
Abstract
In this paper, a direct adaptive fuzzy control using a supervisory compensator is designed for the robust tracking of a MEMS gyroscope sensor. The parameters of the membership functions are adjusted according to the designed adaptive law for the purpose of tracking a reference trajectory. A fuzzy controller that can approximate the unknown nonlinear function and compensate the system's nonlinearities is incorporated into the adaptive control scheme in the Lyapunov framework. A supervisory compensator is adopted to guarantee the stability of the closed loop system. Numerical simulations for a MEMS angular velocity sensor are investigated in order to verify the effectiveness of the proposed adaptive fuzzy control scheme and show that the system using the designed fuzzy controller with a supervisory compensator has better tracking performance and robustness than that using only a fuzzy control without a supervisory compensator in the presence of external disturbances.
Introduction
Gyroscopes are commonly used sensors for measuring angular velocity in many areas of application, such as navigation, homing and control stabilisation. The performance of the MEMS gyroscope often deteriorates due to the effects of time-varying parameters as well as noise sources, such as mechanical and circuitry noise, quadrature errors, parameter variations and external disturbances.
It is necessary to use an advanced control, such as adaptive control or intelligent control, to control MEMS gyroscopes and in the last few years, various control approaches have been developed. Increasing attention has been given to the tracking control of MEMS gyroscopes. Leland [1] derived two adaptive controllers for a vibrational MEMS gyroscope which tune the drive axis’ natural frequency and the sense axis’ vibration to zero by a force-to-rebalance operation. Batur et al. [2] developed a sliding mode control for a MEMS gyroscope. Sun et al. [3] derived a phase-domain design approach in order to study the mode-matched control of gyroscopes. Antonello et al. [4] used an extremum-seeking control to automatically match the vibration mode in MEMS vibrating gyroscopes. Park et al. [5] presented an adaptive controller for a MEMS gyroscope which drives both of the axes of vibration and controls the entire operation of the gyroscope. Some adaptive sliding mode controllers have been developed to control MEMS gyroscopes [6–7].
System nonlinearities are inevitable in actual engineering and they require the controller to be either adaptive or robust. Intelligent control approaches such as neural networks and fuzzy control do not require mathematical models and have the ability to approximate nonlinear systems. Neural network technologies have been applied to nonlinear control systems [8–9]. Wang [10] proposed a universal approximation theorem and demonstrated that an arbitrary function of a certain set of functions can be approximated with arbitrary accuracy using a fuzzy system over a compact domain. Therefore a fuzzy logic system for approximating arbitrary nonlinear functions makes it a useful tool for adaptive applications. The key idea behind adaptive fuzzy logic systems is that a wide class of nonlinear systems can be approximated to arbitrary closeness by them. An adaptive fuzzy sliding mode controller combines the merits of a sliding mode control, a fuzzy inference mechanism and an adaptive algorithm. Guo et al. [11] proposed an adaptive fuzzy sliding mode controller for a robot manipulator. Tong et al. [12] designed a fuzzy indirect and direct adaptive control for a nonlinear system. Yoo et al. [13] developed adaptive controller for a robot manipulator using a fuzzy compensator. Wai et al. [14] presented an adaptive fuzzy neural network control design via a T-S fuzzy model for a robot manipulator which included actuator dynamics. Wai et al. [15] investigated an adaptive sliding mode control system for an indirect field-oriented induction motor drive so as to track periodic commands. Lee [16] proposed a robust adaptive fuzzy control by back-stepping for a class of MIMO nonlinear systems. Islam et al. [17] used a robust adaptive fuzzy output feedback control system for robot manipulators. Zhou et al. [18] developed an adaptive output-feedback fuzzy tracking control for a class of nonlinear systems. However, the application of fuzzy control to MEMS gyroscopes has never been performed in the literature and, therefore, it is necessary to adopt an adaptive fuzzy control that can adjust the parameter vector of the member functions on-line using an adaptive law for the vibration control of MEMS gyroscopes.
This paper focuses on the design of a direct adaptive fuzzy control for a MEMS gyroscope using a supervisory compensator. A direct adaptive fuzzy controller use fuzzy logic systems as controllers; therefore linguistic fuzzy control rules can be directly incorporated into the controller. The contribution of this paper lies is the integration of an adaptive control, a nonlinear approximation of a fuzzy control and a supervisory compensator. The study of the adaptive fuzzy controller is conducted on a MEMS gyroscope and it is applied to control the gyroscope and guarantee that the closed loop system is globally stable and tracking errors are as small as possible. In order to guarantee the robustness of the adaptive fuzzy controller, a supervisory compensator is incorporated into the adaptive fuzzy control scheme in the Lyapunov framework.
This paper is organised as follows. In section 2, the dynamics of the MEMS gyroscope are introduced and a non-dimensional procedure is described. In section 3, an adaptive fuzzy control is derived and Lyapunov analysis is implemented to guarantee the asymptotic stability of the closed-loop system. Simulation results are presented in section 4 to verify the effectiveness of the proposed adaptive fuzzy control. Conclusions are provided in section 5.
Dynamics of the Mems gyroscope
The dynamics of the MEMS gyroscope are described in Fig. 1. A typical MEMS gyroscope configuration includes a proof mass suspended by spring beams, electrostatic actuations and sensing mechanisms for forcing an oscillatory motion and sensing the position and velocity of the proof mass, as well as a rigid frame which is rotated along the rotation axis. The dynamics of a MEMS gyroscope are derived by Newton's Law in the rotating frame.

Simplified model of a z-axis MEMS gyroscope.
In a z-axis gyroscope, by supposing the stiffness of spring in direction z to be much larger than that in directions x, y, the motion of the poof mass is constrained to just along the x-y plane. Assume that the measured angular velocity is almost constant over a long enough time interval. Considering fabrication imperfections which cause extra coupling between the x and y axes, and ignoring centrifugal forces, the governing equation for a z-axis MEMS gyroscope is simplified as:

where x and y are the coordinates of the proof mass with respect to the gyro frame in a Cartesian coordinate system. In equation (1) d xx and d yy are damping coefficients; k xx and k yy are spring coefficients; d xy and k xy , quadrature errors, all of which are coupled damping and spring terms, respectively, mainly due to the asymmetries in suspension structure and the misalignment of sensors and actuators. The coupled spring and damping terms are unknown, but can be assumed to be small. The nominal values of the x and y axes’ spring and damping terms are known, but there are small unknown variations. The proof mass can be determined accurately.
Dividing both sides of equation (1) by m, q0, w02, which are a reference proof mass of a gyroscope, the length and natural resonance frequency respectively, yields the non-dimensional motion equation as:

where
The vector form of the MEMS gyroscope dynamic model can be written as:

where
If D, K
b
and Ω are unknown, (3) can be rewritten as:

where f(q,
Fuzzy control is very robust and capable of handling nonlinear systems, providing a methodology for representing, manipulating and implementing a human's heuristic knowledge about how to control a system. A fuzzy controller is composed of the following four elements: fuzzier, some fuzzy IF-THEN rules, a fuzzy inference engine and a defuzzifier. The fuzzy inference engine uses the fuzzy IF-THEN rules to perform a mapping from an input linguistic vector x = (x1, x2, ⃛, x
n
)
T
∊ R
n
to an output variable y ∊ R. The i-th fuzzy rule can be expressed as:

where
The output of the fuzzy system can be expressed using a centre-average defuzzifier, product inference and a singleton fuzzifier:

where
Control objective:
The control target for the MEMS gyroscope is to maintain the proof mass so as to oscillate in the X and y directions at a given frequency and amplitude: x m = A1 sin (ω1t), y m = A2 sin (ω2t).
The closed loop system must be globally stable in the sense that all variables x(t), θ(t) and u c (x|θ) must be uniformly stable. The tracking error should be as small as possible.
The procedure of the proposed adaptive fuzzy control as applied to the MEMS gyroscope is described in this section. The proposed adaptive fuzzy control scheme is shown by Fig. 2.
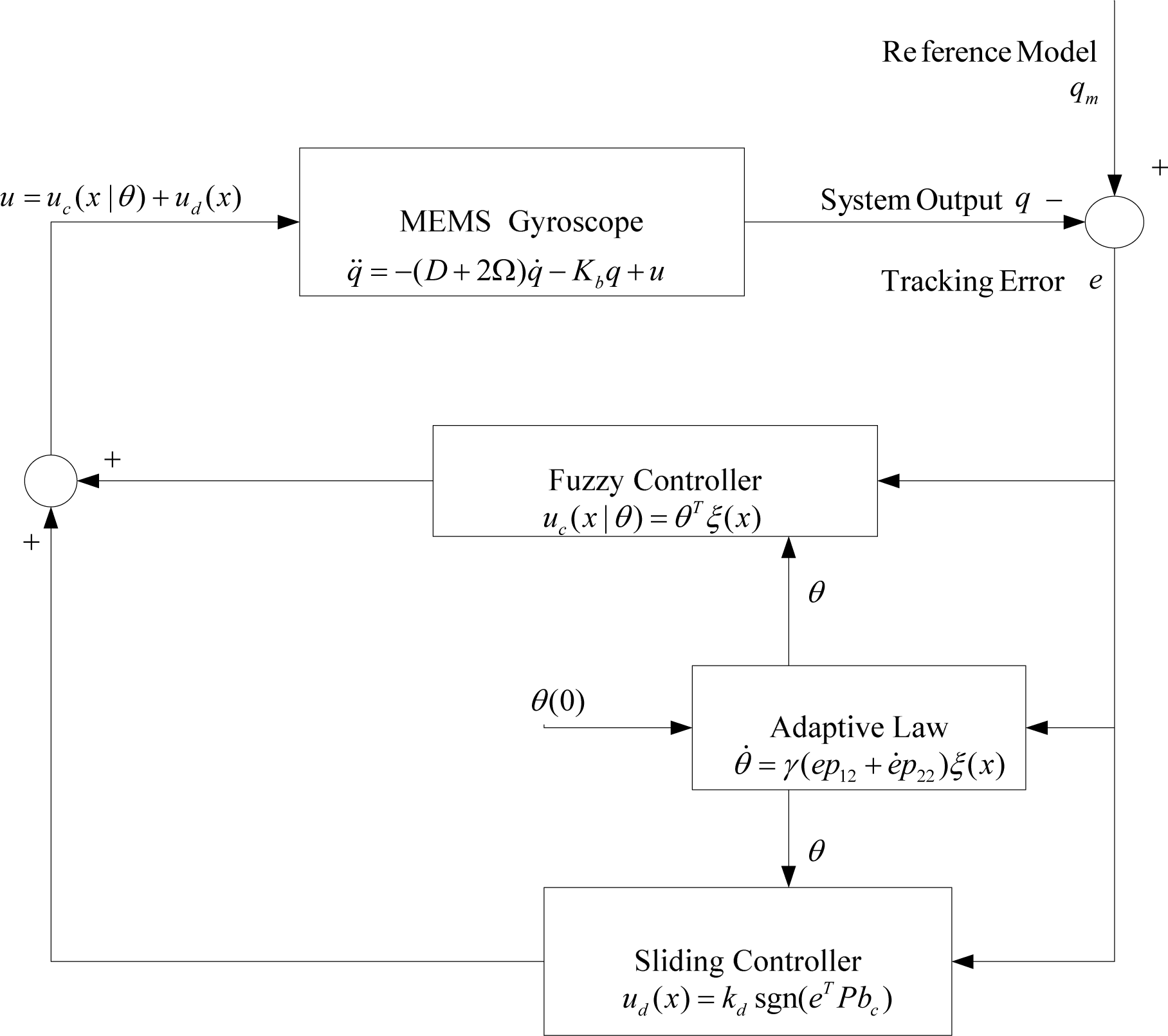
Block diagram of the adaptive fuzzy control system.
Rewriting (3) as:

The reference model is defined as:

where
Rewriting (8) as:

The tracking error is defined as:

Suppose that the controller u is composed of a fuzzy controller u
c
(x | θ) and a supervisory compensator u
d
(x):

where the fuzzy controller

where
Choosing the control force:

the controller u∗ will force the tracking error e(t) to converge to zero, where
The dynamic of tracking error can be derived as:

Substituting (13) into (14) yields:

or equivalently:

where

where
We define the optimal parameter vector thus:

The fuzzy approximation error vector is defined as:

As such, (16) becomes:

We define the Lyapunov function candidate:

where γ is a positive constant.
Suppose M = b
c
(θ∗ – ω)
T
ξ(x) – b
c
u
d
Differentiating V with respect to time yields:

If we choose the adaptive law:

then substituting (23) into (22) yields:
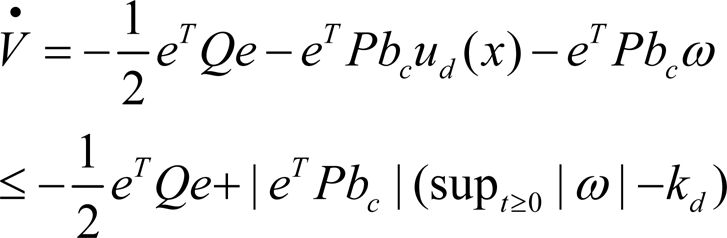
Choosing k
d
≥ supt≥0 |ω|, (24) becomes:

Here, we use the inequality:

where λ min (Q) is the eigenvalue of the matrix Q with a minimum real part.
In this section, we will evaluate the proposed adaptive fuzzy control approach on the lumped MEMS gyroscope sensor model [1] [5] by using MATLAB/SIMULINK. The control objective is to maintain the system to track the desired reference trajectory and adopt the adaptive fuzzy controller for the gyroscope model. The parameters of the MEMS gyroscope sensor are shown as follows:

The desired motion trajectories are x m = sin(ω1t), y m = l.2 sin(ω2t), where ω1= 6.71kHz, ω2 = 5.11kHz. The following six membership functions are selected in the region [−3,3] respectively, as shown by Fig. 3.

Curve of membership functions.

In the simulation, we allowed ± 10% parameter variations for the spring and damping coefficients with respect to their nominal values. We further assumed a ± 10% magnitude change in the coupling terms. The external disturbance
In order to eliminate chattering, the discontinuous control component in (11) can be replaced by a smooth-sliding mode component to yield:
u = u c (x | θ) + u d (x) = θ T ξ(x) + k d tanh(e T Pb c ) where S = e T Pb c .
First, we simulate the system response of MEMS gyroscope with u = u
c
(x |θ) and u = u
c
(x | θ) + u
d
(x) respectively. The tracking responses for these two different fuzzy controllers in the presence of the disturbance

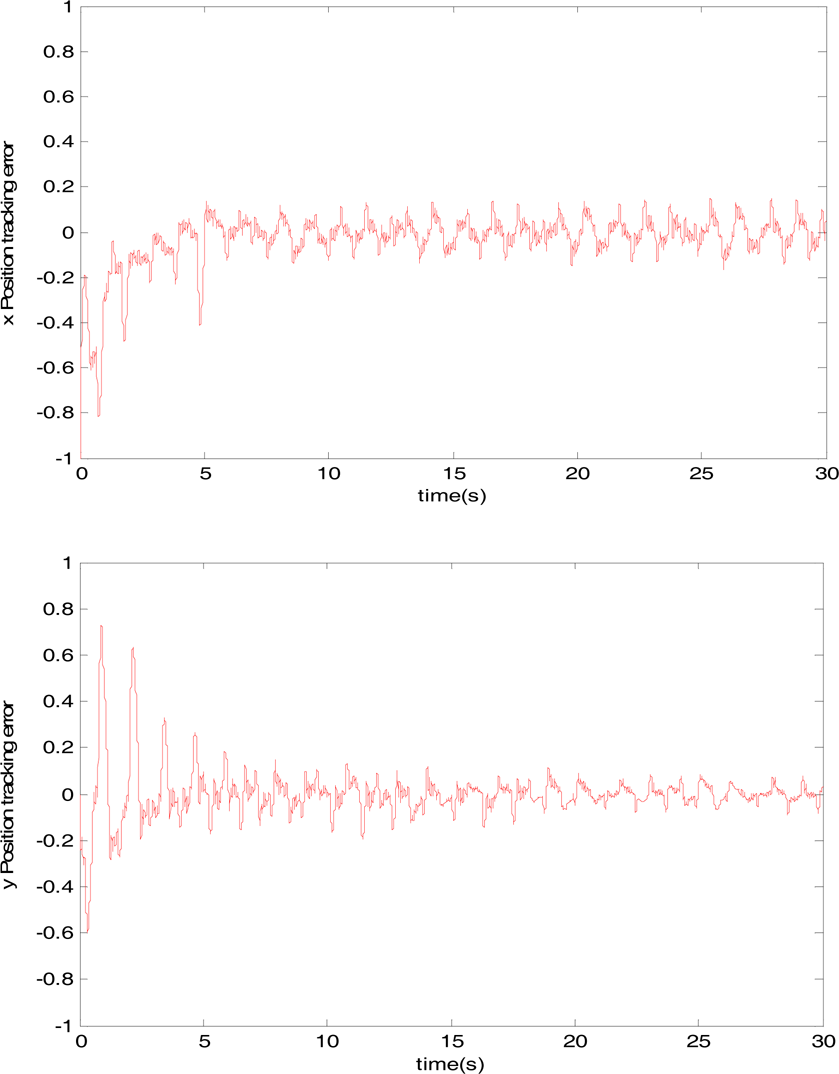
Property of the tracking trajectory using u = u c (x | θ)
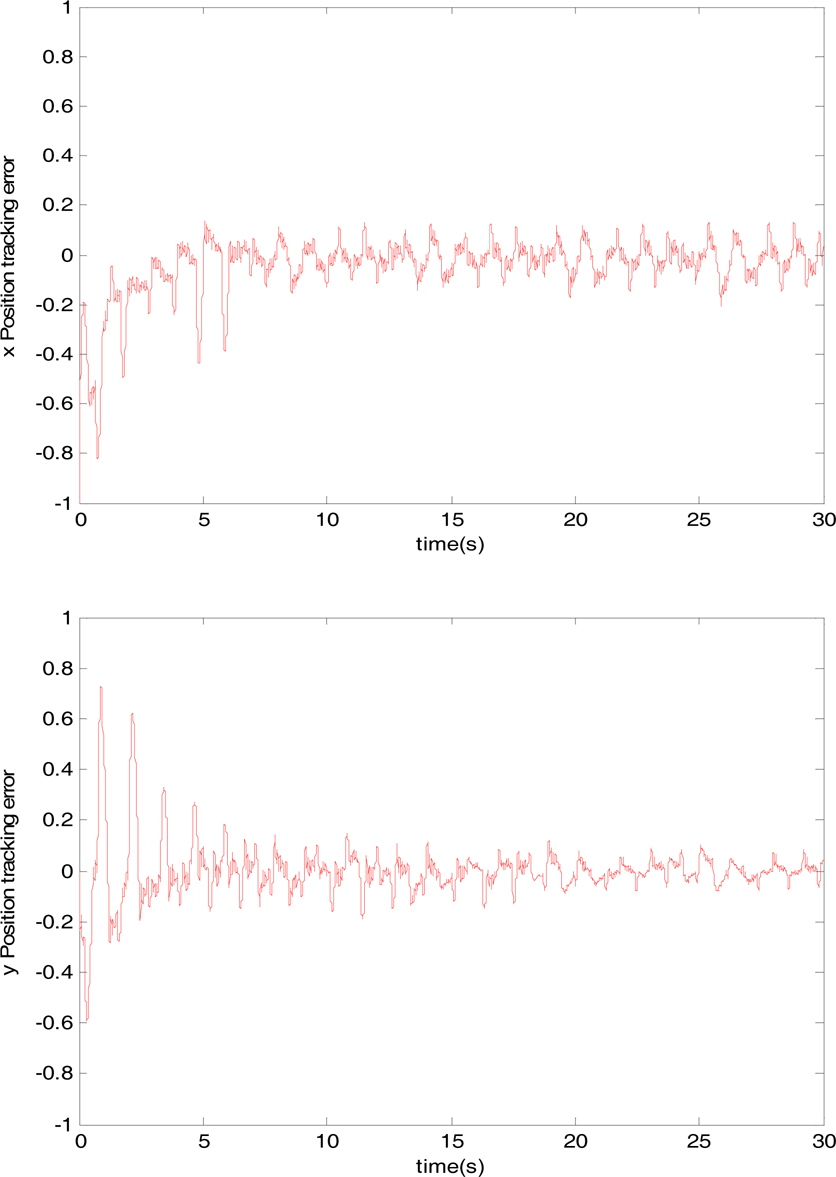
Property of the tracking error using
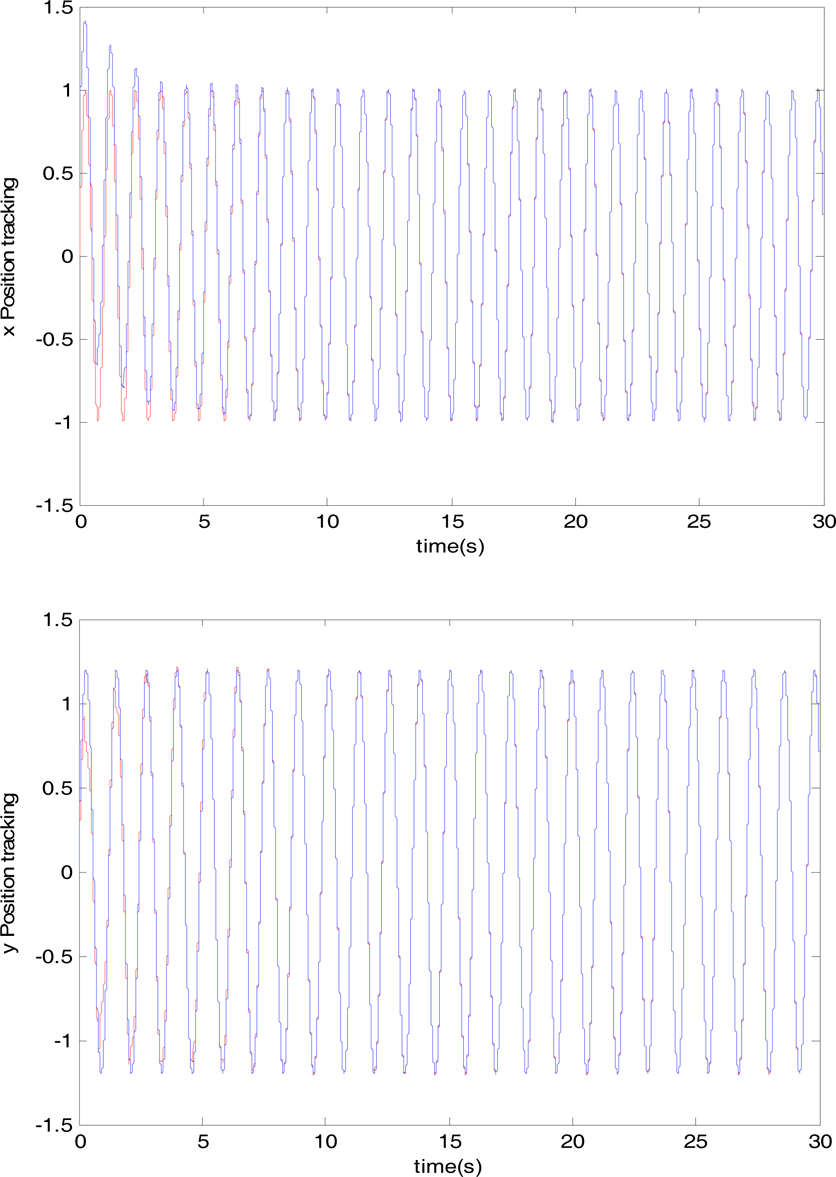
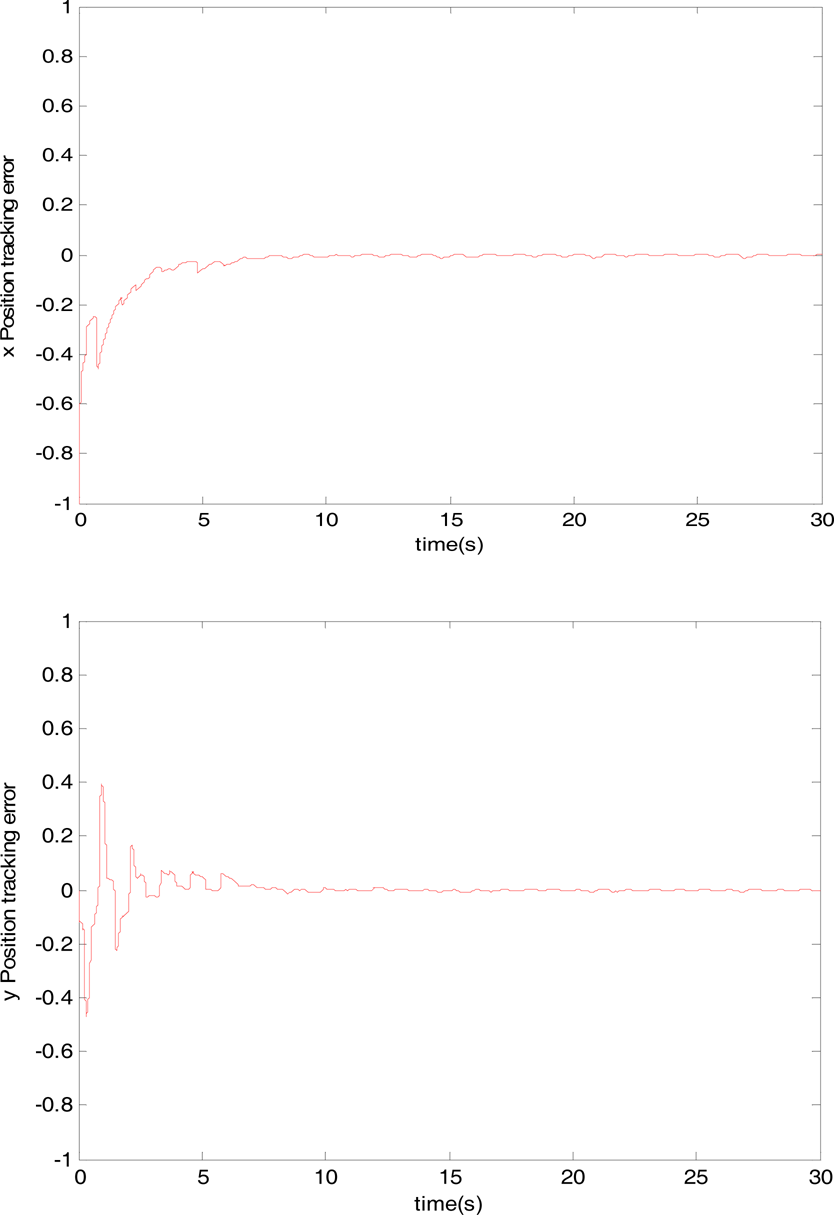
Property of the tracking trajectory using u = u c (x|θ) + u d (x)

Property of the tracking error using u = u c (x|θ) + u d (x)

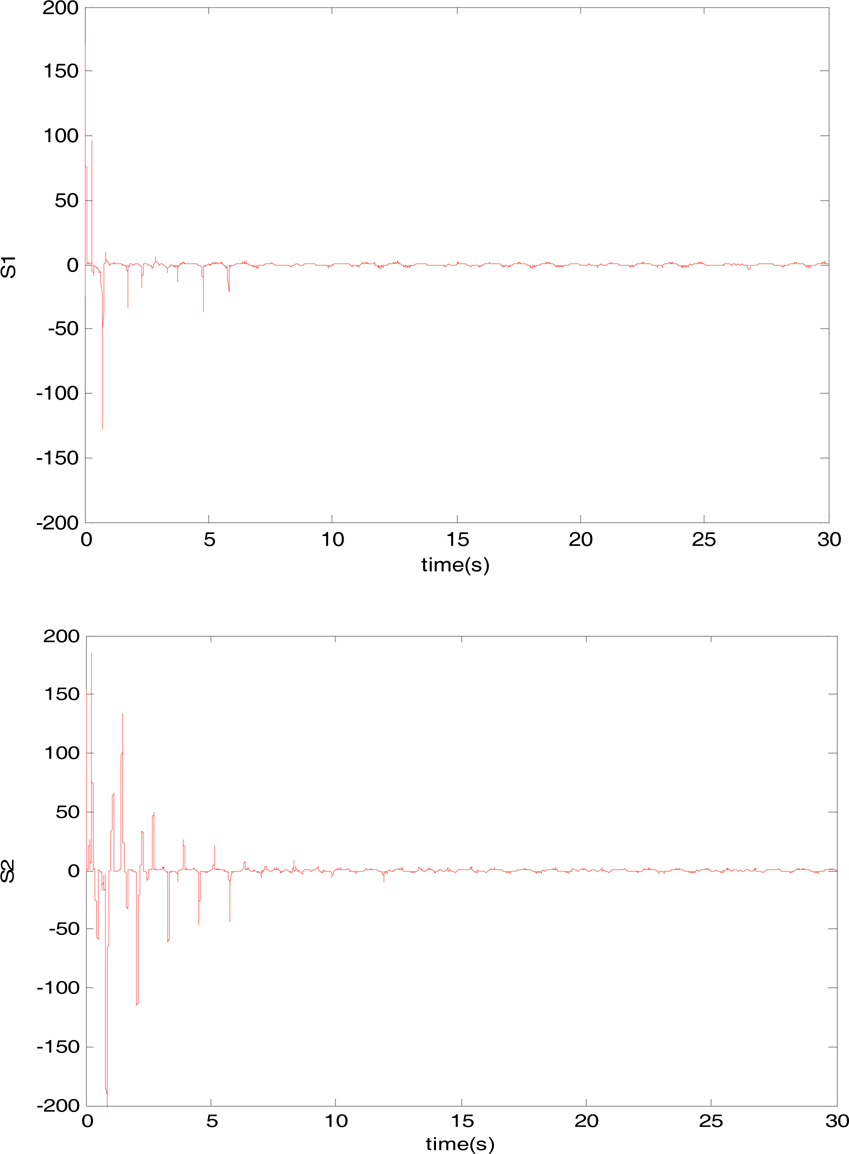
Control inputs using u = u c (x|θ) + u d (x)
Property of the sliding surface S = e T Pb c using u = u c (x|θ) + u d (x)
Figs. 4 and 5 show that the position-tracking trajectory and tracking errors of x, y only using u = u c (x | θ). It can be observed the tracking error is relatively large which is around the value of 0.2. Figs. 6 and 7 depict the position-tracking trajectory and tracking errors of x, y using u = u c (x | θ) + u d (x). It can be seen here that the tracking error is almost zero. Figs. 4–7 compare the tracking error between the system using u c (x | θ) and u = u c (x|θ) + u d (x). It can be seen that the system using a supervisory compensator u d (x) has better trajectory-tracking performance than that which uses only a fuzzy controller u c (x | θ), and the position of x, y can track the position of the reference model in a short time with the supervisory compensator. Therefore, it can be seen that the adaptive fuzzy tracking performance is satisfactory, the MEMS gyroscope can maintain the proof mass to oscillate in the x, y direction at a given frequency and amplitude with the proposed adaptive fuzzy control.
Fig. 8 plots the adaptive fuzzy control inputs using u = u c (x|θ) + u d (x). It can be seen that the chattering is diminished because of the use of a smooth supervisory sliding controller which can create a small boundary layer around the switching surface in which the trajectory will remain. Fig. 9 illustrates the property of the sliding surface S = e T Pb c using u = u c (x|θ) + u d (x), showing that it converges to zero asymptotically.
In order to show the robustness of the performance of the MEMS gyroscope, the disturbance
Property of tracking error using fuzzy controller u = u c (x|θ) with a large magnitude and high frequency disturbances
Property of tracking error using fuzzy controller u = u c (x|θ) + u d with large magnitude and high frequency disturbances
A fuzzy logic-based adaptive control for an angular velocity sensor is presented in this paper. An adaptive fuzzy controller that can incorporate fuzzy control rules directly into itself is used to adaptively adjust the parameters of member functions and make the tracking error as small as possible. Moreover, a supervisory compensator is added to the adaptive fuzzy control system in order to guarantee the asymptotically stability of the control system. A simulation study is implemented to verify the effectiveness of the proposed adaptive fuzzy control in relation to external disturbances. It can be concluded that the dynamic gyroscope system's responses are as expected, and adaptive fuzzy control with a supervisory compensator has better tracking performance and tracking errors asymptotically converge on zero.
Footnotes
6.
The authors would like to thank the anonymous reviewer for useful comments that improved the quality of the manuscript. This work is partially supported by the National Science Foundation of China under Grant No. 61074056, The Natural Science Foundation of Jiangsu Province and under Grant No. BK2010201, Scientific Research Foundation for the Returned Overseas Chinese Scholars, State Education Ministry.