
Abstract
Redundant manipulators offer a dual advantage of flexibility and dexterity and can be used in many civilian and military areas. However, operating such systems by teleoperation is challenging because of the redundancy and unstructured task environment, which result in the human operator suffering a huge burden when telemanipulator is facing the complicated obstacles. The existing methods usually use some off-line algorithms to solve the problem of obstacle avoidance. It is difficult for them to meet the requirements of real-time teleoperation in some unknown environment. This paper presents an on-line method for a telerobotic system to take advantage of redundancy to avoid obstacle, which is based on real-time sensor information. With this method, the human operator can focus attention on the end-effector operation regardless of the obstacle avoidance of other parts. The effectiveness and advantage of the method are well demonstrated by experiments.
1. Introduction
Telerobotic systems offer an attractive opportunity to combine human intelligence with robotic proficiency. In the last decade, the telerobotic systems can be used in critical and hazardous environments, including military, energy, space, and others. In order to improve the ability of interacting with the real world, the manipulators which possess redundant degree of freedom are introduced in the telerobotic system to deal with the various challenges such as obstacle avoidance, joint limits and better manipulability. Telerobotic control is different from the normal robotic control. The normal robotic control need path planning automatically, while the path of telerobot is planned by the command information provided by human operator. In general telerobotic systems, the human operator is saddled with two basic tasks: 1) moving the robot arm to its desired position, and 2) avoiding obstacles collide with the telemanipulator [1]. Practically, when disposing a grasping task by redundant telerobotic systems, human operator only focuses attention on the end-effector to track the command trajectory, while movement of other links of manipulator are usually ignored and in unsupervised situation. In other words, it is difficult for human operator to control all links of manipulator to avoid obstacles, especially in a complex environment. Hence, the links with the risk of collision should have the ability to automatically avoid collision. The previous researches for the collision avoidance of robotic system refer to a structured environment, so the solution is based on off-line in most cases. However, due to the variable environment, the telerobotic system needs the on-line ability to avoid the collision in order to ensure the security of manipulator. In order to reduce the burden of human operator, therefore, there are two practically difficult problems need to solved. One is that the telerobotic system has to detect the obstacle and judge the possibility of collision in real-time; the other one is the telerobotic system need a suitable scheme to avoid obstacles efficiently. The redundant telemanipulator leads to infinite possible joint positions for the same pose of the end-effector. Accord- ingly, this naturally leads to the research that a robot can achieve a primary task with its end-effector and simultaneously satisfy certain requirement with the supplementary degrees of freedom. In this paper, an obstacle avoidance approach based on an equipotential surface is proposed for a 7-DOF robot manipulator in telerobotic system, which takes advantage of redundant freedom of robot manipulator to achieve obstacle avoidance, and results of relative experiments are illustrated. The rest of this paper is organized as follows. The relevant research is discussed in Section II, which is followed by the control architecture of our telerobotic system in Section III. We present the sensor-based obstacle avoidance is studied in Section IV. In Section V, experimental results are presented to demonstrate the efficacy of the proposed algorithms. Finally, conclusions are made in Section VI.
2. Related research
Traditional researches related to robotic obstacle avoidance strategies can be divided into reactive control, global planning and mixed approaches [2]. The fact that real robotic systems rarely have an exact description of the environment, coupled with a desire for real-time planning, led to the development of reactive control approaches. Reactive control approaches are mainly based on potential field methods that rely on local information [3, 4]. The drawback of reactive control is that the robot might get stuck in a local minimum. In teleoperation, however, because of the path planning by human operator, the above problem could be solved. Hence, the reactive control is fit for teleoperation. Global planning approaches on the other hand take global information into account. These methods focused on the robot operated in the invariable environment, such as development of the PRM planner [5, 6]. Due to the assumption of a static environment and poor ability of real-time, global planning approaches are not applicable to telerobotic system in unknown environment. After the reactive control and global planning, various mixed method were proposed. Elastic Bands [7] and Elastic Strips [8] are mixed method, which combine global information and local one. Initially, they made a planned path, and then the path is adapted to a changing environment which uses reactive control. However, calculating distances from the robot to a point cloud might be time consuming. Dynamic Roadmaps (DRM) introduced by Leven and Hutchinson [9] adopt the method of increasing on-line efficiency through preprocessing from classical PRM approaches to plan path in changing environments. Due to adapting the classical PRM to get a preprocessed roadmap, DRM still relies on preprocessing to enable real time plan. In other word, DRM also need preprocessing, hence it is not suitable for teleoperation. Especially, some researches on obstacle avoidance for telerobot in Jet Propulsion Laboratory were more professional [10, 11, 12]. Due to the specific characteristic of telerobotic system, the global path planning is controlled by human operator, the idea of reactive control is more suitable for telerobot to avoid obstacles. Seraji introduced configuration control for redundant robot [13], and then he proposed the virtual spring-plus-damper method with proximity sensor to implement the security of robot based on configuration control. Nonetheless, because the cost of proximity sensor is too high, this method which measure the distance from robot to the obstacle is unsuitable for normal telerobotic system. Instead, our approach uses general visual sensor or range sensor. Additionally, our focus is on avoiding collision as in real time as possible. The contributions in our work are: (1) a method based on equipotential surface is proposed to calculate the distance from the robot to the obstacle. (2) a control scheme taking advantage of redundant degree of freedom is presented to achieve obstacle avoidance.
3. Control architecture
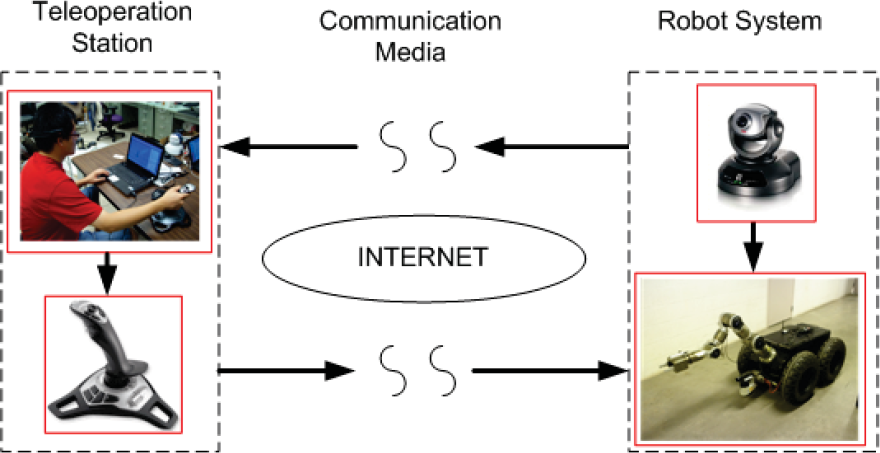
In general, a telerobotic system can be represented by the block diagram in Figure 1 and consists of five subsystems: the human operator, the master, the communication media, the slave (telemanipulator), and the environment [14]. The human operator provides a position/velocity and force command, through the master, communication media, and slave, to interact with the environment; likewise, the information sensed at the environment is transmitted backward through these blocks, to the operator [15]. This is a bilateral process.

Concept map of the telerobotic system
In this paper, we construct a telerobotic system, which consists of three parts: teleoperation station, communication media and robot system, as shown in Fig. 2. The teleoperation station includes the human operator and the master, where the joystick is used as master. The communication media is the Internet. The telerobot system is composed of a mobile manipulator and a sensor system. The mobile manipulator is the executor that implements the mission, which contains a 4-wheel mobile base and a dexterous 7-DOF arm robot, which exist one redundant joint for the task 6-DOF task- space control. In other words, there are infinite different arm postures which yield the same end-effector configuration. In this paper, the kinematic control of manipulator is to employ the configuration control method proposed in [13]. The sensor system is used to detect the information of environment. In the control process, the human operator sends the six dimensional velocity commands to the end-effector, through the Internet to the remote robot system. Then, the robot system responds to implement the task. The end-effector of manipulator is supervised by human operator, which ensures the collision avoidance. At the same time, the sensor system detects the information of task space in real-time and controls the links of manipulator to achieve collision avoidance autonomously. Next, we introduce the proposed method in detail.
Architecture of the telerobotic system
4. Sensor-based obstacle avoidance
In this section, the method of sensor-based obstacle avoidance is discussed. The aim of this method is to make telemanipulator accomplish collision avoidance automatically through a sensor.
4.1. Modeling of the manipulator
The configuration control, which is also called the ‘augmented Jacobian method', is used in modelling the manipulator in this paper. For the 7-DOF redundant manipulator in Figure 3, let


where


where

where

where

Model of 7-DOF manipulator

Arm angle
4.2. Sensor system
The information we need is the 3D shape data of the obstacle in the environment, so it is feasible for any kind of sensor or combination of several sensors as long as they possess the ability to obtain 3D information of obstacle, such as stereo vision, 3D laser measurement sensor, and others. Before detection, the coordinate frame of sensor system needs to be calibrated with the base coordinate frame of robot system. Calibration gives all necessary parameters which relate the sensor system frame

where

where

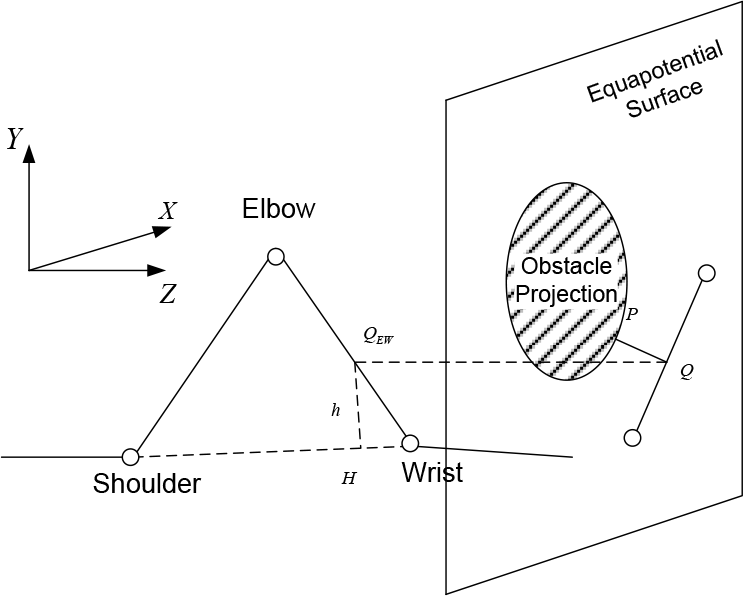
Equipotential surface

Obstacle and forearm are projected on Equipotential surface

The result of laser detection
4.3. Obstacle avoidance scheme
The obstacle avoidance scheme was inspired by the idea of artificial potential field [3]. Because the control is based on velocity, the link of manipulator needs to get velocity value to avoid obstacles. In other words, the link of manipulator would keep away from the obstacle at a certain speed in a artificial potential field. Additionally, there are following properties in projection method: 1) When the projection of link

Distance relation between the link projection and the obstacle projection
Thus, there is a double layers protection for the arm.

where

where K is an user-specified proportional coefficient. Note that the direction of

Therefore, the virtual velocity

Note that the virtual velocity is zero when

In this way, the forearm link of the telemanipulator can implement a teleoperation task safely.
Radius of rotation h
5. Experiment
To perform the experiment, a 7-DOF manipulator named LWA3 which is produced by Schunk Company was used. The LWA3 manipulator is controlled by a configuration controller which ensures that end-effector tracks user-specified trajectories to catch a target. During the manipulation, the human operator only focused on the motion of end-effector, while the detection system continuously computed the distances between the forearm link projection and the obstacle projection. The obstacle avoidance strategy was implemented in the real-time controller so that the forearm link was always in safe situation. There were two experiments to illustrate the effectiveness and real-time ability of the proposed method respectively.
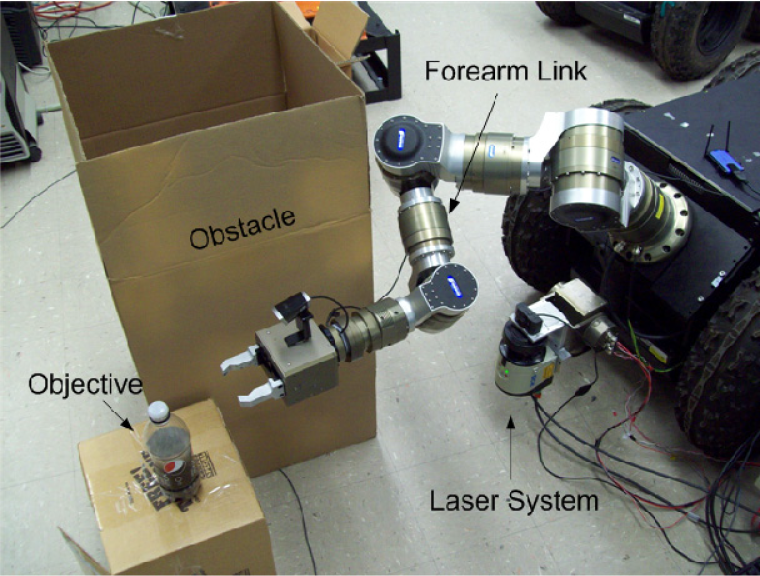
Experiment Setting
Let
5.1. Experiment 1 — Obstacle is still
The goal of this experiment is to demonstrate the effectiveness of the proposed method. In the experiment, the end-effector is commanded to move forward, namely x-axis direction, and the obstacle is in the front of forearm link

X-axis velocity of end effector
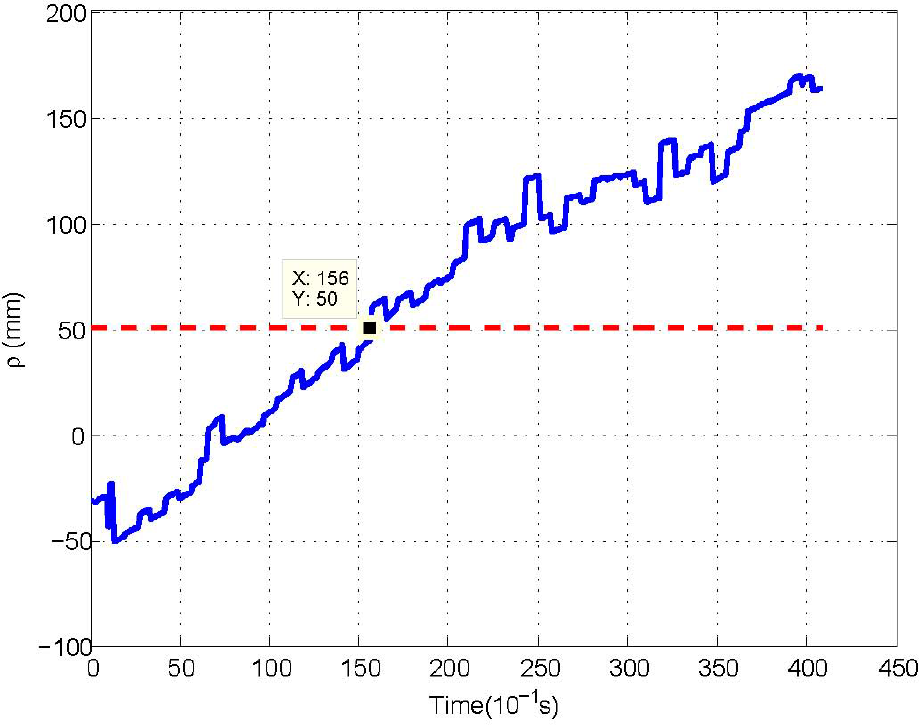
Closest distance between the forearm link and the obstacle
Angular velocity of arm angle

Process of collision avoidance (sampled every 5s)
5.2. Experiment 2 — Obstacle is mobile
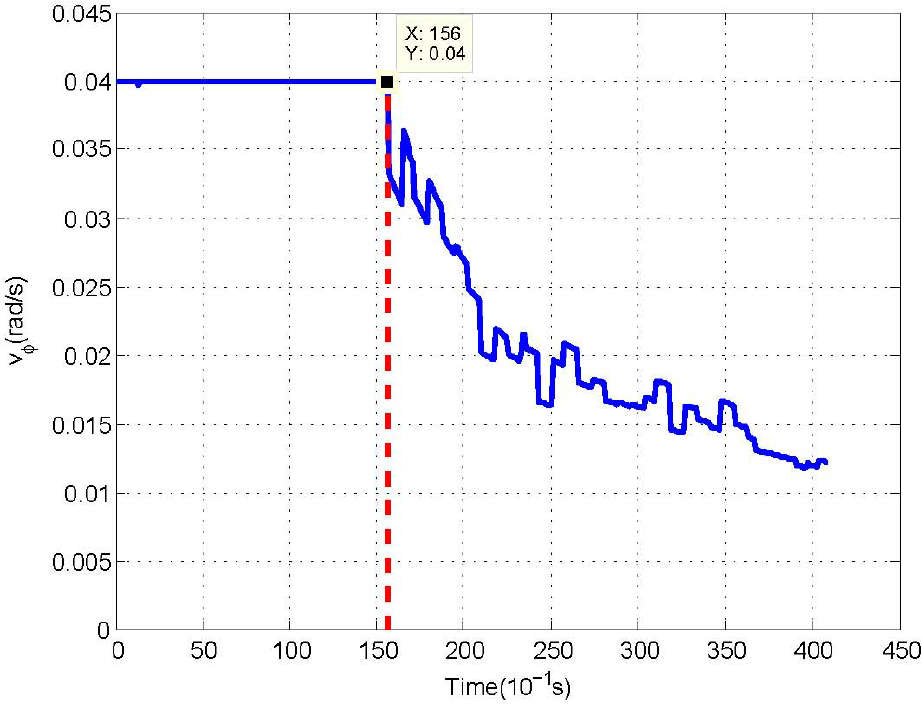
In this experiment, the aim is to demonstrate the real-time ability of the proposed method. We made the obstacle keep moving in the front of forearm link randomly, namely changed the ρ randomly and checked the response of the angular velocity of arm angle. Similarly, the human operator sent task space command of the end-effector in x-axis direction of the base frame, then the angular velocity of the arm angle was autonomously calculated based on the sensor information. Figure 15 shows the velocity command of x-axis direction in this experiment. The value of the blue real line indicates end-effector keep moving forward in x-axis direction. Figure 16 indicates the change of ρ (the red dashed line indicates
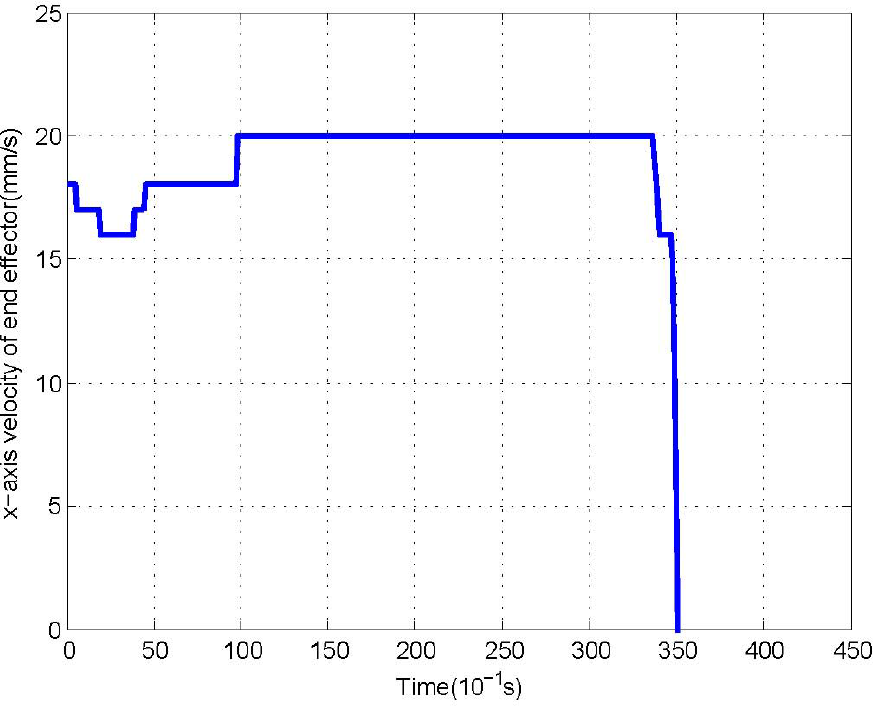
X-axis velocity of end effector
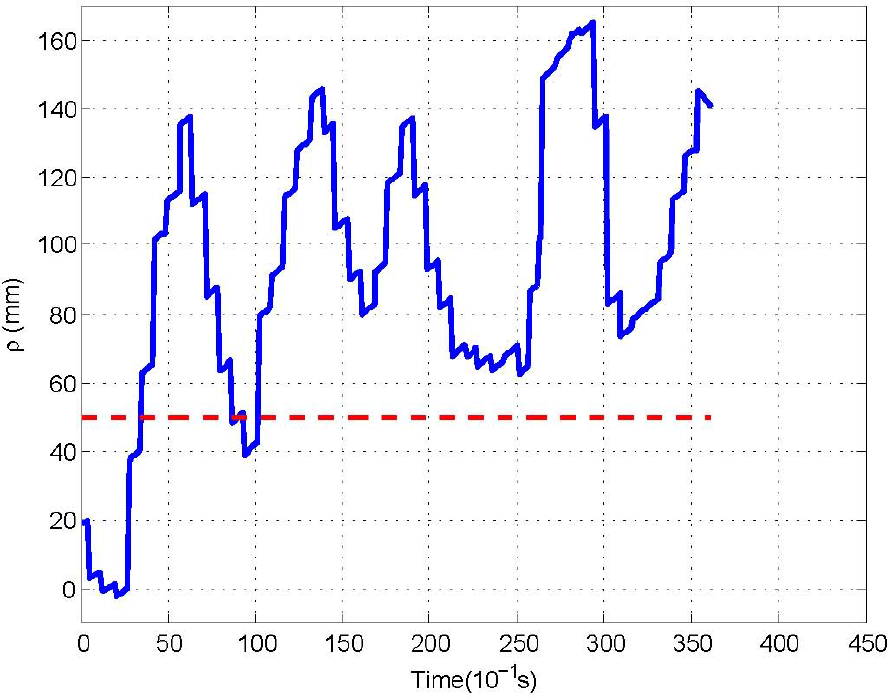
Closest distance between the forearm link and the obstacle

Angular velocity of arm angle
6. Conclusion
The autonomy and real-time ability of collision avoidance are the important problem in the telerobotic system. A new approach based on real-time redundancy resolution of dexterous 7-DOF manipulator is developed and demonstrated in this paper. First, the projection method is used to judge the proximity between the link of manipulator and the obstacle by the real-time sensor information. Then the virtual velocity at the redundant arm angle is employed to implement the collision avoidance. The two supportive experimental results are presented and illustrate the effectiveness and real-time ability of the proposed method respectively.
Footnotes
7. Acknowledgments
This work was supported by Major Projects of the Ministry of Education (No. 708045), Key Project of Jiangsu Province Natural Science Foundation (No. BK2010063), Sci. and Tech. Project of Changzhou (No. CE20100022).