
Abstract
this paper proposes a new method for designing a reconfigurable controller for descriptor systems which is obtained from the second order dynamics of a robot control situation. Using mathematical tools the equations of robot control situation have been translated to descriptor systems, thus, after this change the controller has been designed for control performances. The proposed reconfigurable controller can recover the nominal closed-loop performances after fault occurrence in the system. The dynamics of descriptor systems contain infinite and finite elements, so a complete response of descriptor systems can be represented by an eigenstructure which involves finite and infinite elements. In this paper eigenstructure assignment is used to design a reconfigurable controller in general such that the reconfigured system can recover the complete response of a nominal system as much as possible. Finally, an example represents the effectiveness of the new method.
1. Introduction
Reconfigurable control system is a system that is capable of dealing with large variations in the system being controlled by means of adjusting or modifying the nominal control law. The stability and performance of the original closed-loop system is maintained as much as possible using the reconfigurable control systems. The reconfigurable control law must provide stability and excellent performance under conditions of failure and damage, as well as during normal operation [1]. In recent years, reconfigurable control has attracted much research attention and many new approaches have been proposed. In [2], the linear quadratic regulator method has been considered. In addition [2], pseudo inverse method [3], feedback linearization[4], the Lyapunov method [5], sliding mode control [6] are all considered, in [10] a reconfigurable controller design via output feedback in the case of post order fault is represented. [11] considers a modified approach that guarantees the stability of the closed-loop system by using an appropriate Lyapunov equation – all examples of approaches for designing reconfigurable control.
The eigenstructure assignment is one of the most powerful tools for control systems. According to the fact that the response of the system can be stated based on eigenvalues and corresponding eigenvectors, in this paper the eigenstructure assignment method is considered.
We know that the second order dynamic system is one of the most important systems in the dynamics of robot manipulators [12]. It is well known that these systems can be translated as descriptor systems by changes in variables. Designing a reconfigurable controller in these systems is important because fault occurrence in these systems may disturb the appropriate performances. Designing a reconfigurable controller in a descriptor system and high order dynamics system has been considered in some research. In [7], designing a reconfigurable controller in a second order dynamic system via p-d feedback eigenstructure assignment is considered. By changing variables in the second order system, this system is translated to a descriptor system. Based on finite eigenvalues and corresponding eigenvectors, the reconfigurable system has been designed. However, we know that the complete response of the descriptor system [8] consists of finite and infinite eigenstructures. So this method does not give any information about infinite eigenstructures.
The major contribution of this paper is to develop using eigenstructure assignment in second order dynamic systems in general case. In the proposed method there isn't any constraint on eigenvalues and eigenvectors of system, while in the previous work [7] eigenvalues are distinct. The proposed method can be used for descriptor systems which are important in network and other systems. According to the fact that the complete response of descriptor systems involves finite eigenstructure and infinite eigenstructure, the proposed method considers both finite eigenstructure and infinite eigenstructure. In this paper, a new method is suggested for the design of a reconfigurable controller in descriptor systems using finite and infinite eigenstructure assignment. Based on parametric eigenstructure assignment by state feedback in the descriptor system [9], the reconfigurable controller is designed.
This paper is organized as follows: Section 2 describes the parametric approach. In section3 the main problem is represented. Section 4 demonstrates the effectiveness of the proposed method.
2. Parametric Eigenstructure Assignment
Consider the second order dynamic system

Where q ∈ Rn1 and u ∈ Rr1 are state and input vectors respectively. Suppose that rank(E1) = n1, rank (B1) = r1. Consider the following transformation

By applying the above transformation the following descriptor system is obtained
Where x ∈ Rn, u ∈ Rr, n = 2n1, r = 2r1, are respectively state vector and control vector E, A,B and C are the real matrices with appropriate dimensions, such that the closed-loop finite eigenvalues λ i and (i = 1,…,m'), infinite eigenvalues and corresponding eigenvectors are designed to satisfy the special control specifications. Note that the closed system (E, A + BK) is regular, i.e., DET(sE- A – BK) is not identically zero [9] where rank (E) = m ≥ n, rank (B) = r, also suppose that, (1) is controllable, i.e., rank = [sE-A B] = n for all s ∈ C.
Assume the following state feedback which is design to satisfy special performances

Suppose that due to the fault occurrence in the system, the dynamics of the nominal system (3) is changed. The new model of the faulty system is described as follows

Where Af, Ef, Bf are real matrices with appropriate dimension and xf ∈ Rn, uf ∈ Rr, yf ∈ Rp, also rank(Ef) = m ≤ n, rank(Bf) = r and the faulty system is controllable. Our objective is to design a new state feedback

such that the performances of the nominal system are recovered. The closed-loop system is given by

In order to solve this problem, first we describe the parametric eigenstructure assignment by state feedback which is presented in [9].
Let θ = {λ1f, λ2f,…λmf}, where θ is the set of finite eigenvalues of the closed-loop system (Ef, Af + BfKf). The eigenvalue λif has the algebraic multiplicity mi and a geometric multiplicity qi. The Jordan canonical form Jf of (Ef, Af + BfKf) has

Also m1 + m2 +… mm' = m according to definition of eigenvalues and eigenvector in descriptor system, the following equations are satisfied

Where gijk and λif are eigenvalue and corresponding eigenvector of faulty system. Based on [9], (9) can be written as

Where
By applying singular value decomposition to the matrix [Af – λif Ef Bf], the following equation is obtained

Where Pf (λif) ∈ Cn*n and Qf (λif) ∈ C(n+r)*(n+r) are orthogonal matrices, and ψf (λif) is a non singular diagonal matrix, such that the diagonal elements are singular values of [Af – λifEf Bf]. The parametric form of eigenstructure assignment is

k = 1,2,… pij, j = 1,2,…qi, i = 1,2,‥m'
Where hijk ∈ Cr are parameter vectors and Nkf (λif), Dkf (λif) are obtained as follows

Assume that the infinite eigenvalue of (Ef, Af + BfKf) is shown by λ∞f, so
According to definition of eigenstructure assignment, we have

Note that the algebraic and geometric multiplicities are n – m. Corresponding eigenvector of S∞ is g∞j. Consider

Based on the results of [9], the parametric infinite eigenvector is

Where N∞f, D∞f are obtained from the following equations

Define the matrix G∞f = [g∞1, g∞2, …,g∞n-m] and M∞ = [m∞1, m∞2,…,m∞n-m]

Similar to (10), we have

By combining (10) and (20) the following equation is obtained

If det[VfV∞] ≠ O then Kf is obtained as follows

In order to calculate the matrix Kf, the following constraints must be satisfied
giji ∈ Rr for real eigenvalue λif, whereas gijk = ḡijk ∈ Cr for complex conjugate of eigenvalues λif, λif = λ̄if det[G G∞] ≠ 0 det [F∞h∞1F∞h∞2…F∞h∞2] ≠ 0, F∞ = (T∞f)T AfN∞ + (T∞f)T BfD∞f
Where T∞f is the left eigenvector matrix of the closed-loop system associated with the finite closed-loop eigenvalue s∞.

3. Main problem
Based on [8], the closed-loop response of descriptor systems (1) using state feedback and in terms of eigenstructure assignment can be stated as follows

Where Tf and T∞f are left eigenvector matrices of the closed-loop system associated with the finite closed-loop eigenvalues λif and left eigenvector matrices of the closed-loop system associated with the finite closed-loop eigenvalue s∞f respectively, such that

The complete response of closed-loop system can be rewritten as follows

Clearly, this response consists of two parts, the finite part Xfmf that related to finite eigenstructure and the infinite part Xinff related to infinite eigenstructures.
According to the above discussions, similarly the closed-loop response of the nominal system contains two parts Xinf, Xfin. Based on (24) and (26), it is clear that the response of the system is related to its eigenstructure, so in order to recover nominal performance, the state feedback controller Kf must be designed such that the behaviour of the faulty system with this controller is closed to nominal system much as possible. The reconfiguration objective can be translated to the following equations

Where λ
i
is eigenvalue of the nominal system and vijk is corresponding eigenvector. By substituting the parametric form of gijk and gj∞ from (12) and (17), the above equations change to

Where vijk are eigenvectors of closed-loop of nominal system. Note that the parametric form of vijk obtains similar to gijk. In order to solve the above problem, taking gradient with respect to hijk, h
j
∞ and then set to zero we have
In order to describe the method, consider k = 2 so the J fjn is stated as follows

According to (30)

Taking the above gradient and then by simplifying the results, we have

h
ij
1, h
ij
2 can be calculated from the above equations. In the special case of distinct finite eigenvalues (mi = qi = 1, i = 1,2,m), Kf can be calculated as follows

The parametric eigenstructure of distinct eigenvalues is computed as

By substituting (35) in (28) and then take gradient the solution is obtained as

Where Vi11 is eigenvector of faulty system in distinct case.
One of the most important specifications that should be recovered by the reconfigured system is steady state response of the nominal systems. The following theorem states how a feedforward matrix should be designed to minimize the difference between the after fault and prefault steady state response
Theorem1: For the faulty system (5), consider the control law

Where L ∈ Rm×m is feedforward matrix. The steady state response of the nominal system to step input can be recovered if R is selected as
Where

Proof: The closed-loop systems of nominal and faulty systems are given by


By applying Laplace transformation to (40) and (41), we have


In the above equation suppose that (E, A + BK) and (Ef, Af + BfKf) are regular. The steady state output of the nominal closed-loop system to a unit step input is given by

In addition, for the faulty system

So for recovering of the steady state response of the nominal system we have to design L such that

The solution is described in (38).
4. Example
Consider the following fifth order descriptor [9]
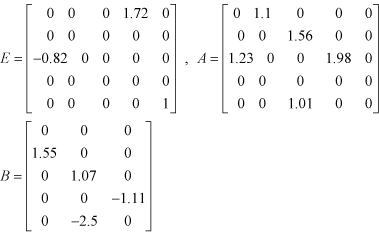
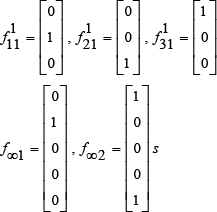
According to [9], considering the assignment of the following closed-loop eigenstructure

So the corresponding parameters are as follows

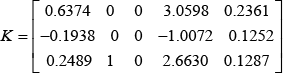
The above parameter is computed based on (36). Suppose that in a special case the free parameters are computed as follows
Then the controller is
Consider due to the fault the dynamics of the system are changed as follows

According to the proposed method in this work the reconfigured controller is obtained as follows. The following controller is computed based on (…14)

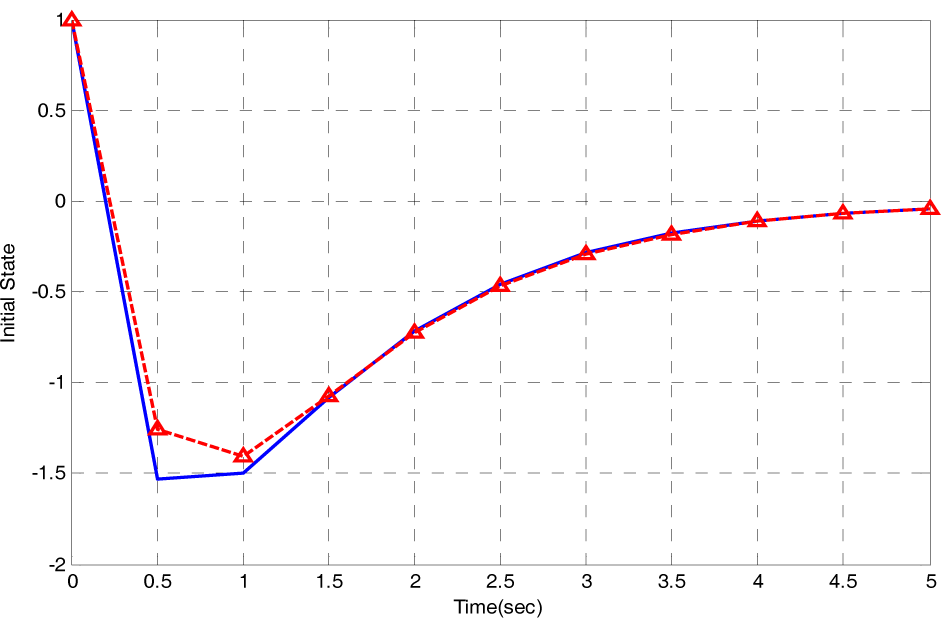
Because the eigenvalues are distinct, Kf is computed based on 34). So we can simulate the response of this system to the initial conditions x(0) = [1 1 0.9 1 0.9] T as follows

Response of first state

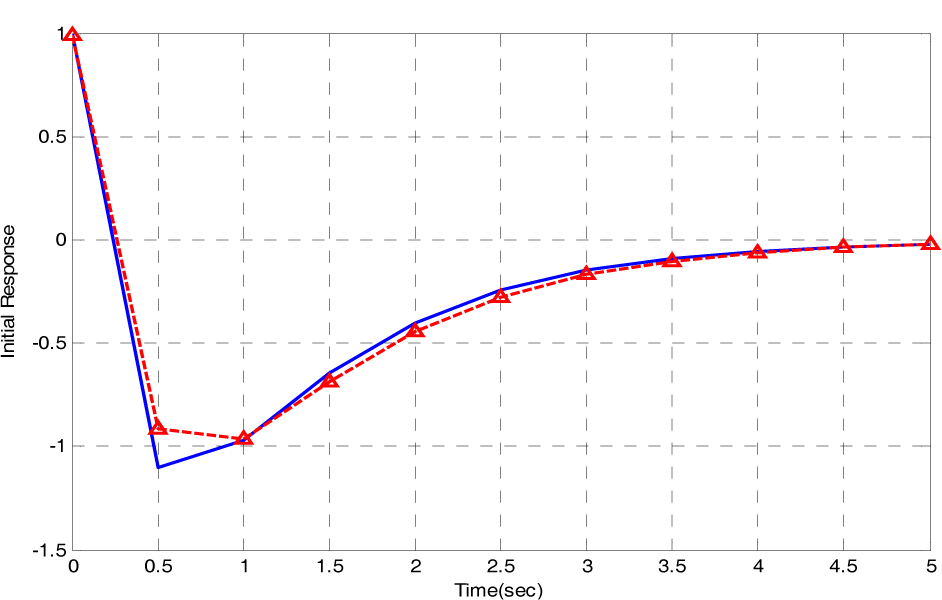
Response of second state
Response of third state

Response of fourth state
Response of fifth state
In these pictures dashed lines relate to the reconfigured system, which is simulated by using the proposed controller Kf, and the solid lines relate to the nominal system. From the above figures it can be seen that the proposed reconfigurable control system can recover the nominal system response.
5. Conclusion
An eigenstructure assignment-based method is suggested to design a reconfigurable controller for descriptor systems via state feedback. The controller can be reconfigured to compensate for the effect of change in the system dynamics. This work deals with the control reconfiguration in the general case where the complete response of systems includes the infinite and finite eigenstructure. Finally, an example demonstrates the effectiveness of the proposed method via simulation.