controller.
The main contribution of this paper is the design of an adaptive backstepping control method for a class of uncertain single input single output nonlinear systems which can be transformed into a triangular form. Many systems, such as AC motors, spacecraft, magnetic suspension and robot manipulators, possess this structure [14]. These systems can be built from subsystems that can be stabilized [14, 15]. In this paper, we assume that the bounds of the uncertainty system parameters are available. The adaptive calculating procedure of the control is a recursive procedure based on the Lyapunov approach. It is composed of several steps. It can start at the known-stable system and back out new controllers that gradually stabilize each outer subsystem. The procedure stops when the final external control is reached. Compared with the adaptive control scheme, the proposed control approach has the advantages of adaptive technique and robust control, which makes this approach attractive for a wide class of nonlinear systems with both uncertain nonlinearities and disturbances.
This paper is organized as follows: the formulation of the problem is introduced in Section 2; the controller design and stability analysis are presented in Section 3; the results of the simulation, illustrating the efficiency of the proposed controller, are presented in Section 4.
2. Problem statement and preliminaries
Let us consider the following nonlinear system

where: x̄i = [x1,…,xi]T ∈ ℝi is the state of the i-th subsystem; x̄n = [x1,…,xn]T ∈ ℝn, u ∈ ℝ and y ∈ ℝ are the state, the input and the output of the overall system, respectively; hi(x̄i) ∈ ℝ, i = 1,…,n are the known functions; Δi(x̄i) are unknown Lipschitz continuous functions such that:

where: li are known constants.
The known functions φi(x̄i) ∈ ℝ are defined as
The purpose of this paper is the design of a control u that ensures the tracking output y sticks to a specified trajectory yd ∈ ℝ so that all system variables are bounded.
The desired reference signal yd(t) is of class C∞, t ≥ 0 well as yd, ẏd,…, yd(n-1), yd(n) are known and bounded. The tracking error is defined as

The determination procedure of the control u is presented in the next section.
3. Robust adaptive controller design and stability analysis
The control u is calculated using the backstepping method. The calculation procedure involves n steps. From step 1 to stepn-1, the virtual control inputs γi, = 1,…,n-1 are designed, respectively. The practice control input u is built at step n. The detailed design is described in the following steps [3-9, 11, 13-15].

Introducing the variable:

We then choose:

where:
The parameter c1 ∈ ℝ is selected such that c1 > 0.
For p ≫ 1, a smooth approximation of the sgn function is

The relationship (9) is usually used to reduce the chattering which is caused by the sgn function [16].
Therefore, the equation (7) can be written in the following form

Consider the following Lyapunov function candidate

By using (1), (5), (6), (9) and (10), the time derivative of V1 is

where the coupling term φ1(x1)λ1λ2 will be cancelled in the next step.

The variable λi+1 is as follows


The Lyapunov function candidate is defined as:

Its derivative is:

When i = n – 1, (17) can be rewritten as:

The time derivative of λn is given by:
We choose cn ∈ ℝ such that

We consider the Lyapunov function candidate:

The time derivative of Vn is

At the end of the backstepping procedure, we take:

Then, the time-derivative of Vn satisfies the following condition:

Let us consider:

Therefore, we obtain:


This implies that:

From (28), it is easy to see that
This completes the proof.
4. Simulation examples and discussion
In this section, the feasibility of the proposed method and the control performances are illustrated with three examples. The simulation results are carried out using the software MATLAB.
Example 1
For the simulation example 1, we consider the following nonlinear system
where: u and y are the control signal and measured output, respectively; |Δ1(x1)|≤0.1 and|Δ2(x1, x2)| ≤ 0.2. The aim of the control is to force the output y = x1 to asymptotically track a reference signal yd. Using the controller design procedure described in section 3, we can write:

We choose c1 = 1, c2 = 2 and ρ = 105.
Then, the control input becomes:
Such as

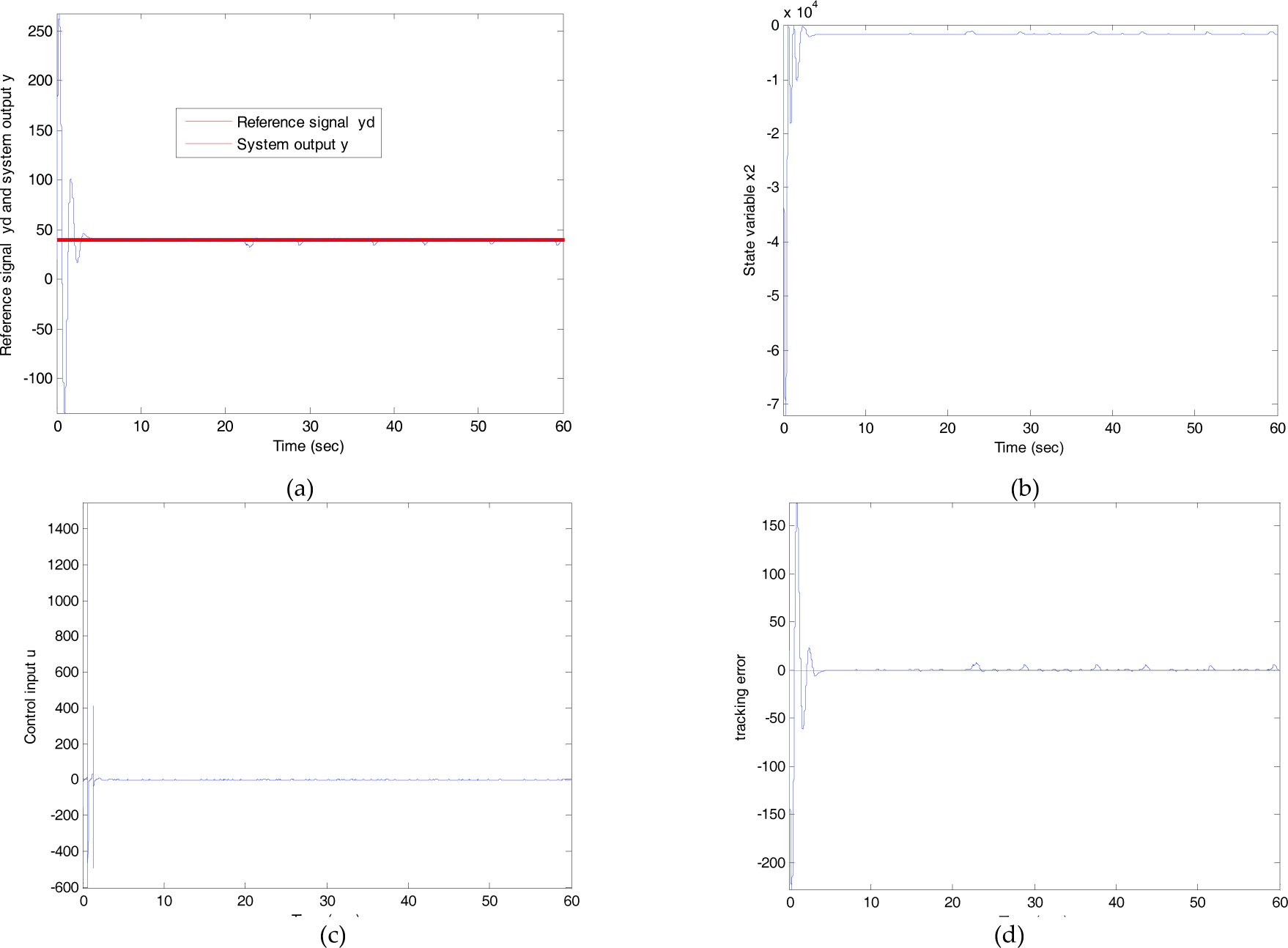
The simulation results for the initial states (x1(0) = 20,x2(0) = −25) are shown in figures 1-2. It can be seen that the output of the closed-loop system tracks the reference signals.
Simulation results if yd

Simulation results if
Example 2
For the simulation example 2, we consider the nonlinear system, which is described as

where: u and y are the control signal and measured output, respectively; |Δ1 (x1)| ≥ 10 and |Δ2 (x1,x2)| ≥ 20.
The objective of the control is to force the output y = x1 to asymptotically track a reference signal yd. According to the described controller design procedure in section 3, we have:

We choose c1 = 1 and c2 = 2.
Then, we can obtain the control input

Such that

For the initial states (x1 (0) = 50, x2 (0) = −50), simulation results are presented in figures 3-6. From the results, we find that the output of the closed-loop system tracks the reference signals. It can be seen that the chattering amplitudes have been effectively reduced where ρ = 100 compared to where ρ = 105.

Simulation results if

Simulation results if

Simulation results if yd (t) = 20 and ρ = 105: (a) system output y = x1 and the reference signal yd; (b) State variable x2; (c) control input u; (d) tracking error yd – y
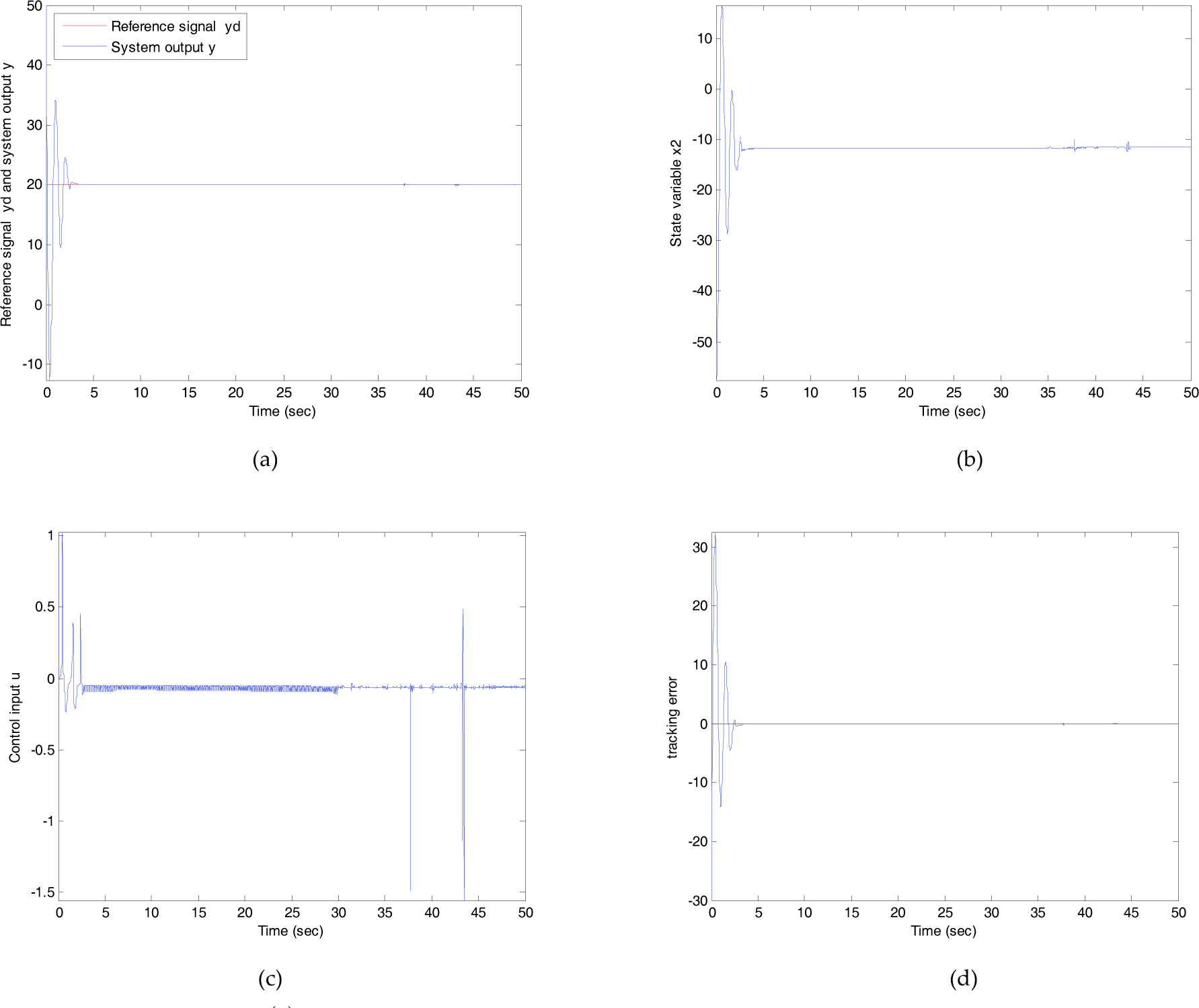
Simulation results if yd (t) = 20 and ρ = 100: (a) system output y = x1 and the reference signal yd; (b) State variable x2; (c) control input u; (d) tracking error yd – y
Example 3
For simulation example 3, we consider the following nonlinear system, which is defined as

where: u and y are the control signal and measured output, respectively; |Δ1 (x1)| ≤ 20 and |Δ2 (x1,x2)| ≤ 30.
The objective of the control is to force the output y = x1 to asymptotically track a reference signal yd. According to the described controller design procedure in section 3, we have:

We choose c1 = 1 and c2 =2.
Then, the control input is designed as

Such that


Simulation results if yd (t) = 100 and ρ = 100: (a) system output y = x1 and the reference signal yd; (b) State variable x2; (c) control input u; (d) tracking error yd – y
For the initial states (x1 (0) = 10,x2 (0) = −10), the results of the simulation are shown in figures 7-10. It can be concluded that the output of the closed-loop system tracks the reference signals very well. The value of the parameter ρ has an influence on the chattering amplitudes. Furthermore in the three examples, we notice that all the signals of the resulting closed-loop systems are regularly bounded and the tracking error converges to zero.

Simulation results if yd (t) = 100 and ρ = 105: (a) system output y = x1 and the reference signal yd; (b) State variable x2; (c) control input u; (d) tracking error yd – y

Simulation results if yd(t) = sin(πt) and ρ = 100: (a) system output y = x1 and the reference signal yd; (b) State variable x2; (c) control input u; (d) tracking error yd – y

Simulation results if yd (t) = sin(πt) and ρ = 105: (a) system output y = x1 and the reference signal yd; (b) State variable x2; (c) control input u; (d) tracking error yd – y
5. Conclusion
In this paper, we propose a method of designing an adaptive controller for a class of nonlinear systems using the backstepping technique. The on-line calculation of the control input is obtained using the Lyapunov synthesis approach. The proposed approach guarantees that all the signals of the resulting closed-loop systems are regularly bounded and the tracking error converges to zero. It has advantages, such as a simple structure, easy realization, a good control effect and strong robustness. The efficiency of the proposed control has been demonstrated by simulation studies. Future works could expand the method to be used for a more general class of uncertain nonlinear systems.