
Abstract
This paper presents a methodology to select the parameters of a nonlinear controller using Linear Matrix Inequalities (LMI). The controller is applied to a robotic manipulator to improve its robustness. This type of dynamic system enables the robust control law to be applied because it largely depends on the mathematical model of the system; however, in most cases it is impossible to be completely precise. The discrepancy between the dynamic behaviour of the robot and its mathematical model is taken into account by including a nonlinear term that represents the model's uncertainty. The controller's parameters are selected with two purposes: to guarantee the asymptotic stability of the closed-loop system while taking into account the uncertainty, and to increase its robustness margin. The results are validated with numerical simulations for a particular case study; these are then compared with previously published results to prove a better controller performance.
1. Introduction
Rigid robots are dynamic systems that have multiple applications in industry, including welding, painting, and assembly of electronic parts. Additionally, robot manipulators can be used either in jobs where human life may be at risk or in processes that require a very high production rate. These numerous applications lead to the development of analytical tools to ensure better performance of the electromechanical systems. There are many research works in this field; for example, the problem of the robot's positioning [1] is a well-researched one in robotics, that is, the way in which its coordinates change. This is a relevant problem because robots are often used to move objects from one point to another. To address this problem, different control strategies using a mathematical model of the manipulator robot have been proposed. This mathematical model can always be represented as follows:

where

D(q)n×n is a positive definite matrix for all values of
1.1 Main contribution
From the section above it may be seen that there are a variety of means to solve the robust control problem in robot manipulators; this work, unlike others, proposes a method based on LMI to select the controller parameters to improve its capability to tolerate the uncertainty of the mathematical model of the manipulator robot. The main result consists in the proper selection of the parameters of a nonlinear controller that heavily relies on the mathematical model of the robot to improve the robustness margin of the closed-loop control system. Firstly, an exact linearization control law is applied, and then the problem is stated as a pole placement control problem for a linear system with dynamics uncertainty. Here, the key point is to properly choose the multivariable state feedback so that the robustness margin is improved. This is achieved by using the Matlab toolboxes software. The aim is to improve the robustness margin through proper allocation of the closed-loop poles of the linear system, thereby compensating for the uncertainty of the mathematical model; previous results are merely based on applying high-gain controllers. The effectiveness of the control law proposed in this work is shown through a series of simulations which are compared with previous results shown in [19].
This paper is organized as follows: Section 2 shows preliminary results required in order to understand the outcome of this research; then, the automatic control problem of the manipulator robot is formulated in Section 3. Next, in Section 4, the main result is presented. Section 5 displays some simulations for the case of a planar robot with two degrees of freedom, and the results are compared to those previously published. Finally, in Section 6, the conclusions of this research work are presented.
2. Mathematical preliminaries
This paper has its basis in the method presented in [14], which verifies the robust stability property for a class of perturbed nonlinear systems with the following structure:

where x ∈ Rn, f(x) and g(x) are functions that belong to a vector field. In Equation (3) the nominal system is

and g(x) is a nonlinear perturbation of the nominal system that satisfies the Lipschitz condition:

It is evident that the above condition prevents the equilibrium point of the nominal system from being modified while uncertainty is present. The method assumes that the equilibrium point of the nominal system (which may be, without loss of generality, x = 0) is exponentially stable; this implies that a Lyapunov function V(x) exists and that it satisfies the following conditions:



The following lemma gives sufficient conditions to verify the robust stability of the perturbed system (3) (see [14]).
This could be particularly relevant with a nominal linear time invariant system with a nonlinear perturbation such as the following:

In this case, the equilibrium point x = 0 is exponentially stable if A is a Hurwitz matrix and the perturbation g(x) satisfies the following conditions:

where λmin(Q) and λmax(Q) are the minimum and maximum eigenvalues of the matrices Q and P, respectively. These matrices are positive definite and satisfy the Lyapunov equation:

In this case, the Lyapunov function is defined as V(x) = xT Px and it is clear that it satisfies the conditions (6)-(8). Note that in (10), the parameter γ of Equation (5) is susceptible to be modified (to increase), since it depends directly on the eigenvalues of the matrices Q and P, which can take different values under the condition that they are positive definite. Moreover, it is possible to note that an increase in the parameter γ would lead to an increase in the maximum bound that must satisfy the nonlinear perturbation, and this in turn causes an increase in the robustness margin of the dynamical system. This opportunity to improve the robustness margin is the main motivation for this research work, however, unlike in [14], the problem here is stated as a convex optimization problem with respect to the parameter γ, which is solved using convex optimization techniques based on LMI.
3. Problem statement
The mathematical model of the manipulator robot that will be considered in this work is the one presented in Equation (1), where τ is assumed to be the control law, which is defined as follows:



where τff represents the feedforward term and τfb is the feedback term of the control law. D0(q) and H0(q, q̇) are the nominal values of the inertia matrix and the vector of centrifugal, Coriolis, friction and gravity forces. These differ from the real values of the robot manipulators, which is why they are defined in a different way.
It is important to mention that the controller's parameters are the matrices Kp and Kv, and they form part of the feedback of the control law. Substituting the control law (12) into the manipulator model (1) the following equation is obtained:

where



Now, with the following definition:

the following representation of the robot in closed loop is obtained:

Where:


It is clear that when the control law (12) is applied to the dynamic model of the manipulator robot, an equation of the form (3) is obtained, making it possible to apply the results from Lemma 2.1 in order to ensure the asymptotic stability property in the manipulator's control system; however, as mentioned in Section 2, the parameters Kp and Kv of the control law can be selected so that the upper bound of the nonlinear perturbation (10) increases, thereby increasing the robustness margin of the control system. Hence, the problem can be stated as follows:
Given the dynamic system represented by the following equation:

The matrices Kp and Kv are selected so that the control system represented by the Equation (23) is asymptotically stable and additionally maximizes the parameter y to satisfy the following condition:

4. Main result
The main result of this work is based on Lemma 2.1, it is therefore necessary to establish the conditions that satisfy Equation (22). From the definition of g(x) the following condition can be obtained:

Since matrix D(q) is a positive definite matrix, the following condition can be guaranteed (see [15], [16]):

Therefore, we have:

Now, assuming that the uncertainty between the vectors H0(x) and H(x) is upper bounded, and that in the equilibrium point (x = 0) both vectors have the same value, the following inequality is obtained:

resulting in the following condition:

On the other hand, the inertia matrix D(q) is a positive definite matrix that is lower and upper bounded by positive definite matrices. Additionally, the controller's matrices Kp and Kv require bounded elements to guarantee the Hurwitz property in matrix Ac; hence, it is always possible to obtain the following relation (see [9]):




Therefore:

This condition allows us to apply the result presented in Lemma 2.1 to the case of the robotic manipulator dynamic system. As mentioned earlier, in Equation (10) it can be noted that it is possible to increase the upper bound by appropriate selection of the matrices Kp and Kv, which in turn will increase the ability of the robot manipulator closed-loop system to support greater uncertainty. To do this, a search procedure based on LMI is performed. This procedure is based on the results presented in [17], for which the following theorem and corollary are now presented.


where matrix P is a definite positive matrix. The derivative of V(x) is given by the following expression:

Using the Cauchy-Schwarz inequality [18] and inequality (34), the following condition is obtained:

Now, using the following algebraic inequality:

the following relation is derived:

finally obtaining:

From the above, we can state that the system is asymptotically stable if the following condition is satisfied:


subject to:

where

To prove the corollary it is necessary to start from the

This equation, according to the above theorem, guarantees the preservation of the asymptotic stability. Now, representing the matrix Ac as follows:

where:

the following equation is obtained:

If X = PL, then

This matrix inequality is quadratic with respect to P and linear with respect to X, making it possible to show the convexity of the inequality with respect to P and X for a given γ. Now, applying the Schur complement for matrices:

the following matrix inequality is obtained:

Finally, defining the value of ρ = −1/γ2 yields the following matrix equation:

From the definition of ρit can be seen that maximizing the value of γ is equivalent to minimizing the value of ρ. The problem can therefore be stated as:

subject to:

For a given ρ, the above inequality is affine with respect to the parameters P and X; therefore, the solution can be calculated using convex optimization techniques based on LMI. Also, this solution can be implemented with the aid of computational languages such as Matlab. It is worth noting that the calculation performed to maximize γ does not directly depend on the dynamic model of the robot, because the elements of the matrix Ac are the controller parameters Kp and Kv, which can be modified themselves to maximize the parameter y. This is possible because the uncertainty that exists between the nominal model used by the control law and the real model of manipulator robot was completely transferred to the function g(x). Accordingly, when the upper bound value is increased by manipulating the parameters Kp and Kv, the robustness margin of the closed loop system increases too. Then, applying Matlab toolboxes to solve the convex optimization problem, it is determined that the solution is to assign the eigenvalues of Ac, all real, in the same position, and of course negatives. Thus, the more negative the eigenvalues of Ac are (away from the imaginary axis), the more the robustness margin y increases. However, placing the poles so far away from the imaginary axis results in high controller gains, which is not always desirable because not only does disturbance rejection increase, but also the noise in the measurement sensor is amplified. Fortunately, this problem can be solved by defining a minimum bound to stop the algorithm. This option is defined as (TARGET) in Matlab; it allows the solution of the problem stated in Corollary 4.2. Next, numerical results obtained from simulating a manipulator robot with two degrees of freedom while applying this methodology are presented.
5. Simulations
The method was applied to the case of a planar robot presented in [19], shown in Figure 1.

Two-joint SCARA-type robot manipulator.

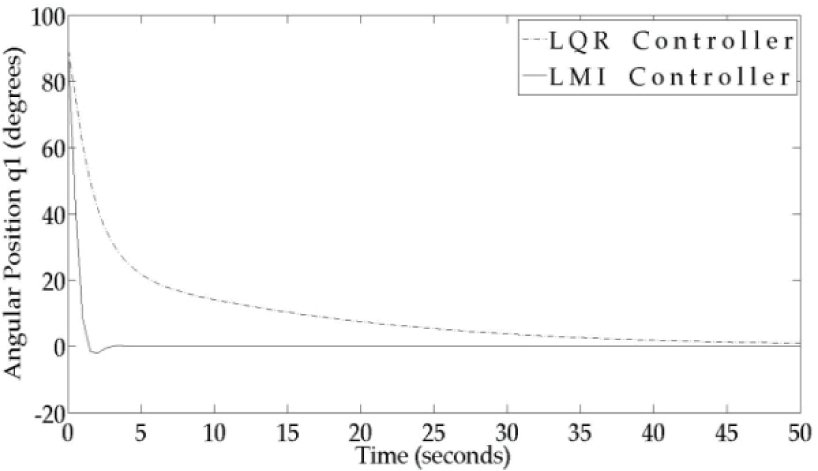
Transient response for q1 with mL = 20

Transient response for q2 with mL = 20
The manipulator has the following mathematical model:


and its elements are:

where mL represents the mass of the object to be moved with the manipulator, which, in practice, may change in value. In this work, as in [19], the mass is considered to be an uncertain value represented by the following range of values: mL ∈ [4,22] considering mL = 20 as the nominal value. Using the Matlab LMI toolbox, the following controller parameters are obtained:
In [19], using LQR optimal control techniques, the following parameters were calculated:
These parameters, defined in (38) and (39), are substituted into the control law (12); the following simulation results can then be obtained:

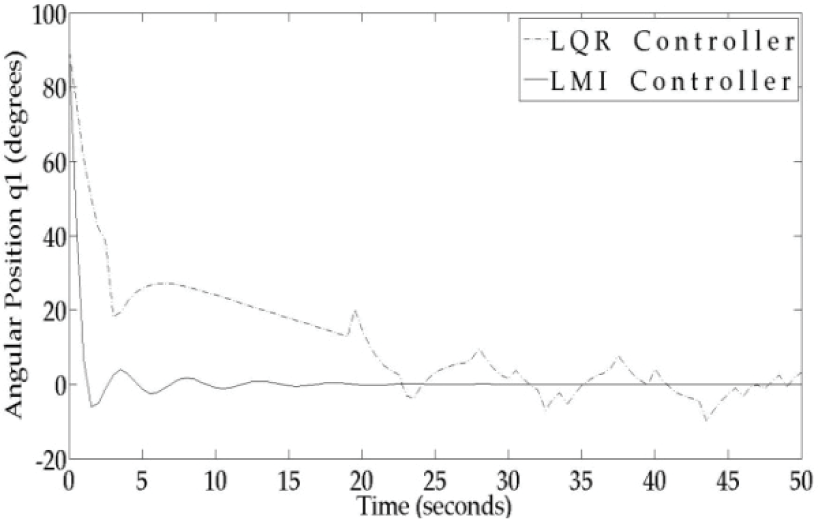
Transient response for q1 with mL = 15

Transient response for q2 with mL = 15

Transient response for q1 with mL = 4

Transient response for q2 with mL = 4
Transient response for q2 with mL = 21

Transient response for q2 with mL = 21
Transient response for q2 with mL = 21.8

Transient response for q2 with mL = 21.8
As observed in the previous simulations, the closed loop control system for the robot manipulator performs better despite the uncertainty of the mass of the load when using the control law proposed in this research, mainly when this is bigger than its nominal value. This is logical because it is easier to move something light than something heavier.
6. Conclusions
This paper presented a new tuning method for a special control law to guarantee an increase in the robustness margin of the closed loop system of a robot manipulator based on its mathematical model. The control strategy consisted in transforming the original problem into a convex optimization problem, in order to use a methodology known as LMI to solve it. The results were validated by performing numerical simulations and then using a comparison to show the inferior performance of LQR optimal control techniques. An idea for future research would be to apply the technique presented in this paper to other types of robots, such as Unmanned Aerial Vehicles (UAVs).
Footnotes
7. Acknowledgments
The author wishes to thank the Fondo Mixto de Fomento a la Investigación Científica y Tecnológica-Gobierno del Estado de Tamaulipas for the financial support granted through the project agreement 185932. Thanks also go to the Universidad Autónoma de Tamaulipas for its support in this research project.