
Abstract
The level change mode is an essential part of large civil aircraft automatic flight control systems. In cruise, with the decrease of the plane's weight caused by fuel consumption and the influence of bad weather, such as thunderstorms, the level change mode is required to solve this problem. This work establishes a nonlinear model of large aircraft, takes level changed from 9500m to 10100m as an example to design control laws for the level change mode in cruise. The classical engineering method is used to design longitudinal and lateral control laws synthetically. The flight qualities are considered in the design process. Simulation results indicate the control laws can meet design requirements and have a good anti-gust performance.
1. Introduction
The fly-by-wire automatic flight control system has obvious advantages such as improving handling characteristics, enhancing flight safety, reducing the pilot's operating burden, increasing economic efficiency and so on, so it is an essential part of a large civil aircraft. The automatic flight control system produces and transmits automatic control instructions to achieve automatic or semi-automatic flight path control, or to control the aircraft to restrain all kinds of disturbances automatically. Autopilot, the driving rod/reel manipulation, automatic throttle and structural mode control all constitute the automatic flight control system. In modern aviation, civil aircraft from all over the world all have many kinds of control modes, and can achieve many kinds of flight tasks. So in the phase of automatic flight control system designing, for each mode, it needs a flight control engineer to design control laws that meet the requirements of performance index, which effects the quality of the designed control laws and directly impacts flying qualities and flight safety. In an automatic flight control system, the mode selection panel (MSP) produces a control mode choosing the interface for the pilot. Generally, all control modes can be divided into three categories: vertical mode, horizontal mode and automatic throttle mode. The level change (FLCH or LVL CHG) mode studied in this paper belongs to the vertical mode.
In actual flight, the aircraft is required to change its level according to its own weight, weather conditions and other factors. Generally, the larger the aircraft's weight, the lower the flight level. So with fuel consumption, the aircraft needs to increase cruise level at the same time, and to avoid bad weather such as thunderstorms and upper air conditions, it also needs to change level. The General Flight Rules of the People's Republic of China put in force from November 22, 2007, stipulate that when true course angle is in the range from 0 degrees to 179 degrees, and when height is from 900 m to 8100 m, every 600 m is a flight level. When the height is from 8900 m to 12500 m, every 600 m is a flight level. When the height is above 12500 m, every 1200 m is a flight level. On the other hand, when true course angle is in the range from 180 degrees to 359 degrees, and when the height is from 600 m to 8400 m, every 600 m is a flight level. When the height is from 9200 m to 12200 m, every 600 m is a flight level. When the height is above 13100 m, every 1200 m is a flight level. The flight level equipped standard diagram is shown in Figure 1.

Flight level equipped standard diagram
There are not enough studies on both design longitude and lateral control laws, or testing of the control systems' anti-disturbance abilities. Reference [1] uses nonlinear energy-based control method to achieve civil aircraft automatic landing, where the control system is able to cope with various flight conditions and the stability and performance robustness is guaranteed. Reference [2] applies linear parameter-varying (LPV) control synthesis to design fault tolerant controllers for Boeing 747-100/200. Reference [3] uses the adaptive sliding-mode control method to design the flight path tracking control law of civil aircraft. This method can improve flight performance and at the same time restrain disturbance and model uncertainty. Reference [4] uses the fuzzy control method to design an automatic landing control law. Simulation results indicate the designed control law can achieve flexible and effective automatic landing, and the control system has a better anti-disturbance performance. Reference [5] uses the μ synthesis method to design a robust flight control law. This control system has better dynamic performance and robustness, but the anti-gust ability has still not been tested. Reference [6] uses the LQG/LTR method to design a longitudinal control augmentation system (CAS), which enhances stability, robustness and anti-disturbance capacity, but the simulation is also based on a linear system.
This study focuses on the design of an automatic control system for the level change mode of large aircraft, by using a classical engineering method. This paper is organized as follows. In section 2, a nonlinear model with total variables is obtained for controller design and simulation tests, the linear model is derived and the natural properties are investigated. Section 3 designs a trajectory control system for level change mode and the relative controllers. A simulation study is implemented in section 4. Finally, the conclusions and the acknowledgements are given in section 5 and section 6.
2. Mathematic Model of Large Aircraft
2.1 Nonlinear model
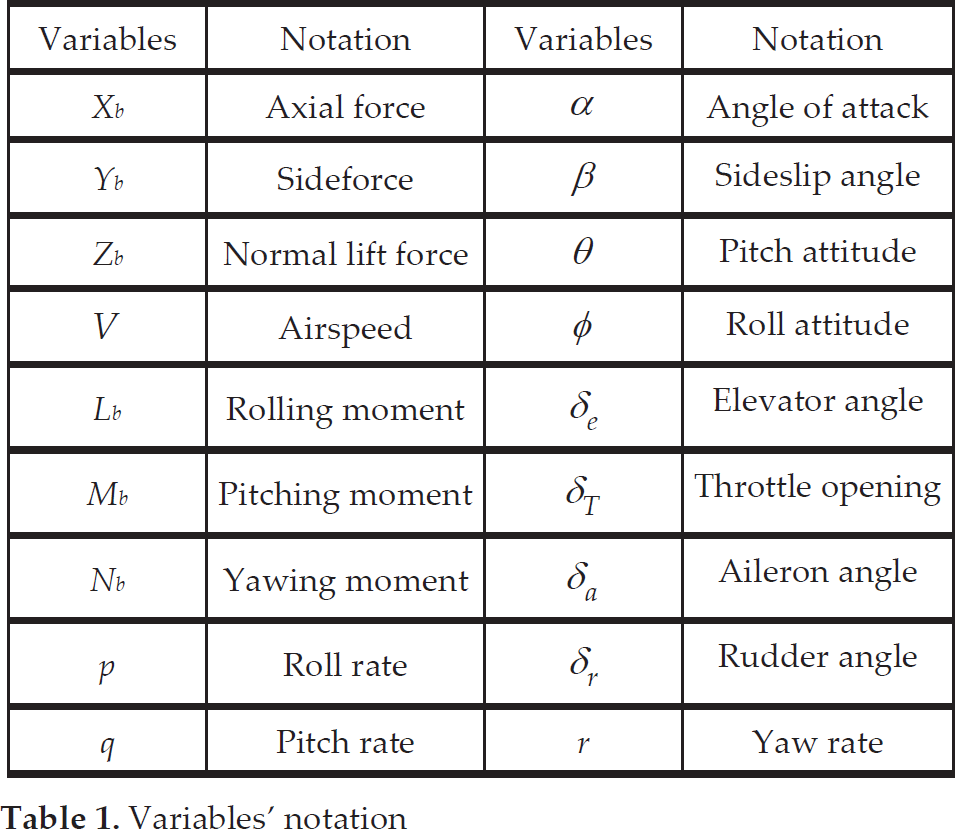
Based on the aerodynamic parameters of the Boeing707, a nonlinear model with total variables is established. The structure of the nonlinear model of the large aircraft is shown in Figure 2 and the variables' definitions are shown in Table 1.
Variables' notation
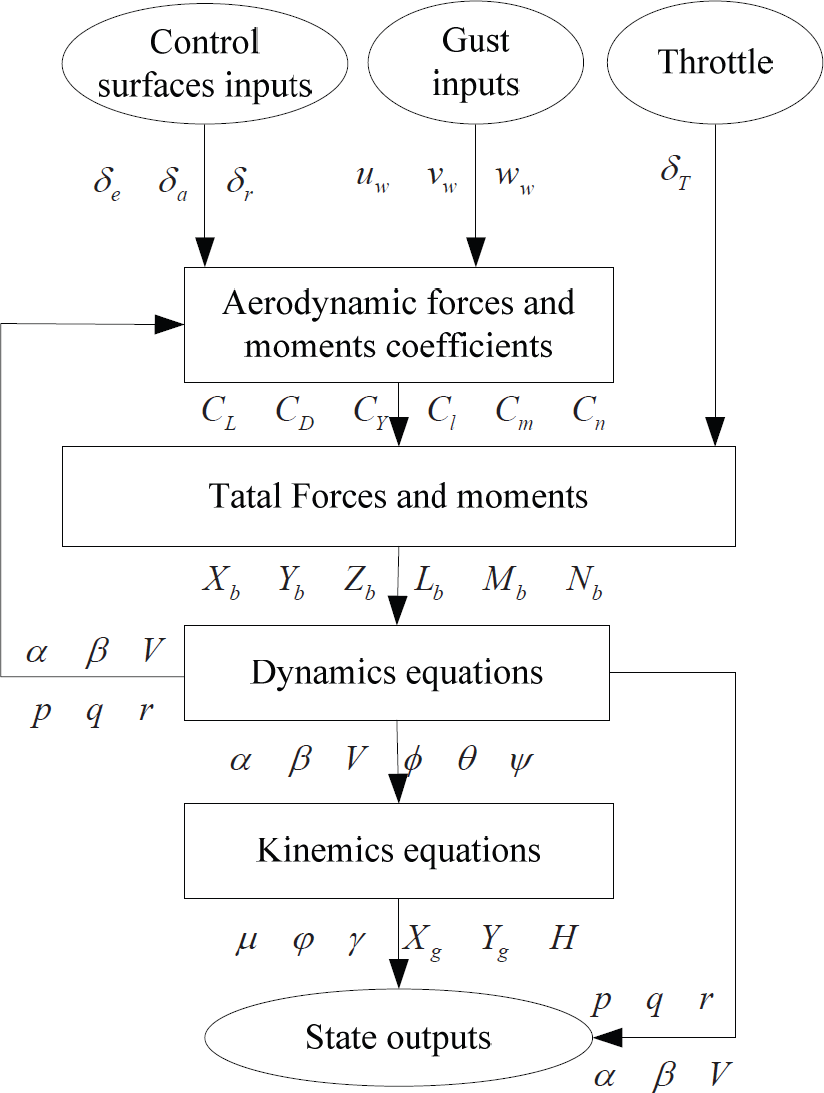
Nonlinear model structure of large aircraft
2.2 Linear model
Level change mode control laws for large civil aircraft in cruise phase are studied in this work. The simulation is in condition of flight level changing from 9500m to 10100m, during the climbing phase. When height changes, so too do air density and air temperature, therefore model parameters will change. However, the height only has small change, thus the model parameters change not too large. So parameters of the middle section can be used to establish the mathematic model of the whole process. The selected trim point is that the cruise height equals 10000m, air speed equals 240m/s, pitch angle and angle of attack both equal 0.26°, and at this time, longitudinal linear formula is shown as

here, state vector x = [ΔV Δα Δq Δθ] T , input vector u = [Δδe ΔδT] T , unit of ΔV is m/s, units of Δα, Δθ and Δδe are all rad, unit of δq is rad/s, ΔδT is opening degree of throttle, its unit is percentage form and the coefficient matrices are as follows.


The linearization formula of the lateral movement is shown as

here, state vector x = [β p r φ], input vector u = [δa δr], the units are the same as that in formula (1) and the coefficient matrices are as follows.

Considering the actual conditions, the transfer functions of engine and throttle servo are respectively given by


The transfer functions of elevator servo system, aileron servo system and rudder servo system are shown as (5). Both of them are inertial first-order systems whose time constants are 0.1s.

The main task of this paper is designing a control law of level change mode for the Boeing 707 in the cruise phase. At first, the simplified transfer function should be obtained by the linear formulas. The simplified transfer functions of longitudinal short-period motion are shown in (6) and (7). The simplified transfer function of longitudinal long-period motion is shown in (8).



2.3 Natural properties analysis
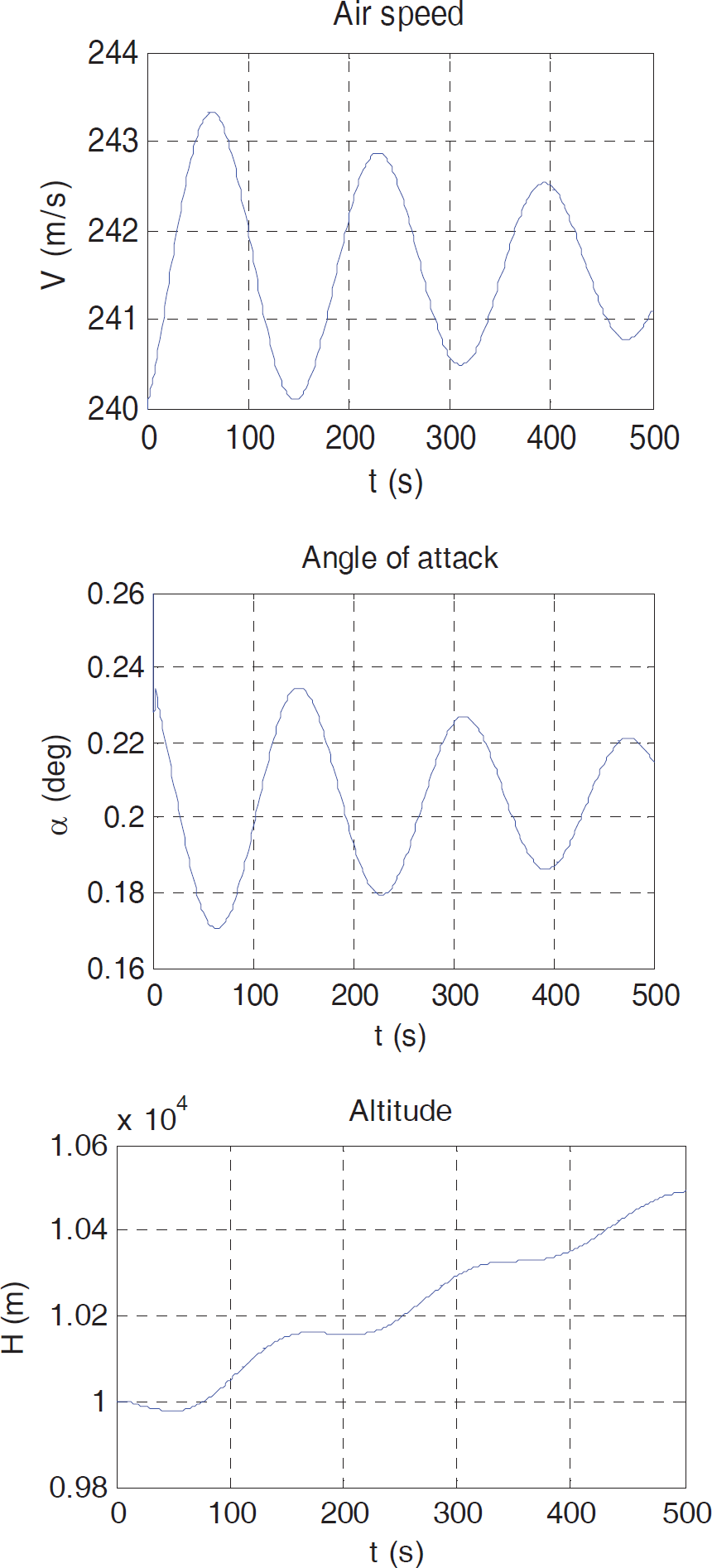
Give the trim values of the large aircraft, the elevator angle is −1.06deg, throttle opening is 9.27%, airspeed is 240m/s, height is 10000m and attack angle is 0.26deg. The responses of airspeed, attack angle and height are shown in Figure 3. As can be seen from the results, the flight states almost keep the trim values, and have a little oscillating with long periods, caused by the small deviations of the given elevator angle and the throttle opening values.

Flight state responses under trim conditions
When the elevator angle increment is 1deg, the flight states responses are shown in Figure 4. Although the aircraft system in trim state is stable, we get that the system without suitable control system is being to diffuse even if the elevator angle is slightly large.
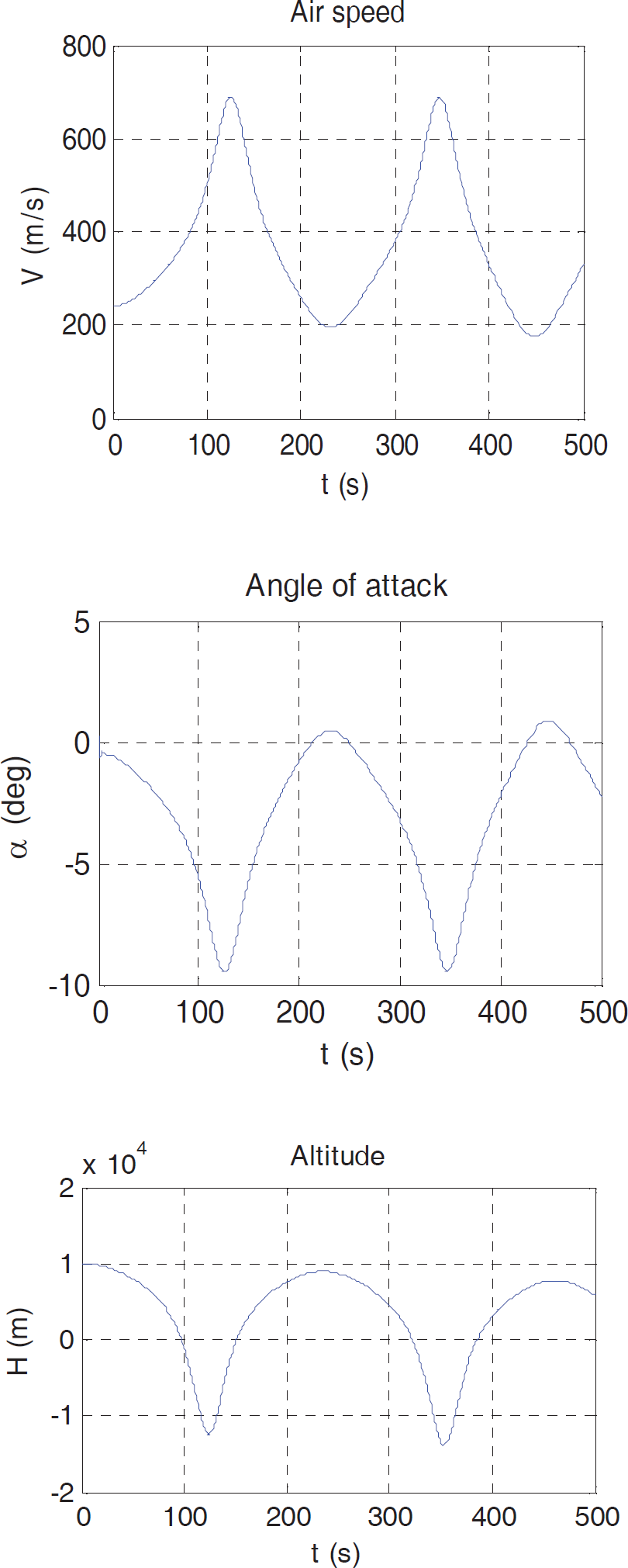
Flight state responses with elevator input
When the throttle opening increment value is 0.01, the flight state responses are shown in Figure 5. We can see that when the airspeed slightly increases, the attack angle slightly decreases and the height increases when the throttle opening increases. If the throttle opening increases too much, this can also make the flight states diffuse.
Flight state responses with throttle input
3. Designing of Control Laws
3.1 Control system structure
From the engineering perspective, in this work the classical control method is used to design the control laws. The control laws are designed step by step from the inner loop to the outer loop. A control structure diagram of the level change mode is established as shown in Figure 6. In Figure 6, the lateral control loop aims to achieve keeping the flight heading, and the throttle channel has a feedback of air speed to achieve keeping the air speed constant.

Control structure flowchart of the level change mode
3.2 Design of control laws
This work focuses on designing an elevator channel control law. The control structure of a longitude elevator channel is shown in Figure 7. In Figure 7, the inner loop is called damping augmentation loop, the outer loops are respectively called pitch angle control loop, vertical velocity control loop and altitude control loop. The design process of the throttle channel and the lateral channel are the same as for the elevator channel – here unnecessary details are no longer given.

Control structure flowchart of the elevator channel
The inner loop of the elevator channel uses the C* control configuration, that is, through feedback of the normal overload nz and the pitch angular rate q, it can achieve improvement of aircraft longitudinal flight qualities. The C* signal is shown as (9), where Vco is cross velocity, according to engineering experience, its value is 120m/s.

Normal overload and angle of attack have a relationship expressed by

Then the C* signal can be expressed by

The transfer function from the elevator deflection angle to the C* signal is shown as

At first, the C* controller must be designed and make C* index in the packet line [7], then use the root locus method to design the pitch angle control law – the whole pitch attitude control law of the elevator channel is shown as

The transfer function of the closed pitch attitude control loop is shown as

In the case of keeping airspeed constant, that is with automatic throttle control, flight path bank angle increment Δμ and pitch angle increment Δθ have a relationship as shown in (15). Flight path bank angle increment and vertical velocity have a relationship as shown in (16).


From (15) and (16), the transfer function from Δθc to ΔḢ is expressed by

Equation (17) is a seven-order transfer function which is not convenient for root locus design, so it can be converted to zero-pole form as

In (18), there are cancellations of zeros and poles, after eliminating two dipoles: P1=-0.58, Z1=-0.5787 and P2=-0.613, Z2=-0.5817, a simplified transfer function is obtained shown as

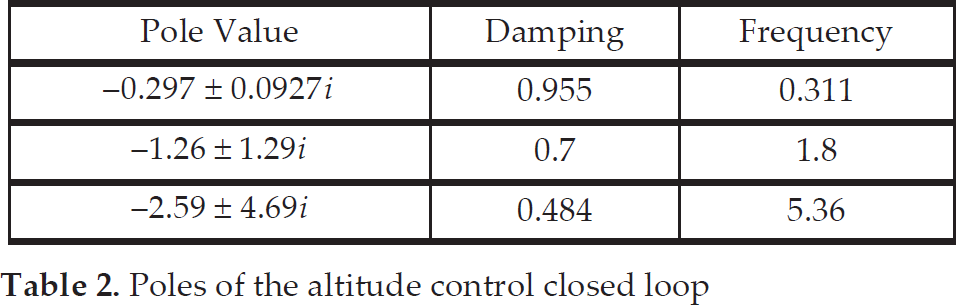
Based on (19), the vertical velocity controller can be designed to achieve tracking control of the vertical velocity command. Through the root locus method, parameters of the vertical velocity controller are designed as P=0.02, I=0.01. The altitude control is the outer loop of the vertical velocity control, when the parameter of the altitude controller is P=0.4, the root locus of the whole altitude control loop is shown as in Figure 8 – the poles of the closed loop are shown in Table 2.
Poles of the altitude control closed loop

Root locus of the altitude control loop
Finally, the designed control laws must be put into a nonlinear model to test the control effects. If the results are not good enough, the control parameters must be tuned again in a small range, until the best effects are achieved. This work fine-tunes the pitch attitude control law and all the control laws of the level change mode are shown as (20).

Among this

4. Simulation and Analysis
Here we apply the designed control laws to the nonlinear model of the large aircraft to simulate and test. In simulation, from 35s to 45s, we input a gust disturbance, and decompose the speed of the gust into the X axis, Y axis and Z axis in the body coordinate. The speed component in each axis is respectively 5m/s, 3m/s and 2m/s. From 20s to 70s, with regard to altitude slope command the rate of climbing is 12m/s, this makes the flight level change from 9500m to 10100m. On other occasions, altitude holding command is connected into the altitude control loop. During the whole process, the airspeed holding command is connected to the throttle channel, and heading holding command is connected into the aileron channel. The simulation results are shown in Figure 9.

Nonlinear simulation results
In Figure 9, altitude keeps constant at 9500m during the first 20 seconds, changes to 10100m from 20s to 80s, and finally keeps constant at 10100m. During the whole process, overshoot of altitude response is zero, gust disturbance has little effect on the level change mode, and the control system shows good anti-wind disturbance performance. In the climbing process, airspeed keeps constant, pitch angle increases to 3.2°, and its overshoot is less than 20%. Both in the connecting process and the cutting process of the level change mode, the angle of attack shows about two degrees of fluctuation, but in the steady state process, the angle of attack keeps constant. Lateral control achieves the action of heading holding, when the gust disappears, and the heading is the same as that before the gust appears. Roll angle changes within 10°, sideslip angle changes within 1° and after the gust disappears, roll angle and sideslip angle soon restore to the initial trim state.
It is worth pointing out that when the flight level becomes much larger, because of the aerodynamic parameters, air density and temperature change, the control effect is obviously worse. Therefore, the control law needs to be designed again to adjust to the new flight environment, and smoothly switch to a control law for the new flight environment.
5. Conclusion
This study builds up a nonlinear model of large aircraft based on the data of the Boeing 707 in cruising phase, Through the trim and linearization, a linear model of large aircraft is further obtained, and then the root locus method is used to design the control laws of Level Change mode of large aircraft. Based on the simplified transfer function, the longitudinal and lateral control laws are designed, to achieve airspeed holding, heading holding and level change. The nonlinear model based simulation results show that the designed control laws can meet the requirements of performance index of large aircraft, and the whole control system has a better anti-gust performance.
Footnotes
6. Acknowledgments
This study was supported by the NUAA Fundamental Research Funds (no. NS2013029, NN2012101, NP4003-56×1100), Aeronautical Science Foundation of China (no.2010ZA52002), Specialized Research Fund for the Doctoral Program of Higher Education (no. 20123218120015), and the Open Fund of Postgraduate Innovation Base of NUAA (no. kfjj20110207).