
Abstract
In order to meet the actual requirements of nuclear radiation and chemical leak detection, and emergency response, a new small teleoperated robot for nuclear radiation and chemical detection is proposed. A small-size robot is manufactured according to technical requirements and the overall structure and control system is described. Meanwhile, based on the principles of human-robot interaction, a user-friendly human-robot interaction interface is designed to provide a good telepresence for the operator, helping the operator to perceive and judge the robot's situation to better assist in making the right decisions and in giving timely operation instructions. The experiment results show the robot system operates reliably and meets the technical requirements.
1. Introduction
Because of their threat of covert, persistent destruction nuclear radiation and chemical agents have been the preferred means for various terrorist attacks [1]. The results of the nuclear radiation caused by terrorist attacks will be huge casualties and decades of persistent radiation hazards. On the other hand, the global nuclear power industry is developing rapidly. On March 11, 2011, a massive earthquake and tsunami hit eastern Japan, particularly affecting the Tohoku Sea, causing heavy casualties and property losses. To make matters worse, Fukushima Daiichi Nuclear Power Station was also damaged and the resulting meltdown and release of radioactive material became a global disaster.
In response to a nuclear and chemical terrorist attack or a nuclear leakage accident, the first disaster response mission is to check on the damage to the target environment, including dose measurements at the disaster site. However, the site is very dangerous for humans because of the potential for high radiation exposure. Therefore, there is great need to develop a small teleoperated robot for nuclear radiation and chemical detection, and emergency response, with the capability of adaptation to a variety of complex hazardous environments, high flexibility and a long control distance [2, 3].
In the Fukushima Daiichi Nuclear Power Station accident, some types of rescue mobile robot [4] were redesigned in response to the nuclear accident. For example, a rescue robot called Quince [5] was redesigned for practical use in search and rescue missions. Packet 510 and Warrior 710 designed by iRobot Company entered Japanese disaster areas equipped with nuclear and chemical sensors, which finally detected successfully the radiation level of the internal unit. In these practical applications of robot response to nuclear leakage accident, it can be seen that those mobile robots are all redesigned for disaster response missions and there are no specific robots for nuclear radiation and chemical detection.
In this paper, a new small teleoperated robot for nuclear radiation and chemical leak detection is designed. The following issues will be key considerations:
(1) In order to enter nuclear radioactive and chemical contaminated areas to avoid unnecessary casualties, teleoperation technology will be utilized. Meanwhile, the teleoperated robot returns all of the measured data, voice, images and other sensor information in real-time, providing a basis for mission command and decisions.
(2) The robot must be equipped with nuclear radiation detection devices to detect the radiation level and find the radioactive source or leak point.
(3) The robot must be equipped with chemical detection instruments to detect chemical agent contamination by means of teleoperation. Measurement data can be sent back through reserved serial port, USB, CAN in instrument module, or the display panel image of chemical detection instrument can be sent back through the video port reserved by the open instrument carrying module.
(4) The robot must be equipped with a manipulator and sample box to collect the contaminated sample to bring back for further testing and analysis.
(5) The robot must recycle radioactive sources and give an emergency response to toxic, hazardous, flammable, explosive or dangerous objects.
2. Structural design
A small teleoperated robot for nuclear radiation and chemical detection, and emergency response is composed of bodywork, a manipulator, nuclear and chemical detection instruments and a remote terminal according to its function and characteristics. The robot system requires an all modular design to facilitate the exchanges of equipment, system maintenance and function extension.
2.1. Mobile robot platform
The bodywork of the small teleoperated robot is shown in Fig.1. The bodywork is a crawler vehicle structure with two front arms, using a caterpillar movement mechanism. Caterpillar mechanism benefits from strong mobility and ground adaptability. The bodywork has a shock-resistant chassis and it is easy for the robot to climb stairs, run over general obstacles and go across rough terrain. Fig.2 is a schematic diagram of the full range rotation of the front arms.

Mobile robot platform

The full range rotation of front arms (schematic diagram)
2.2. Manipulator
A 5-DoF manipulator is developed as a vehicle manipulator to undertake to dangerous source and sample collection. The manipulator end with replaceable interface has good flexibility and expandability, and can not only sample solids and turn off the leaking valve, but also sample liquids. An arm camera points at the head, allowing manoeuvring in tight situations and enabling easier handling of objects.

Manipulator equipped on bodywork

Replacement components on the end of manipulator
In some particular instances the common gripper cannot complete tasks, to this end, the upgrade and replacement of the gripper part are given full consideration in the design of the manipulator. The gripper can be removed and replaced as a whole at any time when required, greatly increasing the diversity of specific tasks. Fig. 4(a) shows the gripper with variable angle for specially shaped objects. Fig. 4(b) shows the smart shovel used to sample powdery substances.
2.3. Nuclear and chemical detection instruments
In the research for a small teleoperated robot for nuclear radiation and chemical detection, there are as yet no integrated chemical detection instruments and those sensors that do exist are difficult to maintain and have a short life. So the mobile robot does not to configure a fixed chemical detection instrument and the robot is only equipped with internal nuclear radiation measurement devices to detect the gamma radiation level. To improve the capacity of nuclear and chemical detection, an open instrument carrying module is designed.
The module configures a group of 12V, 5V instruments power supply interface, serial communication interface, USB, CAN and a specific camera reading the meter measured by the nuclear and chemical detection instruments. With regard to the nuclear and chemical detection instruments with bus interface, the measurement results can be sent back to the remote terminal via bus interface. But with regard to those nuclear and chemical detection instruments without bus interface, the measurement results can be sent back to a remote terminal via a specific camera. The design is practical, feasible and reasonable. It can not only reduce the robot's inherent payload, but also flexibly expand its function.
2.4. Remote terminal
The remote terminal is the remote operation control part of the robot system and its main configurations are the PC, monitor, wireless communication module and input panel, as shown in Fig. 5. The remote terminal connects with the communication systems and receives data and images from the bodywork of the robot and manipulator. The movements of the bodywork and manipulator are controlled by commands through the joystick or buttons. The video display system can realize the three display modes: the single-screen display, four-screen display and image-in-image display. The robot can be hand carried and deployed by one person in less than one minute through a remote terminal.
The human-robot interface of the remote terminal is user-friendly. For the purpose of operation function clarity, the panel layout is planned based on function requirements, identifying each button using visual icons and text. In order to ensure operation actions are accurate and reliable under conditions of wearing protective equipment, large size, good tactile buttons and switches are chosen. This design can greatly reduce the chances of user error, improving the reliability of manoeuvrability.

Remote terminal
3. Control system
Due to the complexity of the functions of the small teleoperated robot for nuclear radiation and chemical detection, the system uses a modular structure to improve system reliability and enhance system scalability. So the control system is divided into three levels from high to low as shown in Fig. 6, and that is monitor and operation level, control level and devices level.
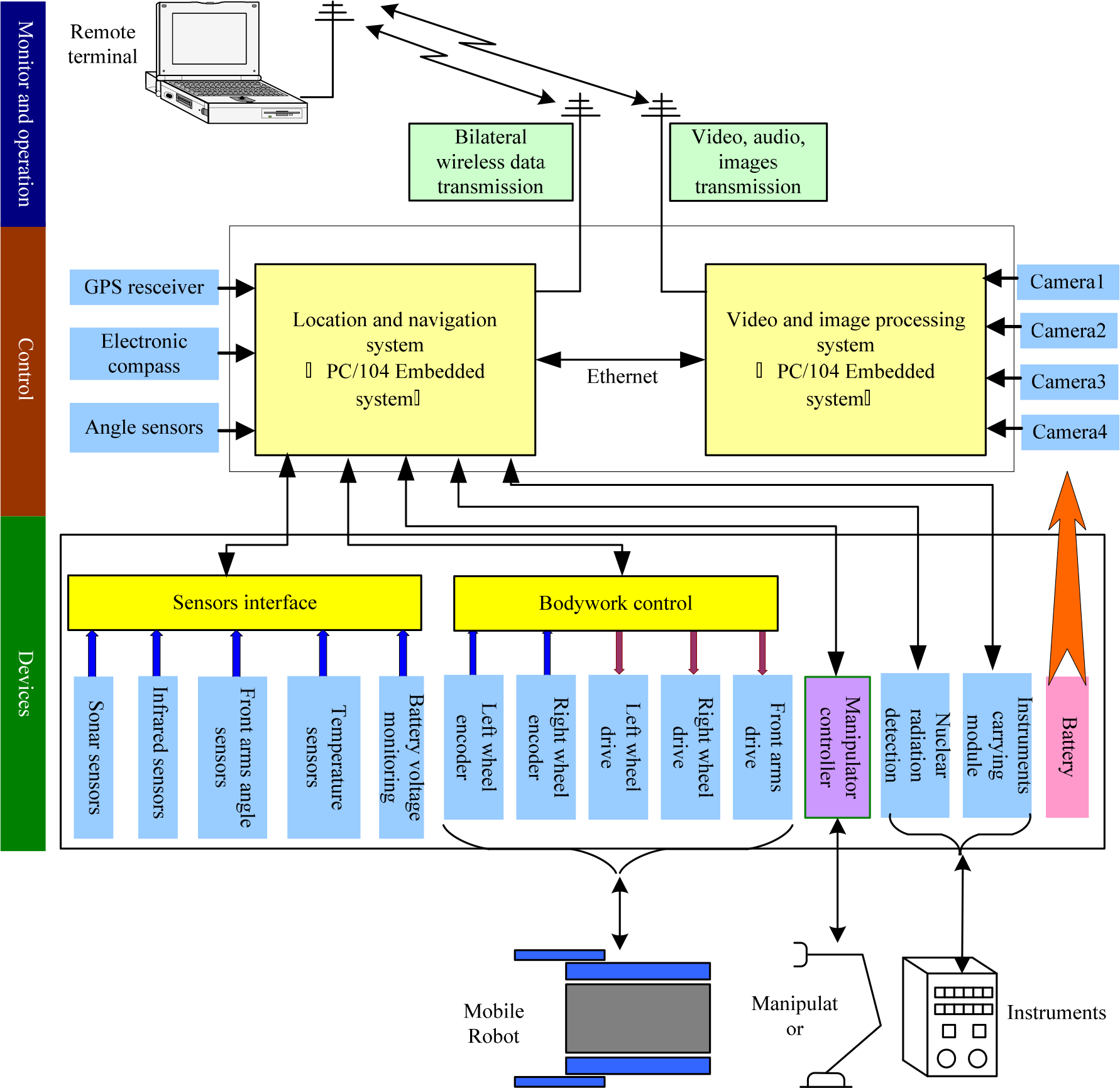
Control system
The devices level is composed of various sensors and instruments, the mobile robot bodywork controller, manipulator controller, bodywork motor drive controller and manipulator drive controller. The system BUS is utilized to support plug and play. Data can be transported via CAN, serial port and RS-485.
The control level is divided into two components, location and navigation system, and the video and image processing system. The location and navigation system includes the following aspects:
(a) the robot moves according to the posture of bodywork, environment parameters, navigation and position information, and the movement target.
(b) According to the manipulator operation commands from the operator, there is control of the manipulator to execute the operation action and coordinate the balance between manipulator and bodywork.
(c) Bilateral data exchange via remote terminal. The monitor and operation level is mainly a remote terminal. It keeps communication with the mobile robot through bilateral wireless data transmission and a wireless video transmission channel, monitoring the robot's movements and video images in real-time. The operator can also teleoperate the robot via the remote terminal and get feedback data from the robot.
4. Human-robot interaction design
The small teleoperated robot is used for detection, rescue, search and other purposes. As the robot is away from the operator when at work at a place that the operator cannot see, the operator needs to know information about the robot's environment, position and movement through a human-robot interaction interface. Meanwhile the robot can be controlled to detect nuclear radiation and chemical agents, and be navigated by the human-robot interaction interface [6, 7]. So human-robot interaction is a very important part of a mobile robot system, and research into human-robot interaction should be implemented throughout the entire process of robot system design [8, 9].
4.1. The design principles of human-robot interaction interface
According to the nature of the work of the small teleoperated robot, the design of the human-robot interaction interface [10,11] should obey five principles: security, integrity, professional, intuition and adaptability.
Security includes two aspects. The first is to ensure that the mobile robot will not harm the environment or harm people. When the robot enters situations with flammable or explosive gases or objects, its drive system must not produce electric sparks. The second is to ensure the safety of the robot itself. The robot should be able to bypass obstacles, determine whether it is close to fire or high temperature zones and avoid tipping over. So the human-robot interaction interface should have a security monitoring window, continually detecting the robot's situation to predict possible dangers.
Integrity contains the clarity of display and standard of information. The relevant information of the robot's real-time operation should be displayed on one screen, allowing the operator to grasp comprehensive information about the robot's environment, posture, direction and speed, minimizing the number of screen switching operations.
Professional means that the organization of human-robot interaction, the contexts of display, input device and input method should be determined based on the specific application of the robot. It is necessary to meet general requirements, but also apply to the professional application. For example, under conditions of wearing protective equipment, the size of the operation buttons must meet user requirements when wearing protective gloves.
Intuition means easy to understand and should guide how direction controllers like the steering wheel and joystick on the remote controller control the movement of the mobile robot. In the human-robot interaction interface, the layout, colour and meaning of operation buttons should be clear and visual as much as possible.
As the environment of the small teleoperated robot is varied, adaptability of human-robot interaction is very important. The work site may be bright or dim, wet or dry; maybe there is a strong electromagnetic interference. In addition, the environment of the operator and the posture of the operator may also be varied. All of these mean that the design of the human-machine interface needs to have environmental adaptability and reliability.
4.2. Human-robot interaction interface
The human-robot interaction interface is shown as Fig. 7. The human-robot interaction agent software realizes the function of human-robot interaction.

Human-robot interaction interface
4.2.1. Video/audio display agent
The video/audio display agent mainly receives and replays the video and audio data. Through the human-robot interface, the operator can use the ‘video setting' to set the video resolution parameters. The video display system can realize the three display modes: the single-screen display, four-screen display, image-in-image display.
4.2.2. Posture of bodywork display agent
The bodywork posture display agent uses graphic visualization and 3D animation to display intuitively the tilt angle of the bodywork, the movement direction of robot, the attitude of front arms, linear velocity and angular velocity of the movement, facilitating the operator to monitor the mobile robot's current work status. The bodywork attitude agent is shown in Fig. 8.
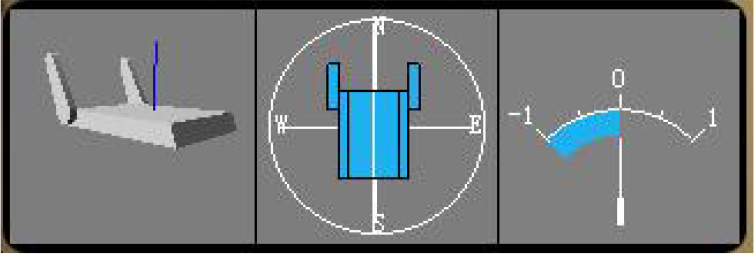
Bodywork attitude agent
4.2.3. Trajectory display agent
The trajectory display agent is a graphical method to display the trajectory of the mobile robot's motion. There are two ways to obtain trajectory data. One is in an outdoor environment, where the trajectory display agent connects to the GPS services of the robot and uses location data from GPS to draw the trajectory of the robot. The other is in an indoor environment, where the trajectory display agent connects to a odometer of the robot and uses the odometer to obtain the position in the local coordinate system. The trajectory display agent is shown in Fig. 9.

Trajectory display agent
4.2.4. Nuclear and chemical instrument agent
The nuclear and chemical instrument agent is key to nuclear radiation and chemical detection tasks, and this requires that the nuclear and chemical measurement data are displayed on the interface. Fig. 10 shows the nuclear and chemical instrument agent. The agent adopts an instrument form to display the measurement data, meanwhile it also provides an alarm threshold and a variety of alarm settings.

Nuclear and chemical instrument agent
4.2.5. Teleoperation agent
The teleoperation agent is used to control the motion of the mobile robot, supporting the joystick input mode. Fig. 11 is a teleoperation agent interface. The operator sends commands such as forward, backward and steering to control the robot through the joystick. The teleoperation agent also simulates graphically the direction of motion [10].

Teleoperation agent
4.2.6. Manipulator agent
The manipulator agent is control server software that controls the manipulator to grip, listen and observe closely. The remote operator sends commands to control the angle of each joint manipulator. After necessary format conversion, the manipulator agent sends commands to the manipulator controller.
5. Telepresence based on teleoperation
The greater the autonomy the robot has, the more information is needed to describe the environment. This means the robot could complete complex tasks in an unstructured environment, has a high flexibility and collaborates with operators. So a semi-autonomous robot with local autonomy through human-robot interaction teleoperation is one of the most important areas of robot research.
A semi-autonomous robot in conditions of human-robot interaction has the capabilities of local environment modelling, autonomous obstacle avoidance and local autonomous navigation. This robot is able to complete the tasks planned by operators and the operators are responsible for environment analysis, mission planning and global path selection. Through this method the robot completes the tasks assigned in collaboration with operators. A small teleoperated robot for nuclear radiation and chemical leak detection often works in an unstructured and harsh environment with high risk, so most specialized robots like this use semi-autonomous systems.
Through extensive research and experiments on small teleoperated robots for nuclear radiation and chemical detection using autonomous behaviour, it is realized that excessive autonomous behaviour in practical application will bring complexity of mission planning and operation, affecting the practical effects of the robot system. The design of autonomous behaviour and human-robot interaction interface are optimized for better application [12,13,14].

The chart of telepresence based on teleoperation
The results of robot experiments

Fig. 12 shows the chart of telepresence based on teleoperation. From the figure it can be seen that the operator is a core of the whole system, a ‘brain' and a decision maker. The robot is an extension of the senses of operator, which is a ‘trunk' and execution system. The operator sends the control commands through input devices such as a keyboard, control handle, joystick and buttons. Commands from input devices are sent to the robot to control precisely the status of the robot motion through a data radio. Each joint of the manipulator equipped on the robot is controlled accurately to perform the handling of objects. Data including status of movement, health condition and parameters of the environment are measured by sensors carried by the robot which is sent to remote terminal through a video radio and data radio. The operator can understand everything at the scene based on these data contents which are displayed on the human-robot interaction interface.
In the process of teleoperation, the most important thing is to provide a good presence for the operators [9, 10, 12]. Real-time images from the cameras fixed on the manipulator and the bodywork show the operator images of different angles around the robot to help the operator get the true feeling of scenes where the robot works and make accurate judgments. Telepresence helps the operator perceive and judge the robot's situation in order to make better decisions and gives timely operation instructions, resulting in better work efficiency of the small teleoperated robot.
6. Experiments
The relevant validating test, including unit performance test and system performance test, is implemented to assess whether the function and index parameters of the robot and its unit components are consistent with the design requirements. Based on the situation of the actual robot test and the test data, the bodywork and the instruments of robot perform well in application, there are many advantages with convenient operation, reliable execution, flexible movement, accurate instructions, user-friendly human-robot interaction interface and easy manipulation learning. The small teleoperated robot for nuclear radiation and chemical detection experiments are shown in Fig. 13.

Experiments of robot
7. Conclusion
This paper introduces a small teleoperated robot for nuclear radiation and chemical leak detection, and describes the overall structure, control system and human-robot interaction design. The robot can easily climb stairs, run over rubble and navigate narrow passages with sure-footed efficiency. The remote terminal replays real-time video, audio, detection data and other sensor readings while the operator stays at a safe distance. Through human-robot interaction using the interface the operator can view four images of the robot, allowing for precise positioning and providing a good telepresence. Meanwhile, in highly nuclear radioactive and strongly chemically contaminated areas, the robot detects the radiation level and recycles radioactive sources, in addition to producing an emergency response to toxic, hazardous, flammable, explosive or dangerous objects using a small manipulator. The experiment results show the robot system operates reliably and meets the technical requirements. Subsequent study will focus on self-protection in harmful environments and development of control system.
Footnotes
8. Acknowledgments
This paper is supported by the major innovation project of the Ministry of Education Training Funds Project (No. 708045).