This article deals with the global asymptotic stability problem for a class of neural networks with time-varying discrete and distributed delays. The activation functions are assumed to be neither monotonic nor differentiable, and two types of time-varying discrete delays are considered: one is differentiable and has bounded derivatives, and the other is continuous and may vary very fast. By constructing an appropriate Lyapunov-Krasovskii functional and employing a tighter inequality, new stability criteria dependent on both the lower bound and upper bound of the time-varying time delays are established to guarantee asymptotic stability for the addressed neural networks. It is shown that the new criteria improve some results from previous studies. Two simulation examples are given to show the effectiveness and the reduced conservatism of the proposed criteria.
Neural networks (NNs) have received considerable attention due to their extensive applications in various signal-processing problems such as optimization, fixed-point computations, and other areas in recent decades. Since integration and communication delays are unavoidably encountered both in biological and artificial neural systems, and may result in oscillation and instability, increasing interest has been focused on stability analysis of NNs with time delays [1–7, 9–20, 34–42].
As is well known, the use of constant fixed delays in models of delayed feedback may provide a good approximation in simple circuits consisting of a small number of cells. However, neural networks usually have a spatial limit due to the presence of a multitude of parallel pathways with a variety of axon sizes and lengths. Thus, there is a distribution of conduction velocities along these pathways, as well as a distribution of propagation delays. In these circumstances the signal propagation is not instantaneous and cannot be modelled with discrete delays. A more appropriate approach is to incorporate continuously distributed delays in neural network models. In recent years there has been a growing interest in neural networks with discrete and distributed delays (see for example [21–24, 27]). In [21, 22], several sufficient conditions to ensure the existence and global asymptotic stability of an equilibrium point for the neural networks with discrete and distributed constant delays are obtained. In [23], the global exponential stability problem is investigated for the neural networks with discrete and distributed constant delays, and two sufficient conditions are given. In [24, 27], robust stability is discussed for neural networks with discrete and distributed constant delays, and several sufficient conditions are derived to guarantee global robust stability for the neural networks. However, it should be noted that most results in [21–24, 27] are only concerned with constant time delays. Very recently, in [25, 28], the global asymptotic stability problem is investigated for neural networks with discrete and distributed time-varying delays, where time-varying delays are continuously differentiable and the derivatives of time delays are bounded. In [26], the authors consider cellular neural networks with discrete and distributed time-varying delays, where the time-varying delays are continuous and may vary very fast. It is worth pointing out that, in [25, 26, 28], the low-bound time-varying delays are assumed to 0. In fact, they are not equal to 0. To our knowledge, only one study [14] has touched on delay NNs with nonzero low-bound time-varying delays.
Motivated by the above discussions, this article considers two types of time-varying delays: one is differentiable and has a bounded derivative; the other is continuous and may vary very fast. By constructing an appropriate Lyapunov-Krasovskii functional and employing a new inequality, new stability criteria are established, without ignoring certain terms, to guarantee asymptotic stability for the addressed neural network. Two simulation examples are given to show the effectiveness and lower conservatism of the proposed criteria.
Notation. Throughout this paper, in the real symmetric matrix P > 0(≥ 0) P is a positive definite (positive semi-definite) matrix, and A > (≥)B means A – B > (≥)0. I is used to denote an identity matrix with a proper dimension. Matrices, if not explicitly stated, are assumed to have compatible dimensions. The symmetrical terms in a symmetrical matrix are denoted by * [43, 44, 45].
2. Problem formulation and preliminaries
Consider the following delayed neural networks with n neurons [43, 44, 45]:
where y(·) = [y1 (·),y2 (·),⋯, yn, (·)]τ ε Rn is the neuron state vector,
denotes the bounded neuron activation function with gi(0) = 0, J = [J1,J2,⋯,Jn]τ ε Rn is a constant input vector, A = diag {a1, a2,⋯,an} is a positive diagonal matrix, and are the interconnection matrices representing the weight coefficients of the neurons. d(t) and τ(t) are discrete time delay and distributed time delay, respectively. τ(t) is assumed to satisfy 0 < τ(t) ≤ τ, where τ is a constant.
In the following, each neuron activation function in (1), gi(·),i = 1,2,…,n, satisfies the following condition (see [29, 30] for details):
where l−i and l+i are constants and li (i = 1,2,…,n).
As the activation functions are bounded, according to [23], there exists at least one equilibrium point for the NNs (1). Assume is an equilibrium of system (1); one can then derive from (1) that the transformation z(·) = y(·) – y* transforms system (1) into the following system:
where z(t) = [z1 (·),z2 (·),⋯,zn (t)]τ is the state vector of the transformed system, and . Note that the functions fi (·),i = 1,2,…,n satisfy the following condition:
Lemma 1. (Ku [8]) For any positive symmetrical constant matrix M ε Rn×n, with a scalar γ > 0, w: [0,r] → Rn such that the integrations concerned are well defined:
Lemma 2. (Li [33]) For any scalars where W1 > 0, W2 > 0 if 0 < dm ≤d(t) ≤ dM; the following inequality is then true:
From the above analysis, we can see that the stability problem of system (1) on equilibrium y* is changed into the zero stability problem of system (3). We will now consider two cases of time-varying discrete delays [43, 44, 45]:
Case 1.d(t) is a differential function, for all t ≥ 0 and for given scalars 0 ≤ μ < 1 and 0 ≤ h1 < h2 satisfying the condition that h1 ≤ d(t) ≤ h2, ḋ(t) ≤ μ
Case 2.d (t) is a continuous function, for all t ≥ 0 and given scalars 0 ≤ h1 < h2 satisfying the condition that h1 ≤ d(t) ≤ h2. In this case, very fast continuous changes in the time delay are allowed.
3. Main results
In this section, we shall establish our main criterion based on an appropriate Lyapunov-Krasovskii functional and a tighter inequality. First, we consider the case that the time-varying discrete delays satisfy Case 1.
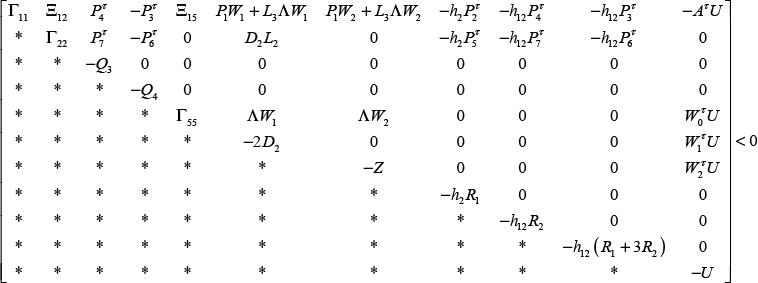
Theorem 1. For given scalars 0 ≤ μ for delay d(t) satisfying h1 ≤ d(t) ≤ h2, ḋ(t) ≤ μ and τ(t) satisfying 0 < τ(t) ≤ τ, the origin of system (3) is asymptotically stable if there exist matrices P1 > 0, Qi > 0 (i = 1,2,3,4), R1 > 0, R2 > 0, Z > 0, diagonal matrices Λ = diag{λ1,λ2,…,λn} > 0, D1 = diag{d11,d12,…d1n} > 0, D2 = diag{d21,d22,…,d2n} > 0 and any matrices Pi(i = 2,…,7) such that the following LMIs hold:
where
and* denotes the symmetrical terms in a symmetrical matrix.
Proof. Consider the following Lyapunov-Krasovskii functional candidate for NNs (3):
Where
with
and
Note that (t)EPξ0(t) is actually zτ (t)P1z (t). On the other hand, from the Leibniz-Newton formula, the following equations are true:
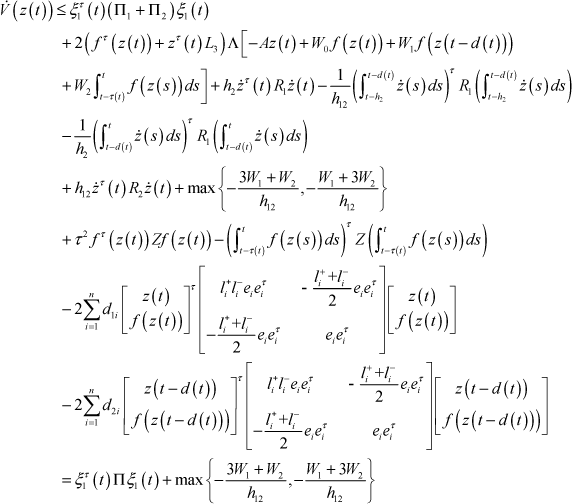
The time derivative of V1 (z(t)) along the trajectories of delay NNs (3) with (13)–(15), is obtained as:
where
and
where Λ = diag {λ1, λ2,…, λn}, L3 = diag Similarly, computing the time derivatives V3 (z(t)) and V4 (z(t)) with Jensen integral inequality [8], we have:
It is clear that inequality (26) is equivalent to (5a), and inequality (27) is equivalent to (5b), so V̇(z(t)) < 0 holds when (5a) and (5b) hold. Then, the delay NNs (5) are guaranteed to be asymptotically stable.
Theorem 1 is dependent on both the lower-bound h1 and upper-bound h2 of the time-varying time delays, where h1 is not 0. When h1 =0, the following delay-dependent stability criterion can be obtained by setting R2 = 0,Q3 =0,P4 = P7 =0.
Corollary 1. For given scalars and . Then, for delay d(t) satisfying h1 ≤ d(t) ≤ h2,ḋ(t) ≤ μ and τ(t) satisfying 0 <0 < τ(t) ≤ τ, the origin of system (3) is asymptotically stable if there exist P1 > 0, Qi > 0(i = 1,2,4), R1 > 0, Z > 0, diagonal matrices and any matrices Pi (i = 2,3,, 5,6) such that the following LMIs hold:
Where
Ξ15,Ξ55,Ξ66 are defined in (8), (10), and (11) and * denotes the symmetrical terms in a symmetrical matrix.
Remark 2. In [21], only constant-distributed time delay is studied. However, in this paper, we considered the stability problem of a class of NNs with time-varying delay. Meanwhile, compared with the result in [28], , (i = 1,2,…n) in Theorem 1 and Corollary 1 are allowed to be positive, negative or zero, which are less restrictive bounds than those given in [28].
Now we examine Case 2. Similar to the proof of Theorem 1, we can obtain the following delay-dependent stability criterion.
Theorem 2. For a given scalar,
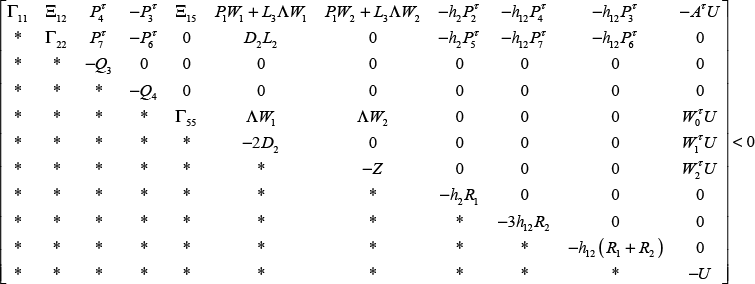
Then, for delay ḋ (t) satisfying h1 ≤ d (t) ≤ h2 and τ (t) satisfying 0 < τ(t)≤ τ, the origin of system (3) is asymptotically stable if there exist matrices P1 > 0,Qi(i = 3,4) > 0,R1 > 0,R2 > 0,Z > 0, diagonal matrices , , and any matrices Pi(i = 2,…,7) such that the following LMIs hold:
where
Ξ12, Ξ15, U are defined in (7), (8) and (12) and * denotes the symmetrical terms in a symmetrical matrix.
In order to demonstrate the improvement over the existing criteria, Corollary 2 is established from Theorem 2 by setting h1 = 0, R2 = 0, Q3 = 0, P4 = P7 = 0.
Corollary 2. For given scalars, and . Then, for any delay where d (t) and τ(t) satisfy 0 ≤ d(t)≤ h2 and 0 ≤ τ(t)≤ τ, the origin of system (3) is asymptotically stable if there exist matrices P1 > 0,Q4 > 0,R1 > 0,Z > 0, diagonal matrices and any matrices Pi (i = 2,3,5,6) such that the following LMIs hold:
where
Ξ15,Γ55 are defined in (8) and (32) and * denotes the symmetrical terms in a symmetrical matrix.
Remark 3. For very recently, Song and Wang [26] provided a new stability condition for NNs by introducing a new type of Lyapunov functional. Compared with the Theorem 1 in [26], the advantage is that the LMI in (37) involves significantly fewer variables. Specifically, when z (t) ε Rn, the number of variables to be determined in (37) as 6n2 + 5n, while in [26] the number of variables is 7n2 + 8n. That is, the variables in [26] are around 1.2 times those in Theorem 1. However, our result may provide less conservative results than Theorem 1 in [26], as shown in of the examples in section 4.
4. Numerical examples
In this section, we use two examples to show the benefits of our results for two types of time-varying delay.
Example 1. Consider the delayed NNs with d(t) satisfying Case 1 in [28,43,44,45].
For , it can be confirmed that Theorem 1 in [4] and Theorem 1 in [12] are not satisfied; i.e., they fail to conclude whether this system is asymptotically stable or not. However, when μ = 0, by applying the results in [12,28] to this example, the maximum allowable bounds h are 1.422 [12] and 1.932 [28], respectively, while by using Theorem 1 we have h = 3.584. When μ = 0.5 and μ = 0.9, the corresponding upper bounds are listed in Table 1. For the case of and , the method in [15,17] fails. In this paper, the maximum delay h, which guarantees the delayed neural networks are asymptotically stable, is calculated to be 1.973.
Comparisons of maximum allowed delay h2 for Example 1 with h1=0
Example 2. Consider the delayed NNs with d(t) satisfying Case 2.
It is easy to see that the activation functions satisfy (4) with
This example, with τ = 3.597 and , makes it obvious that 2 ≤ d(t) ≤ 6. In this case, it is found that the delay-dependent stability conditions proposed in [22,25,26] are not satisfied. However, by Theorem 2 in this paper, the neural network under consideration is globally stable. This implies that, for this example, the delay-dependent stability result proposed in Theorem 2 is less conservative than that in [22, 25, 26].
5. Conclusion
This article, by employing the newly proposed Lyapunov functional and a tighter inequality, has established new stability criteria in terms of LMIs, which are dependent on both the lower bound and upper bound of the time-varying time delays. It can be shown that the obtained criteria are less conservative than previously existing results through the numerical examples.
Footnotes
6. Acknowledgements
This paper was supported by the National Nature Science Foundation of China under grant 61105075, 61104206, the Natural Science Funds of Jiangsu Province (BK20131000), a major project to cultivate science and technology innovation from the Ministry of Education of China (708045), the Project of the National Department, Public Benefit Research Foundation (GYHY200806017), the Industry-Academic Joint Technological Innovations Fund Project of Jiangsu Province (2012t026), the Nanjing University of Information Science & Technology University Student Renovation Project (N1885012179), the Research Foundation (20070063), the College Students' Practice and Innovation Training Project (11CX017, 12CX016, 12CX050, 201310300039Z), and the Teaching Reform Project (13JY022).
References
1.
MarcoM.D.FortiM.GrazziniM.PancioniL., On global exponential stability of standard and full-range CNNs, International Journal of Circuit Theory and Applications, 36, (2008) 653–680.
2.
CaoJ.D.WangJ., Global exponential stability and periodicity of recurrent neural networks with time delays, IEEE Trans. Circuits Syst. I, Reg. Papers52 (2005) 920–931.
3.
GauR.S.HsiehJ.G.LienC.H., Global exponential stability for uncertain bidirectional associative memory neural networks with multiple time-varying delays via LMI approach, International Journal of Circuit Theory and Applications, 36, (2008) 451–471.
4.
ArikS., Global asymptotic stability of a larger class of neural networks with constant time delay, Phys. Lett. A, 311 (2002) 504–511.
5.
ChenT.RongL., Delay-independent stability analysis of Cohen-Grossberg neural networks, Phys. Lett. A, 317 (2002) 436–449.
6.
ZhangQ.WeiX.XuJ., Global exponential stability for nonautonomous cellular neural networks with delays, Phys. Lett. A, 351 (2006) 153–160.
7.
ZhangQ.WeiX.XuJ., Stability analysis for cellular neural networks with variable delays, Chaos, Solitons Fractals, 28 (2006) 331–336.
8.
GuK., An integral inequality in the stability problem of time-delay systems. In: Proceedings of 39th IEEE Conference on Decision and Control, (2000) 2805–2810.
9.
SinghV., Global robust stability of delayed neural networks: An LMI approach, IEEE Trans. Circuits Syst. II, Exp. Briefs, 52 (2005) 33–36.
10.
WangZ.LiuY.LiuX., On global asymptotic stability of neural networks with discrete and distributed delays, Phys. Lett. A, 345 (2005) 299–308.
11.
WangZ.LiuY.LiM.LiuX., Stability analysis for stochastic Cohen-Grossberg neural networks with mixed time delays, IEEE Trans. Neural Netw., 17 (2006) 814–820.
12.
XuS.LamJ.HoD.W.C.ZouY., Novel global asymptotic stability criteria for delayed cellular neural networks, IEEE Trans. Circuits Syst. II, Exp. Briefs, 52 (2005) 349–353.
13.
XuS.LamJ., A new LMI condition for delay-dependent asymptotic stability of delayed Hopfield neural networks, IEEE Trans. Circuits Syst. II, Exp. Briefs, 53 (2006) 230–234.
14.
HeY.LiuG. P.ReesD.MinWu, Stability analysis for neural networks with time-varying interval delay, EEE Trans. Neural Netw., 18 (2007) 1850–1854.
15.
HeY.LiuG.P.ReesD., New delay-dependent stability criteria for neural networks with time-varying delay, IEEE Trans. Neural Netw., 18 (2007) 310–314.
16.
ParkJ.H., Robust stability of bidirectional associative memory neural networks with time delays, Phys. Lett. A, 359 (2006) 494–499.
17.
HeY.WangQ.G.WuM., LMI-based stability criteria for neural networks with multiple time-varying delays, Physica D, 212 (2005) 126–136.
18.
LiT.GuoL.LinC.SunC.Y., New results on global asymptotic stability analysis for neural networks with time-varying delay, Nonlinear Analysis: Real World Applications, 10 (2009) 554–562.
19.
JiangH.TengZ., Boundedness and global stability for nonautonomous recurrent neural networks with distributed delays, Chaos, Solitons and Fractals, 30 (2006) 83–93.
20.
RuanS.FilfilR.Dynamics of a two-neuron system with discrete and distributed delays, Physica D, 191 (2004) 323–342.
21.
WangZ.LiuY.LiuX., On global asymptotic stability of neural networks with discrete and distributed delays, Phys. Lett. A, 345 (2005) 299–308.
22.
ParkJ.H., On global stability criterion for neural networks with discrete and distributed delays, Chaos, Solitons and Fractals, 30 (2006) 897–902.
23.
LiuY.WangZ.SerranoA.LiuX., Discrete-time recurrent neural networks with time-varying delays: Exponential stability analysis, Physics Letters A, 362 (2007) 480–488.
24.
WangZ.ShuH.LiuY.HoDWC.LiuX., Robust stability analysis of generalized neural networks with discrete and distributed time delays, Chaos, Solitons and Fractals, 30 (2006) 886–96.
25.
LienC.ChungL., Global asymptotic stability for cellular neural networks with discrete and distributed time-varying delays, Chaos, Solitons and Fractals, in press. doi:10.1016/j.chaos.2006.03.121.
26.
SongQ.K.WangZ., Neural networks with discrete and distributed time-varying delays: A general stability analysis, Chaos, Solitons and Fractals, in press. doi:10.1016/j.chaos.2006.10.044.
27.
ParkJ.H., An analysis of global robust stability of uncertain cellular neural networks with discrete and distributed delays, Chaos, Solitons and Fractals, 32 (2007) 800–807.
28.
ParkJ.H.ChoH.J., A delay-dependent asymptotic stability criterion of cellular neural networks with time-varying discrete and distributed delays, Chaos, Solitons and Fractals, 33 (2007) 436–442.
29.
LiT.GuoL.LinC., Stability criteria with less LMI variables for neural networks with time-varying delay, IEEE Trans. Circuits Syst. II, Exp. Briefs, 55 (2008) 1188–1192.
30.
SongQ.K.WangZ., A delay-dependent LMI approach to dynamics analysis of discrete-time recurrent neural networks with ti–varying delays, Phys. Lett. A, in press. doi: 10.1016/j.physleta.2007.03.088.
31.
SinghV., Global robust stability of interval delayed neural networks: Modified approach, International Journal of Circuit Theory and Applications, in press.
32.
LiL.GuoL.SunC.Y, Further result on asymptotic stability criterion of neural networks with time-varying delays, Neurocomputing71 (2007) 439–447.
33.
LiL.YaoX.M.WuL.Y.LiJ.Q., Improved delay-dependent stability results of recurrent neural networks, Applied Mathematics and Computation, in press. doi:10.1016/j.amc.2012.03.013.
34.
BaruchI.S.SaldiernaE.E.CastilloO., Distributed parameter bioprocess plant identification and I-term control using centralized recurrent neural network models, IJCNN (2011) 267–274.
35.
BaruchI.S.Mariaca-GasparC.-R.de la CruzI.PCastilloO., Direct torque adaptive vector neural control of a three-phase induction motor, IJCNN (2010) 1–8.
36.
BaruchI.S.Galvan-GuerraR.Mariaca-GasparC.-R.CastilloO., Fuzzy-Neural control of a distributed parameter bioprocess plant, FUZZ-IEEE (2008) 2208–2215.
37.
XiaM.FangJ.LangY.WangZ., Dynamic depression control of chaotic neural networks for associative memory, Neurocomputing73 (2010) 776–783.
38.
XiaM.ZhangY.WengL.YeX., Fashion retailing forecasting based on extreme learning machine with adaptive metrics of inputs, Knowledge-Based Systems, 10.1016/j.knosys.2012.07.002.
39.
BaruchI.S.Mariaca-GasparC.-R.Barrera-CortsJ.CastilloO., Direct and indirect neural identification and control of a continuous bioprocess via Marquardt learning, Soft Computing for Intelligent Control and Mobile Robotics (2011) 81–102.
40.
XiaM.WangZ.FangJ., Temporal association based on dynamic depression synapses and chaotic neurons, Neurocomputing, 74 (2011) 3242–3247.
41.
BaruchI.S.de la CruzI.P., An indirect adaptive neural control of a three phase induction motor velocity, CCE (2010) 105–110.
42.
BaruchI.S.Galvan-GuerraR., Centralized direct and indirect neural control of distributed parameter systems, Evolutionary Design of Intelligent Systems in Modeling Simulation and Control (2009) 63–81.
43.
LiT.SunC.ZhaoX., LMI-based asymptotic stability analysis of neural networks with time-varying delays, International Journal of Neural Systems, 18(03) (2008) 257–265.
44.
LiT.LuoQ.SunC.Exponential stability of recurrent neural networks with time-varying discrete and distributed delays, Nonlinear Analysis: Real World Applications, 10(4) (2009) 2581–2589.
45.
LiL.GuoL.SunC., Robust stability for neural networks with time-varying delays and linear fractional uncertainties, Neurocomputing, 71(1) (2007) 421–427.