
Abstract
The inverted pendulum robot is a classical problem in controls. The inherit instabilities in the setup make it a natural target for a control system. Inverted pendulum robot is suitable to use for investigation and verification of various control methods for dynamic systems. Maintaining an equilibrium position of the pendulum pointing up is a challenge as this equilibrium position is unstable. As the inverted pendulum robot system is nonlinear it is well-suited to be controlled by fuzzy logic. In this paper, Lagrange method has been applied to develop the mathematical model of the system. The objective of the simulation to be shown using the fuzzy control method can stabilize the nonlinear system of inverted pendulum robot.
1. Introduction
In recent years, the researchers wish to simulate human stance on the machine. In this paper, the model is constructed based on purely inverted pendulum dynamics and on a movable supportive base. This work was based on the assumption that the act of maintaining an erect posture could be viewed. However, the problems often are a complicated nonlinear system (Figure 1) [1].
Inverted pendulum robot is the abstract model of many control problems which the gravity center is upper and the fulcrum is lower and it is unstable object. In the control process it can reflect a number of key issues effectively such as the system stability, nonlinear problem, controllability, robustness and so on. As a controlled object it is a higher order, nonlinear, multi-variable, strong coupling and unstable rapid control system. Walking robot joint control, the vertical degree of control in rocket launch, satellite attitude control, those all related to the stability of the control problem that of upside-down objects. Therefore, the inverted pendulum control strategies can be applied to aerospace, military, robotics, industry and others areas, to solve the balance problems.
Recently, some authors proposed several control methods to control the nonlinear systems by using fuzzy system models [1–9]. The affine fuzzy system means the fuzzy system of which consequent part is affined and which has a constant bias term. It is well known that such models can describe or approximate a wide class of nonlinear systems. Hence, it is important to study their stability and the design of stabilizing controllers. Besides, robust stability also has been considered in literatures which have presented robust stability analysis and methods for designing robust fuzzy controllers to stabilize a class of uncertain fuzzy systems. In general, stability analysis and synthesis can be extended to the time-delay systems. Time delays often appear in industrial systems and information networks. Thus, it is also important to analyze time-delay effects for the affine fuzzy systems.

Inverted pendulum robot system to simulate human stance
Nowadays, fuzzy logic is one of the most used methods of computational intelligence robot [10–14] and with the best future. Oscar Castillo et al. [15] describe the application of Ant Colony Optimization (ACO) and Particle Swarm Optimization (PSO) on the optimization of the membership functions parameters of a fuzzy logic controller (FLC) in order to find the optimal intelligent controller for an autonomous wheeled mobile robot. The results obtained by the simulations performed are statistically compared among them and the previous work results obtained with GAs in order to find which is the best optimization technique for this particular robotics problem. And [16] presented a hybrid architecture, which combines Type-1 or Type-2 fuzzy logic system (FLS) and genetic algorithms (GAs) for the optimization of the membership function (MF) parameters of FLS, in order to solve to the output regulation problem of a servomechanism with nonlinear backlash. In this approach, the fuzzy rule base is predesigned by experts of this problem. The proposed method is far from trivial because of nonminimum phase properties of the system.
Intelligent control of robotic systems is a difficult problem because the dynamics of these systems is highly nonlinear [17–18]. Oscar Castillo et al. [19] develop a tracking controller for the dynamic model of unicycle mobile robot by integrating a kinematic controller and a torque controller based on fuzzy logic theory. Both the kinematics and dynamics models are used currently to design, simulate, and control robot manipulators [20–25]. The kinematics model is a prerequisite for the dynamics model and fundamental for practical aspects like motion planning, manufacturing cell graphical simulation and fuzzy servo control. For example, the inverted pendulum robot is a classical problem in controls [26–27]. The inherit instabilities in the setup make it a natural target for a control system. Inverted pendulum robot is suitable to use for investigation and verification of various control methods for dynamic systems. Maintaining an equilibrium position of the pendulum pointing up is a challenge as this equilibrium position is unstable. As the inverted pendulum robot system is nonlinear it is well-suited to be controlled by fuzzy logic. In this paper, Lagrange method has been applied to develop the mathematical model of the system. The objective of the simulation to be shown using the fuzzy control method can stabilize the nonlinear system of inverted pendulum robot.
The remainder of this paper is organized as follows: In Section 2, the expression of problems is presented. In Section 3, the fuzzy servo control method is proposed. In Section 4, linearization and stability analysis and the fuzzy rule is shown. Section 5 is the simulation results. Section 6 is the conclusion.
2. The expression of problems
Design of the robot naturally centered on the basic idea of an inverted pendulum. There would be a weight at the top of a long shaft and there would be some sort of mechanism attached to the bottom of this shaft that would be used to balance the weight at the top. Unlike most inverted pendulum experiments that consist of a cart on a track that limits mobility, this project was constructed much like a Segway to enable the robot to have a greater range of mobility. Kinematic and dynamic models for wheeled inverted pendulum robot as shown in Figure 2.

Kinematic and dynamic models for wheeled inverted pendulum robot
Lagrange method is adopt to establish the mathematical model because the number of equations equal to the degree of freedom system and modeling process can be simplified. The dynamics of inverted pendulum robot can be described in general form as follows [3].

where
3. Fuzzy servo control method
Fuzzy method has been used as alternative method to develop control rule for complex system. The method has been successfully implemented to the real-world application like engine control system of subway train. The idea behind of control method in this paper is to divide the operating region of nonlinear system into small area, and treated as a collection of local linear systems. After that, in order to develop the control law, fuzzy method has been apply to each local linear system and combines it as new control law as shown in Figure 3 (

Driving domain
Fuzzy method has been apply to each local linear system and combines it and can be define as

where
Let

Let


The fuzzy servo system can be rewrite as.

In order to develop new control rule, we calculate each local linear system control rule by using


Applied fuzzy method to each local linear system and combines it as new control law.
The control input u is

4. Linearization and stability analysis and the fuzzy rule
The inverted pendulum robot used in this paper is shown in Figure 2. It consists of cart and a pendulum. The cart is free to move the horizontal direction when the force F applies to it. We assume that the mass of the pendulum and cart are homogenously distributed and concentrated in their center of the gravity and the friction of the cart is proportional only to the cart velocity and friction generating by the pivot axis is proportional to the angular velocity of the pendulum. The parameters used for simulation are shown in Table 1. The mathematical model of inverted pendulum system can be described as follows.


With output as

Rom the equation, we know that the nonlinear coefficient for the system is
Parameters of inverted pendulum system

where

where


Base on the Lyapunov law: the nonlinear control system can be analyzed by the linearization system. The controllability matrix of the control system

is full-rank. Rank (S) = 4. So the inverted pendulum robot system is controllable.
Fuzzy rule:
The state equation of inverted pendulum robot can be shown as.


Set
IF
And in this part, Sand


5. Simulation results
Comprehensive analysis part B and C, feedback coefficient
where
As the result of simulation, the system is stable with this fuzzy input, but it is stable which initial angle of θ is between

The initial angle of θ is
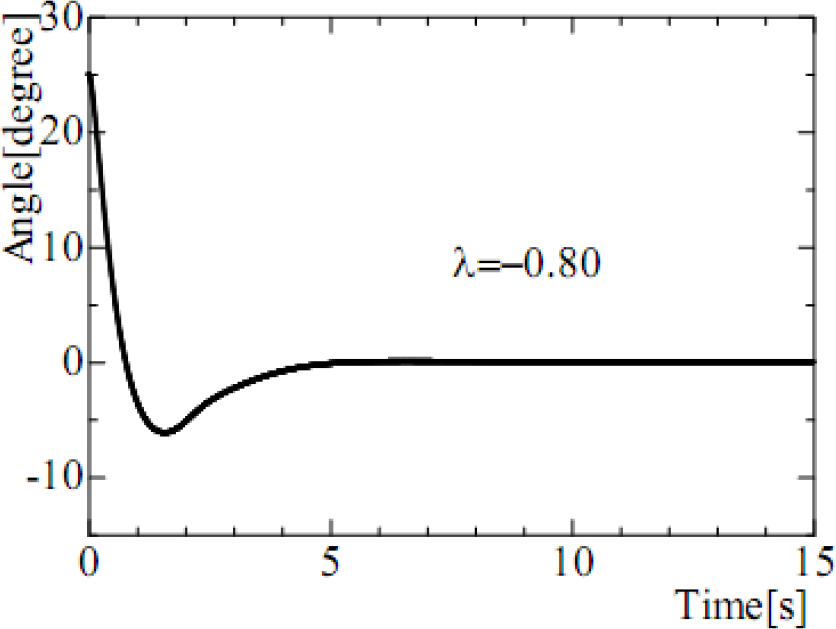
Result for simulation of θ
The simulation results show that with different poles, the system response different characteristics. With smaller pole, the overshoot of pendulum is smaller and settling time of pendulum is shorter. However, overshoot of cart is larger. Settling time of cart has the approximate same performance.

Result for simulation of x from 0s to 15s
6. Conclusion
In this paper, mathematical model of inverted pendulum is established based on Lagrange method, and from the simulation results, the fuzzy method [29–30] can make nonlinear system stable. This fuzzy method adapt to most of nonlinear system. For different needs, the system can provide different response characteristics. In the future, servo system will be established and simulated to improve the system performance by changing the parameters.
Footnotes
7. Acknowledgments
This work was financially supported by the Innovation Program of Shanghai Municipal Education Commission (12YZ148), the Project-sponsored by SRF for ROCS, SEM (2011-1568) and the Scientific Research Foundation of SUES (2012-01). The authors would like to thank the editor and the reviewers for their constructive comments and suggestions which improved the quality of the paper.