
Abstract
Unmanned aerial vehicles have enormous potential applications in military and civil fields. A Quanser's 3-DOF helicopter is a simplified and benchmark experimental model for validating the effectiveness of various flight control algorithms. The attitude control of the 3-DOF helicopter is a challenging task since the helicopter is an under-actuated system with strong coupling and model uncertainty characteristics. In this paper, an adaptive integral backstepping algorithm is proposed to realize robust control of the 3-DOF helicopter. The proposed control algorithm can estimate model uncertainties online and improve the robustness of the control system. Simulation and experiment results demonstrate that the proposed algorithm performs well in tracking and under model uncertainties.
1. Introduction
In recent years, fixed-wing and rotary-wing unmanned aerial vehicles (UAVs) have been rapidly developed and been equipped with intelligent flight control devices. [1, 16]. Compared with a fixed-wing flying vehicles, a rotary-wing flying vehicle holds advantages in takeoff, landing and hovering in small-scale area. Hence, it possesses specific applications such as building surveillance, emergency transportation and geographical information collection. In many countries, governments have invested vast resources into research on this kind of vehicle. A Quanser's 3-degree-of-freedom (DOF) helicopter is a simplified and benchmark experimental platform for testing the effectiveness of various flight control algorithms. The control objective is to enable the three Euler angles of the helicopter to converge into the desired values. However, the high performance control of 3-DOF helicopter is a challenging task because of the existence of the following control difficulties. Firstly, it is an under-actuated system with two control inputs and three outputs. Secondly, some strong coupling characteristics appear between pitch motion and travel motion. Thirdly, it is difficult to get the accurate mathematical model and parameters of the helicopter. Besides, sometimes the model parameters may change. Therefore, these difficulties prevent some general control algorithms from performing well at the non-equilibrium points or under model uncertainties. Hence, it is an arduous problem to develop a robust control algorithm which can not only control the helicopter's attitude precisely, but also has strong anti-disturbance and environmental adaptive abilities.
Up until now numerous types of control methods have been developed for small-scale helicopters, including classical, intelligent and vision control methods [1, 8, 14, 15]. A similar helicopter model has been established using the Langrage equation and a PID controller has been designed for attitude control [1–2]. It is generally known that PID is a classical linear control method and is not suitable for systems with model uncertainty and coupling characteristics. In other words, classical PID controllers only work well when all model parameters are constant. The sliding mode is also adopted to improve the tracking performance of the system and eliminate tracking errors [3–4, 14]. However, the sliding mode algorithm needs continuous switching logic which may lead to the chattering phenomenon. A 6DOF H-infinity decoupled controller has also been designed for a helicopter by separating it into two 3-DOF controllers, which takes the model uncertainty into consideration [5–6].
Recently, intelligent control methods have become popular as alternatives to conventional methods. Intelligent control methods can act efficiently with nonlinear and unstable systems. In general, the most used intelligent control methods are: fuzzy control and the neural networks approach. Furthermore, these techniques can be combined with each other or with conventional methods to become hybrid techniques. A fuzzy-gain schedule controller is proposed for stable and robust attitude control [8] and the controller is obtained from a real nonlinear helicopter platform. Nevertheless, we cannot neglect the fact that fuzzy controllers depend heavily on expert experience. A neural network-based adaptive output feedback control method is proposed since a neural network algorithm is capable of self-adaption, online learning and fault tolerance [7]. However, a neural network controller needs considerable training time and can easily fall into local minimum. These drawbacks decrease the effectiveness of the neural network algorithm.
Backstepping is an effective technique based on Lyapunov theory to design control algorithms for under-actuated systems. The key idea behind the backstepping design technique is that some virtual control inputs are introduced to counterbalance the number of inputs and outputs [9]. Recently, some modifications have been proposed to improve the capability of the backstepping algorithm. A combination of integral action and backstepping algorithm is presented in [10] and the goal is to combine the advantages offered by the backstepping algorithm and integral action. Another modification is the addition of adaptive action [11, 12], in which some estimation and compensation methods for model uncertainty are applied to overcome the drawbacks of the backstepping algorithm.
The main contribution of this paper is that an adaptive integral backstepping control algorithm for a 3-DOF helicopter is proposed and validated. An important feature of the proposed algorithm is its ability to preserve the robustness of backstepping, eliminate the static error by the integral action and estimate the model uncertainty by the adaptive actions. To prove the capabilities of the proposed control algorithm, it has been simulated as a model in the loop using MATLAB/Simulink. Furthermore, it is implemented on the Quanser's 3-DOF helicopter to show the good performances under model uncertainty and satisfactory tracking ability. This paper is organized as follows: in section 2, the dynamics model of the helicopter system is given and the adaptive integral backstepping controller for elevation motion is designed. Simulation and experiment results are shown and analysed in section 3. The conclusion and future works are finally given in section 4.
2. Design of Adaptive Integral Backstepping Controller
The 3-DOF helicopter control system consists of two propellers driven by DC motors on one end of the arm as shown in Fig.1(a). Two motor axes are parallel and the thrust vector is normal to the frame. The two motor voltages are considered as the control inputs of the system. Two voltage amplifiers are used to realize the control action in the system. A counterweight which acts as a counterbalance to the helicopter system is equipped on the other end of the arm. Fig.1(b) depicts a physical model of the 3-DOF helicopter. As shown in [13], using Euler–Lagrange function the dynamic model of the helicopter can be described as:

The system dynamics is rewritten as the following state-space function with two inputs and three outputs:

where

and the state vector is defined by
From Equation (2) we can conclude that the 3-DOF helicopter is a strong coupling, nonlinear and under-actuated control system with model uncertainties. The general control algorithm cannot obtain a pleasing performance when the mass of the counterweight is varying, therefore, adaptive control methods are used to estimate and compensate the model uncertainties.

Benchmark experimental platform of 3-DOF helicopter
The control objective is to design an effective control algorithm to track and regulate the elevation, pitch and travel angles of the 3-DOF helicopter. Our control scheme is shown in Fig.2. The cascade control architecture is constructed since the 3-DOF helicopter is an under-actuated control system. The elevation and travel controllers are designed as a primary controller and the pitch controller is designed as a secondary controller. Since the mass variation of the counterweight mainly influences the elevation control loop, an adaptive integral backstepping algorithm is used to design the elevation controller; the other controllers are still designed using the integral backstepping method.

Cascade control architecture
2.1. Integral Backstepping Control
From the dynamic model of the helicopter it can be seen that all of the three differential equations can be described as the following equation:

Define two tracking errors

The setting value of

where parameter χ indicates the integral of tracking error

And we can obtain:

When

Construct a Lyapunov function as follows:
The derivative of V is:

Based on the Lyapunov theory, the system can keep stable when
where
2.2. Adaptive Integral Backstepping Control for Elevation Motion
The proposed integral backstepping method can perform well in general situations, however, when the mass of counterweight is varying, this method cannot get a satisfactory performance. Since the real value of

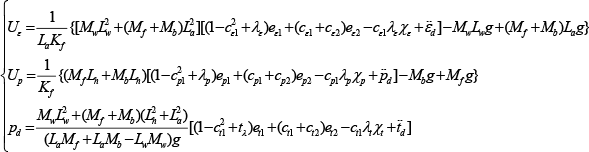
The control input of elevation loop can be rewritten as:

Take (13) into (7), the derivative of the angle velocity tracking error is:

Construct a Lyapunov function:

The derivative of V is:

In order to make system stable, choose

Then we can obtain:

3. Simulaiton and Experiment Results
In this section the proposed algorithm is compared with both integral backstepping and PID control algorithms by simulation and experiment implementations. Our work focuses on following three aspects:
(i) The control stability of the system. Though the stability of the control system has been theoretically analysed, it is necessary to give some validations by experiments.
(ii) The tracking ability of the system.
(iii) The adaption effect of estimating the model uncertainty.
Both simulations and experiments centre on the three interesting aspects. Firstly, we test the dynamic performance of step response. Then, different signal inputs are used to test the tracking performance of the proposed algorithm. Furthermore, the adaptive capability is compared by varying the mass of counterweight. The main initial conditions of the helicopter are given as follows:
Initial attitude of the helicopter (deg): [x10,x30,x50] = [−27.5, 0, 0]
Initial mass of the counterweight (g): 1830
Sample time (ms): 1
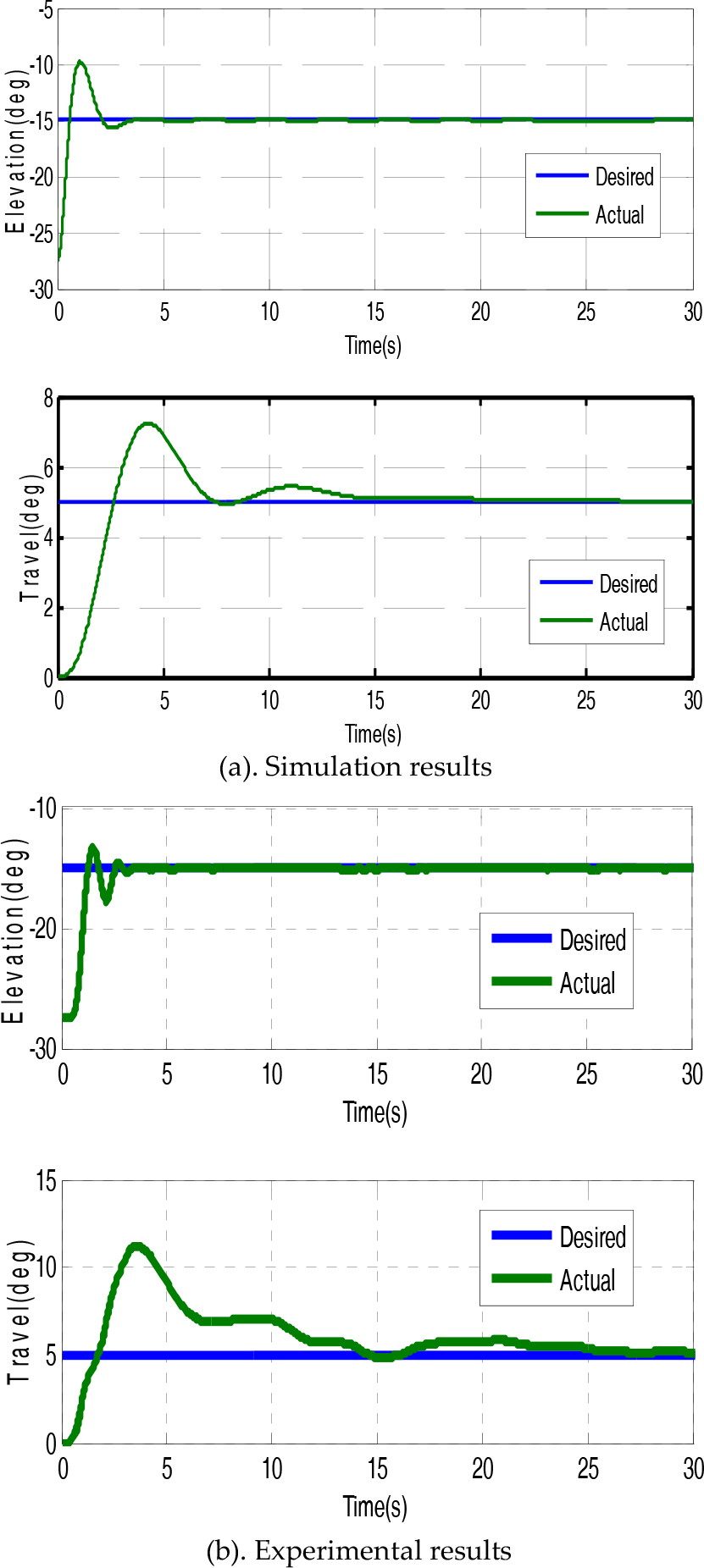
3.1. Step Response Result Comparison
In the following experiments, the dynamic and static performance of the adaptive integral backstepping controller is compared with the PID controller and integral backstepping controller when the control inputs are step signals. Fig. 3, Fig. 4 and Fig. 5 depict the simulation and experiment results of the three control algorithms respectively. From the figures we can see that the dynamic performance of elevation motion using adaptive integral backstepping controller is much better than the others. The reason for this is that adaptive actions have been applied to the integral backstepping algorithm in elevation motion.

Step response of PID

Step response of integral backstepping
Step response of adaptive integral backstepping
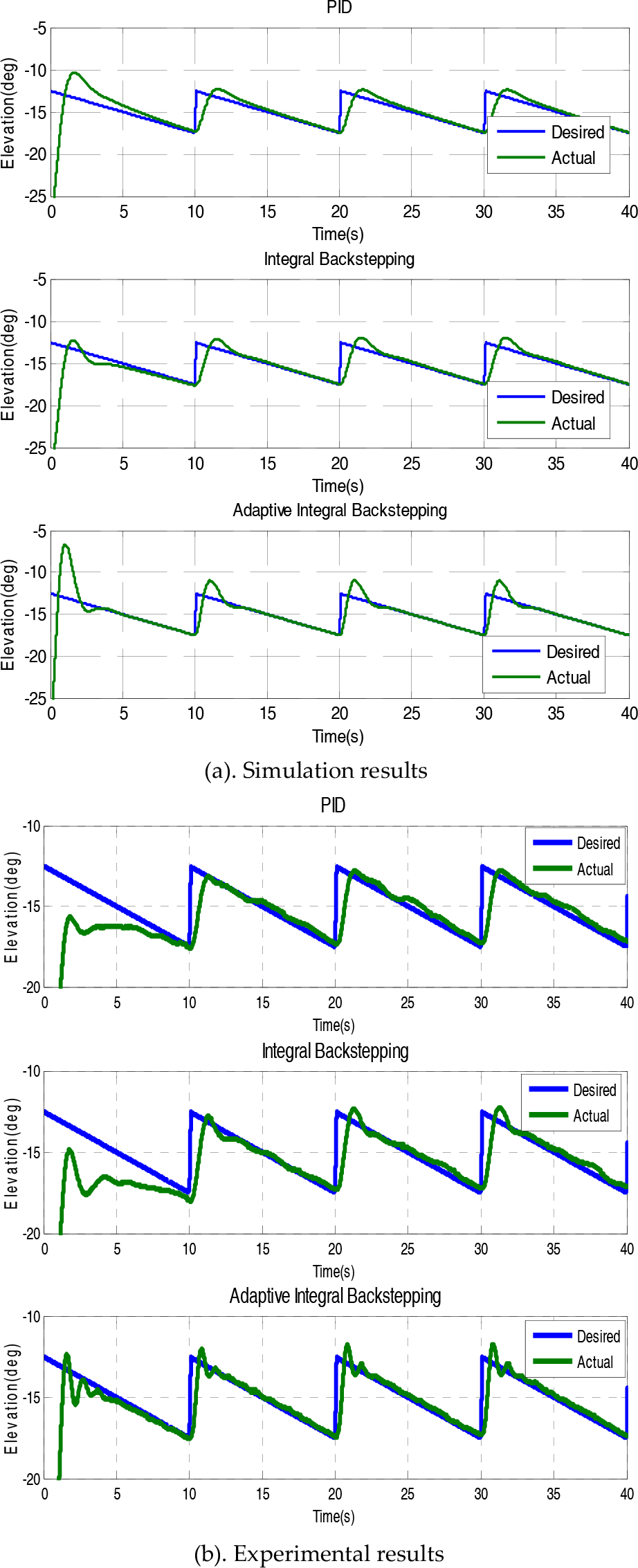
3.2. Tracking Performance Comparison
The following task is to test and compare the tracking ability of the three controllers. Fig. 6 and Fig. 7 show the control performance of elevation motion using three control algorithms given sawtooth and square signals respectively. From the experiment results, it can be seen that the adaptive integral backstepping control algorithm gives better response speed.
Tracking performance for sawtooth inputs

Tracking performance for square inputs
3.3. Mass Variation
In this section, the mass of counterweight is changed to examine the compensation and estimation performance of the proposed algorithm. A 200g object is hung on the helicopter at 10 seconds and 30 seconds, and is removed at 20 seconds. From Fig.8, it can be seen that the PID and integral backstepping algorithms cannot realize good dynamic response in the elevation motion when some uncertainties exist in the model, but the adaptive integral backstepping algorithm has excellent performance. The estimated mass value of the system is shown in Fig.9. As we can see, the estimated value is very close to the real value.

Elevation control of three control algorithms when the mass is changed

Mass estimation
4. Conclusions and Future Works
In this paper, an adaptive integral backstepping algorithm has been proposed to realize the attitude control of a 3-DOF helicopter. Simulation and experiment results validate that the integral action can eliminate the tracking errors of the system and the adaptive action can estimate and compensate the model uncertainty effectively. The proposed algorithm can reduce the overshoot and improve response speed. In the future, the proposed control algorithm will be tested on other similar experiment platforms.
Footnotes
5. Acknowledgments
The author wants to thank the State Key Lab of Synthetical Automation for Process Industries (SKL) and the Fundamental Research Funds for the Central Universities under Grant No.N100408003, National Science Foundation of China under Grant 61040014 and the Applied Basic Research Fund of Shenyang Municipal Science Technology Project under Grant No.F10-205-1-50 for the support on this project.