
Abstract
A novel intelligent control strategy based on a brain emotional learning (BEL) algorithm is investigated in the application of the attitude control of a small unmanned aerial vehicle (UAV) in this study. The BEL model imitates the emotional learning process in the amygdala-orbitofrontal (A-O) system of mammalian brains. Here it is used to develop the flight control system of the UAV. The control laws of elevator, aileron and rudder manipulators adopt the forms of traditional flight control laws, and three BEL models are used in above three control loops, to on-line regulate the control gains of each controller. Obviously, a BEL intelligent control system is self-learning and self-adaptive, which is important for UAVs when flight conditions change, while traditional flight control systems remain unchanged after design. In simulation, the UAV is on a flat flight and suddenly a wind disturbs it making it depart from the equilibrium state. In order to make the UAV recover to the original equilibrium state, the BEL intelligent control system is adopted. The simulation results illustrate that the BEL-based intelligent flight control system has characteristics of better adaptability and stronger robustness, when compared with the traditional flight control system.
1. Introduction
Unmanned aerial vehicles (UAVs) are widely used in military and civilian applications. In recent years, several nonlinear control methods, such as back-stepping, the Lyapunov function and nonlinear dynamic inversion, have been applied in small UAV flight control. Back-stepping techniques can derive air speed and roll control commands from known heading and air speed control laws which explicitly account for the heading rate and air speed constraints of the UAV. A miniature fixed-wing 6-DOF UAV model is used to show the effectiveness in trajectory tracking control [1]. Furthermore, three different approaches based on the state dependent Riccati equation, Sontag's formula and aggressive selection from a satisfying control set are proposed to design the heading and air speed control commands for this UAV [2]. The design of the formation control laws for YF-22 include inner and outer loop design for two aircraft in the formation – the outer loop scheme is based on feedback linearization, while the inner loop scheme is based on a root locus-based approach – and experimental results validate the performance [3]. The above methods improve the attitude and trajectory control performance of UAVs, however, the presented control methods are too complex to design and usually utilize a nonlinear model of a UAV.
Emotions have a strong faculty for decision making. In past decades, modelling of emotion has attracted the attention of many researchers both in cognitive psychology and the design of artificial systems. A network model which simulates the brain emotional learning (BEL) mechanism of mammalians is designed by Moren and Balkenius [4–5]. The BEL model is a computational model which mimics the amygdala, orbitofrontal cortex, thalamus, sensory input cortex and other parts of the brain.
From the BEL model being proposed, it was soon applied into control systems of real engineering fields, termed brain emotional learning based on an intelligent controller – originally proposed by Lucas [6]. In recent years, BEL controllers have proved to have good robustness and uncertainty handling properties when applied in many engineering systems, such as simo overhead travelling cranes [7][8], switched reluctance motors [9], plant level systems [10], alarm systems [11], micro-heat exchangers [12], flight simulation servo systems [13][14] and other uncertain nonlinear systems [15].
The BEL intelligent control scheme has proved to be effective and robust in real systems from the above references. Therefore, in this paper, the BEL intelligent control is initially used to improve the attitude control performance of a small unmanned aerial vehicle (UAV).
The organization of this paper is as follows. The dynamic model of the UAV and the biological structure and the learning algorithm of the BEL model are introduced in section 2. Moreover, the stability analysis of the BEL learning weights is given in section 2. In section 3, the BEL-based intelligent control scheme of the UAV is built up and the control simulation is carried out in section 5. Finally, conclusions are drawn in section 6.
2. Modelling of a small UAV
A physical picture of the UAV studied in this work is shown in Figure 1. It is a small screw propeller UAV of a type usually used in reconnaissance.

UAV physical diagram
For the small UAV without the thrust deflection of an engine, the mathematical model is in the same form as a traditional UAV model, which includes dynamics equations and kinemics equations. The aerodynamic parameters of the small UAV are obtained by blowing experiments.
The components of the total external force on airframe coordinates are shown as

where T is thrust, GX, GY, GZ are the components of the gravity on the three axes of aircraft-body coordinate frame, CD, CY, CL are respectively coefficients of total aerodynamics on the three axes Xa, Ya, Za of the airflow coordinate Q is freedom flow pressure, S is wing area and Sba is the transformation matrix from the airflow coordinate to aircraft-body coordinate frame.
The gravity vector does not generate the torque because it passes through the centroid, then total external torque of normal UAV without thrust deflection is only the aerodynamic torque, and its components on the aircraft-body coordinate frame are described as
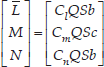
where Cl, Cm, Cn are the aerodynamic torque coefficients around the Xb, Yb, Zb axes on the aircraft-body coordinate frame.
Therefore, it is easy to obtain the dynamics equations of the small UAV which are represented as
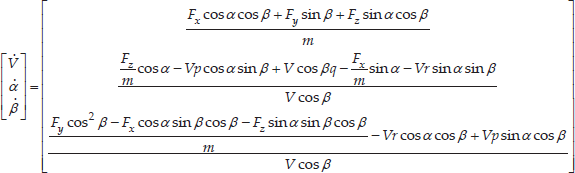

where V is the flight speed, α is the attack angle, β is the sideslip angle, GXa, GYa, GZa are the components of the gravity on the three axes of airflow coordination, p, q, r are the components of the angular rate on the aircraft-body coordinate frame and I is the rotational inertia (the subscript is the rotational axis).
The kinemics equations are given by


3. Modelling and analysing of the BEL algorithm
A. Description of the BEL model
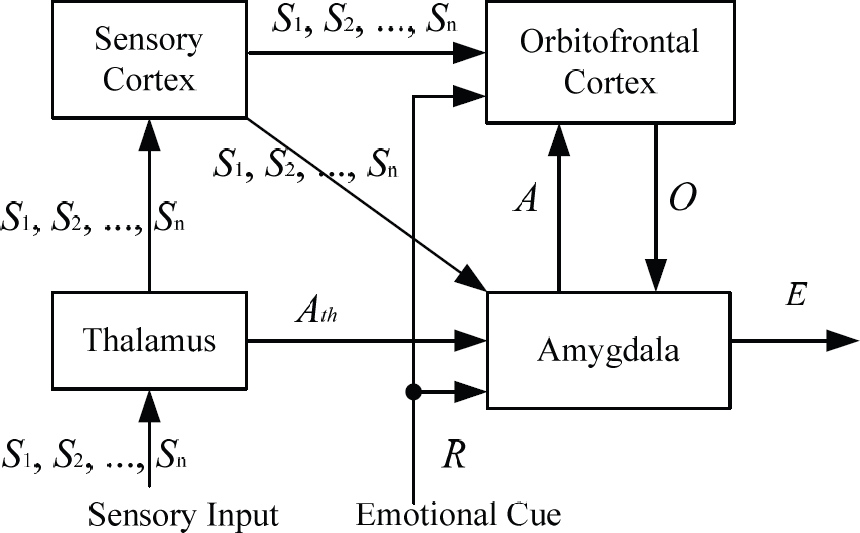
The structure diagram of the computational model of the BEL is shown in Figure 2. There are two input channels including sensory input (which is sent to the thalamus and sensory cortex) and an emotional cue (which is sent to the amygdala and orbitofrotal cortex as reinforcing signals). The amygdala receives inputs from the thalamus and sensory cortical areas, while the orbitofrontal cortex receives inputs from sensory cortical areas and the amygdala only. There is one node for every stimulus both in the amygdala and orbitofrontal cortex parts. In common, there is only one output of the BEL model.
Structure scheme of the BEL model
As can be seen from Figure 2, the BEL system receives inputs from the sensory input S = [S1,S2, …, Sn] and the emotional cue R, and only has one node for output signal E. Generally, the nodes in the orbitofrontal part are equal to the signal input number, while the nodes in the amygdala part are one more than in the orbitofrontal part.
According to the inner structure of the BEL model, the output of the amygdala and the output of the orbitofrontal are respectively described as


where V = [V1, V2, …, V1] T and W = [W1,W2,…,Wn] T are respectively the weights of nodes in the amygdala and the orbitofrontal parts, Ath = max{S}.
The output of the BEL model is expressed by

As an intelligent model simulating the mammalian brain emotional learning mechanism, there must be a self-adaptive and self-adjusting part. Therefore, there are weights in the BEL system that play the role of such self-learning functions, through the adjusting steps named learning rates of the weights, given by
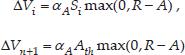

where α A and α O are the learning rate coefficients.
As can been seen from the BEL intelligent algorithm, we note that the weight-adjusting rule is monotonic due to the term max(.,.), the emotional reaction remains permanent if it begins learning, the duty of the orbitofrontal cortex is to promote or inhibit this reaction through the learning process.
B. Stability analysis of the BEL
The stability of the learning weights in the amygdala and orbitofrontal cortex systems is studied in the following.
The state vector of learning weights in the amygdale is denoted as

Thus, the state equation of the learning weights in the amygdale is

where S(k) = [S1(k) S2(k)… Sn(k) Sn+1(k)] T .
When the sensory input signals Si(k) = 0, i = 1,2,…,m, which means there is no learning signal input to the amygdala, thus the learning weight V(k) is certainly stable. Then we consider the situation that at least one of the signal in vector Si(k) is non-zero.
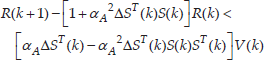
where ΔS(k) = S(k + 1) – S(k), α A > 0, then the system (13) is stable in the sense of Lyapunov.

Define a Lyapunov function as

then the monotonicity of L(k) is verified by

Because αAST(k)S(k)[R(k) – ST(k)V(k)] > 0, we get
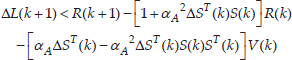
Thus, if (14) is satisfied, there are L(k) > 0 and ΔL(k) ≤ 0. This shows that the system (13) is stable in the sense of Lyapunov, which means that the learning weights in the amygdala are stable in the sense of Lyapunov, and the stable speed is related to the learning rate coefficient.
The state vector of the learning weights in the orbitofrontal cortex is denoted as

Then the state equation of W(k) are

where

Assume at least one sensory input signal is no-zero, the two eigenvalues of G(k) are
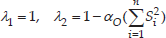
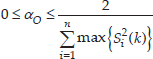
Then system (20) is stable in the sense of Lyapunov.

where U(k) is an orthogonal matrix, and

Select a positive Lyapunov function

According to (23), and R = 0, we get
where

Therefore, if satisfying (22), we get ΔL(k) < 0, therefore system (20) is stable in the sense of Lyapunov.
4. Attitude Control System of a UAV Based on BEL
The nonlinear model of the UAV in this work is expressed by

where X = [u,v,w,p,q,r,θ,Ψ,φ,x,y,h] T is the state vector, in which u,v,w are the components of the flight velocity on the body coordinate, p,q,r are the components of the angular rate on the body coordinate, x,y,h are the position of the aircraft particle on the Earth coordinate and θ,Φ,φ are the attitude angles. U = [δT,δe,δa,δr] T is the control vector, in which δT is the throttle (here it is constant) and δe,δa,δr are the deflection angles of the control surfaces.
The attitude control system of the UAV based on BEL is shown in Figure 3, where θ g represents the desired pitch angle, φ g represents the desired roll angle and Ψ g represents the desired pitch angle.

BEL-based flight control system of the small UAV
The control laws in the elevator controller, aileron controller and rudder controller are respectively designed as



where {K*} are control gains, V3(*) are the weights of nodes for the signal from the thalamus in the corresponding BEL algorithm.
The BEL intelligent algorithm is used to on-line regulate the control gains. The BEL algorithm for the elevator controller is designed by



The BEL algorithm for the aileron controller is designed by



The BEL algorithm for the rudder controller is designed by



where ΔV1, ΔV2, ΔV3, ΔW1 and ΔW2 are the learning rates of BEL systems. γ1 and γ2 are constant coefficients. It should be mentioned that these two coefficients can also exist in (31) and (34).
From the above equations we can see that the BEL-based intelligent controllers almost have the same forms as the traditional controllers for attitude control of the UAV. The main difference between them is that the BEL intelligent controllers can regulate the control gains on-line, which makes them adaptive to variations in system conditions.
5. Control simulation analysis
The main purpose of this work is try to use a structural model based on the limbic system of the mammalian brain, for the attitude stability control of a small UAV with wind interference, to investigate the attitude keeping capacity of the BEL-based intelligent controller.
First, we use the traditional control scheme, while the control gains can be obtained using the single-loop design method, the values of which are shown in the following:

Then, for justice, the above control gains are also used in the BEL intelligent controller, as the initial control gains.
Suppose the small UAV is in flat flight, that is
After calculating the equilibrium state of the nonlinear model of the UAV, the desired pitch angle θ g can be obtained. Consider the control strategy described in Figure 3, in which the structure of the BEL model is described in Figure 2.
Figure 4∼Figure 6 respectively show the system responses of the pitch attitude angle, roll attitude angle and yaw attitude angle based on the traditional controller and the BEL intelligent controller. From the simulation results, we can ascertain that the BEL intelligent controller makes the flight attitudes return to the balanced states quicker and with higher precision than the traditional controller, which shows that the BEL intelligent controller has stronger anti-disturbance capability than the traditional controller.

Pitch angle responses

Roll angular responses

Yaw angle responses
Figure 7∼Figure 9 respectively give the elevator deflection angle curses, aileron deflection angle curses and rudder deflection angle curses of the traditional and BEL intelligent controllers. According to the simulation results, for the BEL intelligent controller, the control outputs of the elevator and rudder are smaller than those of the traditional controller, and the control output of the aileron is the opposite. This shows that the control gains of the BEL intelligent controller are learning and adjusting through the control progress, achieving a better performance, while the parameters of the traditional controller keep constant.

Elevator control output

Aileron control output

Rudder control output
6. Conclusions
To counter the difficulties in the attitude control of small UAVs, a new intelligent controller which is based on the BEL model inspired by the emotional learning process in the A-O system in mammalian brains is applied. The stability of the learning algorithm of BEL is initially investigated in the sense of Lyapunov. Three BEL models are used in designing the control rules of the three manipulators including elevator, aileron and rudder, actually adjusting the control gains of the three controllers.
In the simulation, the BEL intelligent control is applied in the attitude control loop of the UAV under the condition of wind disturbance, making the UAV stable and recovering to the flat flight state. Simulation results show the better control precision and stronger robustness of the BEL intelligent control system, when compared with the traditional flight control system.
However, the selections of the feedback signal, the function forms and the weight coefficients of the sensory input and the emotional cue are the main problem of BEL intelligent control.
In conclusion, BEL intelligent control can be used in a real-time control system on account of the small computational cost and adaptive capacity. Therefore, the promising potential in the application in control fields can be affirmed.
Footnotes
7. Acknowledgements
This study was supported by the NUAA Fundamental Research Funds (no. NS2013029, NP2011012, NP2012101), Aeronautical Science Foundation of China (no. 2010ZA52002), and Specialized Research Fund for the Doctoral Program of Higher Education (no. 20123218120015).