
Abstract
This paper represents a self-structured organizing single-input control system based on differentiable cerebellar model articulation controller (CMAC) for an n-link robot manipulator to achieve the high-precision position tracking. In the proposed scheme, the single-input CMAC controller is solely used to control the plant, so the input space dimension of CMAC can be simplified and no conventional controller is needed. The structure of single-input CMAC will also be self-organized; that is, the layers of single-input CMAC will grow or prune systematically and their receptive functions can be automatically adjusted. The online tuning laws of single-input CMAC parameters are derived in gradient-descent learning method and the discrete-type Lyapunov function is applied to determine the learning rates of proposed control system so that the stability of the system can be guaranteed. The simulation results of robot manipulator are provided to verify the effectiveness of the proposed control methodology.
Keywords
Introduction
In general, robotic manipulators have to face various uncertainties in their dynamics, such as friction, and external disturbance. It is difficult to establish exactly mathematical model for the design of a model-based control system. In order to deal with this problem, the braches of current control theories are broad include classical control: neural networks (NNs) control [1]–[3], adaptive fuzzy logic control (FLCs) [4]–[6] or adaptive fuzzy-neural networks (FNNs) [7]–[9]. They are classified as adaptive intelligent control based on conventional adaptive control techniques where fuzzy systems or neural networks are utilized to approximate a nonlinear function of the systems dynamics. However, many adaptive approaches are rejected as being overly computationally intensive because of the real-time parameter identification and control design required.
Fuzzy logic control (FLCs) has found extensive applications for plants that are complex and ill-defined which is suitable for simple second order plants. However, in case of complex higher order plants, all process states are required as fuzzy input variables to implement state feedback FLCs. All the state variables must be used to represent contents of the rule antecedent. So, it requires a huge number of control rules and much effort to create. To address these issues, single-input Fuzzy Logic controllers (S-FLC) was proposed for the identification and control of complex dynamical systems [10]–[12]. As a result, the number of fuzzy rules is greatly reduced compared to the case of the conventional FLCs, but its control performance is almost the same as conventional FLCs.
Neural networks (NNs) are a model-free approach, which can approximate a nonlinear function to arbitrary accuracy [1]–[3]. However, the learning speed of the NNs is slow. To deals these issues, cerebellar model articulation controller (CMAC) was proposed by Albus in 1975 [13] for the identification and control of complex dynamical systems, due to its advantage of fast learning property, good generalization capability and ease of implementation by hardware [13]–[15]. The conventional CMACs, regarded as non-fully connected perceptron-like associative memory network with overlapping receptive fields which used constant binary or triangular functions. The disadvantage is that their derivative information is not preserved. For acquiring the derivative information of input and output variables, Chiang and Tin [16] developed a CMAC network with a differentiable Gaussian receptive-field basis function and provided the convergence analysis for this network. The advantages of using CMAC over neural network in many applications were well documented [17]–[21]. However, in the above CMAC literatures, the structure of CMAC cannot be obtained automatically. The amount of memory space is difficult to select, which will influence the learning and control schemes. Some self-organizing CMAC neural networks were proposed for structure adaptation [22]–[25]. In [22], [23] used a data clustering technique to reduce the memory size and developed a structural adaptation technique in order to accommodate new data sets. However, only the structure growing mechanism is introduced; the pruning mechanism was not discussed in this. In [24], a self-organizing hierarchical CMAC was introduced. The authors proposed a multilayer hierarchical CMAC model and used Shannon's entropy measure and golden-section search method to determine the input space quantization. However, their approach is too complicated and lacks online real-time adaptation ability. Online adjusting suitable memory space of CMAC structure is our motivation. To address these issues, C. M. Tin, T. Y. Chen proposed self-organizing control system [25]. This control system does not require prior knowledge amount of memory space, the layers of CMAC will grow or prune systematically. However, the dimension of the input space of CMAC control system is reduced through a combination of sliding control model. Recently, to deal with the problem simplified input, B. J Choi, S. W. Kwak and B. K. Kim proposed the S-FLC [10]–[12] and its advantages which are mentioned above. Based on the S-FLC, several literatures developed single-input CMAC (S-CMAC) control system [26]–[27], which adopts two learning stages, namely, an offline learning stage and online learning stage. The disadvantage is that their derivative information is also not preserved. So, M. F. Yeh and C. H. Tsai proposed differentiable standalone CMAC control system [28] to provided better system status in the learning control. In addition, the quantization of input space could be reduced while using the differentiable standalone CMAC. However, the disadvantages are that the structure of S-CMAC cannot to obtain automatically.
In this paper, we suggest a novel self-structured organizing single-input CMAC (SOSICM) control system for an n-link robot manipulator to achieve the high-precision position tracking. This control system combines advantages of S-CMAC and it does not require prior knowledge of a certain amount of memory space, and the self-organizing approach demonstrates the properties of generating and pruning the input layers automatically. The developed self-organizing rule of S-CMAC is clearly and easily used for real-time systems. Moreover, the developed system is solely used to control the plant and no conventional or compensated controller. The online tuning laws of CMAC parameters are derived in gradient-descent method.
This paper is organized as follows: System description is described in section 2. Section 3 presents SOSICM control system. Numerical simulation results of a two-link robot manipulator under the possible occurrence of uncertainties are provided to demonstrate the tracking control performance of the proposed SOSICM system in section 4. Finally, conclusions are drawn in section 5.
System Description
In general, the dynamic of an n-link robot manipulator may be expressed in the Lagrange following form:

Where

Architecture of two-link robot manipulator.
disturbance t1, friction term
The control problem is to force q i (t) ∊ R n , i = 1,2, … m to track a given bounded reference input signal q di (t) ∊ R n . Let e i (t) be the tracking error vector as follows:

and the system tracking error vector is defined as
Where K
ni
∊ Rnxn is the scaling factor matrix for the system tracking vector
Based on [10], [11], then the tracking error ε i ∊ R n is transformed into a single variable, termed the signed distance d si ∊ R m , which is the distance from an actual state ε i ∊ R n to the switching line as shown in Fig. 2 for a 2-D input. The switching line is defined as follows:

Where Λn−1 ∊ Rn−1 is a constant. Then, the signed distance between the switching line and operating point ε i ∊ R n can be expressed by the following equation:

According to the standalone CMAC control system is shown in Fig. 3. This control scheme provided better control characteristics due to using the differentiable CMAC in the system. The advantage is that derivative information of input and output variables is preserved in learning process. In addition, the generalization error caused by quantization of input space could be reduced while using the differentiable CMAC.

Derivation of a signed distance

Block diagram of standalone CMAC control system.
Based on the standalone CMAC control system, we propose the SOSICM control system as shown in Fig. 4, which combines advantages of standalone CMAC and it does not require prior knowledge of a certain amount of memory space. The self-organizing approach demonstrates the properties of generating and pruning the input layers automatically. The developed self-organizing rule of CMAC is clearly and easily used for real-time systems.

Block diagram of proposed SOSICM control system.
Brief of the S-CMAC
An S-CMAC is proposed and shown in Fig. 5, in which is composed of an input space, association memory space, weight space and output space. The signal propagation and the basic function in each space are expressed as follows:
Input space D s ; assume that each input state variable d si can be quantized into N si discrete states and that the information of a quantized state is regarded as region for each layer n ki th. Therefore, there exist N si + 1 individual points on the d si - axis. Fig. 6 shows the case of N si = 10. Each activated state in each layer becomes a firing element, thus, the weight of each layer can be obtained. The Gaussian basic function for each layer is given as follows:
Where φ ki represents the kth layer of the input d si with the mean m ki and the variance σ ki .
Output space O: The output of S-CMAC is the algebraic sum of the firing element with the weight memory, and is expressed as

Where w ki denotes the weight of the kth layer, a ki = a ki (d si ), k = 1, 2, … n ki is the index indicating whether the ith memory element is addressed by the state involving d si . Since each state addressed exactly n ki memory elements, only those addressed a ki 's are one, and the others are zero.
The block diagram in Fig. 3, in which only the S-CMAC play a major role in the control process, thus to have a trade-off between the desired performance and the computation loading we must to choose a reasonable number of layers. However, if the number of layers is chosen too small, the learning performance may be insufficient to achieve a desired performance. Otherwise, if the number of layers is chose too large, the calculation process is too heavy, so it is not suitable for real-time applications. To deal this problem, a self-structured organizing S-CMAC is proposed which includes structure and parameter learning as shown in Fig. 4.

Architecture of a single-input CMAC

Block division of CMAC with Gaussian basic function
In this section, structural learning is necessary to determine whether to add a new layer in association memory A depends on the firing strength φ ki ∊ R n ki of each layer for each incoming data d si . If the firing strength φ ki ∊ R n ki of each layer for new input data d si falls outside the bounds of the threshold, then, SOSICM will generate a new layer. The self-structured organizing S-CMAC can be summarized as follows:
Calculate the firing strength φ ki ∊ R n ki of each layer for each input data d si in (6).
Using Max-Min method is proposed for layer growing. Find

If

Here K
gi
is a threshold value of adaptation
This means that for a new input data, the exciting value of existing basic function is too small. In this case, number of layers increased as follows:

Where n ki is the number of layers at time t. in the meanwhile, a new layer will be generated and then the corresponding parameters in the new layer such as the initial mean and variance of Gaussian basic function in association memory space and the weight memory space will be defined as



Another self-structured organizing learning process is considered to determine whether to delete existing layer, which is inappropriate. A Max-Min method is proposed for layer pruning.
Considering the output of SOSICM in (7), the ratio of the kth component of output is defined as

Where
If

Here K
ci
is a predefined deleting threshold, in our case K
ci
= 0.03. Then, the
The central part of the learning algorithm for a SOSICM is how to choose the weight memory w
ki
, mean m
ki
, variance σ
ki
of the Gaussian basic function, and k
ni
are the scaling factors of the error e
i
and the change of error

According to the energy function (17) and the system structure in Fig. 4, and the error term to be propagated is given by

Where ∂q i /∂τ i represent the sensitivity of the plant with respect to its input. With the energy function E i , the parameters updating law based on the normalized gradient descent method can be derived as follows
The updating law for the kth weight memory can be derived according to

Where β wi is positive learning rate for the output weight memory W ki , the connective weight can be updated according to the following equation:

The mean and variance of the kth Gaussian basic function can be also updated according to


Where β mi , βσi are positive learning rates for the mean and variance, respectively. The mean and variance can be updated as follows:


Finally, the updating law for scaling factors can be derived as follows:

Where β ni is the learning rate, and it can be updated by the following:

The plant sensitivity ∂q i /∂τ i in (18) can be calculated if the plant model is exactly known. However, the plant model is unknown, so ∂q i /∂τ i can not obtained in advance. To deal with this problem, in [28], a simple approximation of the error term of the system can be use as follows:

The update laws of equations (19), (21), (22), and (25) require a proper choice of the learning rates β wi , β mi , βσi, and β ni in order to the convergence of the output error is guaranteed; however, this is not easy which depends on each person's experience. To train the S-CMAC effectively, the variable learning rates which guarantee convergence of the output error are derived in the following.
Defined a discrete-type Tyapunov function can be given by
Thus, the change of the Tyapunov due to the training process is obtained as

Where e i (k +1) is represented by [28]

Where Δe i represents the in the learning process, ΔP i denotes a change of an adjustable parameters. Using equation (18), we have ∂e i /∂P i = −δ pi ∂τ i /e i (k)∂P i and ΔP i = −β pi ∂E i /∂P i = β pi δ pi ∂τ i /∂P i , where β pi is the learning rate for the parameter P i .
Thus:

If the learning rate β pi is selected as:

then ΔV i (k) 0, therefore V i (k + 1) V i (k), the Tyapunov stability (system stability) and the convergence of the tracking error could be guaranteed. In addition, the optimal learning rate can be found for achieving faster convergence by taking the differential equation (31) with respect to β pi and equals to zero. Finally, the optimal learning rate can be determined as follows:

Where ∂τ i /∂P i for P i = w ki , m ki , σ ki and K ni , it can be obtained as:

A two-link robot manipulator as shown in Fig.l is utilized in this paper to verify the effectiveness of the proposed control scheme. The detailed system parameters of this robot manipulator are given as: link mass m1, m2 (kg), lengths l1, l2 (m) and angular positions q1, q2 (rad).
The parameters for the equation of motion (1) are adopted in [4].

Where q ∊ R2 and the shorthand notations c1 = cos(q1), c2 = cos(q2), s1 = sin(q1) and s2 = sin(q2) are used.
For the convenience of the simulation, the nominal parameters of the robotic system are given as m1 = 4.6 (kg) m2 = 2.3(kg), l1 = 0.5 (m), l2 = 0.2 (m) and g = 9.8 (m/s2) and the initial conditions q1(0) = 0.5, q2(0) = 0.5,
The most important parameters that affect the control performance of the robotic system are the external disturbance t
l
, the friction term

In addition, friction forces are also considered in this simulation and given as

In order to exhibit the superior control performance of the proposed SOSICM control system, the control system standalone CMAC is introduced in Fig. 3 is examined in the mean time [28]. They are applied to control two-link robot manipulator and the same setting of SOSICM and standalone CMAC control system are chose in the following: The inputs space of S-CMAC are ds1 and ds2, the mean and variance of Gaussian basic functions are selected to cover the input space {[−1 ‘][−1 1]}; all initial weight are set to zero, i.e., wk1 = wk2 = 0, k = 1,2, … n ki . The parameter Λ in the switching line is one. For recording respective control performance, the mean-square-error of the position-tracking response is defined as:

Where T is the total sampling instant, and q i and q di are the elements in the vector q i and q di . In this paper, the numerical simulation results carried out by using Matlab software.
Example 1: Consider the standalone CMAC control system is shown in Fig. 3.
For the standalone CMAC control system, the parameters are chose in the following: β wi = 0.05, β mi = 0.05, βσi = 0.05, β ni = 0.02, the initial value of Gaussian basic functions and scaling factors are chosen as m1i = −1.0, m2i = −0.8, −m3i = −0.6, m4i = −0.4, m5i = −0.2, m6i = 0.0, m7i = 0.2, m8i = 0.4, m9i = 0.6 m10i = 0.8 m11i = 1.0, σ ki = 0.15, k1i = 0.5 and k2i = 0.2 for k = 1, 2, … 11, i = 1,2. The simulation results of standalone CMAC system, the responses of joint position, MSE and tracking error are depicted Fig. 7(a), (b); (c), (d) and (c), (d), respectively.
Example 2: Consider the proposed SOSICM control system is shown in Fig. 4.
For the proposed SOSICM control system, the parameters are chose in the following:
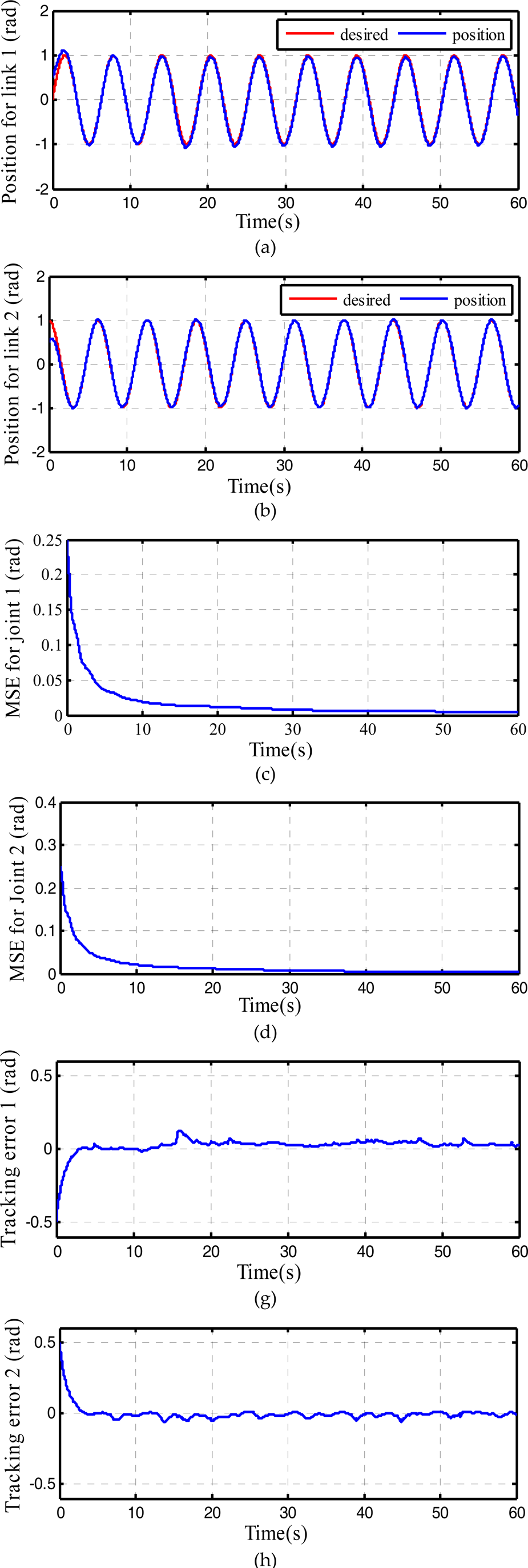
β* pi = 1/[δ pi /e i (k)]2 ||∂τ i /∂P i ||2 for P i = w ki , m ki , σ ki and k ni , and the initial values of system parameters are given as n ki = 2, the inputs of S-CMAC ds1 and ds2, the mean and variance of Gaussian basic functions are selected to cover the input space {[−1 1][−1 1]}. The threshold value of K gi is set as 0.1; K ci is set as 0.03 for i = 1, 2. The simulation results of proposed SOSICM system, the responses of joint position, MSE, layer numbers and tracking error are depicted Fig. 7(a), (b); (c), (d); (e), (f) and (g), (h), respectively.
Simulated position responses, MSEs, and tracking errors of the Standalone CMAC control system at joints 1 and 2.
According to the simulation results as shown in Fig. 7 and Fig. 8, the joint-position tracking responses of the SOSICM system can be controlled to more closely follow desired reference trajectories than the standalone CMAC as shown in Fig. 7, 8(a), (b). In the Fig. 7, 8(c), (d), the MSE of proposed control system for each joint reduced faster than and finally converges to 0.0003 and 0,0006, meanwhile the MSE of standalone CMAC is 0.004 and 0.003 and number layers of S-CMACs converges to four and six layers as shown in Fig. 8(e), (f).

Simulated position responses, MSEs, number layers and tracking errors of the SOSICM control system at joints 1 and 2.
In this paper, a SOSICM control system is proposed to control the joint position of a two-link robot manipulator. In the SOSICM system, system dynamics is completely unknown and auxiliary compensated control is not required in the control process. The online tuning laws of S-CMAC parameters are derived in gradient-descent learning method and the discrete-type Lyapunov function is applied to determine the variable optimal learning rates so that the stability of the system can be guaranteed. This paper has successfully developed the SOSICM control system for an n-link robot manipulator not only requires low memory with online structure and parameters tuning algorithm, but also the input space can be reduced through the signed distance. The simulation results of the proposed SOSICM system can achieve favorable tracking performance for two-link robot manipulator.
Footnotes
6.
The authors would like to thank the associate editor and the reviewers for their valuable comments.