
Abstract
A 2-degree-of-freedom internal model control strategy based on U-model is presented for an unknown multivariable nonlinear systems. The proposed algorithm focuses the case where the noise is added at the input of the system and makes use of a local disturbance rejector. The unknown multivariable nonlinear system is identified by the control oriented U-model and the inverse controller is established using Newton-Raphson method. The proposed algorithm is tested in real-time on a 2-link robot manipulator.
Introduction
Ever since the internal model control (IMC) strategy was first introduced ([1]), several modifications have been introduced to improve the performance or achieve specific desired objectives. For example the classical IMC requires the plant to be stable. The problem of windup caused by the actuator saturation is not considered in the classical IMC. Although IMC has inherent disturbance rejection capabilities, in practical applications, even small plant model mismatch can lead to adequate tracking errors. Moreover, the classical IMC structure cannot reject disturbances that enter the system from the input of the plant. Therefore, these short comings are handled later by several researchers and different modified IMC schemes are introduced. Modified IMC is also referred to as the 2-degree-of-freedom (2DoF) IMC. A 2DoF controller for motor drives with first order model is proposed in ([14]). The parameters of the proposed controller are designed using a systematic approach to match the prescribed motor drive specification. 2DoF (IMC) is implemented ([16]) for the temperature control of a single tubular heat exchanger system. The controller had two degree of freedom, the one tuning filtering parameter of IMC controller affected the tracking of reference and the other tuning parameter of IMC reduce disturbance. A high performance input-output linearizing control law is claimed in ([8]). The authors presented a modified IMC scheme that can handle constraints to the plant input as well. In the same perspective, windup scenarios were also considered and applied to nonlinear control. The nonlinear MIMO neural network (NN) control based on a simple and straightforward modification of the IMC is presented in ([9]). The nonlinear modified internal model control (MIMC) structure is completely defined by the inverse process model and guarantees the offset-free control. The inverse process model, defining the main controller in Modified IMC, is obtained by the experimental NN inverse modellingg technique. A modified IMC structure with simplified design is presented by ([11]). The authors presented the idea to avoid the modelling of the plant and in effect to avoid the high modelling errors. An anti-windup control strategy using the modified IMC is presented in ([12]). This method dealt with both stable and unstable systems. A modified internal model control technique is presented for unstable systems in ([15]). The author presented a very simple feedback block that stabilizes the plant. The overall stabilized loop was then controlled using the regular IMC for stable systems. Properties of the system like stability and robust stability are also discussed for the proposed scheme. A disturbance observer-based control scheme for modified IMC is presented in ([13]). The authors have shown that the algorithm is very effective in controlling integral processes with dead time. A parametrization of all stabilizing 2DoF controllers for (possibly unstable) processes with dead-time is presented in modified IMC structure by ([10]). A modified IMC structure is proposed in ([18]) for unstable processes with time delays. The structure extends the standard IMC structure for stable processes to unstable processes and controllers do not have to be converted to conventional ones for implementation. An advantage of the structure is that set-point tracking and disturbance rejection can be designed separately. In ([7]), the authors proposed a design procedure of neural internal model control systems for stable processes with delay. They showed that the design of such non adaptive indirect control systems necessitates only the training of the inverse of the model deprived from its delay, and that the presence of the delay thus does not increase the order of the inverse. The controller is then obtained by cascading this inverse with a rallying model which imposes the regulation dynamic behavior and ensures the robustness of the stability. A (2DoF) IMC structure is presented in ([17]). The design procedure uses the gain and phase margin specifications. The author showed improved performance and robustness to both modelling errors and external disturbances.
In this paper, a 2DoF U-model based adaptive IMC is proposed for multivariable nonlinear systems where disturbances also enters the system at the input. U-model is a control-oriented model introduced by ([3]) and has effectively been used in learning feedforward control for multivariable nonlinear systems ([19]). The proposed scheme not only achieves perfect tracking but also shows improved disturbance rejection capabilities. The inverse controller for U-model is obtained by NewtonURaphson root solving technique. The effects of noise added at the input are reduced using a local noise rejector. This approach gives same design procedure for both invertible and non-invertible nonlinear systems. The proposed scheme is tested on a 2-link robot manipulator in real-time.
This paper is organized as follows.
Modelling Framework and Problem Formulation
The nonlinear auto regressive moving average with exogenous input (NARMAX) provides a unified representation for a wide class of discrete-time non-linear systems. In a NARMAX description the system is modelled in terms of a non-linear functional expansion of lagged inputs, outputs and prediction errors. Consider the NARMAX representation of a MIMO nonlinear plant as ([4, 5]),

where Y(t) and U(t) are the vectors of output and input signals of the plant at a discrete time instant t, E(t) represents the prediction errors compensating for measurement noise, model mismatch, uncertain dynamics and plant variation and also the disturbances entering the system at the input.
The problem can be stated as: given a MIMO nonlinear system with NARMAX representation as in Eq. 2 and disturbances entering at the input of the system, the objective is to synthesize the control input U(t − 1) such that Y(t) tracks an arbitrary piece-wise continuous trajectory R(t) with improved noise rejection. Further it is considered that the plant parameters are unknown and slowly time varying.
The U-model Structure
The NARMAX representation can be transformed into a U-model structure([19]). Considering the NARMAX representation, the U-model is established by expanding the nonlinear function given by Eq. 2 as a polynomial with respect to the control signal U(t − 1) at current time instant t as follows([19]):

or

The model output Y
m
(t) is a p × 1 vector. It is a function of the current control signal U(t − 1), where U(t − 1) is the m × 1 control input vector, m is the degree of the multivariable polynomial.

Unknown multivariable system with additive noise at the input
The A j is a function of past inputs and past outputs except for U(t − 1). The term A 0 is a p × 1 vector and A j are p × m matrices, where M is the degree of model input U(t − 1), α j (t) is a function of past inputs and outputs u(t − 2), …, u(t − m), y(t − 1), …, y(t − n) and disturbance errors e(t), …, e(t − l).
The term A0 is modelled using a MIMO radial basis function neural networks (RBFNN) as:

where, W and Φ(t) are the weights of the RBFNN and basis function vector, respectively (for details, see [6]). The reason for incorporating the RBFNN is to assist the nonlinear modelling([19]).
The weights of the RBFNN and the rest of the parameters A j are estimated online, and updated using the normalized least mean square (nLMS) principle as,


The plant-model mismatch error Err(t) is the measure of difference in the behavior of P and P m . μ(t) and α(t) are the nLMS learning rate defined as([19]),

where, γ,
The inverse controller is established on U-model methodology based on Newton-Raphson. The control signal is the Newton-Raphson solution of the U-model polynomial equation given by 3. The control signal for the k th iteration is found as [19],

F(U(t − 1)) is the U-model output Y m (t) and F'(U k (t − 1)) is the Jacobian matrix which includes the process interactions and coupling between system variables.
In this research a 2DoF adaptive IMC is proposed using MIMO U-model for unknown multivariable nonlinear systems. In order to get more insight a brief discussion on a general 2DoF IMC is presented.
2DoF IMC for Improved Disturbance Rejection
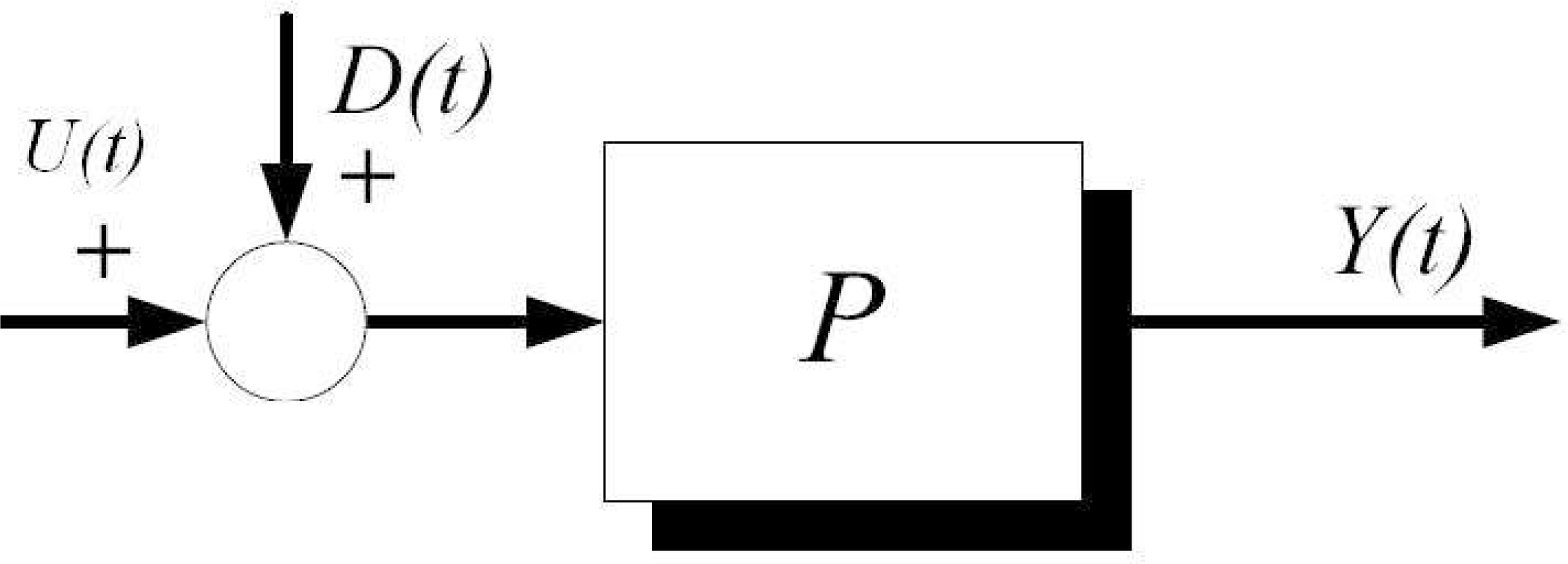
A 2DoF IMC scheme for improved disturbance rejection is shown in Fig 2. The objective is to achieve perfect tracking in the presence of noise. The original IMC is capable of rejecting the noise at the output. However, the second degree of freedom added in this scheme rejects the noise that enters at the input of the system. It is known that the classical IMC structure cannot reject such disturbances [17].
In this scheme P is the unknown multivariable nonlinear plant and P m is the estimated internal model of P. The inverse controller P I is the inverse of P m . R(t) is the arbitrary reference trajectory. U(t − 1) is the control input generated by the inverse controller P I . The input signal is corrupted by the additive disturbances D(t). Y(t) and Y m (t) are plant and model outputs. The feedback error signal E(t) is the difference between R(t) and the plant-model mismatch Err(t). The second degree of freedom L is introduced, termed as the local noise rejector. The local noise rejector L acts on the mismatch signal between the plant and model outputs.
Transfer Function from Input-to-Output
In order to find the transfer function from input-to-output T R , the disturbances D(t) are suppressed to zero in Fig. 2.

2DoF IMC with improved disturbance rejection
The model output
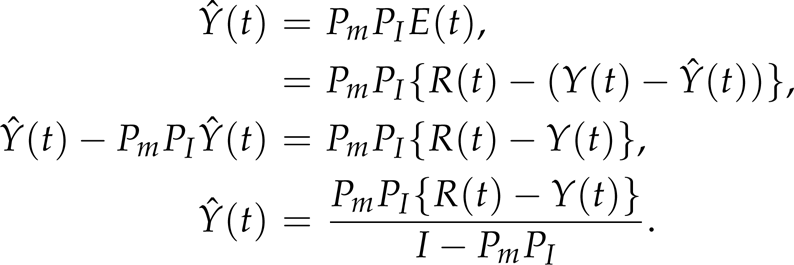
Similarly, the plant output can be written as,

Rearranging the terms we get,

Now utilizing the expression for

Simplifying the equation we get,


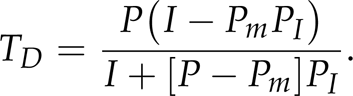
Now considering the Fig. 2 where the disturbance is entering the system at the input, the disturbance transfer function T D can be found as follows (suppress the reference R(t) to zero):

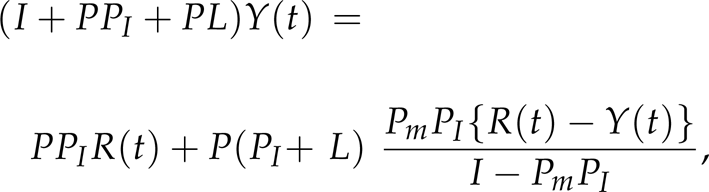
The plant output can be expressed as:

Collecting terms,

Substituting the value of



U-model based 2DoF IMC with improved disturbance rejection
Simplifying the equation we get,


Considering Eq. 23, with L = 0, the 2DoF IMC structure reduces to original IMC, as;
For perfect modelling, P = P m , Eq. 24 simplifies to,

Therefore, Eq. 25 implies that, disturbance entering the system at the input of the plant will result in a steady state error.
However, for the 2DoF IMC case, with perfect modelling, Eq. 23 reduces to,

Comparing Eq. 24 and Eq. 26, it can be concluded that 2DoF IMC reduces the effect of external disturbances entering at the input of the system by a factor of [I + PL]−1. Hence, improved disturbance rejection is achieved compared to original IMC.
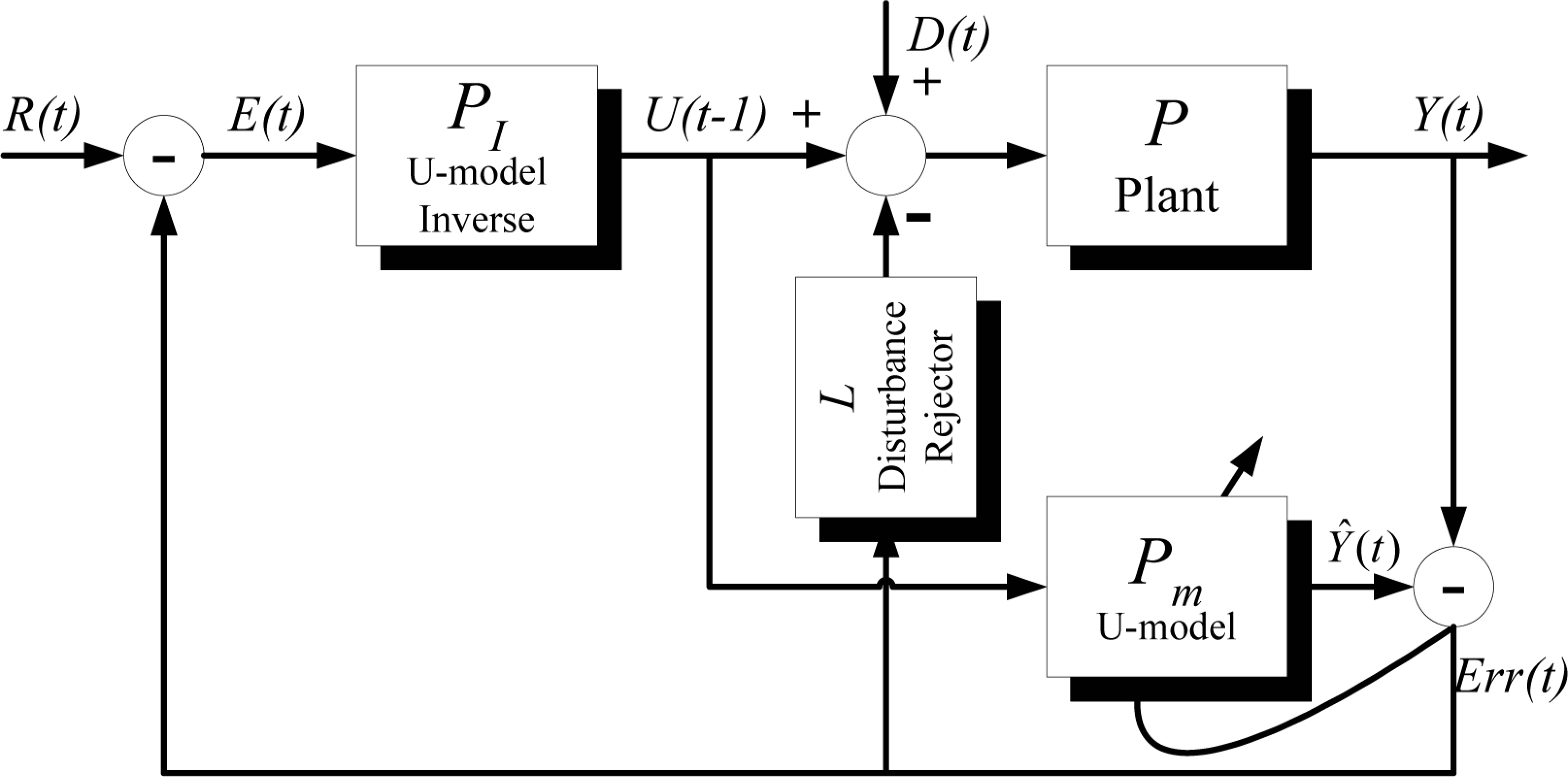
The proposed U-model based 2DoF IMC structure is shown in Fig. 3.
The unknown plant P is identified online as P M using the MIMO U-model given by Eq. 3 and the Newton-Raphson based inverse controller P I generates the control signal U(t − 1) given by Eq. 10.
In the proposed U-model based 2DoF IMC scheme, the local disturbance rejector is developed using a low pass filter. The use of a low pass filter is based on the fact that the high frequency component of the mismatch error is due to the unwanted disturbances. These undesired disturbances can be minimized by filtering the plant-model mismatch signal and induce the filtered signal to the input of the plant.
The weight and parameter update is performed using the nLMS principle as in Eq. 6 and Eq. 7.
Algorithm Summary
The proposed algorithm can be implemented as follows:
Measure plant output Y(t) and compute model output Y m (t) using Eq. 3.
Calculate mismatch Err(t),
Synthesize control input U(t − 1) using the updated values of
Modify the control input to add the effect of the local noise rejector.
Go back to step 1.

The Real-Time setup for the 2 link Robot
In order to verify the performance using the U-model based 2DoF IMC, the algorithms are implemented in real-time on the 2-link robot arm.
The Real-Time Setup
2-Degree of Freedom Robot Manipulator
To test and verify the behavior and robustness of the proposed algorithm, we have developed a 2-degree-of-freedom robot manipulator shown in Fig. 4([19]).
Hardware Assembly
The first link (named primary) has a length L1 30cm and the second link (named secondary) has a length L2 19cm. The primary link is made of Aluminium and the secondary link is made of Plastic material. The primary link is actuated by a geared motor HN-GH 27, with a gear ratio of 50:1 and an allowable maximum torque of 2.3 KG-cm. The secondary link is actuated by another geared motor HN-GH 12, with a gear ratio of 188:1 and an allowable maximum torque of 1.4 KG-cm. The geometry of the 2-link robot is shown in Fig. 5 ([19]).
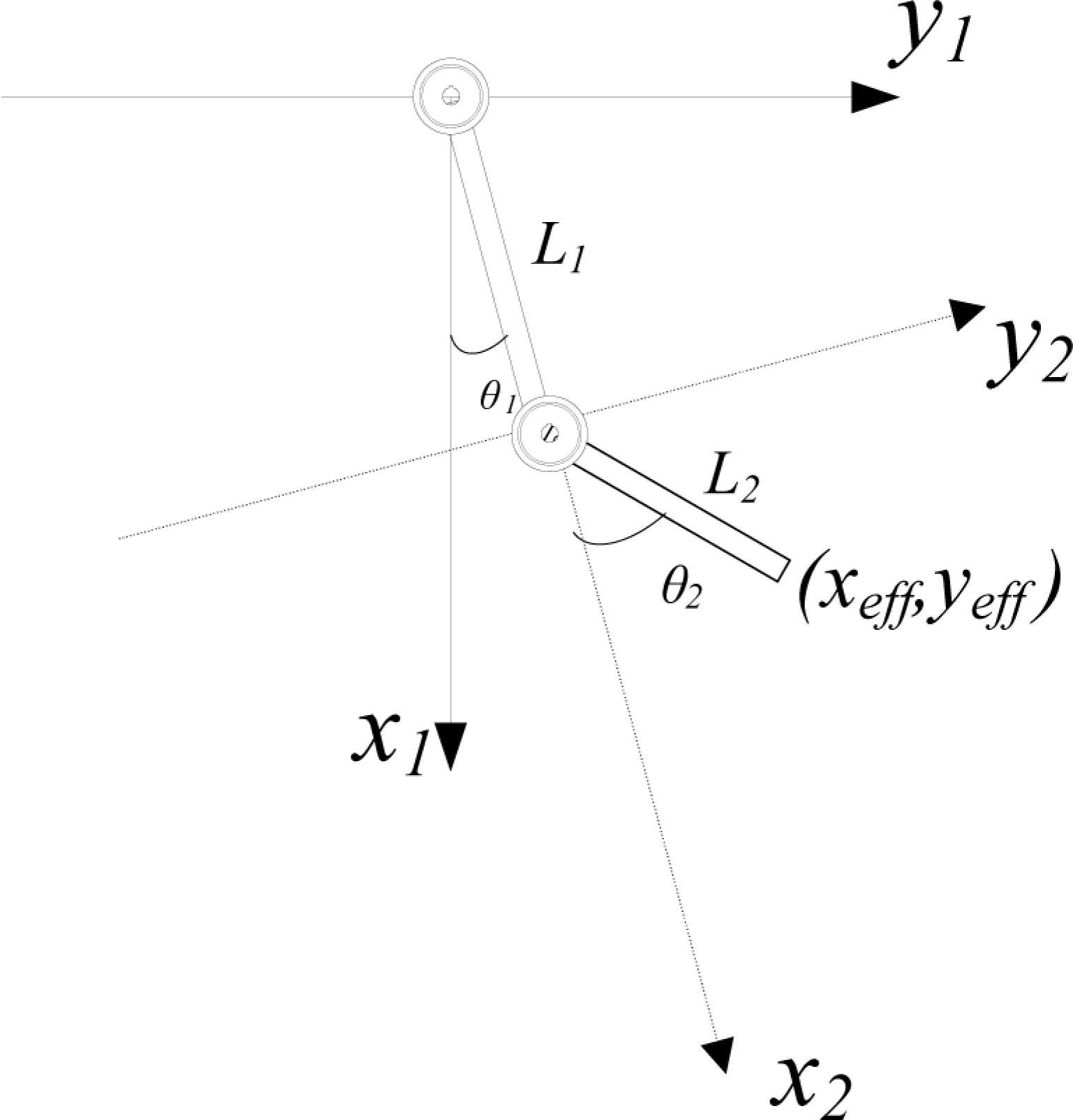
The 2 link Robot Geometry
To add the effect of load variation, the link is connected by elastic strings on both sides, such that the tension in the string is variable according to the angular position of the link. Tension in the string increases with increasing rotation angle. The feedback signals i.e. the angles of the links are measured by two 0-50KΩ potentiometers. Due to the physical limitations, the primary link is constrained to have a maximum rotation of

The workspace for the 2-link Robot
The dynamic model of the 2-link robot can be written found in [2].
The real-time code is built in SIMULINK on Intel Pentium III 933MHz Computer with 256MB RAM with a sample time of 0.01 second. The interfacing is performed using the Advantech PCI-1711 I/O card. Analogue-to-Digital conversion to provide the control signal, and the Digital-to-Analogue conversion to get the feedback signal is performed using the FeedBack 33-301 interface module. The control signals are powered by FeedBack Power Supply PS150E and amplified using the Servo Amplifiers FeedBack SA150D. The reference signal is set to be a random piece-wise continuous signal with a step time of 3 seconds([19]).
Local Noise Rejector
The suggested algorithm rejects the noise entering at the input of the system with an additional noise rejector. However, the disturbance transfer function given by Eq. 23, allows the designer to freely select the noise rejector. Hence, by intuition and the fact that a low pass filter will be suitable to reject high frequency noise, an 8 th order low pass Butterworth filter with a 30 rad/sec passband cutoff is selected as a local noise rejector. The algorithm is tested under varying load conditions with the elastic strings connected to the primary link.
Tracking at No Load Conditions
For initial comparison a PID controller is tuned manually by intuition at no load to achieve best possible tracking. The tracking behavior is shown in Fig. 7. The response shows an acceptable steady-state tracking even though there are high overshoots at the transition and occasional mismatch in the tracking.

Tracking using a PID controller at no load
The proposed U-model based 2D0F scheme is applied to the 2 link robot using a 3rd order U-model and a 2 input 2 output RBFNN with 2 neurons for the A0. The width of the Gaussian basis functions is kept as 1 to cover a large input range. The randomly initialized weights of the RBFNN and the matrix parameters A j are updated using the nLMS principle with a learning rate of 0.05. In the real-time experiments the learning rate is set as a small enough constant after few initial trial runs. The tracking is shown in Fig. 8. Fine tracking performance can be observed with no overshoot and mistracking as compared to the standard PID controller.
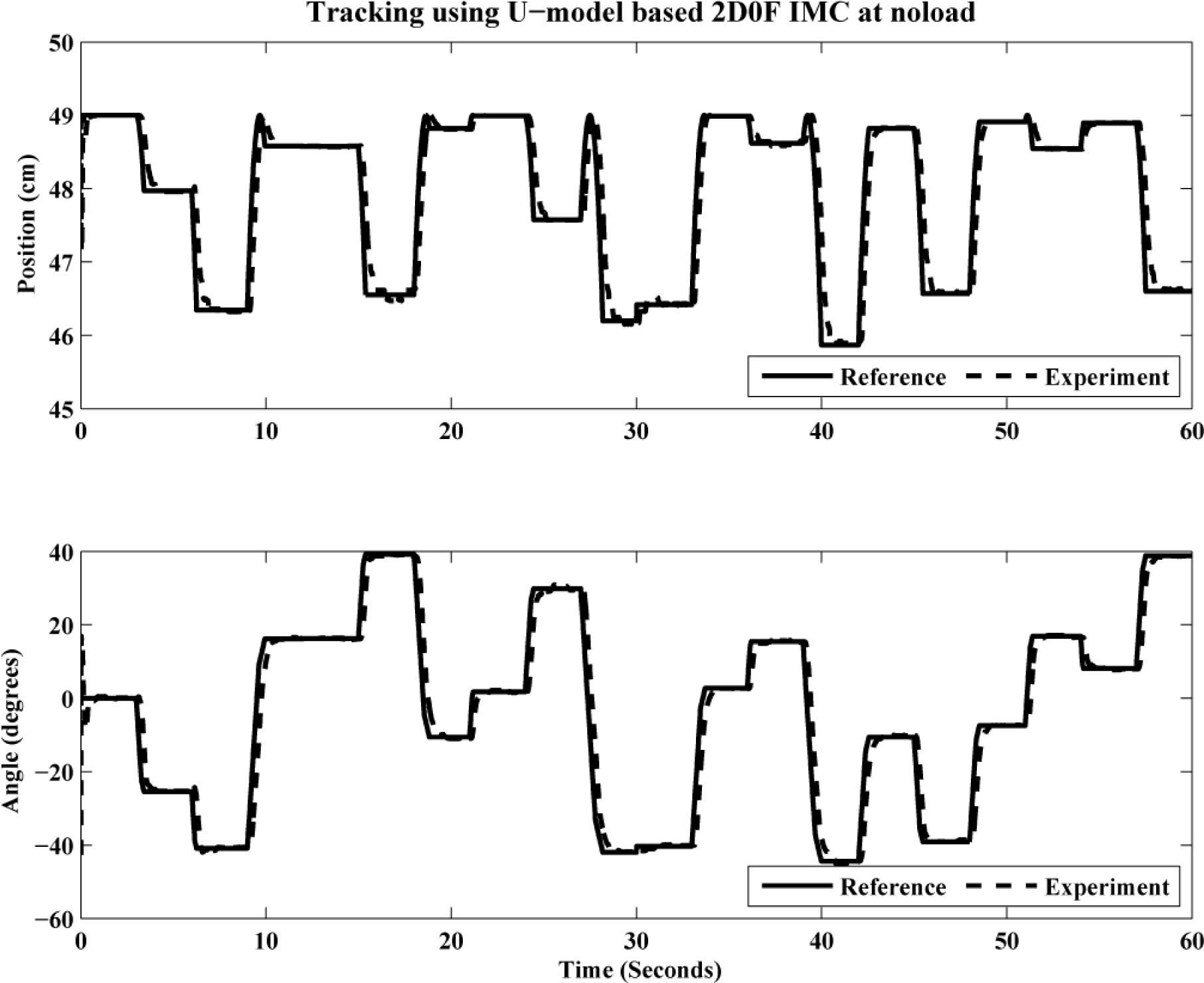
Tracking using U-model based 2DoF IMC at no load
Using the same setup, with a varying load, the performance of the PID controller tuned at no load is shown in Fig. 9 and it can be clearly seen that the PID controller tuned at no load was not able to track the reference trajectory with load variations.

Tracking with variable load using a PID controller tuned for no load
However, no degradation in the performance is observed when the proposed U-model based scheme is applied under varying load conditions. The U-model based adaptive scheme compensated for the varying load conditions and tracking behavior similar to no load conditions is observed as depicted in Fig. 10. This shows the tracking robustness of the adaptive scheme that is able to perform even with load variation which is a common practice in robotics.

Tracking using U-model based 2DoF IMC at varying load
The performance of the proposed U-model based scheme is compared with a number of schemes; such as nonlinear PID controller, adaptive PD controller, adaptive inverse control scheme. Fig. 11 shows a comparison in the mean squared errors sense. The comparison shows that the proposed scheme has performed better under varying load conditions. The proposed U-model based 2D0F IMC scheme is also compared with the U-model based IMC and learning feedforward control schemes. An initial faster convergence was observed using the U-model based 2DoF IMC scheme. The steady state error was also found to be the lowest among all the schemes however, the proposed scheme converged to smaller MSE, despite a little slower initial convergence.

Comparison of MSE
In this paper a new 2DoF IMC scheme for unknown multivariable nonlinear systems is presented. The unknown plant is identified online using MIMO U-model and the inverse controller is established using Newton-Raphson method based on U-model methodology. An additional degree of freedom is added using a local noise rejector that reduces the effect of disturbances entering at the input of the system. The proposed algorithm is tested on a 2-link robot manipulator in real-time. The real-time experimental results show that the proposed scheme is very effective in noisy environment under varying load conditions.