
Abstract
This paper presents the design of tendon-driven actuated fingers using a shape memory alloy for a hybrid anthropomorphic prosthetic hand. The ring and little (pinky) fingers are selected for shape memory activation due to their lower degree of movement during multiple grasping configurations. The fingers' tendon system is based on shape memory alloy (SMA) wires that form artificial muscle pairs for the required flexion/extension of the finger joints. The finger has four degrees of freedom such that three of them are active. An experimental setup was developed to evaluate the performance of the ring and little fingers. An electromyography (EMG) controlled Pulse Width Modulated (PWM) technique is preferred for the actuation of joint motions using a high speed microcontroller.
1. Introduction
Much work over recent years has been involved in the creation of an anthropomorphic hand, where the degrees of freedom (DOF) and the size of the hand and forearm are designed to be as close as possible to human proportions [1–3]. At present, there are a number of commercially available prosthetic hands, such as the i-Limb™ Hand which was first launched in 2007 by Touch Bionics, the Otto Bock's SensorHand™ Speed, and the Motion Control Hand. The bones in the hand skeleton form a system of rigid bodies connected together by joints with one or more DOF for rotation. The joints between the bones are named according to their location on the hand such as the metacarpophalangeal (MCP), interphalangeal (IP - the proximal interphalangeal (PIP) and distal interphalangeal (DIP) joints) and carpometacarpal (CMC). The nine IP joints can be accurately described as having only one DOF - flexion/extension. All five MCP joints, however, are described in the literature as saddle joints with two DOF: abduction/adduction (i.e., spreading the fingers apart) in the plane defined by the palm and flexion/extension. In prosthetic hands, active bending is restricted to two or three joints, which are actuated by a single motor drive acting simultaneously on the metacarpophalangeal (MCP) joints of the thumb, the index finger and the middle finger, while other joints can bend only passively. This limitation in dexterity is mainly due to the very basic requirement of the limited size and weight necessary for prosthetic applications [4,5,6]. DC motors are the actuator of choice within intelligent upper limb prostheses [7]. However, the weight and dimensions associated with suitable DC motors are not always compatible with the geometric restrictions of a prosthetic hand, reducing the available degrees of freedom and ultimately rendering the prosthesis uncomfortable for the end-user. Because of these limitations, the search is on-going to find a more appropriate actuation solution that is lightweight, strong and cheap. The development of active materials, such as Electroactive Polymers or Shape Memory Alloys (SMA), that are operationally similar to the human muscle, have encouraged the development of hands. SMAs are metallic alloys that can exhibit an actuation mechanism resembling the biological muscle - they contract, producing actuation forces. These muscle-like actuators present a high power to weight ratio, enabling the development of compact, lightweight prosthetic devices without too much compromising of its power capabilities and eliminating the forced-tradeoff between dexterity and anthropomorphic size, weight and appearance [8,9]. Considerable efforts have already been made by different research groups worldwide to develop articulated robotic hands or finger mechanisms using SMAs as the power elements of their actuation system [10]. The essential grasps and postures required for most human manipulation tasks are spanned by the eight canonical postures, which include a pointing posture (e.g., for punching buttons or keys), tip and lateral grasps between the thumb and forefinger (for grasping small or thin objects), a tripod (or palmar) grasp between the thumb, forefinger and middle finger (for the more stable grasping of intermediate sized objects), a hook grasp (e.g., for carrying a briefcase), cylindrical and spherical whole hand grasps (e.g., for the whole-hand grasping of cylindrical or spherical objects), and a platform posture (e.g., for holding a book or a plate). In addition to achieving these postures and grasps, there are additional design objectives which are based on surveys of upper extremity amputees [11,12]. The idea of a reduced DOF multifunctional hand is discussed in the engineering research literature. This idea of limiting the function of the hand to a number of DOFs sufficient to recreate the grasp patterns of Keller et al. [13] turns up in many unrelated fields when a compromise must be made between function and some other variable.
Practical inputs typically come from muscular activity, (a) directly, (b) indirectly through joints, and (c) indirectly from by-products of muscular contraction (myoelectricity, myoacoustics, muscle bulge and mechanical/electrical impedance). Although signals can be obtained from brainwaves, voice, feet, eyes and other places, these sources of control have not been shown to be practical for artificial limb control [14]. For externally powered devices, electromechanical switches and myoelectric control are the main sources of control. Myoelectric control derives its name from the Latin word for muscle (myo) and the resulting by-product of electricity that muscle contraction creates. It is commonly called electromyography (EMG) control, although strictly speaking electromyography refers to the recording of myoelectric signals rather than to the actual signals themselves. When a muscle contracts, an electric potential is produced as a by-product of that contraction. If surface electrodes are placed on the skin near to a muscle so they can detect this signal. The signal can then be electronically amplified, processed and used to control prosthesis [15]. This paper focuses on the design of a finger which is to be actuated using SMA under an EMG signal. These fingers will use a hybrid prosthetic hand, which is the ultimate goal.
2. Description of the Actuation Structure and Hand Design
As previously mentioned, these fingers are part of a Hybrid Hand and a finger's tendon system based on shape memory alloy (SMA) wires. The other three fingers used for a tripod grasp, two identical fingers (index and middle finger) and the thumb, will be actuated by DC motors. Each motor unit consists of a brushless motor that drives one or more tendons through a custom two-way clutch and pulley assembly. The motor units will be designed to provide the fingers with sufficient force and speed to perform the activities of daily life and to be as lightweight and efficient as possible.
2.1. Shape Memory Alloys
Shape Memory Alloys (SMAs) are a group of metallic materials that demonstrate the ability to return to some previously defined shape or size when subjected to the appropriate thermal procedure. The shape memory effect is due to the phase transformation from the austenite (parent) phase to martensite (product) phase and vice versa. These transformations take place because of changes in temperature or stress, or else a combination of the two [16,17,18].
The observable macroscopic mechanical behaviour of SMAs can be separated into two categories: the shape memory effect and the pseudoelastic (superelastic) effect. In the shape memory effect, an SMA material exhibits a large residual strain after loading and unloading. This strain can be fully recovered upon heating the material. In the pseudoelastic effect, the SMA material achieves a very large strain upon loading that is fully recovered in a hysteresis loop upon unloading. SMAs show different mechanical behaviours at different temperatures [17,18].

Relation of SMAs with heat [18]

Phase transformation and mechanical behaviour of SMAs
The most common shape memory material is an alloy of nickel and titanium called Nitinol. This particular alloy has very good electrical and mechanical properties, a long fatigue life and high corrosion resistance. As an actuator, it is capable of up to 8% strain recovery and 350 MPa restoration stress with many cycles. Therefore, such SMAs have been used in engineering applications for shape control, shock absorption, the damping of vibrations, automatic on-off switches and high force actuators [17].
2.2. The Fingers' Design
Some surveys of prosthetic users offer the following as important factors in the performance of a prosthetic hand:
1) Increased functionality;
2) Natural interaction with the environment;
3) Reduced weight;
4) Higher grasping speeds and forces;
5) Low noise;
6) Better cosmetic appearance.
Key Characteristics Comparing Actuation

Table Key: ✓✓ - Excellent ✓ - Good ✗ - Poor ? - Requires Investigation
These factors have been incorporated as design criteria for the prosthetic hand in a variety of ways. The SMA tendon actuated method was selected to cover the third and fifth criteria in these factors. SMA actuators have only emerged recently as a viable actuation technology for intelligent prosthesis design. As such, it is important to contrast their inherent characteristics with some of the more established actuation technologies for prosthetic applications (Table 1).
SMA actuators are the key elements for the development of a lightweight, noiseless and multifunctional prosthesis.
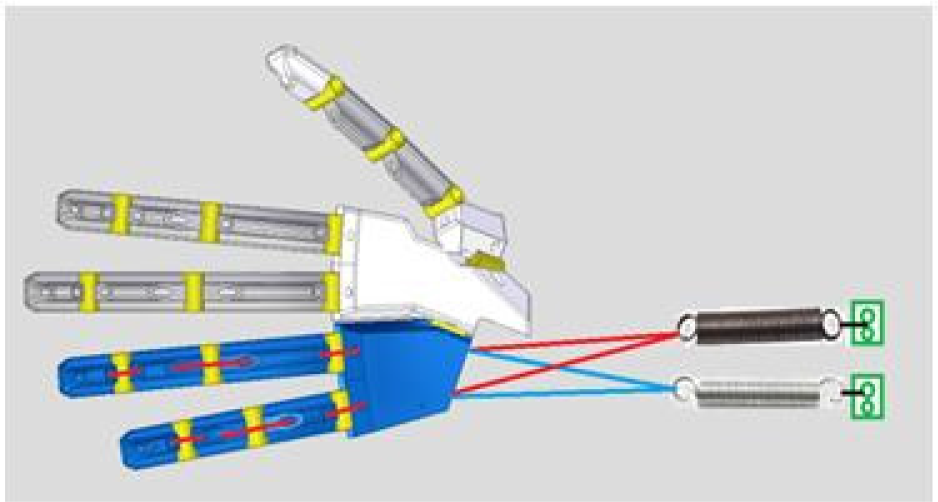
The designed fingers that were inspired by Vanderbilt's prosthetic hand [19] and have holes over the phalanx for the second tendon. The interphalangeal and metacarpophalangeal joints of the hand are fully compliant, with no internal bearings. With the use of compliant joints in fingers, the compliance provides a return force which simplifies the tendon actuation of the joints, since the active extension of the joints via an extensive tendon is not necessary. This kind of joint compliance has been used in several previous hand designs [1–9]. Because of the cooling problem of SMAs, phalanx springs are not enough for extensions after SMA actuated tendons are deactivated. Therefore, secondary SMA actuated tendons are used to help the springs for the extension of fingers in this study. As shown in Figure. 3, the ring and little fingers have 6 joints, which are driven by SMA Nitinol flexible cables that were attached directly to the fingers' structure, mimicking the tendon-driven configuration of the natural finger. One flexor cable and one extensor cable were an SMA-based tendon-driven actuation system which was attached to the Distal Phalanx links. Each joint consists of a pair of opposed wound torsional springs which are supplemented with two sets of inserts that together diminish compliance in the off-axis directions and, thus, enable a better approximation of revolute joint kinematics. In this way, the tendons are always exclusively under force control. When a finger comes into contact with a rigid object, the mapping changes instantaneously from position to force control. The compliant joints also provide for insensitivity to shock, which is an important characteristic in prosthetic devices and enables limited deformation along other axes, such as finger abduction. Figure 4. shows a solid model of a full hand.
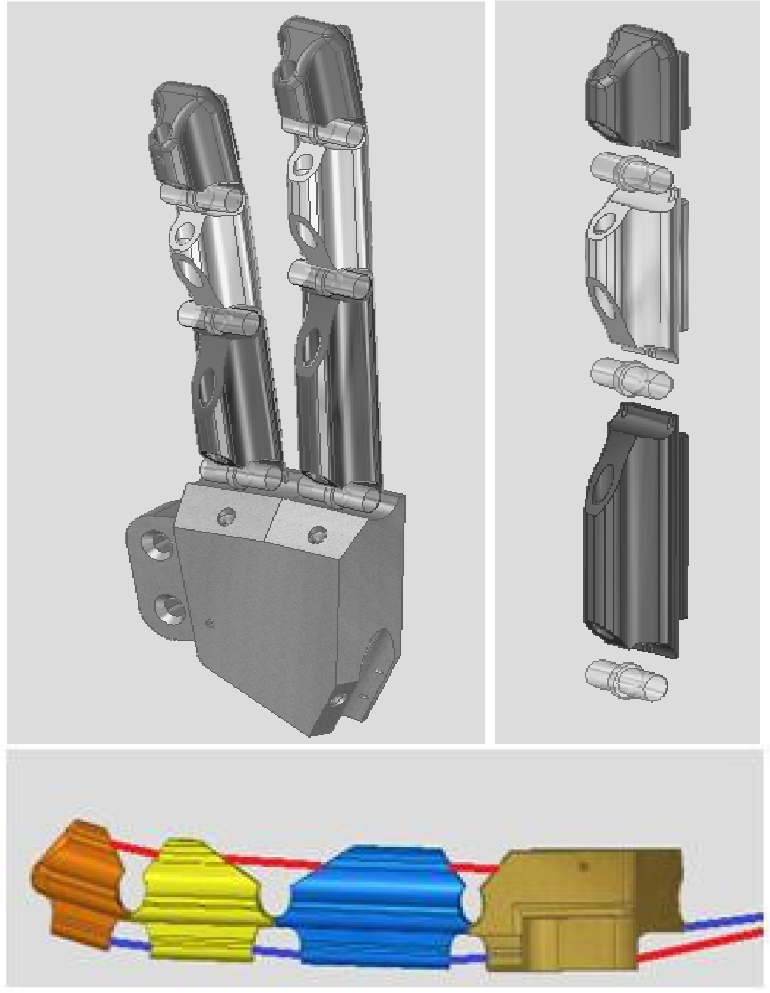
Solid model of the fingers
Solid model of a full anthropomorphic hand
The fingers prototype has been fabricated using a Rapid Prototyping technique (SLS process) and assembled as shown in Figure. 5. For this prototype, a fibre-reinforced plastic composite with strength and stiffness is used. The assembling process allows this prototype to perform grasping tasks.

Prototype of the fingers
3. Experimental Test-bed Design
A test-bed was developed to facilitate the testing of the SMA–spring (Figure 6.). The test-bed can be used in an open or an enclosed state, depending upon the nature and objectives of each individual experiment. A micro-thermocouple is used to measure the temperature. LVDT is employed in the measurement of the rate of contraction and expansion of the SMA under thermal excitation. In other words, it is used in order to measure the displacement generated by the actuation unit. External disturbances are filtered using a high-order filter.

Test-bed for the fingers
Since the SMA transformation occurs as a continuous change over a temperature range, the latter is controlled by the input current and the input current is controlled by the input voltage due to the resistance of the SMA being based on its length. The rate of contraction/deformation is controlled in a continuous fashion by controlling the input voltage of the SMA. However, the design of a control system for SMA actuators can be a very complex task if the device requires precise control. Many factors contribute to this problem, such as the contraction/deformation rate not being at precisely 5%, the spring response and the different weights of objects grasped.
4. Finger Actuation Design
Myoelectric control will be the main source of control for the Hybrid Anthropomorphic Prosthetic Hand. Therefore, the designed fingers were controlled by the actuation unit for the fingers which was designed to provide the main daily activity movement, in other words, the activity of daily living (ADL). In our work, the artificial tendon cables were attached to the finger structure, routed through the finger core and connected to their corresponding SMA actuators. Actuation is controlled by the electrical heating of the Flexinol spring. The Pulse Width Modulated (PWM) technique is preferred. In addition, the overall energy efficiency can be increased by using PWM instead of the DC direct drive technique.
A microcontroller (dsPIC33FJ32MC302) from Microchip Technologies was used to control the finger motion. This microcontroller, which is part of a family of 16-bit Digital Signal Controllers (DSC), was programmed with a simple proportional controller as a PWM control signal [20]. The PWM control signal operated to power MOSFET transistors, acting as switches to modulate the voltage applied to the SMA actuators. Two SMA actuators were used for extension and flexion on both fingers. Although torsion springs were used for flexion, it was not enough for quick and full flexion. Therefore, a second tendon was attached to fingers. The duty cycle and frequency of the PWM can be specified by writing to specific dsPIC registers. The PWM duty cycle ranged from 0% to 100%. An external power supply provides the necessary voltage and custom-made electronics are used to feed the Flexinol wire with the desired current. The supervision and experimentation with this test-bed is carried out through a graphical Matlab environment. The basic structure of control system is shown in Figure 7.

Control system structure
The PWM signals applied are voltage signals of uniform height and variable duration. Varying the duty cycle of the PWM signal varies the average control energy that is directed to the SMA actuator. As mentioned previously, there are two tendons for flexion and extension. The SMA actuation systems send control signals to flexor or extensor tendons based on signals from the EMG data. Using a 400 msec current pulse of 0.8 A, the force capability for the two coupled (ring/pinky) fingers are shown in Figure. 8. The representative responses of the outermost loops for the fingers are shown in Figure. 9. Specifically, this figure shows the responses for a 20° step command for the flexion and extension of the fingers. The performance of the SMA actuated fingers was assessed by open loop experiments. The obtained results are encouraging for future work with a full hand prototype.
5. Conclusion
This paper described the design of tendon-driven actuated fingers using a shape memory alloy for a hybrid anthropomorphic prosthetic hand. The advantages of the designed fingers are a human-like appearance, simple and direct controllability, low weight and noiselessness. A microcontroller-based pulse-width-modulated controller was implemented to evaluate the performance of the fingers. The fingers are capable of providing less movement during multiple grasping configurations. Future work includes the design of a full version of the hand with dc motor-actuated fingers (thumb, index and middle), wherein the actuation units are located within the hand.

Fingertip Force

Flexion and extension step responses
Footnotes
6. Acknowledgments
I am greatly indebted to Professor Michael Goldfarb, his team and Atakan Varol, for their contributions to all aspects of my work on prosthetics, as well as my time at Vanderbilt University.