
Abstract
Following the law of attraction in human-human interaction, this paper examines the effects of a robot's personality and a human's personality in various human-robot interactions. This study was conducted using robots that were programmed to mimic both extroverted and introverted personality types, as well as humans who were classified as having introverted, extroverted or intermediate personality types. Using a 3 × 2 between-subjects experiment with 120 participants, the results indicated that participants who interacted with a similar personality robot were more comfortable than those who engaged with a different personality robot. Yet, the evaluation of social presence presented an opposing result. Both the implications and limitations of the present study, as well as guidelines for future research, are discussed.
1. Introduction
With the rapid advancement of robotic technologies, many robots have been developed in order to socially interact with humans. In order to determine the effect of a robot in human-robot interactions, some studies have tried to define a social robot. For example, Breazeal noted that a social robot should have a physical embodiment [1]. Moreover, it must autonomously communicate and interact with humans. In fact, Fong and colleagues mentioned that the interaction skills of socially interactive robots are more important than those of robots with other purposes, such as industrial robots [2].
Consequently, to develop better socially interactive robots, in depth considerations of the various types of users are needed. For instance, age and gender, which are representative individual variables, may affect people differently when they interact with social robots [3, 4]. In particular, a user's personality may be one of the most important factors in human-robot interactions with social robots. In human-human interactions, the personalities of each human can affect the relationship satisfaction and each human's perception of the other [5, 6]. Studies by Mann and Blankenship et al. found that individuals prefer to interact with people who have personalities similar to their own [7, 8]. Many studies have confirmed this tendency in various relationships and environments, including friendships, social relationships and relationships in collaborative working environments [6, 9–11]; yet, only a few studies have attempted to determine the effect of personality on human-robot interactions. Hence, this study presents the following research questions:
Research Question 1: For humans in human-robot interactions, controlling for the time spent and the content involved in the communication, what is the relationship between the human's personality (independent variable) and his or her immersive tendency, anthropomorphism, friendliness, preference and social presence (dependent variables)?
Research Question 2: For humans in human-robot interactions, controlling for the time spent and the content involved in the communication, what is the relationship between the robot's personality (independent variable) and its immersive tendency, anthropomorphism, friendliness, preference and social presence (dependent variables)?
To answer these research questions, it was necessary to precisely define the type of interaction with the robot. Hence, the study focused on facial communications with a facial expression robot. As mentioned above, a physical embodiment and personal communication are essential functions of socially interactive robots [1]. Accordingly, in this study the facial expressions and interactions of the human and robot were emphasized [3, 12–14]. Note that many studies have focused on the effects of facial expressions in human-robot interactions since they are not only expressions of emotions, but also a representation of personality [13–16].
This paper is organized in four sections. The first section reviews previous literature and the section following describes the research method. Then, the analysis and conclusions of this paper are presented. Finally, the limitations and future studies are discussed.
2. Literature Review
2.1 Personality
Personality is a set of distinctive and unique characteristics among humans. In fact, Goldberg indicated that the personality of an individual is composed of five core domains, including openness, conscientiousness, agreeableness, extraversion and neuroticism. He called these five factors the “Big Five” personality traits [17]. Among these domains, extraversion is one of the most well-exposed and impressive factors defining a human's personality. It characterizes an individual via his or her sociability, excitability and other emotional expressiveness. In addition, many studies have indicated that a person's level of extraversion can be directly associated with his or her social aptitude in various relationships [18].
In human-human interactions, the level of extraversion can be distinguished by two extremes – extroverted versus introverted. If a person is extroverted, he/she will be relatively gregarious and generally energized by external stimulus or people. On the contrary, if a person is introverted, he/she will be comparatively less sociable and more introspective. As a result, introverted people tend to have fewer relationships than their extroverted counterparts [18–20]. These tendencies are relevant since many studies have indicated that social rules in human-human interactions may equally apply to human-computer interactions or human-robot interactions. Based on the ‘Computers Are Social Actors’ (CASA) paradigm, which was proposed by Nass and his colleagues [21–25], if computers and robots are able to communicate with humans, humans will respond to these computers and robots using the same elements of social interactions that they employ in human-human interactions.
2.2 Facial Communication with Personality
In social interactions between humans, two types of communication – verbal and non-verbal – are utilized to deliver information, emotion and intention [26, 27]. Usually, verbal communication is used to deliver the purpose and detailed information of the interaction. In contrast, non-verbal communication is used to support the verbal communication, often by conveying the information in a more subtle manner. In non-verbal communication, messages are communicated via gestures and facial expressions [26, 27]. Several previous studies have indicated the powerful effects of non-verbal communication in human-human interactions [28–30]. For example, Tojo et al. found that non-verbal communication, including facial expressions, played a crucial role in interactions with others. Additionally, they found that suitable non-verbal feedback also played an important role in improving the performance of communication [31].
Owing to the inherent characteristics of non-verbal communication, it is often limited to face-to-face situations [26, 30, 32]. In particular, the two principal modes of non-verbal communication in face-to-face situations are eye movements and facial expressions. By using these two mechanisms effectively, a person can deliver and receive social information, such as emotions or moods [31, 32]. However, these mechanisms can vary for different personalities. For example, extroverted people more actively form social relationships using facial communications (e.g., facial expressions, eye movements), while introverted people are less likely to do so. Moreover, extroverted people outwardly express their emotions more easily than introverted people. Given these inclinations, extroverted people tend to use facial communication more effectively than introverted people [33]. However, few studies examine the effects of personality in human-robot interactions.
3. Method
3.1 Design
A between-subjects experiment was conducted with six conditions representing a fully-crossed (3 × 2) factorial design. It features three levels of participant personalities (Extroverted vs. Intermediate vs. Introverted) and two personality modes in a facial expression robot (Extroverted vs. Introverted).
3.2 Participants
One hundred and twenty undergraduate and graduate students were recruited from a large private university in Seoul, South Korea. The mean age of the participants was 24.9 years (SD=4.22) ranging from 19 to 32 years. 50% of the participants were female. To measure the level of each participant's extroversion, all participants took part in an online pre-questionnaire adapted from previous studies [34–36]. They responded to each item by marking on a 7-point Likert scale ranging from 1 (Introverted) to 7 (Extroverted), then the participants were divided into two groups. The mean score of the participants classified as “introverted” was 2.7 (SD=0.44). The mean score of the participants classified as “intermediate” was 4.5 (SD=0.55) and the mean of the participants classified as “extroverted” was 5.9 (SD=0.77). Each personality category had 20 participants (10 females and 10 males). All participants were assigned by the results of the pre-questionnaire and paid about 4 US dollars.
3.3 Apparatus and Materials
A facial expression robot (KMC-EXPR) designed by Inplus Inc. was used in our experiment (Fig. 1). Most of the functions and parts of the robot were very similar to the Kismet robot, albeit without any ears. It had a mouth, lips and eyes similar to humans. By controlling the elements of its face, it was able to make various facial expressions.

A facial expression robot in our experiment.
3.3.1 Extroverted situation of a facial expression robot
In order to convey an extroverted personality via its facial expressions, the robot was programmed to make positive and active communications. Following the characteristics of extroverts shown in Table 1, the robot opened and moved its eyes and mouth in a more exaggerated fashion than average. Also, it directly gazed at a participant during their interaction. Its neck was always directed toward the participant. In addition, the robot directly responded to the participant's actions.
Properties of facial communication.

3.3.2 Introverted situation of a facial expression robot
In order to convey an introverted personality via its facial expressions, the robot was programmed to create passive communications. Following the characteristics of introverts shown in Table 1, the robot initially did not react to the participant, after which it only gazed at the participant. Finally, it imitated the facial expressions of the participant. In contrast to the extroverted mode, the robot opened its eyes and mouth less wide than usual. It also tended to avoid the participant's gaze, however, it sometimes caught a glimpse of the participant's face.
3.4 Procedure
Upon arrival at the laboratory, an experimenter gave each participant a book that was composed of many independent, often humorous stories. After reading the book, the participant selected a story from the book that he or she felt was the funniest. Then, the participant was invited into the experiment room and was seated in front of a facial expression robot at a distance of 0.7 metres. The participant was instructed to read the story to the robot. The purpose of the experiment was blinded.
After the experiment had concluded, the participant was asked to fill out an online questionnaire, which included items regarding his/her assessment of the immersive tendency, anthropomorphism, friendliness, preference and social presence of the robot.
3.5 Measures
The measure of immersive tendency used in this study (Cronbach's α=.88) was an index composed of seven items adapted from [37]. Likewise, the measure of anthropomorphism (α=0.91) was an index composed of nine items adapted from [38]. The measure of friendliness (α=0.82) was an index composed of eight items previously used by [39, 40]. The measure of preference (α=0.84) was an index composed of three items adapted from [21] and the measure of social presence (α=0.89) was measured by an index composed of seven items previously used by [33].
4. Results
A series of 3 × 2 factorial analyses of variance (ANOVA) was conducted to analyse the effects of personality – both the robot's and the human's – on the dependent variables, followed by post-hoc analyses using Student's t-tests.
The results from the ANOVA and a subsequent post-hoc analysis indicated that the extroverted participants (M=5.53, SD=0.98) reported a significantly higher degree of friendliness in the robot than the intermediate (M=4.78, SD=1.19) and introverted participants (M=4.77, SD=1.07), F(2, 114)=8.76, p<.001. The extroverted participants (M=5.64, SD=1.01) also reported a significantly stronger immersive tendency in the relationship than the intermediate (M=5.09, SD=0.86) and introverted participants (M=4.33, SD=1.02), F(2, 114)=23.26, p<.001, and the extroverted participants (M=5.34, SD=0.92) were preferred than the intermediate (M=4.90, SD=1.07) and introverted participants (M=4.63, SD=1.55), F(2, 114)=4.43, p<.05.
The participant's personality also affected his/her assessment of the anthropomorphism and social presence of the robot. The extroverted participants (M=5.88, SD=0.90) assigned a significantly higher degree of anthropomorphism to the robots than the intermediate (M=4.70, SD=1.27) and introverted participants (M=4.08, SD=1.09), F(2, 114)=28.35, p<.001 (Fig. 2). In addition, the introverted participants (M=4.74, SD=1.53) regarded a significantly lower degree of social presence in the robots than the extroverted (M=5.80, SD=0.78) and intermediate participants (M=5.26, SD=0.98), F(2, 114)=8.87, p<.001.

The mean and standard error on anthropomorphism based on the personality of participants.
The ANOVA further indicated notable effects of the robot's personality on two dependent variables. For instance, participants with an extroverted robot (M=5.25, SD=1.18) reported a higher degree of friendliness than those with an introverted robot (M=4.81, SD=1.04), F(1, 114)=6.49, p<.05. Participants with an extroverted robot (M=5.09, SD=1.39) also reported a higher degree of anthropomorphism than those with an introverted robot (M=4.68, SD=1.23), F(1, 114)=4.35, p<.05 (Fig. 3). However, the robot's personality had no significant effect on participants' evaluation of its immersive tendency (p=.62), preference (p=.74) and social presence (p=.37).
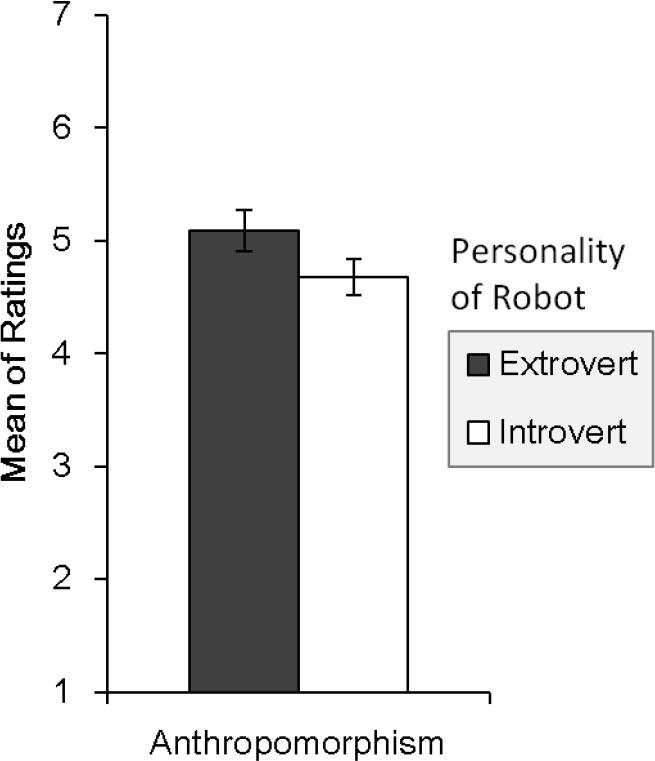
The mean and standard error on anthropomorphism based on the robot's personality.
Interaction between the robot's personality and the human's personality also significantly affected the participants' assessment of its friendliness (F(2, 114)=18.80, p<.001), immersive tendency (F(2, 114)=16.08, p<.001), preference (F(2, 114)=15.44, p<.001) and social presence (F2, 114)=3.77, p<.05) (Fig. 4, 5, 6 and 7). These results indicate that the personalities of both the human and the robot affected each human's perspective differently. In other words, similar to the case of extroverted participants, introverted participants felt higher degrees of friendliness, immersive tendency and preference when they interacted with a robot whose personality was similar to their own. On the contrary, introverted participants felt a lower degree of social presence with the introverted robot compared to the extroverted robot, which was dissimilar to the extroverted participants' case.
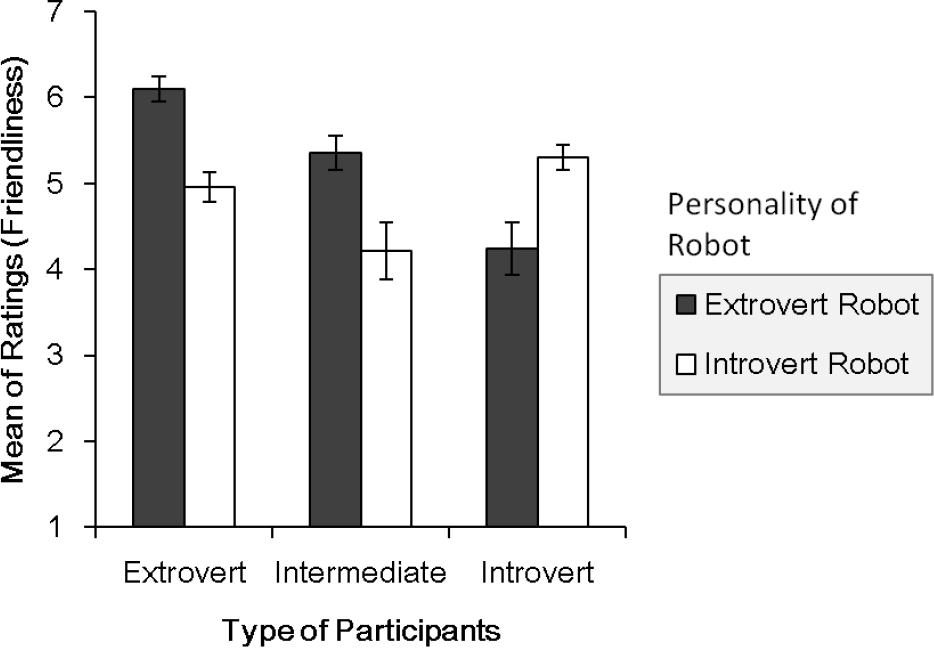
The mean and standard error of participants' friendliness.

The mean and standard error of participants' immersive tendency.

The mean and standard error of participants' preference.

The mean and standard error of participants' social presence.
5. Discussion and Conclusion
Our findings provide valuable insight for both designers and researchers of future works pertaining to human personalities in human-robot interactions. Furthermore, they may be applicable to future design guidelines for social robots. Although personality is only one of many facets of a person's character, the personality of both robots and humans plays a significant role in determining a human's psychological perspective in human-robot interactions, as is true of human-human interactions.
In particular, the results indicated that humans preferred to interact with others – even robots – who had similar personalities to themselves. Nevertheless, regarding the facet of social presence, the introverted participants indicated opposing results, showing a lower degree of presence with the introverted robot than with the extroverted one.
Consistent with the findings in previous studies of human-computer interactions and human-human interactions, this study suggests that personality has similar effects on the psychology of humans who interact with robots. In other words, participants preferred to interact with robots that had a similar personality to themselves. This relationship is referred to as the ‘law of attraction’ in human-human interactions. In this study, we confirmed this law in human-robot interactions [22, 36, 41–43].
6. Limitations and Future Studies
Nevertheless, this study was limited by various factors. First, all of the participants were undergraduate or graduate students. Commonly, students at university have been conditioned to develop good social relationships, so the personality of participating groups may have been biased to some degree. To overcome this limitation and obtain a more general result, future research must utilize a more diverse sample set of participants. Similarly, all of the participants were native Koreans; the results may have been different given participants from other cultural regions. In fact, further studies could pursue the cultural effects of facial communications between Eastern and Western societies.
Footnotes
7. Acknowledgments
A preliminary and motivated version of this paper was published in the 7th ACM/IEEE International Conference on Human-Robot Interaction (HRI ‘12), Mar. 5-8, Boston, USA. This version includes a concrete review and employs new experiments to enhance our results. This research was partly supported by Samsung Students Research Fund, by Ministerio de Ciencia e Innovación (DPI2011-27846), by Generalitat Valenciana (PROMETEO/2009/052) and by Fundacio Caixa Castello-Bancaixa (P1-1B2011-54).