
Abstract
Attitude control is the inner-loop and the most important part of the automatic flight control system of an unmanned aerial vehicle (UAV). The information fusion-based optimal control method is applied in a UAV flight control system in this work. Firstly, a nonlinear model of alterable thrust direction UAV (ATD-UAV) is established and linearized for controller design. The longitudinal controller and lateral controller are respectively designed based on information fusion-based optimal control, and then the information fusion flight control system is built up. Finally, the simulation of a nonlinear model described as ATD-UAV is carried out, the results of which show the superiority of the information fusion-based control strategy when compared to the single-loop design method. We also show that the ATD technique improves the anti-disturbance capacity of the UAV.
Keywords
1. Introduction
In recent years, unmanned aerial vehicles (UAVs) have been widely used for military applications and also for civil use [1]. An advanced flight control strategy is indispensable for the autonomous flight of UAVs. Reference [2] applies the LQG method that requires rate feedback and a H∞ controller only by properly choosing the weighting functions, which meet the performance requirements for a vertical short take-off and landing aircraft. A method of optimal flight control for a rigid body model has been proposed in [3]. All parameters of the point mass model need to be determined by comparison with the flight simulations. In the attitude control loop, four control signals should be properly produced. In the case of the moderate and the short-time flight manoeuvres, both flight trajectories also respond approximately. Neural networks can be used in flight control systems to improve the adaptive performance, by compensating the system uncertainties and thus adapting to the variations of flight conditions, while accommodating the control system failures [4]. A neural network-based direct-adaptive controller is proposed for an unstable UAV. The control law is developed to track the pitch rate command. A neural network with linear filters and a back propagation learning algorithm is used to approximate the control variable. The bounded signal requirement is circumvented in the design of the neural controller, providing stability and tracking performances. An on-line learning scheme is adopted to compensate for uncertainties due to variations in aerodynamic coefficients, control surface failures and centre of gravity position. The performance of the above control method is validated in [5] under different flight conditions.
Furthermore, an intelligent control strategy based on a brain emotional learning (BEL) algorithm which is based on the emotional learning process in the amygdale-orbitofrontal system of the mammalian brain is investigated in [6] for application in UAV attitude flight control. The UAV is in flat flight with wind disturbance, and a BEL-based intelligent controller (BELBIC) is applied to improve the attitude stability control performance of the UAV. In [7], fuzzy logic modules are developed in the autonomous controller for altitude control, speed control and heading control, through which the global positions of the aircraft are well controlled. In [8], a genetic algorithm (GA) is used to meet the requirements of the frequency domain handling qualities for the longitudinal plane, in which the parameters are implemented as fitness functions related to the desired magnitude of bandwidth and time-delay.
The thrust vectoring (TV) technique has been proved to be able to improve the mobility and agility of a manned jet-propelled aircraft [9–12]. The application of TV technology in UAVs is being increasingly studied, and has been successfully demonstrated on several aircraft to provide tactical manoeuvring advantages at slow speed, high attack angle, and prevent the aircraft from loss of control due to aerodynamic surface saturation. However, TV technology may have a potentially significant pay-off in some critical areas, such as vehicle complexity, maintenance, and total cost of ownership.
With reference to the TV technique of jet-propelled aircraft, an alterable thrust direction (ATD) technique is presented for screw propeller aircraft, which essentially vectorizes the thrust of the screw propeller engine. The objective of this work is to employ a new modern optimal control named information fusion control for an ATD-UAV. This information fusion control is an optimal control based on information fusion estimation.
The remainder of this paper is organized as follows. Section 2 derives the nonlinear dynamic model of the ATD-UAV. In section 3, linear models of the ATD-UAV are given, in which the thrust deflection angles are treated as the additional control variables. The information fusion-based optimal controllers are designed in section 4 and the simulations are carried out in section 5. Finally, conclusion is drawn in section 6.
2. Nonlinear Model of the ATD-UAV
In order to express the nonlinear model of the ATD-UAV, the input-output relationship and the inner constitute should be established. A nonlinear model with total variable for an ATD-UAV consists of dynamic equations and kinematic equations. The former includes force equations and moment equations, while the latter includes navigation equations and motion equations. The variables' definitions are given in Table 1.
Variables definition
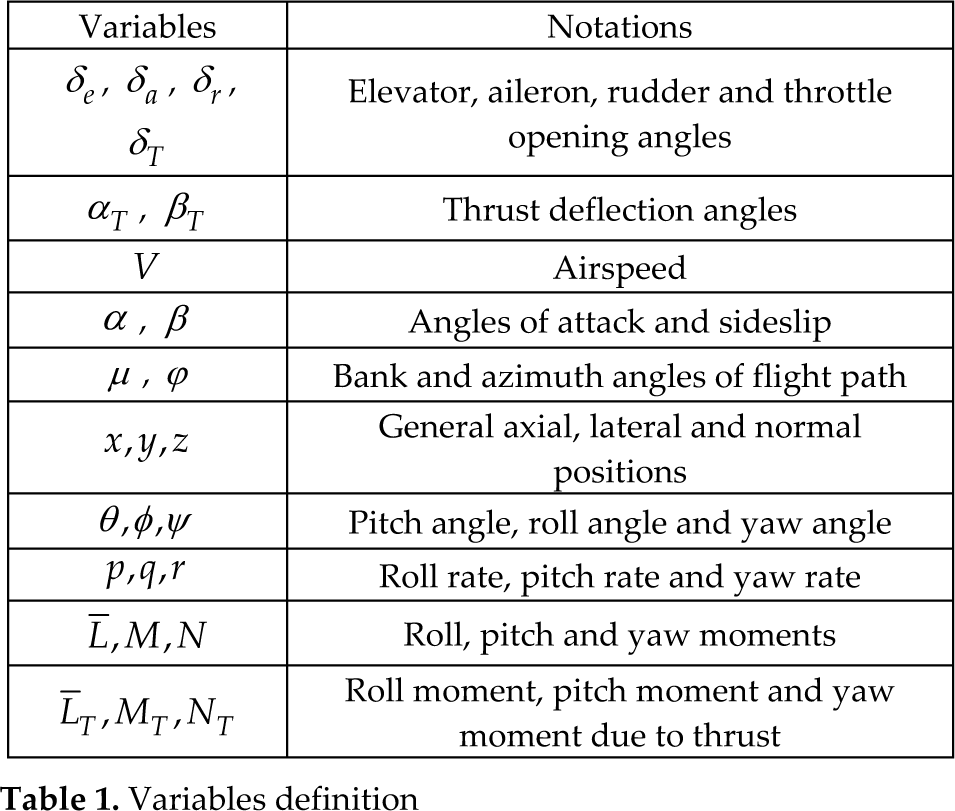
Compared to traditional UAVs, the mathematical model of this ATD-UAV has several unique features. There are thrust components on the yb and zb axes of the body axis system, while there are none of these components for traditional UAVs. Thus, the total force and moment of the ATD-UAV are different to a traditional UAV. Therefore, the dynamics of the ATD-UAV is different to that of a traditional UAV. The corresponding kinematics properties are also different.
For this ATD-UAV, the three components of thrust on the body axis system are given by

For a traditional UAV, α T = β T = 0, Tx = T, Ty = Tz = 0.
The three components of thrust on the body axis system of the ATD-UAV are given by

Thus, the force equation, the moment equation, the navigation equations and motion equations of the ATD-UAV can be easily derived according to the dynamic model of the traditional UAV.
3. Linear Models of the ATD-UAV
In order to use the modern control theory, the nonlinear model is usually linearized by using the small perturbation method. According to the nonlinear kinematic equations, when the UAV is in level and no-sideslip flight, the kinematic equations can be divided into longitudinal and lateral kinematic equations which are decoupled. The linearization of the nonlinear equation is always conducted in an equilibrium state. For the ATD-UAV, after the linearization process, we get the linear longitudinal motion equations


The lateral motion equation is given by
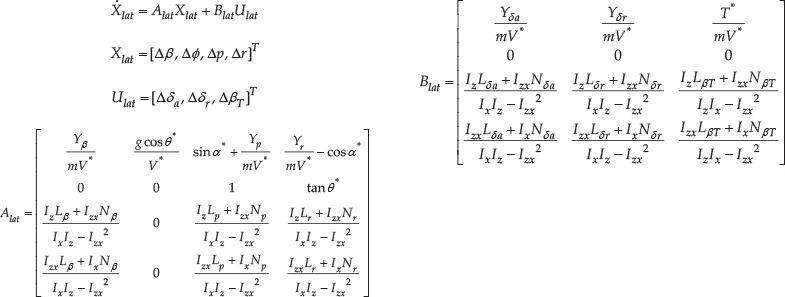
Given the above linear models of the ATD-UAV, the natural properties can be analysed. Furthermore, the information fusion-based attitudinal controllers can also be designed, as shown in the following section.
4. Information Fusion Estimation-Based Optimal Control For the ATD-UAV
4.1 Information Fusion Estimation Theory
Li Xiao Rong puts forward the optimal fusion rules based on the linear estimation of minimum variance [13]. From the perspective of information fusion, Zhi Sheng Wang and Ziyang Zhen put forward information fusion control methods, which take the desired tracking information, system dynamic information and ideal control strategy information as measure information of the control variables [14–16].
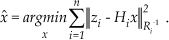
Assume that a measurement

where
The information weight of information on itself and its co-variance are generally reciprocals of each other. Thus we get the following definitions.
I[zi|zi] = Ri−1: information weight of zi about itself;
I[zi|x] = HiTRi−1Hi: information weight of zi about x.
Then the information weight of x about x is

which shows that the information weight of x about x is equal to the sum of the information weight of zi about x. If I[◯|x] is non-singular, then the optimal estimate of the state x is expressed by [14]
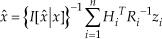
Equation (5∼8) is a uniform linear model of information fusion estimation. Equation (5) is also called an information expression in information fusion fields.
4.2 Longitudinal Information Fusion Controller
For the studied ATD-UAV, the throttle opening angle is always set to be constant in cruise flight to save fuel.
Hence, a linear discrete time system of longitudinal channel of ATD-UAV can be derived from (3) - shown as

where Ulon,2 is the throttle opening Ulon,2 = Δδ T .
The design of the longitudinal controller is such that we obtain the optimal control sequence to make the UAV's longitudinal states keep the equilibrium states and make the following LQ performance index function minimum.

where Xlon*(k)=0 is the desired state vector, Qlon and Rlon are positive definite matrices, and N is the terminal time.
The solving steps based on the sequential information fusion method are as follows.
Step 1: From performance index function, we get an information expression as


where
Step 2: Assume the co-state optimal estimation X̂lon(j + 1) and its information weight Plon−1(j+1) are obtained, j = k+1, k + 2,…, N, then we get an information expression as

where E[w(j + 1)] = 0, var[w(j +1)] = Plon (j +1). Submitting the system dynamic equation (9) and the control sequence soft constraint information expression (11) into (13), we get


Step 3: Information expression can be derived from the performance index function, described as


where Xlon*(j) = 0, E[m(j)] = 0, var[m(j)] = Qlon−1. Step 4: By fusing the above information, we get the optimal fusion filtering of the co-state sequence and information weights as


where X̂ lon (N + 1) = 0, Plon−1 (N + 1) = 0 By iterative calculation of (18∼19), X̂ lon (k + 1) and Plon−1(k + 1) can be obtained. Then we get the following information expressions.


Step 5: By fusing the information of X̂ lon (k + 1) and Ulon,1*(k) on control sequence, we get the optimal fusion estimation of control sequence as

where Plon(k) is a symmetrical nonnegative definite matrix, satisfying the following Riccati difference equation

For above Riccati difference equation, given any semi-positive matrix P0−1, when N→ ∞, based on optimal control theory, we get

Here j ∈ [k+1, km] and k is big enough. Hence, let Plon−1 replace Plon−1(j), then co-state filter (18∼19) becomes


According to the convergence theorem of iteration method in numerical analysis theory, when

it has

Therefore, the approximate optimal estimation of co-state and optimal control sequence are respectively rewritten as


4.3 Lateral Information Fusion Controller
The linear discrete time system of lateral channel of ATD-UAV can be derived from (4), given by

By solving the discrete state regulator problem that making the following linear quadratic performance index minimum, the optimal control sequence.can be obtained.
here Qlat(k) = QlatT(k) > 0, Rlat(k) = RlatT(k) > 0.
The solving steps of optimal control sequence based on the sequential information fusion method are as follows.
Step 1: An information expression can be obtained from the performance index function


where Ulat*(k)=0, E[n(k)] = 0, var[n(k)] = Rlat−1.
Step 2: Assume the co-states optimal estimations {X̂ lat (j + 1), Plat−1(j+1), j = k+1, k + 2,…,N} are obtained, then we get an information expression as

where E[w(j + 1)] = 0, var[w(j + 1)] = Plat(j + 1). Submitting (31) and (33) into (35), we get


Step 3: The information expression can be derived from the performance index function, described as


where Xlat *(j) = 0, E[m(j)] = 0, var[m(j)] = Qlat−1.
Step 4: By fusing the above information, we get the optimal fusion filter of the co-state sequence as


where X̂ lat (N + 1) = 0, Plat1(N + 1) = 0. Thus we get X̂ lat (N) = 0, Plat−1(N) = Qlat, and X̂ lat (k + 1) =X̂ lat (k + 2) = … = X̂ lat (N) = 0.
Step 5: After {X̂ lat (k + 1), P lat −1(k + 1)} are obtained, an information expression can be obtained as

where E[w(k + 1)] = 0, var[w(k+1)] = Plat(k + 1).
Submitting (31) into (42), the soft constraint information of X̂ lat (k + 1) on Ulat(k) can be expressed as


Step 5: By fusing the information of X̂ lat (k + 1) and Ulat *(k), we get the optimal fusion estimation of the control sequence as

where Plat (k) is symmetrical nonnegative definite matrix, satisfying the following Riccati difference equation

Based on the above fusion control laws of the attitudes of the ATD-UAV, a flight control system scheme is designed as shown in Figure 1. Variables with “*” denote the flight states under equilibrium conditions.

Attitude stable fusion control system
5. Simulation Study
5.1 Traditional Control Responses
This section provides the simulation results conducted with the ATD-UAV. Suppose the ATD-UAV is in the straight-and-level flight with a flight speed of Vd=50m/s, and that it is suddenly disturbed by a wind: Vaero =20m/s, θaero =45°. The controlled object is represented by a nonlinear model, in which the aerodynamic parameters are obtained by wind tunnel tests. The controller is designed by the traditional single-loop method.
Figure 2 shows the responses of the pitch angle, pitch angle rate, roll angle, roll rate, yaw angle, yaw rate, elevator output, aileron output, rudder output and thrust angle. As can be seen from Figure 2, we get that ATD control can decrease the magnitude of change caused by the wind disturbance. Turbulence magnitudes on the attitudes of the hybrid control are smaller than those of the pneumatic rudder control, which means that the ATD technique is useful in enhancing the flight attitude maintaining performance in wind turbulence. Moreover, with the pneumatic rudder control, the rudders tend to saturate under strong wind disturbance. However, the ATD technique overcomes this problem, and compensates the effectiveness of the pneumatic rudder control.
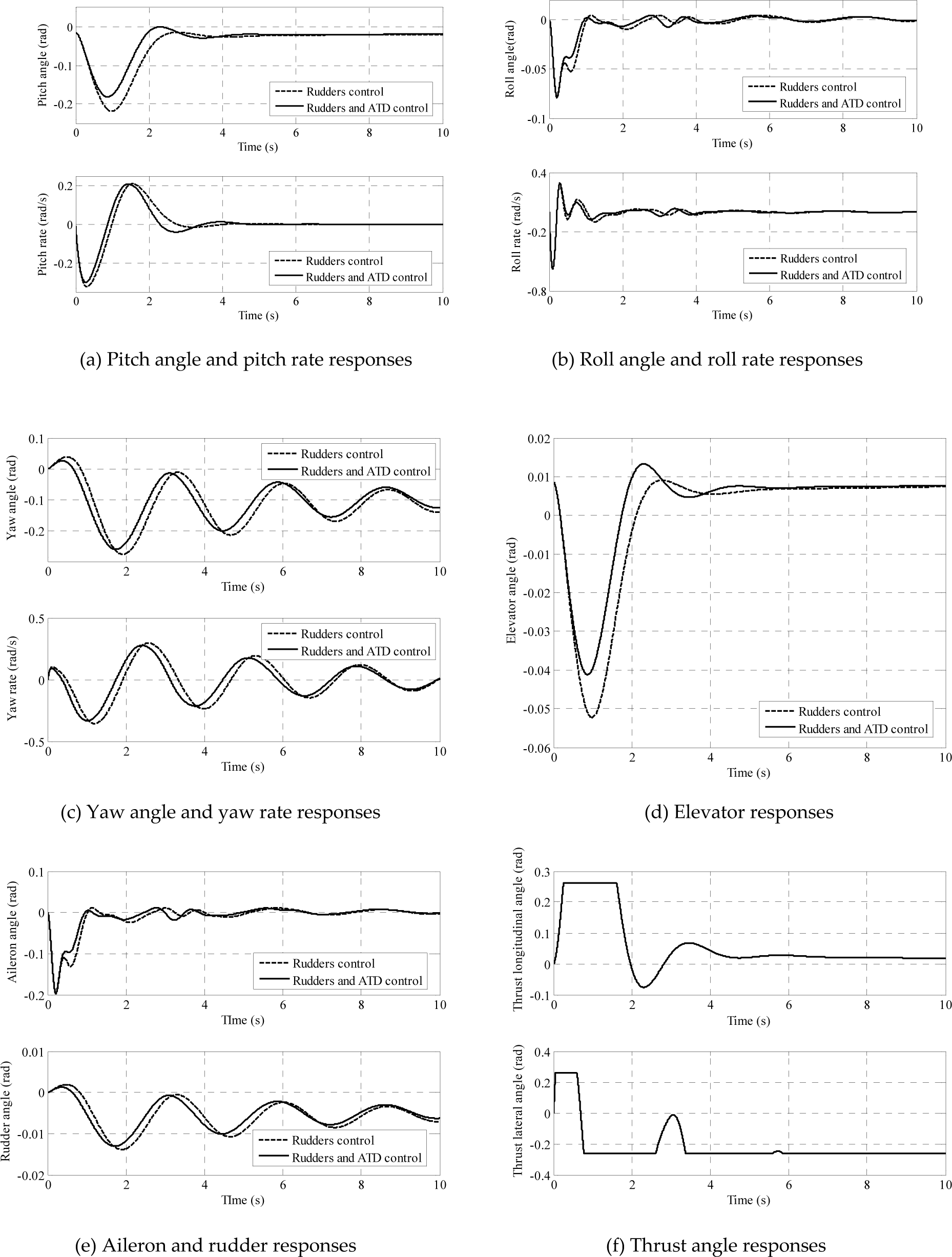
Traditional flight control responses
5.2 Information Fusion Control Responses
Under the same simulation conditions using the traditional control, the information fusion control is investigated. Beforehand, the weight matrices of the information fusion control are determined. Simulation results are shown in Figure 3.

Information fusion flight control responses
As can be seen from the above results, the ATD technique is able to improve the manipulation effectiveness of the aircraft and decrease the rudder angles, which can avoid the adverse case of rudder saturation. Similar with the traditional control, the ATD technique in information fusion control also plays an important role in compensating the rudders.
Furthermore, compared with traditional control, information fusion control has better responses in flight attitude stability, which shows that as a multivariable control method, it is better than the single-loop design method for aircraft flight control systems.
6. Conclusion
As is well-known, the efficiency of the rudders is greatly reduced when the UAV is in low speed flight. In this work, for the ATD-UAV, the ATD technique is applied supplementary to the rudders in controlling the UAV. A novel optimal control method based on information fusion is used to design the longitudinal controller and the lateral controller. Simulation results verify that the ATD technique compensates the effectiveness of the rudders to improve the manipulation performance, also showing that the proposed modern control method improves the anti-wind disturbance performance, which is stronger than the traditional single-loop method.
However, in order to extend the thrust nozzle life, the ATD technique is activated only when the conventional aerodynamic control surfaces are insufficient, i.e., they are unable to generate the necessary forces and moments required for the required manoeuvres. Therefore, the ATD is actually a discontinuous control variable and normally inactive for the UAV with a low attack angle, high speed and low altitude.
Footnotes
7. Acknowledgements
This study was supported by the NUAA Fundamental Research Funds (no. NS2013029, NP2011012, NN2012101, NP2011049), Aeronautical Science Foundation of China (no.2010ZA52002), and Specialized Research Fund for the Doctoral Program of Higher Education (no. 20123218120015).