
Abstract
The acceleration performance function and dynamic performance evaluation combining the acceleration, velocity, gravity and external force of a 2-DoF planar parallel mechanism are presented in this paper. By means of the principle of virtual work, the inverse dynamic model and acceleration performance function of the planar parallel mechanism are setup. Based on the factors in the acceleration performance function, the effect on the acceleration performance of parallel mechanisms is investigated. Then a new method considering the acceleration factor, velocity factor, gravity factor and external force factor for dynamic performance evaluation of the parallel mechanism is introduced, which can evaluate the dynamic performance of high-speed parallel mechanisms more exactly. Based on this method, the evaluation indices used in dynamic optimization are introduced. These indices overcome the limitation of commonly used indices, and lay the foundation for dynamic optimization of parallel mechanisms.
Keywords
1. Introduction
Compared to the rapid development of the kinematic performance evaluation method, the dynamic performance evaluation method has developed slowly. It is because of the complexity of the dynamic model that the mechanical design focuses on the optimization of the kinematics performance but ignores the dynamic performance. With the wide applications of the mechanism in recent years, the study on the dynamic performance of mechanism has increased. A number of studies have addressed the characterization of the dynamic performance, such as generalized inertia ellipsoid (GIE) [1], the acceleration parallelepiped (AP) [2], the acceleration sets (AS) [3], and the dynamic manipulability ellipsoid (DME) [4]. These existing dynamic performance evaluation methods can mainly be divided into two categories: the ellipsoid description methods and the non-ellipsoid description methods.
1.1 The ellipsoid description methods
The ellipsoid description methods describe the dynamic performance of the mechanism by drawing an n-dimensional performance ellipsoid. These methods have clear physical meaning with a visual image and are ideal for describing the dynamic performance of mechanisms.
In 1984, Asada [5–7] analysed the relationship between the kinetic energy and the generalized velocities of the mechanism and propounded the GIE method for the first time. Based on the GIE method, Khatib [8] propounded the belted inertia ellipsoid (BIE) method and gave the dynamic analysis of a redundant mechanism.
In 1985, Yoshikawa [4] analysed the relationship between the generalized accelerations and the generalized driving forces of the mechanism and propounded the DME method and the dynamic manipulability index (DMI), which is the most famous in the ellipsoid description methods. The DME method has simple principles and a clear physical meaning and directly reflects the acceleration capability of the moving terminal in any freedom. It is recognized by many scholars and widely used. However, the DME method ignores the influence of the speed, gravity and external force in analysing the relationship between the generalized accelerations and generalized driving forces and simply gives the approximate mapping between them.
Based on the DME method, some scholars propounded improved methods to expand the application of wide scope. Kosuge and Furta [9] propounded a new index which focused on the isotropic performance of the DME. Yoshikawa [10] divided the DME into translation dynamic manipulability and rotational dynamic manipulability, which are very effective in the analysis of the multiple degrees of freedom series mechanisms with spherical wrist. Chiacchio [11, 12] gave a new improved DME method by the introduction of a pseudo-inverse Jacobian matrix, which was decided by the inertia and driving force boundaries. Date [13] and Tsuda [14] analysed the dynamic performance of a snake-like robot with the DME method, to optimize the motion trajectory control. Rosenstein and Grupen [15] analysed the influence of the speed factor in the DME method. Yokohohji [16] analysed the dynamic performance of a multi-fingered grasping robot with an improved DME method. Wu [17] and Hao [18] analysed and optimized the dynamic performance of a 2-DoF parallel mechanism with the DME method.
Other scholars propounded new dynamic performance evaluation methods based on the DME method. Tadokoro [19] propounded the random dynamic manipulability (RDM) method by introducing random description. Bowling and Khatib [20, 21] analysed the features of the linear acceleration and angular acceleration of the moving terminal, then propounded the ellipsoid expansion model (EEM) method, which suits non-redundant mechanisms.
As well as the GIE and DME methods, some scholars have proposed other ellipsoid description methods. Stephen [22] gave a composite index based on the kinematics manipulability ellipsoid (KME) method and the force ellipsoid (FE) method. Koeppe and Yoshikawa [23] proposed the manipulating force ellipsoid (MFE) to analyse the dynamic performance of the force and torque of the mechanism. Bicchi and Prattichizzo [24] propounded a new force ellipsoid method by analysing the force characteristics of the active joint and passive joint. Kurazume and Hasegawa [25] propounded the inertia matching ellipsoid (IME) method by introducing the load into the inertia matrix of the mechanism.
1.2 The non-ellipsoid description methods
The non-ellipsoid description methods describe the dynamic performance of the mechanism all other ways, except by drawing n-dimensional performance evaluation ellipsoids, such as drawing a polyhedron or irregular surface.
Timothy and Bruce [26] propounded a global evaluation index, named acceleration radius (AR) based on the DMI. Shiller and Sundar [27] propounded the acceleration line (AL) and optimized the dynamic performance of a two links mechanism. Kim and Desa [28] propounded the acceleration sets (AS) method, which used the parallel polyhedron to show the dynamic performance of mechanisms. Bowling and Khatib [29] used the dynamic capability equations (DCE) method, which was based on the EEM method, to analyse the dynamic performance of a robotic mechanism. Then Blowling and Kim [30] propounded the dynamic capability hypersurface (DCH) method to analyse the dynamic performance of non-redundant series mechanisms fixed to a basis surface. Zhao and Gao [31, 32] analysed the dynamic performance evaluation of the redundant parallel mechanism by optimizing the actuating torques, combining the acceleration, velocity and gravity terms of the dynamic equations. Using a similar method, Zhao [33] analysed the dynamic performance evaluation of the three translational degrees of freedom of a parallel robot, while considering the probable maximum torque and the probable maximum power of the actuating joint.
1.3 Purpose of this study
Though there are a lot of methods used to evaluate the dynamic performance of mechanisms, the following research needs to be done.
The existing dynamic performance evaluation methods, both ellipsoid description methods and non-ellipsoid description methods, use image depiction to analyse the dynamic performance. These methods can directly reflect the distribution of the dynamics performance, but most of them do not give a global quantitative index, which is important in dynamic optimization and structural design.
In order to simplify the solution process, only the inertia matrix of mechanisms is considered in the DME method, omitting the factors of speed, gravity and external forces. Whether or not the DME method suits high-speed parallel mechanisms needs further validation. Although some scholars have analysed the effect of the gravity factor and speed factor in their study [31–33], a method considering the effects of all those factors is not given.
In this study, the dynamic performance evaluation of a 2-PRR 2-DoF planar parallel mechanism is analysed to accomplish the above research.
2. Kinematic analysis and dynamic analysis of the parallel mechanism
2.1 Kinematic analysis
As shown in Fig. 1, the 2-DoF parallel mechanism consists of a base platform, two legs and a moving platform. The legs are connected to the base platform by means of vertical prismatic joints. These prismatic joints are active joints. By actuating the active prismatic joints, the moving platform can move with 2-DoF translational in a plane. A base coordinate frame which is denoted as O-XY frame is fixed at the centre of the base platform. Similarly, a moving coordinate frame N-xy is located at the centre of the moving platform.

The kinematic model of the 2-DoF parallel mechanism
qi (i=1, 2) is the distance between the current location from the initial position of the slider, so the movement input vector can be written as:

The position vector of the moving platform can be written as:

Then the position vector of the point Ai can be written as:

According to the geometrical relationship of the 2-DoF parallel mechanism, there are:


Then from Eq. (4) and Eq. (5), the inverse kinematics equations of the mechanism can be written as:


According to the installation of the parallel mechanism, the ‘+′ symbol is selected in Eq. (6) and Eq. (7).
Taking the derivative of Eq. (4) and (5), with respect to time, there are:


From Eq. (8) and (9), there is:

where
The expression of the relationship between the moving terminal velocity vector and active joint velocity vector can be written as:

So the Jacobian matrix of 2-DoF parallel mechanism can be written as:

The velocity vectors of some key points of the 2-PRR parallel mechanism can be written as:


2.2 Dynamic analysis
After kinematic analysis, the dynamic modelling of the 2-DoF parallel mechanism is given, based on the Virtual Work Principle method.
Then taking the derivative of Eq. (8) and Eq. (9) with respect to time, there are:


The acceleration vectors of some key points of the 2-PRR parallel mechanism can be written as:



According to the Virtual Work Principle method, the derivation of the partial angular velocity matrix
By selecting point Ai as the key point of the slider, the partial angular velocity matrix and the partial velocity matrix of the slider can be written as:


Similarly, by selecting point Ai as the key point of the leg, the partial angular velocity matrix and the partial velocity matrix of the leg can be written as:


Then by selecting point Gi as the key point of weight, the partial angular velocity matrix and the partial velocity matrix of the leg can be written as:


By selecting point N as the key point of the moving platform, the partial angular velocity matrix and the partial velocity matrix of the moving platform can be written as:


According to the Virtual Work Principle method, in the second step the calculation of the inertia force vector
In the following equations, mS
i
, mL
i
, mW
i
and mM represent the quality of the sliders, the quality of the legs, the quality of the weights and the quality of the moving platform. The gravity vector is expressed as
From the Newton equation of the single slider, the inertia force vector of the slider at the key point Ai can be gained. The equation of

Where:



Then the inertia torque of the slider at the key point A
i
can be written as:

So the four parts, determined by different factors of Mi1, are all zeros.
Similarly, the inertia force vector of the leg at the key point Ai can be written as:
where lc is the distance between the centroid and the key point of leg.
In Eq. (35), there are:



Then the inertia torque vector of the leg at the key point Ai can be written as:

where Ii2 is the moment of inertia of the leg about the key points Ai.


The inertia force vector of weight at the key point Gi can be written as:


where:




The inertia force vector and torque of moving platform at the key point N can be written as:


where:




According to the virtual work principle, the sum of the virtual work done by all forces and torques should be zero. Therefore:

where τ = [τ1 τ2]T, τ1 and τ2 are the driving forces of the sliders.
So the inverse dynamic equation of the 2-DoF parallel mechanism can be written as:

Taking into account the effect of the different factors of the mechanism, the inverse dynamic equation of the 2-PRR parallel mechanism can be written as:

In Eq. (59), the decomposed driving force vectors
3. Dynamic performance influencing factors
3.1 Acceleration performance function
Eq. (59) can also be written as:

where
From Eq. (60), the acceleration vector of the parallel mechanism can be written as:

Eq. (61) can be simplified as:

where
Then Eq. (62) is defined as the acceleration performance function (APF).
3.2 The DME method
If the speed, gravity and external force influencing factors in the APF of the parallel mechanism are ignored, the approximate mapping between the generalized acceleration vector and the driving force vector can be written as:

On the assumption that the driving force vector is not more than one unit in any direction, there is:

Taking into account the symmetry of the matrix

From Eq. (65), the acceleration vector in any direction can be determined, based on the unit driving force vectors.
All the acceleration vectors constitute an n-dimensional ellipsoid in the reference frame of acceleration. That n-dimensional ellipsoid is the DME defined by Yoshikawa in 1985 [4].
3.3 The effect of the speed influencing factor
From Eq. (62), it can be found that the shape of the n-dimensional ellipsoid is only decided by the inertia matrix
In this section, the effect of the speed influencing factor is analysed first. From the equation of

The distribution of the acceleration ellipsoid with low-speed movement

The distribution of the acceleration ellipsoid with high-speed movement
In Fig. (2) and (3), the curve of the DME can also be seen as the acceleration ellipsoid considering speed factors, when the horizontal velocity of platform is zero.
With the horizontal velocity of the moving platform increases gradually, the effect of the speed factor on the dynamic performance of the parallel mechanism increases at the same time. When the velocity of the moving platform reaches a certain value, the effect can't be ignored and the result from the DME method is not accurate.
Then let the moving platform move through different positions with the same velocity (10m/min for example), as shown in Fig. 4. The acceleration ellipsoids considering speed influencing factors at these positions are shown in Fig. 5.

The different positions chosen in the workspace

The distribution of the acceleration ellipsoid in different position with 10m/min horizontal movement (AE is short for acceleration ellipsoid)
From Fig. 5, it can be seen that the effect of the velocity factor on the acceleration performance is different when the position of the moving platform is different. When the position of the moving platform is closer to the singular posture, the effect of the speed factor on the acceleration performance becomes significant.
In summary, the effect of the speed factor on the ability of acceleration is very significant when the parallel mechanism's velocity is large enough. The DME method, which only considers the inertia factor is no longer applicable to the dynamic performance analysis of highspeed parallel mechanisms.
3.4 The effect of the gravity influencing factor
Secondly, the effect of the gravity influencing factor on the acceleration performance of the parallel mechanism is analysed.
As shown in Fig. 4, five different positions in the workspace of the 2-PRR parallel mechanism are selected as observation points. Then the distribution of the acceleration ellipsoid, considering the gravity factor and the DME, can be drawn in the same reference frame, as shown in Fig. 6.

The distribution of the acceleration ellipsoid considering gravity in different position
As shown in Fig. 6, the acceleration ellipsoids considering the gravity factor are obviously different from the DME. When the position of the moving platform is closer to the singular posture, the effect of the gravity factor on the acceleration performance becomes significant.
Therefore, the effect of the gravity factor on the acceleration ability can't be ignored arbitrarily in the dynamic performance analysis of the parallel mechanism.
3.5 The effect of the external force influencing factor
Thirdly, the effect of the external force influencing factor on the acceleration performance of the 2-PRR parallel mechanism is analysed.
The reaction force from the work piece to the milling tool is the main external force of the large milling equipment. The analysis of the milling force is no longer studied here. The empirical formulas from previous studies will be used in this paper.



FH is the force along the feeding direction, FV is the force along the tangential direction of the cutting surface and Fa is the force along the central axis of the milling head, as shown in Fig. 7.

The force analysis of the Milling tool
Similarly, five different positions in the workspace of the 2-PRR parallel mechanism are selected as observation points. Then the distribution of the acceleration ellipsoid considering the external force factor and the DME can be drawn, as shown in Fig. 8.
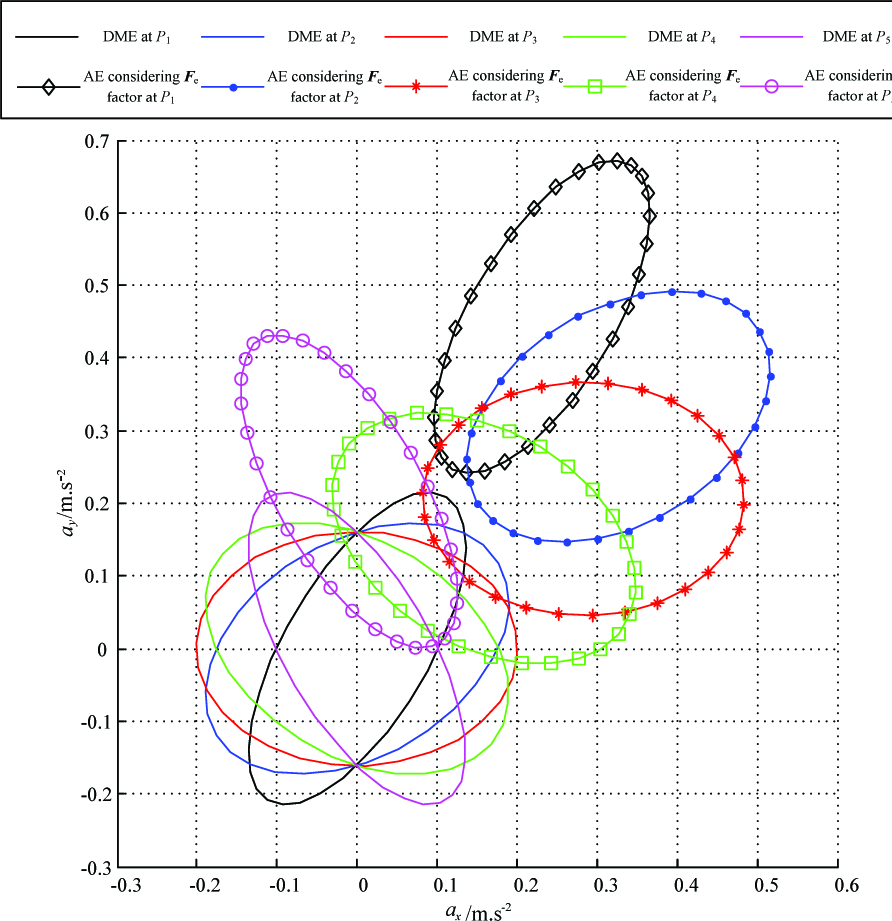
The distribution of the acceleration ellipsoid considering external force in different position (Fe is short for external force)
As shown in Fig. 8, the acceleration ellipsoids considering the external force factor are also different from the DME. The error between these two kinds of ellipsoids is the result from the position of the moving platform and the external force vector. Similarly, when the position of the moving platform is closer to the singular posture, the effect of the external force becomes significant too.
4. Comprehensive acceleration ellipsoid
4.1 The limitations of existing dynamic performance evaluation
In the dynamic performance analysis of the serial mechanism, the GIE method, the DME method, the IME method and the AL method are often used, but there are some limitations to these methods as performance evaluation indices in the dynamic performance optimization of parallel mechanism.
On one hand, the dynamic performance evaluation methods based on ellipsoid description, such as GIE, DME, MFE, IME and so on, give less of a global quantify index of the mechanism's dynamics performance. So the above methods are not suitable for the optimization and design of the parallel mechanism. Some methods based on other kinds of figure description, such as the AL method and the DCE method, do not give a global quantify index which can be used in optimization of parallel mechanism too.
On the other hand, the DME method, which is used most widely, ignores the effect of the speed influencing factor, the gravity influencing factors and the external force influencing factor. From the dynamic analysis and simulation above, it can be seen that all the four influencing factors can't be ignored arbitrarily in the dynamic performance analysis of the parallel mechanism. The DME method and other methods based on it are not suitable for the parallel mechanisms used in high-speed machine tools.
Therefore, it is necessary to find a suitable method which can consider the inertia factor, speed factor, gravity factor and external force factor in the dynamic performance evaluation of the parallel mechanism. The new method can also give a global quantify index, which can be used in the mechanism optimization.
4.2 The comprehensive acceleration ellipsoid method
From Eq. (62), there is

Taking into account the limit of the driving force provided by the servo motor, there is

The driving forces of different servo motors may be different due to the model and power of the motor. In order to facilitate the analysis, it is necessary to normalize the different driving forces. So

where L = diag(τ1max,τ2max,…,τn
max
,), is the named driving force normalization coefficient matrix and

Similarly, on the assumption that the normalized driving force vector is not more than unit in any direction, there is

So there is

From Eq. (74), the maximal acceleration in any direction of the moving platform, considering speed, gravity and external force factor, can be determined. All the acceleration vectors constitute an n-dimensional ellipsoid in the reference frame of acceleration in the same manner. This ellipsoid is named as the comprehensive acceleration ellipsoid (CAE). The way to analyse the dynamic performance evaluation is called the CAE method.
The CAE method is proposed based on the APF of the parallel mechanism. Although the CAE is similar to the DME, these two methods are different in essence.
Firstly, the DME method only considers the generalized inertia matrix of the mechanism, whilst ignoring other factors. The CAE method is based upon the APF, considering the inertia, speed, gravity and external force factors at the same time. Therefore, the CAE method values the dynamic performance of the parallel mechanism more accurately.
Secondly, the DME method gives the acceleration distribution when the driving force in any direction is one unit and just describes the performance distribution. The CAE method gives the practical maximum acceleration in any direction with the servo motors' maximum power and can help us discover the practical acceleration distribution of the mechanism.
4.3 The dynamic performance indices based on the CAE method
For the ellipsoid performance evaluation method, four indices are often used to evaluate the performance, such as the volume of the ellipsoid, the maximal radius, the minimum radius and the ratio between the minimum radius and the maximal radius.
In those four indices, the minimum radius reflects the worst performance of the ellipsoid. The centre of the ellipsoid in the CAE method is not located in the origin of the acceleration reference frame. The point that is farthest from the origin point on the ellipsoid surface reflects the worst dynamic performance of the parallel mechanisms. Here the worst performance point is still called the minimum radius expediently. The minimum acceleration value, which is very important, reflects the short board of the dynamic performance, so a new dynamic index is proposed based on the minimum radius, called the dexterous acceleration index (DAI). It can be written as

In order to compare the dynamic performance of different parallel mechanisms in the whole workspace, a global dynamic evaluation index is proposed based on the DAI, called the global dexterous acceleration (GDA). It is defined as follows

Thus, the units of the DAI and GDA are m/s2. The distribution of the DAI of the 2-PRR parallel mechanism is mapped with a computer simulation, as shown in Fig. 9.
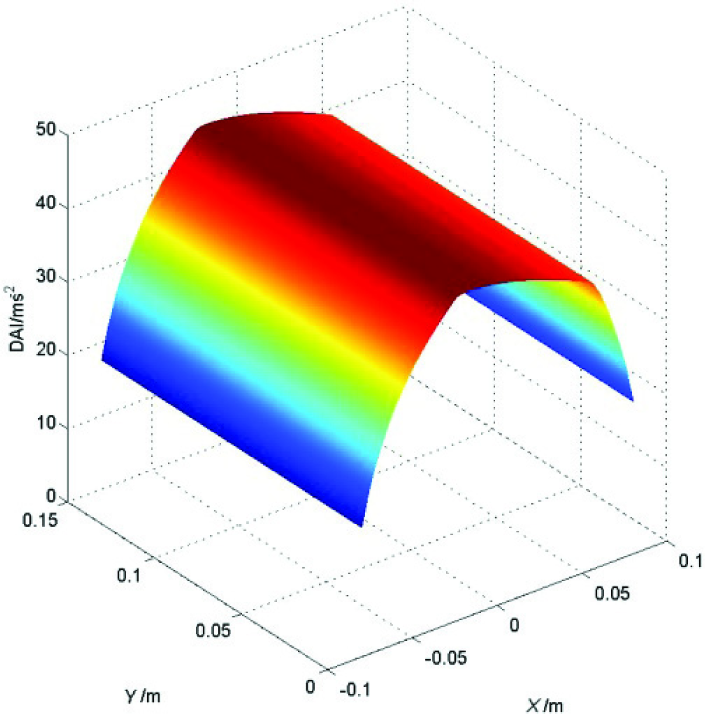
The distribution of the DAI
The ratio between the minimum radius and the maximal radius is used to measure the isotropy of the performance of the ellipsoid, such as the local condition index (LCI) in kinematics analysis. The isotropy of the dynamic performance is also very important in the dynamic analysis of parallel mechanisms. In the CAE method, the ratio is redefined as the radio between the minimum acceleration and the maximal acceleration and is called the comprehensive acceleration dexterity index (CAD). It is defined as follows

Similarly, in order compare the isotropy of the dynamic performance of different parallel mechanisms in the whole workspace, a global evaluation index is proposed based on the CAD, called the global comprehensive acceleration dexterity (GCDA). It is defined as follows

The distribution of the CAD of the 2-PRR parallel mechanism is mapped with a computer simulation, as shown in Fig. 10.

The distribution of the CAD
The DAI reflecting the acceleration ability of the parallel mechanisms and the CAD reflecting the isotropy of the dynamic performance of the parallel mechanisms are proposed based on the CAE method. These two indices reflect the dynamic performance more accurately and the global indices based on them can be used in the dynamic optimization of the parallel mechanism.
5. Conclusions
In this paper, the effect of the inertia, speed, gravity and external force factors of the acceleration performance function is analysed. On the basis of analysis, a new dynamic performance evaluation method is proposed and new indices are given at the same time.
In the DME method, the speed, gravity and external force factors in the AFE are ignored. The evaluation results of the dynamic performance based on this method are not accurate enough.
From the analysis of the effect of the speed, gravity and external force factors, it is proved that these three influential factors can't be ignored in the dynamic performance analysis of the parallel mechanism, especially the high-speed parallel mechanisms used in the large equipment.
The CAE method considering all the four factors can analyse the dynamic performance evaluation of the parallel mechanism more accurately. The indices based on the CAE method, such as DAI and CAD, give a more comprehensive description of the dynamic performance of the parallel mechanism. The Global evaluation indices GDA and GCAD can be used to optimize the dynamic performance in the design of parallel mechanism.
Footnotes
6. Acknowledgments
This project is supported by National S&T Major Project of China (grant no. 2012ZX04008041).