
Abstract
The main goal of this manuscript is to present a simplification of the Euler-Lagrange methodology, which allows us to simplify the obtaining of dynamic model of a robot using the intrinsic properties of dynamic model, which allows to reduce the computation time when the model is programmed. Using the
1. Introduction
Obtaining the dynamic model of a robot manipulator plays an important role in the description of the system behavior for specific stimulus; this representation will allows us describing the system movement, analyzing diverse configurations of a manipulator and designing control structures [1–4]. Describing the manipulator motion allows testing control strategies and motion planning techniques without the need to use a physically available system [5–7]. The dynamic model analysis could be helpful for mechanical design of prototypes. Registering the forces and required torques to generate movement of the robot, provides information which serves to select drivers and actuators [6]. A robot manipulator is basically a positioning device. For controlling the position we must know the dynamic properties from the manipulator in order to know how much force has to be exerted on it causing the movement [1]. Minimum force and the manipulator will be slow to react. Maximum force and the arm may crash with an object or may oscillate about its desire position. Deriving the dynamic equation of motion for robots is not a simple task due to the large number of degrees of freedom and nonlinearities presented in the system [1–7]. The main goal in this manuscript is presenting a comparison between two methods for obtaining the dynamic model of a robot manipulator in the joint space. The first method is based on the Euler-Lagrange formulation an the second one is a sintering of Euler-Lagrange's methodology by applying the model's properties.
This paper is organized as follows: Section 2 describes the simplified formulation and their main properties and assumptions; using both methodologies an evaluation example is presented in Section 3; In Section 4 we present a prototype description about the two degrees of freedom robot modeled on Section 3; the main experimental results are shown on Section 5 and the main computational results are shown on Section 6. Finally, we will offer some concluding remarks in Section 7.
2. Simplified methodology
The methodology proposed is based on the following simplification from Euler-Lagrange methodology:

Basically, an operation and physical considerations are performed to simplify the original equation from Euler-Lagrange. The following are considerations which are made to simplify the Euler-Lagrange equation and get the proposal.
Analyzing Euler-Lagrange's equation, we can observe that the first term defines vectors
Proof. By replacing the lagrangian value

we can observe that the potential energy U(

In classical mechanics, the kinetic energy is given by [6–8]:

where m is the mass, v is the velocity of the body,

Now we proceed to analyze the second element from the Equation (2), which again replaces the Equation (5) as follows:
If we replace the obtained results from equations (6) and (7) on Equation (2) and grouping respecting to

The Coriolis matrix

It is well-known that Coriolis matrix has the following properties [1, 4, 7–12]:

it is skew-symmetric [1, 4, 7–12].
Another important property related to the Coriolis matrix is [1, 4, 7–12]:

Next, we present the set of assumptions underlying the methodology proposed.

Proof. Replacing Equation (11) in Equation (9) we have:

grouping the Equation (13) we have:

It is well known that generalized gravitational forces vector is defined as [1,4,7,8,11,12]:

Now, by substituting the Equation (11), (14) and (15) in the Equation (8) we have:

reducing terms:

we have:

Until this moment the characteristics from Coriolis matrix and their interaction with the Euler-Lagrange equation have been described. It is necessary noting that the matrix
where the first term is symmetric and the second one is skew-symmetric [13].
Proof. Expressing the matrix

the symmetrical term of the matrix

by grouping the equation we get:

as it is shown the result corresponds to the symmetric matrix
Proof. Expressing the Coriolis matrix according to the

For the proposed methodology is considered only the symmetric part of the Equation (25) ignoring the effects of the skew-symmetric term

It should be noted that the Equation (26) is valid under
Substituting Equation (11) into Equation (26) we get:
Considering the

Proof. Solving the Coriolis matrix from the Equation (27) we have:

In order to obtain the dynamic model of a robot manipulator based on the proposed methodology we proceed to implement the assumptions developed above. Substituting equations (15) and (30) in the Equation (8) we obtain:

Finally, applying
As it is shown in Equation (32) the Coriolis matrix is symmetric, generating a dynamic model completely symmetrical.
The simplified Euler-Lagrange's equation proposed in this methodology is defined as:

with the unique consideration for applying
Finally we can conclude that the importance of developing alternative formulations for the dynamic model of a system is by obtaining tractable models for calculation systems more efficiently.
3. Example: Robot of two degrees of freedom
In order to understand the proposed formulation technique for obtaining the dynamic model, the proposed methodology is applied to a robot arm with two degrees of freedom.
3.1. Euler-Lagrange formulation
The first step consists of obtaining the forward kinematics of the system described in Figure 1; the forward kinematics are:

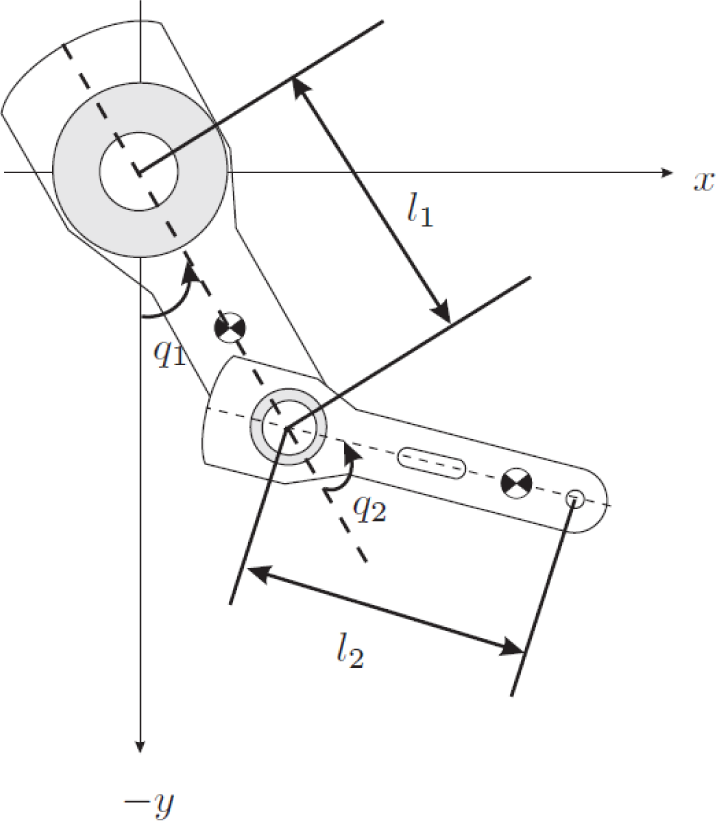
Robot of two degrees of freedom
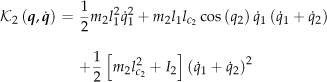
Considering kinetic energy K (

By definition of the kinetic energy, Equation (5), the velocity is represented for the square; like the velocity v is a vector we must obtain the norm [8]:

thus we have:


When replacing equations (37) and (38) in Equation (5) we have:

The total kinetic energy K(

Now, we continue to find the potential energy U(


the total potential energy U(

The next step is to calculate the Lagrangian

To calculate the Lagrangian we use equations (39), (40), (42) and (43) [8]:

Now the next step is to evaluate the Euler-Lagrange Equation (2), by using the Lagrangian described in Equation (46) [8].
We initiate solving term
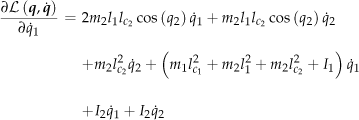

later the equations (47) and (48) are derived, then we have:
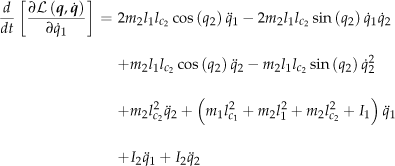

and finally we solve the term


Grouping terms and applying trigonometrical identities we have:


thus we have:
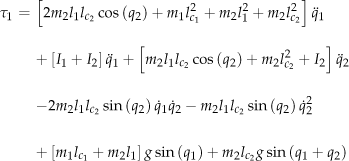

where τ1 y τ2 are the applied torque [8]. The vectorial representation of equations (55) and (56) are defined as follow:

where:
3.2. Proposed methodology
In order to apply the proposed methodology based on the Equation (1), the first step consists by obtaining the forward kinematics of the system described in Figure 1; the forward kinematics are:

Considering kinetic energy K (

By definition of the kinetic energy, Equation (5), velocity is represented to the square; like velocity v is a vector we must obtain the norm:

thus we have:


When replacing Equation (52) in Equation (2) we have:


The total kinetic energy K(

Now, we continue to finding the potential energy U(


the total potential energy is defined as:

Now we solve Equation (6) by parts, the first part is the term



the following step is to derive equations (70)–(73):




accommodating equations (74)–(77):


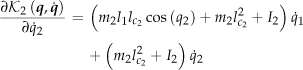
Considering only the elements which form the vector


The vectorial representation of equations (80) and (81) are described by:
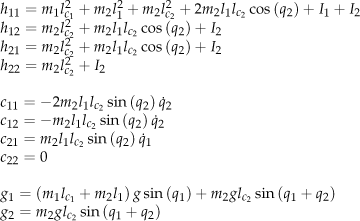
where:




When comparing equations (58) and (83) these are observed that the same value of the inertial matrix




In order to obtain the Coriolis matrix, the equality described on the




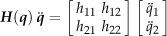
The vectorial representation of equations (91)–(94) are:

As the matrix of Centripetal and Coriolis torques is observed, it is symmetrical, being this value the suitable one for the system. Finally, we calculate the gravitational torque by applying the Equation (15):



accommodating equations (96)–(99):


thus we have:


Finally, if you want to get the same representation of Coriolis matrix obtained by applying the Euler-Lagrange method it will be used any of the following matrices:


4. Experimental system description
In this section we'll describe the prototype used to evaluate the dynamic models obtained by using both methodologies. In general terms, it consists in a hardware part and friendly software for its operation. Direct drive vertical robot manipulator with two degrees of freedom had rigid link with revolute joints. It is equipped with two brushless direct drive servo actuators from Compumotor® used to drive the joints without gear reductions. Advantages of this type of direct drive actuators includes freedom from backslash and significantly lower joint friction compared to actuators with gear drives. Motors used in the robot are listed in Table 1. The servos are operated in torque mode, so motors act like a source torque and they accept an analog voltage as a reference of signal torque [14].
Servo actuators of the experimental robot

The position of information is obtained from incremental encoders located in the motors. The standard backwards make difference with algorithm applied to the joint positions measurements which were used to generate the velocity signals. The links were made of 6,061 aluminum; the manipulator workspace is a circle with 0.98 meter of radius. DS1102 motion control board manufactured by dSpace® based on the Texas Instrument TMS320C3DSP is used for execution of control algorithm. The sampling period is actually set at 2.5 ms [14]. The physical parameters of the system are described in Table 2 [8,14].
Physical parameters of the prototype

The next step is to evaluate both models using the physical parameters of the robot arm with two degrees of freedom, Table 2, later compare through simulations performed with the program
4.1. Dynamic model using Euler-Lagrange formulation
Considering the matrix representation of the dynamic model, Equation (57), and the physical parameters of the prototype [8], Table 2, we have:










4.2. Dynamic model using the simplified methodology
Using the physical parameters of the prototype described in the Table 2 we can evaluate the equations (83)–(86), (91)–(94) and (102)–(103) and getting the dynamic model based on the Simplified methodology.










5. Experimental results
In order to support our theoretical developments in this section we present an experimental result using the proposed methodology for evaluating a robot manipulator of two degrees of freedom.
In order to evaluate the behavior from the obtained models we must program a PD control structure, to make a simulation using 
Gains used in the experiment

An important observation needs to be done: it is the value from gains used in the simulator should be the same as those programmed in the physical system. This ensures that by plotting the behavior of the simulations and data from the real system are in the same conditions.
Figure 3 shows the responses generated simultaneously by using the Euler-Lagrange methodology [E-L], the proposed methodology [P-M] and readings from the sensors of the robot. Specifically shows the response of the first link. Apparently the behavior is the same, but as shown in Figure 4 making a zoom around (1.070–1.115), there is a difference between the methods of simulation and current system behavior. As shown in Figure 4 the proposed methodology is better because it follows the robot behavior. Performing a graphs comparison shows a slight variation between which represents the absence of the skew-symmetric part of the Coriolis matrix [1, 8, 14]. The friction phenomena were not modeled for compensation purpose. Nevertheless, in spite of the presence of the friction, phenomenon which doesn't have a mathematical structure can't be modeled [8, 14].

Direct-Drive robot arm of two degrees of freedom
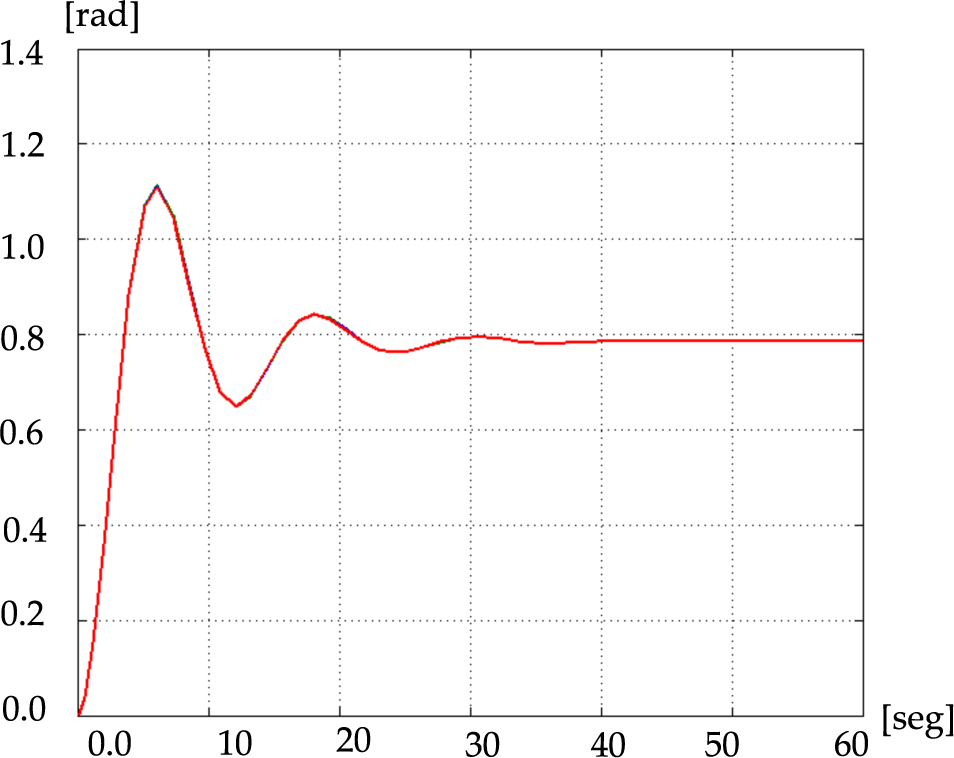
First joint behavior (Robot and both metodologies)
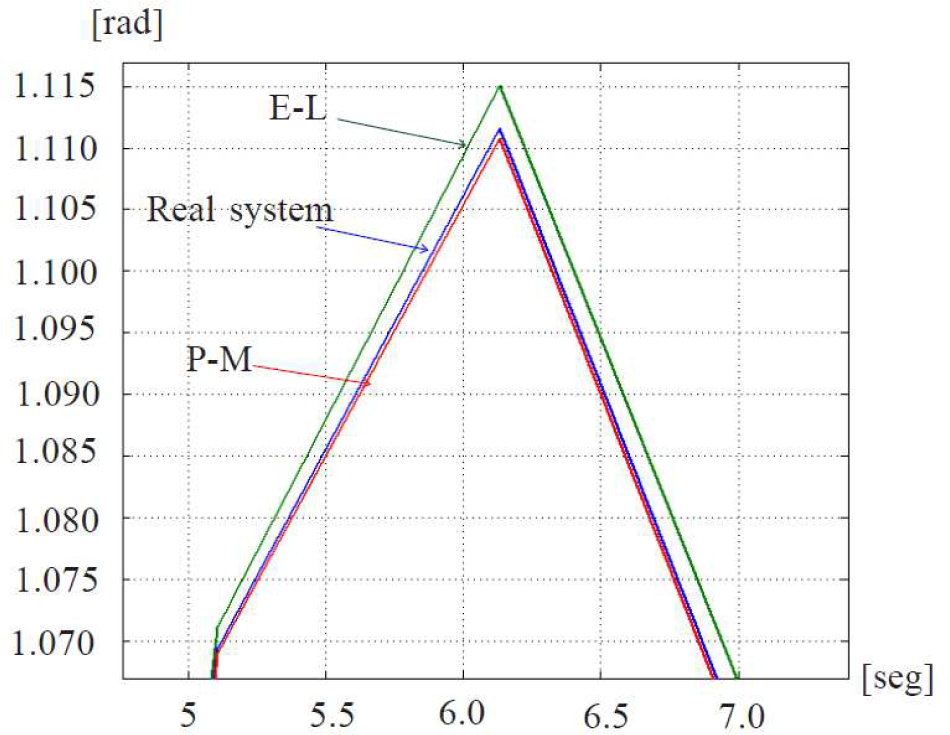
Specic area of comparison of the behavior
5.1. Performance Index
Robot manipulators are very complex mechanical system, due to the nonlinear and multivariable nature of its dynamic behavior. For this reason, in the robotics community it is not well established a criteria for an appropriate evaluation in controllers for robots [1,14].
However, it is accepted in practice to compare the performance of controllers by using the scalar-valued 
where t0, t ∈ ℝ+ are the initial and final times, respectively. A

Performance index
6. Computation time
After analyzing the performance index of both methods it is important to compare the computation time to determine the best performance. By considering several elementary systems we will demonstrate that the reason for the emergence of quite complex behavior is feedback. In a system model embodying feedback loops, state variables are fed back to influence their own rates of change. Feeding back a state variable to its own derivative can be direct or also involve several other state variables. Qualitative analysis of the feedback loops in a system can give insights into its possible behaviors. Most important is whether a feedback loop is positive or negative. When traversing thee feedback loop, we can count the signs of the direct influences between the state variable. When the sign of a function fi is positive, we speak of a positive influence from qi–1 to qi, which means that a positive value of qi-1 will make qi increase [15].
In order to analyze the performance we analyze the computation time that takes each algorithm to solve an operation. The computation time evaluation is performed using 
The symbolic program programmed in 
performing an operation within 2.1618e + 001 seconds.
The simulation of dynamic models, obtained using both methods were compared with experimental data and applying the

Computation time
The models are evaluated solving them for the same position, using the same gains and the same numerical method (Runge-Kutta 4). The computation time was obtained using
Should be noted that if in performing the task of moving the system to only one position there is a difference in time of execution, it is cumulative, so that, when performing a task consisting of a sequence of desired positions, using the proposed methodology, the model will make the task much faster compared with the model obtained using Euler-Lagrange methodology.
7. Conclusions
It is noteworthy that a model is an abstraction of reality used to address a problem, usually is simplified in symbolic terms and posed from a mathematical point of view.
To model it is necessary to raise a number of hypotheses, so that the system is represented and sufficiently defined in the idealization, but also seeks to keep the simple model enough to be manipulated and studied [15, 16].
Obtaining the mathematical model implies a number of assumptions, simplifications and limitations that involves tolerable errors. This means that there is always uncertainty when the system is modeled and it is reasonable to know that some extent these involved errors. Often the model contains errors due to the complexity of the system, the unknown parameters and external shocks are difficult to quantify [15, 16].
These errors can be disastrous in practice therefore continually are developed new methods and control laws that seek to be robust for uncertainties in the model. Although various methods have been developed for obtaining the dynamic model of a system, it is still inaccurate, introducing tolerable errors ultimately affects system performance [15, 16].
The methodology proposed in this manuscript presents a better performance than the traditional methodology of Euler-Lagrange, because as it is observed it presents one better structure of the matrix of Centripetal and Coriolis torques, fulfilling the proposed theorems and the properties of the model. This allows us to conclude that from the mathematical point of view the simplified methodology is easier to manipulate than the methodology of Euler-Lagrange, in addition the synthesized method presents a better performance.
It is necessary to emphasize that the proposed method is the result of the rigorous studies of the traditional method from Euler-Lagrange, being validated the procedures when fulfilling the properties of the dynamic model, which gives the mathematical formality and its validity.
Footnotes
8. Acknowledgements
The authors thanks the support received by Facultad de Ciencias de la Electrónica on Benemérita Universidad Autónoma de Puebla, Mexico; and also by the revision on manuscript to Lic. Oscar R. Quirarte Castellanos.