
Abstract
In this paper, we present a model-based analysis of the standing posture control mechanism with consideration to mental workload and the physiological features of sensory feedback. It has been known that standing posture control is not performed autonomously or unconsciously but is affected by “working memory” [1]. In order to investigate how mental workload in working memory influences standing posture control, we consider the feedback groups in the standing posture control mechanism which include the viscoelastic characteristics of the musculoskeletal system and sensory feedback. We use a centre of pressure (COP)-based tracking task to investigate the influence of mental workload on voluntary (tracking) movement. Maurer-Peterka's model is applied to analyse the standing posture control mechanism, with respect to a change in the internal processes. The simulation results show the relationship of the feedback gain and its delay from the central nervous system with the standing posture control performance. The proposed model-based scheme provides a comprehensive view for physiological data analysis of human body movement in relation to mental workload.
Keywords
1. Introduction
To maintain the standing mechanism in humans is a highly sophisticated control action that is based on the interaction between the sensory system and the motor system [12][10]. It is well-known that elderly people who suffer from a functional decline in the sensory system or a cognitive disorder are generally impaired in their ability to control their standing posture [22][30]. For analysis of the standing posture control task (hereafter standing task), we need to understand not only the compensation by reflex of postural instability, but also biomechanical constraints such as the centre of gravity and weight [12], the moving strategy of the centre of gravity [7], [26], and sensory perception related to a priority over the visual system, the vestibular system and the somatosensory system [32].
A wide ranging study of the standing task has been carried out. Humans stand in an upright posture by contracting or relaxing the muscles in the musculoskeletal system, based on information processed in the central nervous system. A neurophysiology-based approach has been made by many researchers to understand the standing task mechanism. The difference in standing task performance was analysed when the subjects' vision was blocked [13] and when various types of stimuli were provided [9]. A motion analysis approach of the standing task control performance has also been conducted. Sakakibara [35] quantified the control performance for maintaining standing posture with respect to aging and other disorders. The evaluation method developed in the study can be applied to the clinical judgment of the decline in balance ability, restoration of neurological function and so on. The other methods include the Berg Balance Scale [3][4] and Romberg's test [17] which evaluate postural balancing performance of the elderly or stroke patients and lesion of the proprioceptive mechanism, respectively. The centre of pressure (COP) is the point of the resultant force of a person who acts on a supporting surface. The fluctuation, speed, and position of the COP were used [11][23] to evaluate standing posture control performance.
A model-based stability evaluation method of standing posture control was developed in [18], where proportional-integral-derivative (PID) gains of the standing posture control model were identified and the differentiator gain, which was considered as an index of balance ability, increased with the subject's age. Kawaguchi T, et al. [16] developed a standing posture control model with consideration given to the visual system, the vestibular system and the musculo-skeletal system. The results of this work showed that the vestibular system plays an important role in stabilizing standing posture. Masani, K., et al. [24] constructed a proportional-derivative (PD) controller to stabilize the standing performance of an inverted pendulum based body model. Although the reflex action considered to contribute directly to system stabilization was ignored in [28] and [21], standing posture was successfully realized by adjusting the feedback gains. The standing posture control models, which take into account functions of the cerebellum, were proposed in [15] and [27]. PID controllers were applied in [5], and [25] to minimize the COP-based indices which evaluate the stability of standing posture. The parameters' behaviour in the developed standing posture control models was investigated with respect to the applied disturbance in [19], [33], and [31].
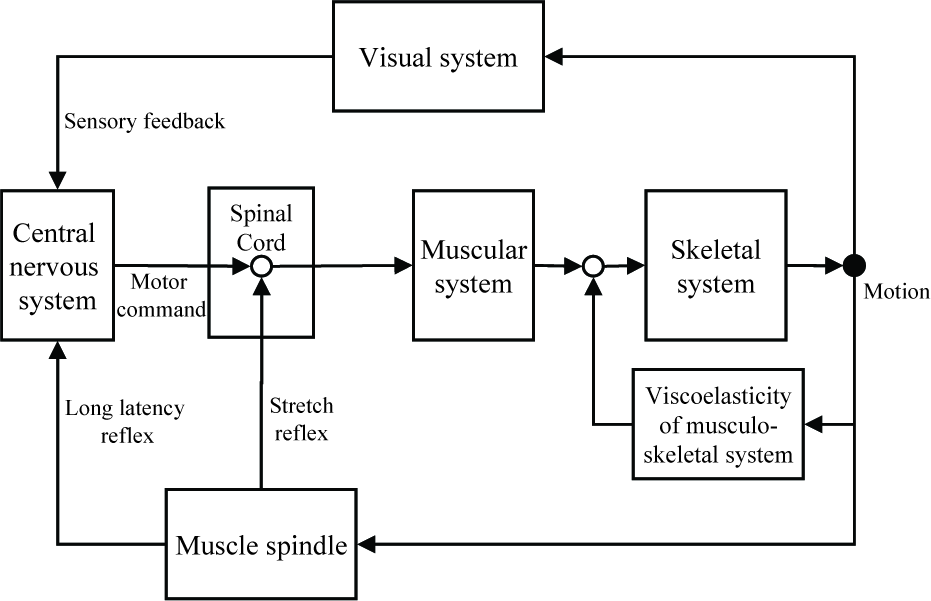
In this paper, we present a new model-based analysis of the standing posture control mechanism with consideration given to mental workload and the physiological features of sensory feedback. Lum and Fasoli et al. [8][34][36] showed that robot-aided rehabilitation has many advantages over conventional therapist-based rehabilitation methods in terms of the recovery of motor function, physical balance support in specific tasks through reinforcement learning, patient-centred rehabilitation process and the enlargement of joint range of motion, since a robot can provide accurate motion and force trajectory tracking performance. The tracking performance in robot-aided rehabilitation, however, is generally affected by the mental workload of the subject. It is desirable to keep the subject concentrating on the rehabilitation task based on the quantitative evaluation of the effect of subject mental workload on the rehabilitation task. It has been known that standing posture control is not performed autonomously or unconsciously but is affected by “working memory” [1] which is thought to be located in the hippocampus and used for temporarily storing and managing information that is required to carry out complex cognitive tasks (such as learning, reasoning, and comprehension). In order to investigate how the mental workload in working memory influences standing posture control, we consider the feedback groups in the standing posture control mechanism, which include the viscoelastic characteristics of the musculo-skeletal system and sensory feedback. It should be noted that the control mechanisms of human bodies include the stretch reflex and the long latency reflex as shown in Fig. 1. We confirmed in the preliminary experiment that it is difficult to measure a change in body reflex movement that comes from a change in mental workload. Therefore, in this paper we focus on the influence of the mental workload on voluntary movement.
Control mechanism of human body
We develop a control theory based human body model and analyse the influence of mental workload on the voluntary body movement of subjects who are conducting center-of-mass(COM)/COP-based tracking tasks, based on a change in the internal processes of the body model. The simulation results show the relationship of the feedback gain and its delay from the central nervous system with the standing posture control performance. The proposed model-based scheme provides a comprehensive view for the physiological data analysis of human body movement in relation to mental workload. In the developed COP-based tracking task, the COP position of the subject and its target are made with white noise and are shown on the monitor in front, and the subject is asked to track his/her COP position to its target. We also show that the root mean square errors and phase lags of COM/COP displacements can be used as measures of physiological feedback gain and its delay. Based on the relationship between the feedback gain, the feedback delay and COM/COP displacements, we can estimate the mental workload of the subjects who are conducting a COM/COP based tracking task.
2. Standing Posture Control Model
In the literature including [2][6], the statistical processing of standing task performance such as COP oscillation was performed. However, how mental workload influences the standing posture control mechanism has not been addressed. In this section, we develop a control theory based human body model and analyse the influence of mental workload on voluntary body movement in the standing posture control mechanism.
As mentioned before, various mathematical models for the standing posture control system have been proposed. The human musculo-skeletal model developed in [15] fully simulated the human walking mechanism. Although this model is considered to reliably simulate the human walking mechanism, a large computational effort is required due to the highly nonlinear dynamics of the model and the large number of parameters. On the other hand, the approach reported in [24] used a simplified model and extracted only the information of interest. This model requires low computational effort and the parameters of this model are easily converged. But in some cases this model is not reliable since it generally represents only the macroscopic behaviour of the system. Therefore, both simulation and experiment should be conducted for model validation.
In this study, we adopted the Maurer-Peterka model [25] that represents voluntary movement based on the feedback from the central nervous system. With properly selected parameters for the model the standing posture evaluation values converged to the actual values. As shown in Fig. 1, the human body has 4 feedback groups that influence the body's movements. They are the long latency reflex, the stretch reflex, the viscoelasticity of the musculo-skeletal system and sensory feedback. However, the first two feedback groups were ignored since the influence of the mental workload is only observed in voluntary movement. As pointed out in [25], the influence of the viscoelastic characteristics of muscles on the feedback loop of the standing posture control system can be ignored. In order to investigate the influence of the dual task, we modelled a voluntary movement based feedback loop from the central nervous system, but we did not consider the passive torques of both ankles, which are related to the viscoelastic characteristics of muscles and reflex movement.
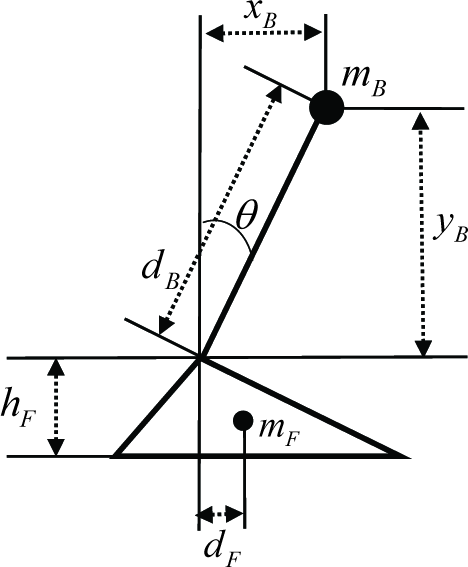
In Maurer-Peterka's model, the skeletal system of the human in standing posture was modelled with a single inverted pendulum as in Fig. 2, where standing posture control was applied in the sagittal plane. The single inverted pendulum model consists of a foot segment (under the malleolus) and a leg segment (above the malleolus), and the single inverted pendulum is set on the ankle joint. This model enables us to simulate the central nervous system that senses a deviation of the body away from an upright reference position, and then sends commands to various muscles to generate a corrective torque of the ankle joint for resisting the deviation of the body position away from an equilibrium state. The average values of a Japanese adult male (Table 1) are applied to the parameters of the single inverted pendulum model of Fig. 2, where dB, xB and yB are the Euclidean distance, the horizontal distance and the vertical distance between COM of the whole body and the ankle joint, respectively; mB is the body mass except for the foot segment; hF is the vertical distance between the ankle joint and the base of support; dF is the horizontal distance between the ankle joint and the COP; mF is the mass of the foot; JB is the inertia moment excluding the foot segment.
Parameters of the body model

Single inverted pendulum model
When the subject inclines his/her body from the standing posture, the inclination angle θ detected by the receptor organ is sent to the central nervous system through a feedback loop with the gain Kf and the delay time of τ d . The control input, the torque of the ankle joint Ta is generated in order that the difference between it and the reference signal converges to zero. Here, the kinetic energy K and the potential energy P of the inverted pendulum model can be represented as follows.


Therefore, the resultant torque Ttotal is represented by the Lagrangian equation of motion as follows:



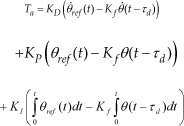
The central nervous system is represented with a PID controller that adjusts the proportional gain KP, integral gain KI, and derivative gain KD, and obtains the torque of the ankle joint Ta as follows.
In order to represent natural behaviour, the disturbance torque Td is applied to the single inverted pendulum model together with the ankle joint torque, Ta. The disturbance signal w is filtered with the cutoff frequency determined by the time constant τ N of the first order low pass filter and the gain KN, as follows.

COM and COP are calculated by (8) and (9) as follows:

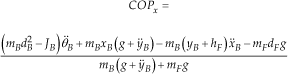
Here, g is gravitational acceleration. Maurer's parameters in Table 2 were used for the values of KP, KI, KD, KN, τ d .
Parameters of the control model

Maurer-Peterka's model can be equivalently presented as Fig. 3. Here, the signal transformer fST is a function that transforms the angle of the ankle joint to the COM and COP positions, when the subject sees the current signal that is projected on the monitor. The inverse transformer f−1ST is a function that transforms from COM and COP positions to the angle of the ankle joint. It is notable that f−1ST is easily obtainable both in static and dynamic situations.

Modified Maurer-Peterka's model
Here, we make hypotheses on the influence of the dual task on standing posture control, and examine the hypotheses based on the analysis of simulation results. Since the influence of the dual task was observed in voluntary movement, we made two hypotheses as follows.
(Hypothesis 1) As processing resources for the dual task increase, processing resources for the standing task decrease and accordingly the feedback gain of the central nervous system decreases.
(Hypothesis 2) The dual task and the standing task are conducted internally one after the other which increases the time delay of the feedback loop of the central nervous system.
In order to examine these hypotheses, we conducted simulations using the developed standing posture control system and investigated the behaviour of COM/COP displacements.
3. Model-based Standing Posture Control Analysis
3.1 Simulation of the COM-based tracking task
In order to verify the adequacy of the developed model, we simulated the COM-based tracking task. This is because the tracking problem of the inclination angle τ in the original Maurer-Peterka's model is equivalent to the tracking problem of the COM. Therefore in this simulation, we set the reference of the inclination angle, and transformed it to the references of the COM (fST(τ ref )=COMref). The simulation result is shown in Fig. 4, where the feedback gain of Kf was increased from 1 to 1.71. When Kf is around 1, the tracking task was carried out in a stable manner. As Kf is increased, however, COM displacement grows bigger and eventually diverges when Kf is around 1.7. PID gains of the central nervous system have to be tuned according to the tracking signal. However the overall behaviour of the COM-based tracking task for humans is well represented by Maurer-Peterka's model. In order to make the reference signal unpredictable to the subject, we used white noise in the experiment. However in the simulation, we used a sinusoidal reference signal for evaluating the behaviour of COM, COMref, COM displacement, τ and τref, with respect to the value of Kf.

Illustrated example of the variables when Kf is increased from 1 to 1.71
3.2 COM and COP displacements w.r.t. Kf and τd
We investigated the influence of the feedback gain and its delay from the central nervous system on the standing posture control model of Fig. 2. We conducted simulations, changing the feedback gain and its delay around the initial values (Kf=1, τd=0.171[sec]). The standard deviation of COM/COP displacements obtained by simulation are shown in Fig. 5 and Fig. 6, where for easy analysis, the maximum displacements were set to 0.12 [m] in the figures.
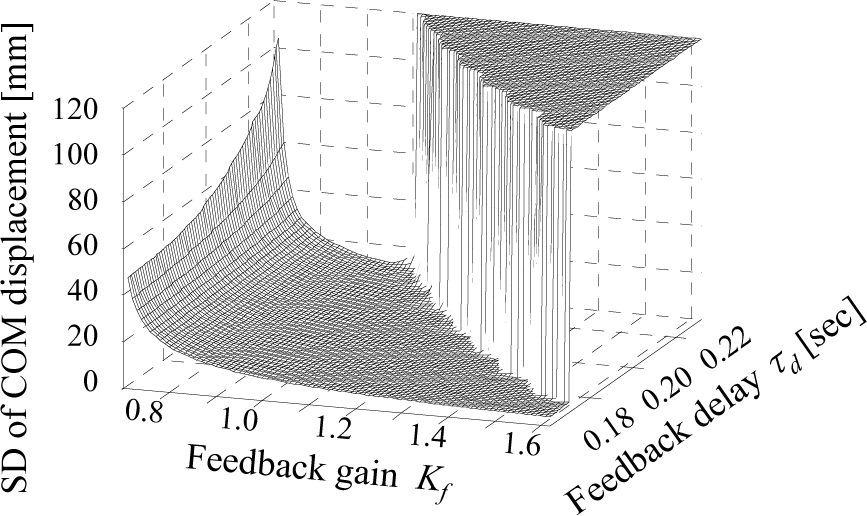
COM displacement with respect to Kf and τd

COP displacement with respect to Kf and τd
As the feedback delay τd, increases, the tolerable range of the feedback gain Kf becomes narrower to keep COM/COP displacements small, that is, to stabilize the standing posture control system. Therefore, a narrow tolerance of the feedback gain Kf can make the system unstable. As the feedback gain Kf increases, on the other hand, the tolerable range of the feedback delay τ d becomes narrow to keep the COM/COP displacements small.
A concrete conclusion has not been reached as to how the dual task influences information processing of higher brain functions [14]. The human information processing process depends on the task that was imposed on the subject. Therefore, as the dual task was imposed, both K f and τd changed in the simulation. The information processing process may change due instruction, the difficulty level of the task or individual differences. For this reason, previous reports on the standing task coupled with the dual task did not provide a comprehensive view for observational data analysis from a physiological viewpoint. The standing posture control model used in this study is simple but enables analysis of the influence of mental workload on standing posture control, and provides a comprehensive view of the observation results.
The Maurer-Peterka's model that was used in this study has been considered to adequately describe the standing task behaviour with consideration to the skeletal system of the leg and the central nervous system of the brain. If we use another model, such as the intermittent control model [20] with properly selected parameters, similar results will be obtained.
4 Measurement of Mental Workload Influence
4.1 Experimental method
In order to confirm the usefulness of the proposed model based mental workload influence analysis method, we developed a dual task based experimental method. Since the spinal accessory nerve provides motor innervation from the central nervous system, reflex movement may be change by the dual-task-based mental workload. In the experiments to investigate the mental workload on reflex movement, we imposed the dual-task-based mental workload on the subjects, and tried to measure the stretch reflex action and the long-latency reflex action through the muscle spindle as shown in Fig. 1. The experimental setup shown in Fig. 7 consists of an electromyography system, a 3D motion capture system (MAC 3D Motion Analysis Inc.), a treadmill system with servo motor control units, a weight-bearing system to make the experiment safe and PCs for data analysis. We applied a disturbance to move the supporting plane of the treadmill in Fig. 7 in the horizontal direction such that the displacement of the ankle joint induced a reflex movement. In order to measure the barycentric position of the subject, we put 34 markers with a diameter of 12[mm] on the feature points of the subject based on Dempster's method. We used the results obtained for the first 150 [msec] for analysis since voluntary movement is known to begin to appear at about 200 [msec] after the disturbance. Some evaluation indices such as centre of mass (COM) displacements, ankle joint angles, ankle moments and the myoelectric potentials of several muscles were introduced in order to investigate the influence of mental workload on reflex movement. It is indisputable that reflex movement is indirectly influenced by the central nervous system. However, a significant difference was not observed between the case of the single task and the case of the dual task. Therefore in this section, we focus on the influence of the mental workload on voluntary movement.
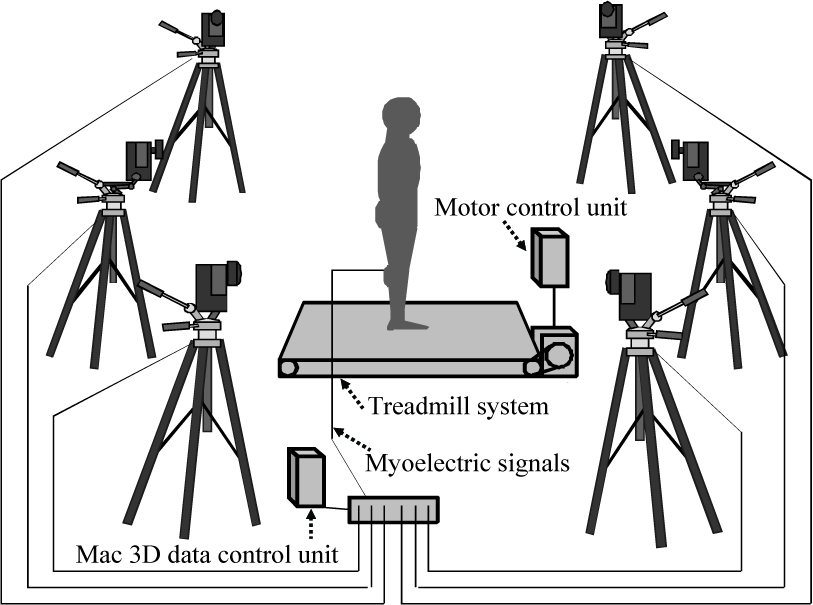
Environmental setup for measuring the influence of mental workload on reflex movement
In the field of cognitive neuroscience, two theories have been proposed to explain activities of the central nervous system. In the capacity theory, processing capacity of the central nervous system is limited and the mental workload is believed to be shared simultaneously by multiple tasks. If the required mental workload of a task is greater than the processing capacity in the central nervous system, the task performance will be degraded. In the bottleneck theory, multiple tasks are processed one after the other in a rigorous manner so that if two tasks are imposed simultaneously on the subject, it takes a longer time than in the case of either of the tasks imposed individually. Therefore if subjects are required to make a voluntary movement which brings about a mental workload, the influence of the dual task will affect the task performance.
In order to measure voluntary movement, we used the COP-based tracking task, where the subjects are asked to track the target in the monitor with the cursor. The cursor position is shown on the monitor in order that the subject may track the target by controlling his/her COP position. The COP position can be measured in real-time from the force plate installed on the supporting plane of the treadmill.
We investigate the influence of the dual task on control performance and processing time in this experiment. The experimental environment consists of a force plate, a display system, and a PC as in Fig. 8.
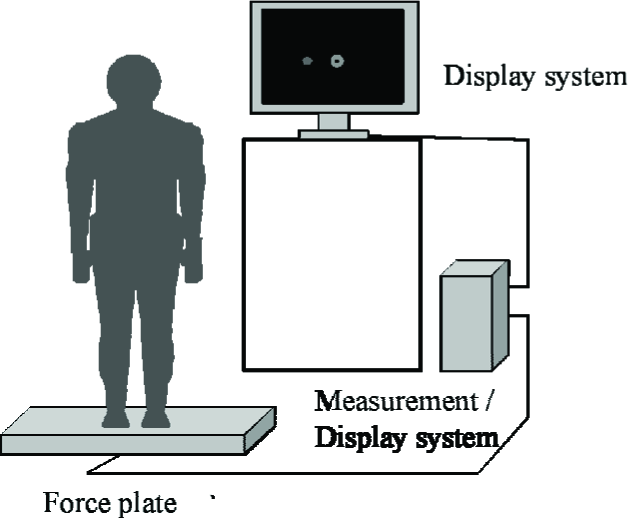
Experimental environment
White noise was used as the target signal that was filtered with the cutoff frequency of 0.4[Hz]. The cutoff frequency was selected based on the results of preliminary experiments. We show a display example in Fig. 8, where a ring on the right side and a round dot on the left side represent the cursor and the target, respectively. The cursor moves vertically for a vertical tracking task and horizontally for a horizontal tracking task.
The experimental procedure is summarized as follows:
Step 1: We setup the experimental environment of Fig. 8. The subjects are asked to stand in a natural posture with their arms straight down at their sides. The display is projected on the monitor 1.5 meters away from the subject at eye level.
Step 2: The experiment is explained to the subjects and they are asked to practice for a sufficient time.
Step 3: We calculate and record the subject's COP position during a 40 second experiment. The record for the last 30 seconds is filtered with the sampling frequency of 50 [Hz], and is used for the analysis.
Step 4: The subjects are asked to perform a “2 back” task or a “3 back” task. Based on a subjective view of the preliminary experimental results, we select the task level of the “n-back” task.
Step 5: The subjects are asked to perform simultaneously the COP-based tracking task and the one-digit number-based n-back task.
In the n-back task, the subject is presented with a sequence of stimuli, and is asked to say ‘yes’ if the current stimulus matches the one n step(s) earlier, and ‘no’ otherwise. In this study, vocal guidance was provided throughout the task at a regular interval of 1.5 [sec] for a one-digit number-based n-back. Here, n can be considered as a load factor, and based on the preliminary experiment we selected n from between 2 and 3 for each subject.
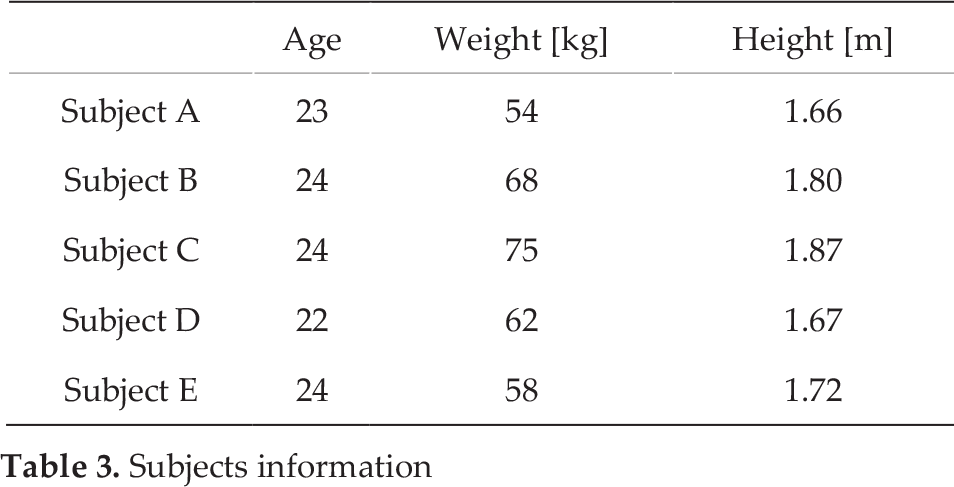
Five subjects joined the experiment as in Table 3.
Subjects information
4.2 Experimental results of the tracking task
We show the experimental results of the vertical tracking task and the horizontal tracking task in Fig. 9 and Fig. 10, respectively. In the first and the second graphs of Fig. 9 and Fig. 10, the thin lines and thick lines represent the target signals and the measured signals, respectively, and the grey area represents the standard deviation of the measured values. The first graphs of Fig. 9 and Fig. 10 are the results of the single task, and the second graphs are the results of the dual task. As we see in all graphs, the difference between the reference signal and the measured signal had a similar tendency during the experiments in both single and dual tasks. However we did not use the signals during the first 10 seconds for analysis, since they contained transient behaviour.

Vertical tracking task result

Horizontal tracking task result
4.3 Evaluation of the tracking task results
Next, we calculated the value of the root mean square error (RMSE) as follows:


Here, θ1 and θ2 are the time series data sets of the target signals and the measured signals, respectively, and x represents each element of the data set. The average values of the RMSEs and the standard deviations of COP-based tracking tasks are shown in Fig. 11, and Fig. 12, respectively.

RMSE of vertical tracking task

RMSE of horizontal tracking task
When the individual difference is extremely large as in the physiological response, there is a possibility that the population may deviate from normal distribution. Therefore, the Wilcoxon rank-sum test, one of the non-parametric tests was used to show a significant difference. The Wilcoxon rank-sum test tests the null hypothesis that two populations have equally large distributions. The experimental results show that the dual task has greater RMSE values in both the vertical and horizontal tracking tasks at a 1% higher significance level than the single task.
4.4 Phase-lag-based evaluation
We focus on the phase lag between the target signal and the measured signal of the COP position. The subject acquires the target signal made with white noise as the visual feedback during the tracking task, compares both the target signal and the measured signal, controls his/her motor system to track the target signal and as the result the cursor in the monitor moves. Therefore a phase lag is generated between both signals.
In order to investigate the phase lag, we used a cross correlation function defined as follows.

Here, f(t) and g(t) are periodic functions to evaluate with the sampling interval of T. The inner product between f(t) and g(t) implies the strength of the cross correlation. The phase difference θ is obtained when the cross correlation function is maximized. Since we are interested in period characteristics, we normalized both signals before calculating the cross-correlation function. We show the phase differences (lags) and their standard deviations in the vertical and horizontal tracking tasks in Fig. 13 and Fig. 14, respectively. The Wilcoxon rank-sum test results show that the dual task has a greater phase lag in both the vertical and horizontal tracking tasks at a 5% higher significance level than the single task.

Phase lag in the vertical tracking task

Phase lag in the horizontal tracking task
4.5 Discussions
It has been shown from statistical test results that tracking error and phase lag were bigger when we used the dual task than when we used the single task. The reason why the subjects did not perfectly track the target signal in Fig. 9 and Fig. 10 is considered in the following. The COP includes small oscillations whose frequency is higher than the reference signal as in Fig. 9 and Fig. 10 and also the phase lag can be generated by the oscillation as in the simulation result of Fig. 4. It is difficult to perfectly eliminate the COP oscillation since the human body uses agonist muscles and antagonist muscles for the control of each joint in the body and this small oscillation is one of the intrinsic features of the human neuro-muscular-skeletal system. However, the oscillation becomes violent when the cursor of COP moves faster than the target moves, and also when the cursor speed is lower than the target speed by a large margin and the subjects try to catch up with it. Therefore, the amplitude of the COP oscillation during the dual task was bigger in Fig. 9 and Fig. 10 than the amplitude of COP oscillation during the single task.
For the same reason, the RMSE value during the dual task was bigger than the RMSE value during the single task. This means the subject could not generate the proper commands for his/her motor control system to move the COP, after perceiving the movement of the target. It takes about 0.2 [sec] to move their bodies voluntarily after making a decision on the acquired environmental information. Therefore about 0.2 [sec] phase lag is necessarily required regardless of whether the dual task was used or not in Fig. 13 and Fig. 14. The statistical test results show that it takes a longer phase lag to make a significant difference between the dual task and the single task.
Since the cursor signal does not perfectly coincide with the target signal, the time lag corresponding to the phase lag does not represent exactly the information processing time taken by the central nervous system, but the phase lag can be used as an evaluation index of the mental workload of the central nervous system. The experimental results show that when the dual task is used, it takes longer to perceive the COP, to generate motor control commands for tracking the target signal and to transfer them to the muscular-skeletal system. Therefore it has been clear from the experimental results that the dual task influences voluntary standing posture control, but it is still insufficient to determine whether the capacity theory or the bottleneck theory is correct.
When we actually estimate the mental workload of a given subject who is conducting a certain task, we need to understand the relationship between the feedback gain Kf, the feedback delay τd and the displacements of an observational variable such as the COM/COP displacements. The observational variable should change smoothly as the difficulty level of the n-back task that is used as part of the dual task in this study is increased. If the observational variable diverges, it causes the main task such as the COM/COP tracking task, to be performed badly. The original goal of mental workload estimation is to maintain main task performance by letting the subject to know his or her own mental state, while the main task performance is not severely disturbed. In this study, we proposed a mental workload estimation method based on a human body model that describes the features of the central nervous system, the skeletal system and the physiological system of the body. By analysing the root mean square errors and the phase lags of COM/COP signals, we can estimate the mental workload of the subject based on the relationship of Kf, τd, and the standard deviation of COM/COP displacements. After the relationship is constructed as in Fig. 5 or Fig. 6, we don't need to apply an n-back task in the actual man-machine interfaces. When we impose the main task on the subject, the subject's information processing resources or the processing capacity of the central nervous system will be reduced from tiredness, drowsiness and so on, as the task time elapses.
5. Conclusions
In this paper, we have presented a model-based analysis method of the standing posture control mechanism with consideration given to mental workload and the physiological features of sensory feedback. The influence of mental workload on reflex movement is difficult to observe through the measurement of COM displacements, ankle joint angles, ankle moments, and the myoelectric potentials of various muscles. Therefore, we investigated the influence of mental workload on voluntary movement. In the developed COP/COM-based tracking task, subjects were asked to track a target signal produced by white noise within a certain bandwidth. Significant differences were found, using the Wilcoxon rank-sum test, in RMSE and phase lag of the tracking performance of the COM and the COP, between the results obtained for a single task and a dual task. However, this does not mean that the tracking performance of the COM and the COP has a direct relation to mental workload, or that tracking performance can be used as a measure for the evaluation of mental workload. In the literature some approaches have been reported to evaluate the influence of mental workload. The authors of [29] developed a model that describes a driver's physiological behaviour in the vestibule-ocular reflex and the optokinetic reflex and proposed an evaluation function of mental workload based on the coherence between the model output and the measured value. As in this paper, physiological features should be analysed for the evaluation of mental workload. The estimation of mental workload, based on the construction of the human body model which describes physiological and skeletal features of human bodies, is significantly important since this approach can be applied to the estimation of mental workload in various man-machine systems, coupled with proper identification methods with consideration given to the physiological features of a sensory feedback system. The RMSE and phase lag of the standing task performance are physiologically related to the feedback gain and the feedback delay of the sensory system, respectively. Although we cannot directly measure the feedback delay and the feedback gain of the human sensory system, the RMSE and phase lag of the standing task performance can be used as measures of the feedback gain Kf and the feedback delay τd. Based on the relationship between the feedback gain Kf, the feedback delay τd, and the displacement of an observational variable such as the COP/COM displacements, the proposed method can be applied to estimate the mental workload of a subject who is conducting a certain task. Future work includes the application of the developed model-based scheme to lower-limb disabled patients to analyse the relation between mental workload and reference trajectory tracking efforts.
Footnotes
6. Appendix
In order to investigate the influence of mental workload during reflex movement, we experimented as follows:
The reason why the records for the first five disturbances were discarded is that in the preliminary experiment, subjects were adapting to the experimental environment and the reflex movements to the disturbance converged from about the fifth disturbance. The sampling frequencies of the motion signals and the myoelectric signals are 100 [Hz] and 1000[Hz], respectively. Disturbances were applied in the forward, backward, leftward and rightward directions as Fig A.
We compute the centre of mass (COM), ankle angle, head angle, ankle joint moment. Fig. B shows the angle of ankle joint. We use the angle of the ankle joint that is not the anatomical angle but the one when the static standing posture is represented by a single inverted pendulum model.
It is not easy to directly measure the ankle joint moment. We calculate the torque that is considered to act on the supporting point of the standing posture in the inverted pendulum model as follows:
Here, I is the inertia moment of the inverted pendulum, θ is the rotating angle, m is the mass of the inverted pendulum, g is gravitational acceleration and M is the moment acting on the support point. Since I, m, g, and θ are measured in the experiment, M can be calculated as follows.
We found these significant differences in standing posture control between the dual task and the single task: the anterior tibial muscle when disturbance was applied in the forward direction; head angle, head angle with respect to body trunk and anterior tibial muscle when disturbance was applied in the leftward direction. In the figures, thick lines show the results of the dual task, and thin lines show the results of the single task.
The myoelectric potential of the anterior tibial muscle during a standing task had a peak value of 200 [mV] around 250 [msec] to 300 [msec] after the disturbance was applied, but had no peak value during the dual task. However the myoelectric potential that was measured during the latent time is not reflex movement but voluntary movement. This is also explained from the fact that no general tendency was found since it had a large standard deviation of 300 [mV] for the average value of 200 [mV].
When the disturbance was applied in the leftward direction, the head angle during the dual task had a bigger variation than during the standing task, about 300 [msec] to 500 [msec] after the disturbance was applied. Although the angular variation during the dual task was big, a general tendency was not found since the difference between the dual task and the single task was only 1 or 2 [degree(s)]. In a similar way, the influence of the dual task on reflex movement was not found in the head angle with respect to the body trunk or the anterior tibial muscle when the disturbance was applied in the leftward direction.
As observed above, the influence of information processing load by the dual task was not found in reflex movement during standing posture control. It is indisputable that reflex movement is indirectly influenced by the central nervous system. As we see from the experimental results however, the information processing load is not so much that it influences the performance in standing posture control.