
Abstract
This paper presents a fuzzy logic design of a tele-control electrical vehicle system. We showed that the application of fuzzy logic control allows the stability of tele-vehicle system in spite of communication delays between the operator and the vehicle. A robust bilateral controller design using fuzzy logic frameworks was proposed. This approach allows a convenient means to trade off robustness and stability for a pre-specified time-delay margin.
Both the performance and robustness of the proposed method were demonstrated by simulation results for a constant time delay between the operator and the electrical vehicle system.
1. Introduction
Tele-control vehicles play an important role, especially in hazardous environments such as with the inspection of underwater structures [1], demining [2] and cleaning nuclear plants [3]. During the past two decades, the bulk of the work in vehicle tele-control has focused on rate-controlled systems for hazardous environments. In these systems, a trained operator controls the vehicle's rotation and translation speed via hand-controllers and receives feedback from video cameras. McGovern reported on work with a fleet of wheeled ground vehicles: small indoor robots to large outdoor military automobiles [4]. More recently, vehicle tele-control systems have emphasized the use of multi-modal operator interfaces and supervisory control [5] [6].
With a tele-control system, the information flow between the electrical vehicle and its operator significantly affects the operator's dexterousness and efficiency. As such, the two major issues with tele-control electrical vehicles are stability – and robustness – and transparency performance.
Only a few works have analysed these subjects collectively and a very small part of the literature on tele-controlled electrical vehicles is devoted to the concept of stability. An initial approach, developed by [7] consists of the use of the robust control theory (H∞ synthesis). These methodologies require a linear model for the master and the slave. It allows the development of a closed loop system which is robust to a class of uncertainties and the specification of a performance level. In this case, the delay is modelled as an inverse multiplicative uncertainty [7]. Nevertheless, these methods are limited to the case of constant delays, which is rather restrictive, and the selection of the weighting functions is not simple.
In [8], the authors describe an adaptation scheme for the tele-control of an electric vehicle. The performance variation due to the varying network and packet losses is investigated and catered for by the use of adaptive gain scheduling as well as varying the time delay load in the design framework. In this application, the developed method does not take into account any of the scaling factors.
In our previous work [9], we have used passivity approaches with wave variable formalism and (PI, PID) controllers in order to ensure the stability of the system in spite of communication delays and scaling factors between the operator and the electric vehicle. The passivity conditions are given and the stability is proven for the tele-control of the electrical vehicle system. However, such designs do not allow the pre-specification of the type and magnitude of nonlinearities, external disturbances and uncertainty parameters on the dynamics of the environment
For others applications, many approaches are proposed in the literature to deal with bilateral teleoperation with time-varying delays [10–16]. An interesting comparative study is given in [17]. Niculescu et al. [18] have considered the same scheme of Anderson and Spong [1] and they proposed a frequency method which permits the determination of the t PI controller parameters such that the stability of the closed-loop system is preserved in the presence of communication time delay. Besides the passivity approach, Leung et al. [19] have formulated the just mentioned problem as a standard H∞ problem where the master and slave manipulators are both stabilized locally without contact force as an assumption. In the case where there is a contact force, a third controller is added in order to guarantee the stability of the closed-loop system. However, the time delay is reflected as a perturbation to the system. These methods have proven their robustness in the presence of time delays. However, their application in the presence of different-scaled worlds with scaling effects problems has never been validated.
The problem considered in this paper is the design of, a bilateral controller for an electric vehicle tele-control system based on the fuzzy logic approach. Fuzzy controllers use a mode of approximate reasoning, which enables the systems to make decisions based solely on vague and incomplete information, which is similar to that of human beings [18]. Two concepts – i.e., the linguistic variable and the fuzzy “if–then” rule within fuzzy logic – play central roles in its applications. The linguistic variable is interpreted as a label of a fuzzy set that is characterized by a membership function [21]. A fuzzy rule is decomposed into antecedents and consequents that contain linguistic variables. Fuzzy control is one of the most common methods the implementation of telerobot control strategies, while still being robust even in the case of a vague environment such that they can represent an apparent structure of the controller. It also has many advantages, such as low sensitivity to a variation of parameters or noise levels, and a wide range of applications [22]. However, the total number of fuzzy rules and adjustable system parameters increases exponentially with the number of input variables in the standard fuzzy reasoning process [23]. This imposes a heavy burden on the system because of the control speed and cost. Therefore, a system with many input variables needs a special fuzzy reasoning system for robust control and a low number of rules.
The present paper is organised as follows: Section 2 consists of the design of a fuzzy controller with compensation for time delay. Section 3 is devoted to the developed electrical vehicle and the tele-control system is introduced, with various simulations given in order to prove the effectiveness of the proposed approach
2. Design of a Fuzzy Logic Controller
A Tele-control system is primarily built out of master and slave components, connected by the communication line. Usually, the communication network is carried out by a segment of the Internet and a local serial link, as shown in Fig.1. The controller to be used for the teleoperation system needs to satisfy certain requirements, such as stability under a specified environment, on-line optimum scaling parameters, communication time delay and modelling errors due to the nonlinear behaviour of different master and slave robots. This section analyses a fuzzy logic design framework for optimum bilateral controller design. The aim of this work is the control of the electrical vehicle where the ground forces are relayed back to the operator, who in turn effects changed in the vehicle steering system.

Tele-control electrical vehicle system
2.1 Bilateral System Architecture
The block diagram of the bilateral control of a tele-electrical vehicle system integrating time delay and parameter variations is shown in Fig.2. The relationships between the master and slave in terms of position and force are defined as:
Bilateral system architecture with time communication delay a result for each, then combining the results

where xm and xs are the position command from the master and slave position, respectively; fh and fs are the operator force command and the external force from the slave to the master. The transfer functions of the master and the longitudinal model of the electrical vehicle (slave) are represented by Pm(s) and Ps(s), such that [7]:

where mm and ms denote the mass of the master and the slave, km and ks the compliance coefficients, bm and bs denote the viscosity coefficients, and the terms, fh and fs are the operation force and the reaction force while the output master and slave positions are, respectively, xm and xs. As the slave (vehicle) is in contact with the environment, it can be expressed by the tire/road forces. It can be modelled by an impediment and Se (Se = Be S+Ke) is the nominal environment. Gs presents the slave, which is in contact with the environment Se and the position of the slave is controlled by Ks. The varying time-delay from the master to the slave, and vice-versa, are represented by e−sT1 and e−sT2. Consider the fuzzy logic design of controllers for the master and slave for free motion. Let Km and Ks denote free motion controllers for the master and slave, respectively. They are designed to satisfy performance specifications for free motion. K is the bilateral controller for the constraint motion.
2.2 Fuzzy Controller Design of the Master
For the master controller design, the specifications are taken to be as follows. The master position xm should track the reference fh and the plant Um should not exceed a pre-specified saturation limit. The fuzzy design of Km may be carried out with reference to Fig.2.
The fuzzy design procedure may be carried out using the Fuzzy Logic Toolbox of MATLAB [25]. Fuzzy controllers are very simple, conceptually, consisting of three main parts: fuzzification, fuzzy reasoning and defuzzification. They consist of an input stage, a processing stage and an output stage. The input stage maps error or other inputs, such as switches, etc., to the appropriate membership functions and truth values. The processing stage invokes each appropriate rule and generates of the rules. Finally, the output stage converts the combined result back into a specific control output value. In our case, the master position is compared with a reference, and if there is a deviation, the controller takes action according to the control strategy. In order to obtain high performance, the membership functions were constructed within the small range of the position.
Fuzzy logic is applied for deciding the proper holding time from this data. The fuzzy membership functions for one input and one output have the shape of a triangle and Gaussian functions, as shown in Fig.4. The fuzzy rule implemented in this application is presented by the rule surfaces shown in Fig. 5. Mamdani's fuzzy implication and the max-min composition were used for the fuzzy reasoning and the defuzzification strategy, which is implemented as a centre of gravity method [26].

Design of master controller Km.
Fuzzy membership functions (a) input variable (fh-xm) (b) output variable (um)

Fuzzy rule surfaces
The closed-loop step response of the master controller is shown in Fig.6. The master controller Km presents good positioning performance: a settling time in the order of 300ms with a positioning error of less than 1%. It can be noticed that the positioning instabilities are almost negligible. Furthermore, the robustness is proven since when the mass of the master mm is increased by 50%, the positioning response maintains its stability and performance (Fig. 6). This proves that the master fuzzy logic controller Km ensures a good compromise between performance and robustness.

Step response of the master: xm,xm-fh with nominal mm and with.an increase in mm.

Design of slave controller Ks.
2.3 Fuzzy Controller Design of the Slave
The synthesis of the slave controller Ks is obtained according to the implementation shown in Fig.8 using the Fuzzy Logic Toolbox of MATLAB [24].

Fuzzy membership functions (a) input variable (xm) (b) input variable (xs) (c) output variable (us)
For the slave controller design, the slave position Xs should track the master position Xm(t-T) and the control Us should not exceed a pre-specified saturation limit. The fuzzy design of Ks may be carried out as per Fig.8. The fuzzy membership functions for two inputs and one output are in the shape of a triangle and Gaussian functions as shown in Fig.9. The fuzzy rule implemented in this application is presented by the rule surfaces as seen in Fig. 10.

Fuzzy rule surfaces
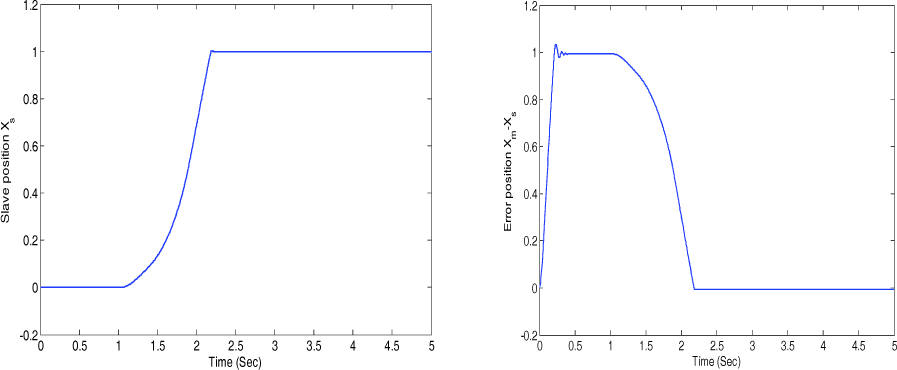
Response of the slave with delay: Xs, Xs -Xm
Fig.10 shows the closed-loop step response of the slave.
2.4 Fuzzy Bilateral Controller Design
The design specifications for the fuzzy bilateral controller K are taken as the following: stabilizing for up to the pre-specified amount of time delay, stabilizing for up to the pre-specified amount of variations in the environment, the feedback force of the master hand controller should track the force sensed on the road by the electrical vehicle and the control torques should not exceed the pre-specified saturation limits.
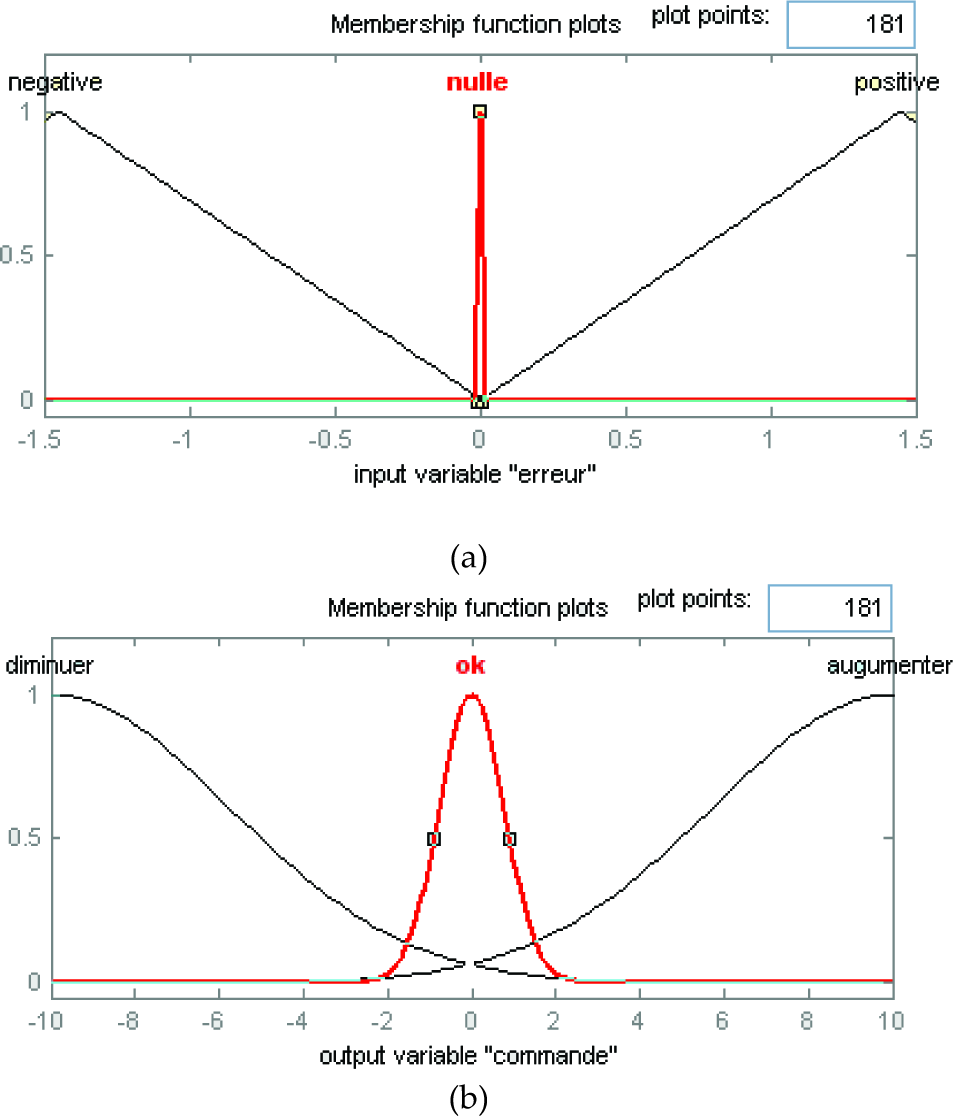
The fuzzy framework design of K may be carried out with reference to Fig.11. For this design, the slave force fe is compared with a reference fh, and the controller takes action according to the control strategy. For this, the membership functions were constructed within a small range of the force. Fuzzy logic is applied in deciding the proper holding time from this data. The fuzzy membership functions for one input and one output are in the shape of a triangle, as shown in Fig.12. The fuzzy rule implemented in this application is presented by the rule surfaces, as in Fig. 13.

Design of the bilateral controller K

Fuzzy membership functions (a) input variable (fh) (b) input variable (fe) (c) output variable (u)

Fuzzy rule surfaces
3. Simulations Results
To illustrate the behaviour of the tele-control system and in order to confirm the findings of the previous section, the bilateral controller K was designed using the Fuzzy Logic Toolbox from MATLAB. Table I gives the parameters of the simulation. The set of simulations of Fig.14 shows the position (Fig. 14a) without the environment and the force (Fig. 14b) with the gripper in contact with the environment without time delay. The results demonstrate the excellent position and force tracking of the proposed tele-control system under ideal conditions (without time delay).
Simulation Parameters


Simulation results of (a) position and (b) force tracking for a step trajectory with no time-delay. Blue lines (master), red lines (slave).
To emphasize the delay problem over the internet, Fig.15 demonstrates the influence of this parameter on the stability of the bilateral controller. If not dealt with, this might cause instabilities without fuzzy logic controllers.

Instabilities of the bilateral controller due to time-delay (T=1 sec) without fuzzy logic controllers
Fig.16 shows the stability of the bilateral controller K given a time-delay of 1 second. It represents the step response of the fuzzy bilateral controller
Step response with a delay of 1 second
The task-based bilateral controller K has been synthesized for trading off various performance criteria (force, position) and robustness (time delay and variations of the environment).
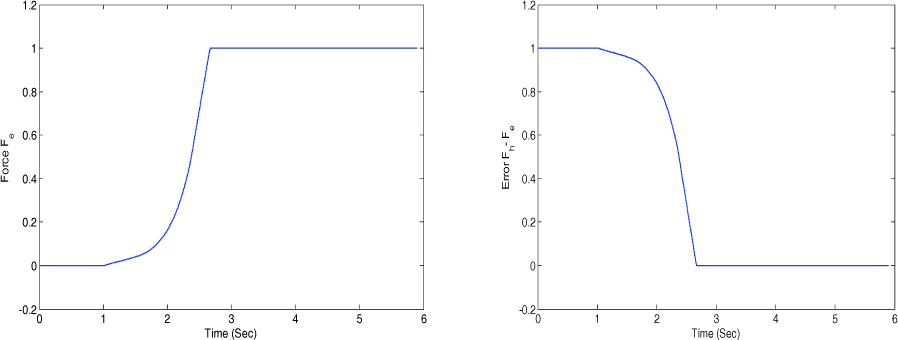
The simulations presented in Fig.17 show the step response for the force in the case of the variation of the operating environment. In both cases, the proposed bilateral controller design ensures the robust stability of the force against strong variations of the environment and stiffness ke (±50%).
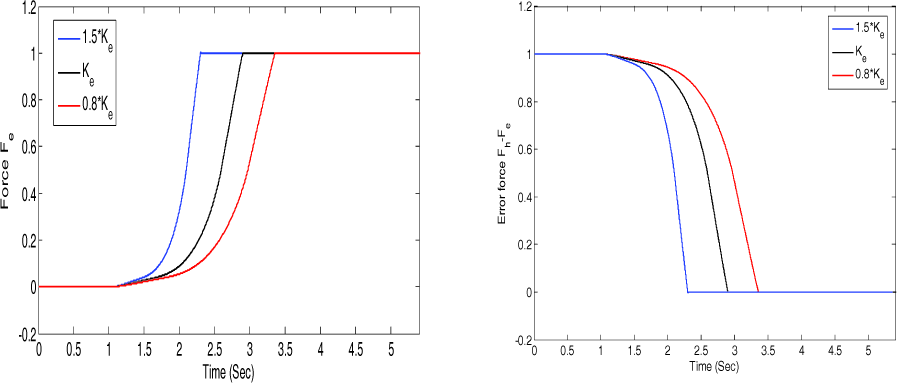
Step response of the force with time-delay and the environment stiffness Ke=(0.15,0.1,0.05 N/m).
4. Conclusion
In this paper, we have proposed the design of a tele-control electrical vehicle system. This controller ensures the stability and robustness of the system and takes into account communication delays and environmental variations.
The simulation results showed better results when considering a constant time delay with environmental variations in terms of stability and robustness.
In comparison with our previous work [9] using a passivity approach with wave variable formalism and (PI, PID) controllers, the design of a fuzzy control proved to be very effective in cases where the uncertainty has unknown sources (modelling errors of the environment, strong nonlinearities of the dynamics of the electrical vehicle varying with time and operating conditions) and is hard to measure (measurement noises, the limited resolution of sensors).
Previous developments in [7] have shown that H∞ is not well adapted to tele-control and electrical vehicle constraints. The selection of the weighting functions in H∞ control is very difficult and the order of the bilateral controller is very high and so its implementation does not seem very easy. The same difficulty for the implementation of adaptive gain scheduling in the design of a tele-control electrical vehicle system is given in [8]
The main problem in the synthesis of the fuzzy controller lies in designing the fuzzy rule. In future work, we propose another approach to designing an optimal fuzzy controller and an experimental validation will be tested.