
Abstract
This paper proposes a high gain disturbance observer based control approach for nonlinear systems. Compared with previous works, it can admit a much larger class of disturbances produced by nonlinear exo-systems. Our approach will follow the framework of the two-stage design procedure, which separates the disturbance observer design from the controller design. Under certain conditions, the observer error for the disturbances generated by nonlinear exo-systems globally and asymptotically converges on zero and the stability of the closed-loop system is guaranteed. An illustrative example of a two-link robot manipulator with limit cycles disturbance is presented to show the effectiveness of the proposed method.
1. Introduction
In practice, an external disturbance always exists in a control system. As an efficient tool for high-precision and high-speed motion control applications, the disturbance observer-based control (DOBC) approach has been widely employed in industry and, in particular, in mechatronics [1-4].
As distinct from considering the control problem for a nonlinear system under disturbances as a single issue, such as is the case with the framework of output regulation [5, 6] or H∞ design [7], a flexible two-stage design procedure is proposed in the disturbance observer-based control approach which separates the disturbance observer design from the controller design [8]. The successful application of the framework relies on the satisfaction of two key conditions. The first one is that an observer that can estimate the disturbance in a convergence in some sense must be established, while the second one is that the stability of the closed-loop system composed of the plant, the disturbance observer and the nonlinear controller, can be guaranteed.
The theoretical study of the disturbance observer has attracted much attention over the last two decades. Based on variable structure system theory, a disturbance observer for minimum-phase dynamic systems with arbitrary degrees of freedom has been proposed in [9]. The upper and lower bounds of the disturbances are supposed to be known and the stability of the combined controller-observer system is not guaranteed. A new design framework for nonlinear observers capable of offering reliable concurrent estimates of the process state variables, along with key unknown process or sensor disturbances, was developed in [10, 11]. In particular, when the disturbance is generated from linear exo-systems, the disturbance observer-based control approach for nonlinear systems has been thoroughly addressed in [12-15]. Nevertheless, the majority of external disturbances may be generated by nonlinear systems in practice. The research studying such nonlinear exo-systems is interesting, since a nonlinear system can generate a much larger class of exogenous signals than a can a linear system. For example, the limit cycles frequently encountered in many engineering areas – such as aircraft wing fluttering, the hopping motion of a legged robot and that generated in mathematical expression by the well-known Van der Pol oscillator – cannot be produced by any linear system. Perhaps this is also the reason for why the extension from linear exo-systems to nonlinear exo-systems is being extensively studied under the nonlinear robust output regulation problem in recent years [16-18]. Unfortunately, and unlike linear exo-systems, when it comes to nonlinear exo-systems under the output regulation problem, it might be difficult to ascertain the availability of the solution as a set of nonlinear partial differential equations – called regulator equations – and, indeed, the conditions for finding such a solution are not clear at present [17, 18]. Thus, the interest of making the exo-systems nonlinear is self-explanatory in employing the disturbance observer-based control approach for nonlinear systems.
The work in this paper is interesting in comparison with the existing work in three respects. First, this paper aims to focus on the much more general case where the exo-systems are nonlinear. Nevertheless, such work with the nonlinear exo-systems is much more challenging. The nonlinear exogenous system is supposed to be uniformly observable, which can be transformed into a canonical form with a nonlinear part satisfying the Lipschitz condition. Thus, under some conditions, the global asymptotic convergence analysis of the proposed disturbance observer is established. Second, by incorporating a high gain technique [19], the external disturbance generated by nonlinear exo-systems is allowed with an unknown bound. Thus, the research results in the paper can be much more extensive and applicable. Third, the global stability property of the closed-loop system is investigated too.
2. Problem formulation
Consider a nonlinear affine system described by:

where x ∈ Rn is the state vector, u ∈ Rq is the input, y ∈ R is the output and d ∈ R represents the external disturbance generated by the following nonlinear exo-system:

where w ∈ Rm.
It is assumed that all the functions in systems (1) and (2) are sufficiently smooth for their arguments. The relative degree [20] from the disturbance to the output of system (1) is uniformly defined as r, i.e. Lg2Lifh(x) = 0, i=1, 2, …, r-2 and Lg2L
f
r–1h(x) ≠ 0 for all x. Without loss of generality, suppose that Lg2L
f
r–1h(x) and that it can be divided as:

where a0 > 0 is a constant defined as the minimum of the function over all x and a1(x) > 0 for all x.
In what follows, we will consider the problem described as follows: for a given w ∈ Rm, fund a composite nonlinear controller for system (1) by employing the disturbance observer-based control technique such that, for all w ∈ W, and for any initial conditions of the controlled system and the composite nonlinear controller, the solution of the closed-loop system exists and is bounded for all t ≥ 0 and, furthermore,
To state our problem best, we further assume that the nonlinear exo-system (2) is uniformly observable, the solution of which, starting from any initial state w(0), exists for all t ≥ 0 and is globally bounded.
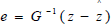
The nonlinear exogenous system (2) is uniformly observable if an invertible map z = φ(w) exists, with φ: Rm → Rm, mapping system (2) into [21, 22]:

where:

A composite controller obtained by employing the disturbance observer-based control technique can be constructed by applying the following three step design procedure, which we rephrase from [8] as follows.
Step 1: Find an ideal (non)linear controller for system (1) to achieve some performance specifications given the assumption that the disturbance is measurable, or even that there is no disturbance.
Step 2: Design the disturbance observer to estimate the disturbance in some convergence sense.
Step 3: Replace the disturbance in the ideal controller of the first step with its estimation, yielded by the disturbance observer of the second step to obtain the actual controller. Prove that the composite controller composed of the disturbance observer and the actual controller can achieve the control objective of the given plant (1) with exo-system (2).
The above proposed procedure consists of two-stages. In the first stage, an ideal controller is considered. In the second stage, the disturbance observer is designed and then integrated with the actual controller. The problem for step 1 has been well-studied in several researches [23, 24]. Here, we will focus on the next two steps. We first consider the establishment of the disturbance observer for the nonlinear exo-system (2) by introducing the high gain technique.
3. Disturbance observer design
To estimate the unknown disturbance d, we first suggest a basic disturbance observer for system (1) with nonlinear exo-system (2):
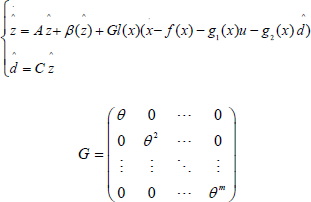
where l(x) is the nonlinear gain function of the observer and θ > 0.
However, since the derivative of the state in the system exists (5), the disturbance observer cannot be implemented in practice. By analogy of the approach in [13], let us set ẑ = γ + p(x) and substitute it into (5), then we can have:

Let:

If we combine (6) and (7), then a new disturbance observer can be described by:

This can be realized in practice.
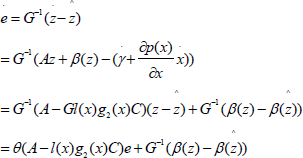
e is the estimation error, defined as follows:
Now, the disturbance observer error dynamics can be calculated as:
If the nonlinear variable p(x) is chosen as:

where K' = [k1, k2, ···, km]
T
are gains to be determined later, then it can be calculated from (7) that the observer gain function l(x) is determined by:

Thus, the substitution of (3) and (12) into the disturbance observer error dynamics (10) yields:
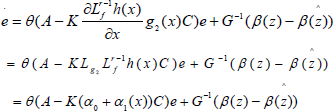

where:

is strictly positive real.
Proof: let δβ = G−1(β(z) – β(ẑ)), δβi be the ith of δβ, then we can get:

where ε is the locally Lipschitz constant. If we let θ > 1, then (16) can be described as:

According to the Kalman-Yakubovich Lemma, the transfer function (14) is strictly positive real, which implies that there exists a positive definite matrix P satisfying 0 < μmin I ≤ P ≤ μmax I, such that:

and:

Choose a Lyapunov candidate for the observer error dynamics (13):

As such, it can be seen that the derivative of the above Lyapunov function candidate along the trajectory of the observer error dynamics (13) is:

Substituting (17), (18) and (19) into (21), yields:

where μ is some positive constant subject to (18). It is also known from (3) that a1(x) > 0 and θ > 0 irrespective of the state variable x. This implies that θeTCTCe ≥ 0, thus (22) becomes:

if θ satisfies:

Note that V0 is positive definite and V0 (e) is negative semi-definite by (24). According to Barbalat's lemma, we can conclude that
Substituting (15) and (19) into (18) yields:

If a positive definite matrix P exists satisfying the above linear matrix inequality (LMI), then K and K' can be determined by:


4. Composite controller
Having designed the disturbance observer (8) for the nonlinear affine systems (1) with the nonlinear exo-systems (2), we only need to consider the problem of a separately designed controller for system (1). From this, if the disturbance in this designed controller is replaced by its estimation yielded by the disturbance observer, the stability of the whole closed-loop system composed of the controlled plant, the disturbance observer and the controller, can be guaranteed. For this purpose, let us first list the following assumptions.
where a1, a2, a3 and a4 are some positive real constants.

where a5 is some positive real constant.
Now we are ready to establish the following theorem.
a control law can be designed to globally exponentially stabilize the nonlinear affine system (1) without the disturbances;
a disturbance observer can be obtained, as in Section 3, with the chosen design function p(x) defined in (11) and a gain function K determined in (23);
then there exists a composite controller such that the closed-loop system composed of the nonlinear system (1), the nonlinear exo-system (2) and the composite controller, is globally asymptotically stabilized, in the sense that for any initial condition of the closed-loop system, the solution exists and is bounded for all t ≥ 0 and, furthermore,

globally exponentially stabilizing the system without the disturbances.
Next, we consider the designed stabilizing controller for the case when system (1) is with disturbances, such that:

where π(x) is a nonlinear function and Ĉ is governed by the dynamic (8) and is the estimation of the disturbance d generated by the exo-system (2).
Substituting the controller (30) into system (1), we can obtain:

Thus, if there exists π(x) satisfying g1(x)π(x) =–g2(x), then the whole closed-loop system will reduce to:

Choose the Lyapunov function candidate for system (32) as:

where ρ is a positive constant to be determined later, then the derivative of Vc(x, e) along the trajectory of system (32) can be calculated as follows:

Since g2 is norm-bounded by Assumption 4.2, substituting (28) into (34) leads to:

Thus, if we let the positive constant ρ be such that:

then:

where δ is a positive real constant.
Note that Vc(x, e) is positive definite by (33) and Vc(x, e) is negative semi-definite by (37). Thus, x and e are bounded. Since both the disturbances generated by the nonlinear exo-system (2) and the invertible map of the disturbances z are bounded, from (6) and (8) we can conclude the boundedness of ẑ and γ. Thus, all the states as well as the derivatives of the closed-loop systems are bounded. Furthermore, by (37), x and e are square integrable over [0, +∞). Thus, by Barbalat's lemma, we have
5. An example
In this section, we apply the proposed high gain disturbance observer-based control design to a two-link robot manipulator subject to the disturbances generated by a nonlinear exo-system. The dynamics of a two-link robot manipulator (see Figure 1) in general can be described as [28]:
Two-link robot manipulator

where:

The objective is to design a controller τ such that under the disturbance τ
d
generated by an external exo-system, the variable q can be globally and asymptotically stabilized to some desired position. First, we design a controller for the two-link robot manipulator without disturbances using the PD computed-torque control (CTC) law [28], given as:

Where qd = [qd1 qd2] is the desired position of the manipulator, e = qd – q is the tracking error, Kp = diag(kp1, kp2) and Kv = diag(kv1, kv2) are the feedback gains with kp1 = kp2 = 50 and kv1 = kv2 = 10.
The PD computed-torque control law can globally exponentially stabilize the variable q of system (38) to its desired trajectory qd without disturbance. In fact, the robot manipulator under the CTC controller can be described as:
where q̄ = [q1, q2, q3, q4]T, q3 and q4, respectively, are the velocity of robot link 1 and link 2.
It can be seen that the equilibrium point of system (40) is (0, 0, qd1, qd2)T. Applying the coordinate transformation x1 = q1 – qd1, x2 = q2 – qd2, x3 = q3 and x4 = q4 to system (40) leads to:
where x = (x1, x2, x3, x4)T.
For system (41), it can be calculated that the eigenvalues are all are in the left half plane. Thus, system (41) without disturbances can be globally exponentially stabilized at its equilibrium in the origin and Assumption 4.1 is satisfied. Assume that there is only reaction torque from the object/environment acting on the tip of the second link in the operation-i.e., τ
d
– is given as:


Now, we need to design a disturbance observer for the above nonlinear exo-system. For this purpose, choose the invertible map z = φ(w) as:

Next, system (43) can be transformed into the form of (4) with:

Since the pair (A, C) is observable, system (43) is uniformly observable. It can also be noted that, for any initial states w1(0) and w2(0), the solution of the Van der Pol system globally exists and is bounded, and that β(z) satisfies the local Lipschitz condition. Thus, Assumption 2.1 is also satisfied. Following the design procedure given by Section 3, we can now design a high gain disturbance observer for the robot manipulator. The nonlinear variable p(x) can be chosen as:

and it can also be calculated that:

Thus
Choosing θ = 2, and from (18), (19) and (26), we can get:

The performance of the composite controller is verified with the initial conditions of the robot manipulator, the disturbance and the observer, being:
respectively.
Figure 2 and Figure 3 show the estimation performance of the disturbance observer for the nonlinear exo-system. It can be seen that the observer gives a satisfactory performance. Figure 4 and Figure 5, respectively, give us the comparison performance of the controller with and without the disturbance observer.
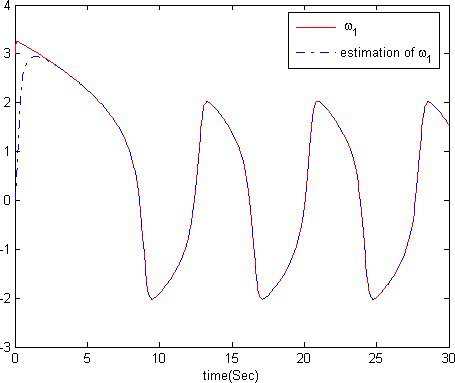
Estimation of w1
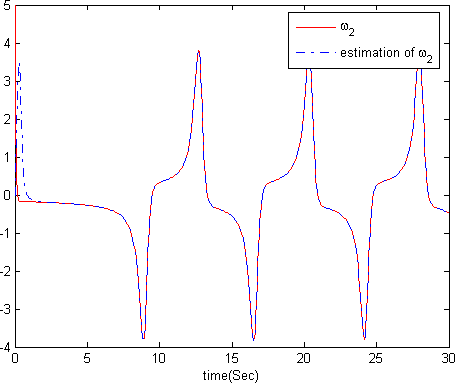
Estimation of w2
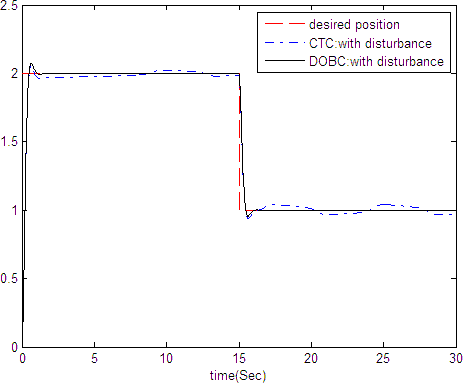
Performance of the high gain disturbance observer-based control for link 1

Performance of the high gain disturbance observer-based control for link 2
6. Conclusion
In this paper, we have described a high gain disturbance observer-based control for a class of nonlinear affine systems with nonlinear exo-systems. A set of sufficient conditions is established for the solvability of the problem; thus, the results can allow the disturbance observer-based control technique to admit a much larger class of exogenous disturbance signals. Our proposed approach has also been successfully applied to the disturbance rejection problem for a two-link robot manipulator.
Footnotes
7. Acknowledgments
This work is supported by the National Natural Science Foundation of China (Grant no. 61174098) and the Fundamental Research Funds for the Central Universities, SCUT X2zdD2117030 and SCUT 2012ZZ0110.