
Abstract
A multidisciplinary approach to a novel artificial intelligence system for an affective robot is presented in this paper. The general objective of the system is to develop a robotic system which strives to achieve a high level of emotional bond between humans and robot by exploring human love. Such a relationship is a contingent process of attraction, affection and attachment from humans towards robots, and the belief of the vice versa from robots to humans.
The advanced artificial intelligence of the system includes three modules, namely Probabilistic Love Assembly (PLA), based on the psychology of love, Artificial Endocrine System (AES), based on the physiology of love, and Affective State Transition (AST), based on emotions. The PLA module employs a Bayesian network to incorporate psychological parameters of affection in the robot. The AES module employs artificial emotional and biological hormones via a Dynamic Bayesian Network (DBN). The AST module uses a novel transition method for handling affective states of the robot. These three modules work together to manage emotional behaviours of the robot.
1. Introduction
Research in robotics ranges from industrial service targeting, optimizing practical systems in terms of accuracy and speed, to social robots with the goal of communication and interaction with humans. When it comes to interactions between humans and robots, a sense of attachment to objects will become an issue, so this triggers the idea that bi-directional emotional interaction between humans and robots might be needed in the future. This study introduces a new generation of robots, with the ability to love and be loved by humans. We refer to this as “Lovotics”, which explores the concept and possibilities of human-robot relationships.
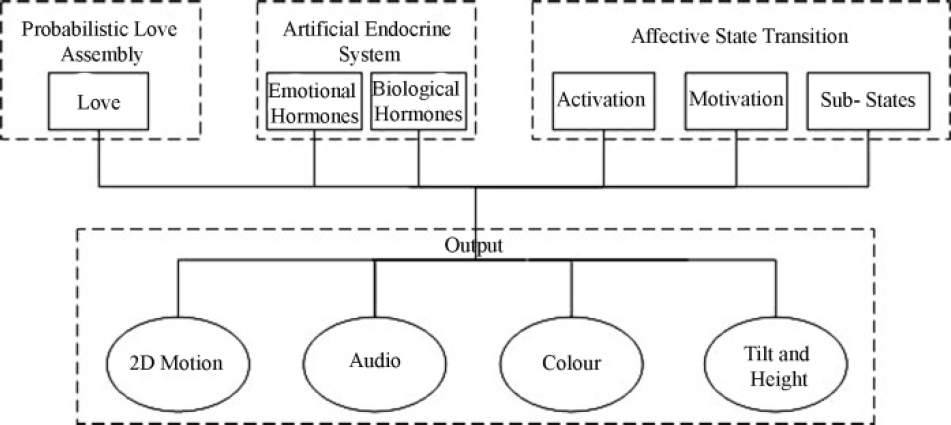
The Lovotics robot was designed and developed using several design theories for the hardware [1] and various novel algorithms for the software [2, 3]. The overall system structure of the Lovotics robot is presented in Figure 1. The system consists mainly of four input modules, which captures basic sensory data such as sound, vision, touch and acceleration. A separate pre-processing algorithm is designated for each input [4, 5], as the raw data needs to be prepared before being sent to the artificial intelligence module which computes the love probability, hormonal levels and affective states of the robot. The output generator is a separate layer which maps the internal state of the robot towards rational behaviour. Various behavioural patterns of the robot are represented using outputs generated by audio devices, motion devices and illumination devices. This paper explains the artificial intelligence module of the Lovotics robot.

The overall structure of the Lovotics robot
The artificial intelligence of the robot employs probabilistic mathematical models for the formulation of love. An artificial endocrine system is implemented in the robot by imitating human endocrine functionalities.
Thus, the robot has the capability of experiencing complex and human-like biological and emotional states as governed by the artificial hormones within its system.
The robot goes through various affective states during the interaction with the user. It also builds a database of interacting users and keeps a record of the previous interactions and degree of love.
The first step in Lovotics is to develop a deep understanding of the physics, physiology and emotions of the human being in order to model this in the robot.
Even though various fields have proposed ideas about the role and function of love, the current understanding about love is still quite limited. Furthermore, developing an affection system similar to that of the human being presents considerable technological challenges.
The proposed novel advanced artificial intelligence system of Lovotics includes an Artificial Endocrine System, Probabilistic Love Assembly and Affective State Transition modules.
The psychological unit of the Lovotics artificial intelligence calculates the probabilistic parameters of love between humans and the robot. Various parameters, such as proximity, propinquity, repeated exposure, similarity, desirability, attachment, reciprocal liking, satisfaction, privacy, chronemics, attraction, form and mirroring, are taken into consideration.
The physiological unit of the Lovotics artificial intelligence employs an artificial endocrine system consisting of artificial emotional and biological hormones. Artificial emotional hormones include Dopamine, Serotonin, Endorphin and Oxytocin. For biological hormones Melatonin, Norepinephrine, Epinephrine, Orexin, Ghrelin and Leptin hormones are employed which modulate biological parameters such as blood glucose, body temperature and appetite.
A wealth of information about a person's emotions and state of mind can be drawn from facial expressions, voice, gesture, etc. The affective system of the robot analyses system inputs to generate suitable states and behaviours for the robot in real-time. The affective system is modelled as closely to the human being as possible in order to be an emotionally engaging system.
The Lovotics robot is an active participant in the communication process, which adjusts its internal hormonal levels and affective states depending on inputs and feedback from the human over the long-term.
Lovotics should be considered as a multidisciplinary research field utilizing fundamentals concepts from philosophy, psychology, biology, anthropology, neuroscience, social science, robotics, computer science, engineering and artificial intelligence. The proposed approach provides a system allowing the development of functionalities based on multidisciplinary research yielding a new form of love relationships.
2. Background
In human beings, emotions are not computed by a centralized neural system and operate at many time scales and at many behavioural levels [6]. Human love and social bonding employ a push-pull mechanism that activates reward and motivation pathways [7]. This mechanism overcomes social distance by deactivating networks used for critical social assessment and negative emotions, while it bonds individuals through the involvement of the reward circuitry, explaining the power of love to motivate and exhilarate [8].
Human empathy probably reflects admixtures of more primitive affective resonance or contagion mechanisms, melded with developmentally later-arriving emotion identification and theory of mind/perspective taking [9].
Inspired by human affection functionality, a multimodal AI system is proposed for Lovotics which considers both short and long-term effective parameters of affection.
2.1. Probabilistic Love Assembly
Through many years of investigating human love, researchers have discovered several factors that result in human love. Among them propinquity, proximity, repeated exposure, similarity, desirability, attachment, reciprocal liking, satisfaction, privacy, chronemics, attraction, form and mirroring have been noted as some of the main reasons for love [10-18]. These effective factors could be taken into account in the robot to develop a systematic method for appraising the level of love between a robot and a human.

Schematic of the Probabilistic Love Assembly (PLA) module
2.2. Artificial Endocrine System
The natural endocrine system is a network of glands which works closely with the nervous system to secret hormones in the blood which affect the target cells to regulate homeostasis, metabolism and reproduction [19]. Hormones are chemical messengers that play a key role in the endocrine system to maintain homeostasis.
Different approaches to implement the artificial endocrine system for robotics have been proposed.
An adaptive neuro-endocrine system for robotic systems [20] presented an adaptive artificial neural-endocrine system that is capable of learning online and exploits environmental data to allow adaptive behaviour.
An artificial homeostatic system [21] presents an artificial homeostatic system devoted to the autonomous navigation of mobile robots, with emphasis on neuro-endocrine interactions. The artificial neuro-endocrine kinematics model for legged robot obstacle negotiation [22] provides insight into the possibilities afforded by a novel artificial neuro-kinematics network, constructed to primarily aid obstacle negotiation for a hexapod robot, MAX II. The challenges of designing nervous and endocrine systems in robots [23] is discussed in conceptual terms, taking into account the feasibility of designing a nervous system and an endocrine system in a robot, and reflecting upon the bionic issues associated with such highly complex automatons.
2.3. Affective State Transition
Different methodologies have been used for dealing with the internal state of the robot. State machine [24] and fuzzy state machine [25] are simple proposed methods for that purpose. A multiobjective evolutionary generation process for artificial creature's specific personalities was proposed, where the dimension of the personality model is defined as that of optimization objectives [26]. In that approach an artificial creature has its own genome in which each chromosome consists of many genes that contribute to defining its personality. As a biological approach, the finger blood pulse fluctuations are used for developing the online system to estimate a driver's internal state [27].
A large number of studies employed the OCC model [28] as the fundamental model of emotion. For example, it has been integrated for modelling the emotions in the embodied character [29] or to develop a distributed and computational model which offers an alternative approach to model the dynamic nature of different affective phenomena, such as emotions, moods and temperaments, to provide a flexible way of modelling their influence on the behaviour of synthetic autonomous agents [30].
TAME is a framework for affective robotic behaviour that deals with an exploratory experimental study to identify relevant affective phenomena to include into the framework in order to increase the ease and pleasantness of human-robot interaction. TAME stands for Traits,
Attitudes, Moods and Emotions, the four components of the personality and affect module that is responsible for producing affective behaviour [31, 32].
Machine intelligence needs to include emotional intelligence and demonstrate results toward the goal: developing a machine's ability to recognize the human affective state given four physiological signals and compare multiple algorithms for feature-based recognition of emotional state from this data [33].
Affective state transition can be designed as an emotional model. Energy and tension are known to be the two principal parameters for representing the emotions of a human being [34, 35]. Based on this fact, emotional categories can be mapped to arousal, valence and stance dimensions in a robot [36].
3. Methodology
3.1. Probabilistic Love Assembly (PLA)
The PLA module is employed to calculate the probabilistic parameters of love between a human and the robot. This module employs audio and touch as channels of interaction between the robot and humans as illustrated in Figure 2. The visual channel of the robot is employed for detection, recognition and expression analysis.
The following definitions are used for the PLA module:
Interactive zone of a robot is defined as an area in which a robot interacts with a human. It can be defined according to the physical properties of a robot e.g. size.
Interaction happens when a human is located inside the interactive zone of a robot.
Audio parameters include the number of harmonics, amplitude, pitch, tempo and envelope.
The following notations are also used:
u is the interactive radius of the robot according to the interactive zone.
C is the area of the environment.
T is the time of considering the system for computation in the PLA module
Based on psychological studies and the study of nonverbal behaviours, probabilistic mathematical models for the 13 identified factors of love were formulated to provide an interpretation of the intimacy between humans and robots. Such mathematical models can be presented by a Bayesian network depicting the relationship between love and its causal factors.

The robot and human spend time together if their distance is within the interactive zone and they are interacting.



The difference between human audio parameters (

By comparing the actual (
A human and robot are defined attached when the human stays within the interactive zone of the robot for a long time and the human touches the robot. Hence, the overall probability of attachment depends on both interaction (

The overview of the Bayesian network for Probabilistic Love Assembly (PLA) module
In the same manner, other probabilities can be calculated accordingly.

It can be modelled as a function of asynchronous similarity time, touch interaction time and audio interaction time.

Attraction: interpersonal attraction acts like a force drawing people together and influences the feeling of love [12]. Attraction between a human and a robot can be modelled as a function of time, force and area of touch:


According to the presented probabilistic nature of the above 13 parameters, a Bayesian network is employed to link audio, touch and location to these effective parameters in order to estimate the long-term probability of love. The proposed Bayesian network is presented in Figure 3. This Bayesian network analyses various causal parameters of love between the robot and the human that can be categorized into three groups:
Human and robot distance and their interaction. Synchronous and asynchronous audio parameters of the love between the human and the robot. Duration, force and area of the touch.
The above variables can be correlated with their conditional independencies via a directed acyclic graph to generate a probabilistic model that consists of location, audio and touch variables as system inputs, 13 causes of love as intermediate events and overall love probability as the outcome of the Bayesian network.
Emotional hormones

Biological hormones

3.2. Artificial Endocrine System (AES)
Hormones which are related to emotions and biological qualities according to the human endocrine system [37, 7] are utilized in the AES module of Lovotics.
Artificial emotional hormones, which include Dopamine, Serotonin, Endorphin and Oxytocin, are closely related to human emotions and presented in Table 1. Biological hormones Melatonin, Norepinephrine, Epinephrine, Orexin, Ghrelin and Leptin are employed to modulate biological parameters such as blood glucose, body temperature and appetite. Biological hormones and their effect on the AES module are presented in Table 2.
The level of emotional and biological hormones can be considered as internal variables of the artificial endocrine system. This system in nonlinear and can be expressed in the form of first-order differential equations as below:

Where,
The above nonlinear artificial endocrine system can be managed through the use of a Dynamic Bayesian Network (DBN) [38, 39]. There are four major layers in the DBN system, namely input, endocrine, emotional and behavioural layers. In the input layer, touch and audio are the two main preceptors with their respective parameters. In addition, internal situations of the robot such as battery life, motor conditions and networking situations are considered to regulate the biological hormones.
The endocrine layer consists of emotional and biological hormones. In the emotional layer six basic emotions and six moods are used to model the emotional situation. In the behavioural layer, tilt degree, vibration level, colour, 2D movement, 2D speed, rotation and height are output parameters of the robot. Lovotics DBN is illustrated in Figure 4.
3.3. Affective State Transition (AST)
The main two dimensions of emotion are considered as Activation (
Using the above affective space, a novel transition system is proposed which could handle the immediate emotional properties of the robot. This short-term emotional module cooperates with the two other AI modules of the Lovotics robot to manage the overall internal state of the robot.
In order to model the system to link interaction and affective states, the transition in the affective state space is formulated as below:

where
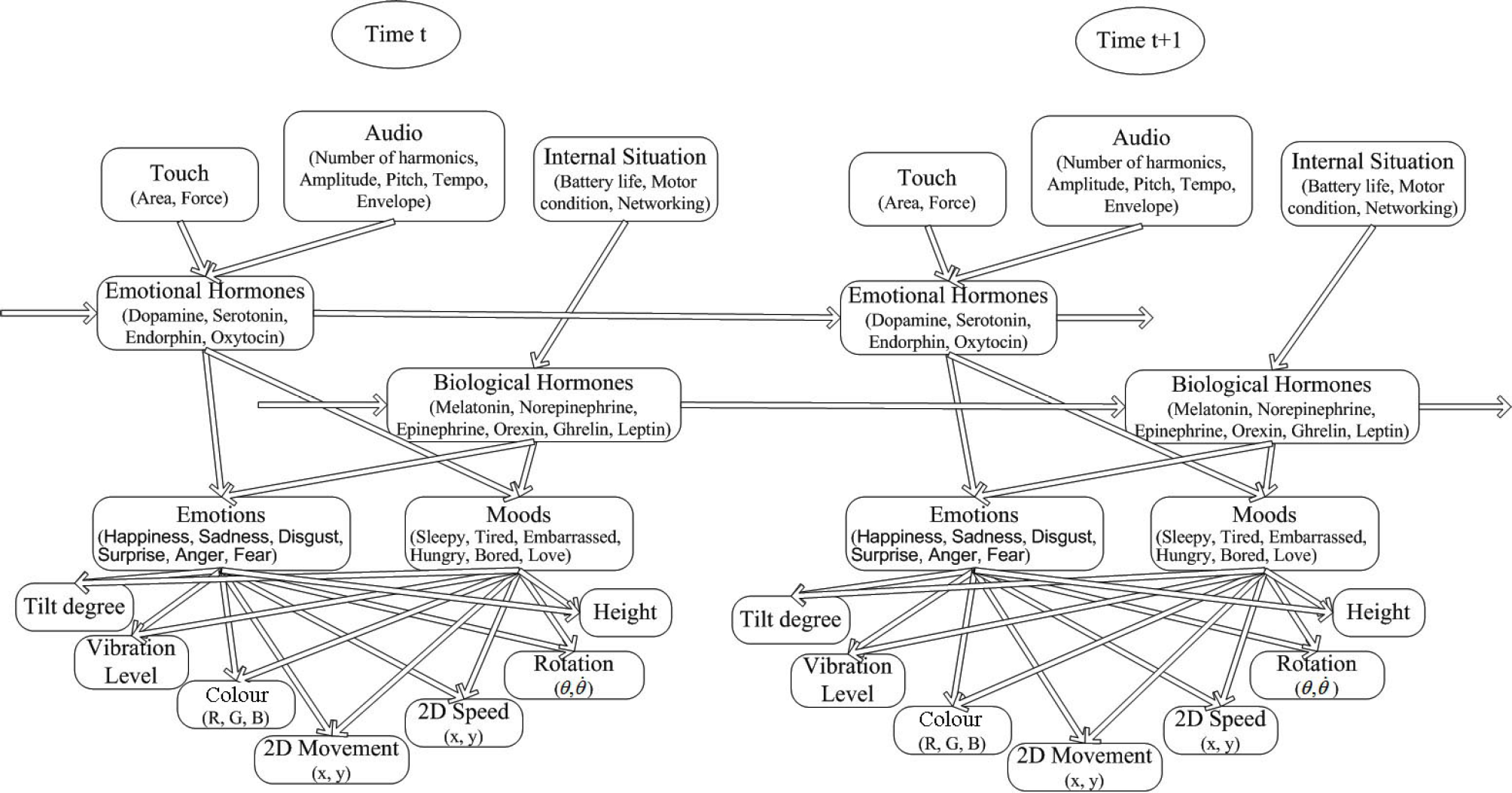
Dynamic Bayesian Network of Lovotics
Vector

where c, k ∈ℜ are constant numbers,
η is the adjusting parameter for the converging vector field.
β is the affective state coefficient which can be assigned to regulate the rate of changes in the affective state.
Γ is the learning rate.
The first two components are in the Activation – Motivation plane which are driven by emotional input:

where
The third component of

Where
Hence, the overall affective state formula, considering the interaction and transition methodology, can be presented as:

In this way, the short-term affective state of the robot can be generated for computing the immediate sentimental properties of the robot. Using this short-term affective property, the robot is capable of undergoing several affective states by employing the Affective State Transition module which handles transformations from one affective state to another. As presented, these transitions are based on previous states, current mood and interaction influences from the environment.
3.3. AI fusion
The artificial module of Lovotics robot, fuses data from three elaborated AI modules to control the overall behaviour of the robot as presented in Figure 5. In practice these three AI modules are connected to the output layer via a neural network system.
Fusion of the three AI modules of the Lovotics robot
3.4. Results
For initial testing of algorithms and to visualize the interactions of Lovotics, a simulator program is developed for Lovotics. This simulator includes a virtual model of the robot, humans and the corresponding interactions within the environment. The main interface of the simulator is presented in Figure 6.
In the Lovotics simulator a robot is placed between several humans and left to interact with them. During interaction in the environment, the levels of six biological and four emotional hormones change accordingly.
Furthermore, the probability of love between the robot and different interactants was being calculated dynamically in the PLA module as illustrated in the simulation environment in Figure 6.

Lovotics simulator. Right: simulated model of the robot's environment. Left: (from top) emotional and biological hormones levels and the probability of love between the robot and humans in the environment.
Figure 7 shows how the affective state of the robot and the probability of love were changing during interaction.
Values of activation, motivation and sub-state were changing during the interaction, and the probability of love between the robot and certain humans was increased during two hours of interaction in the simulator.
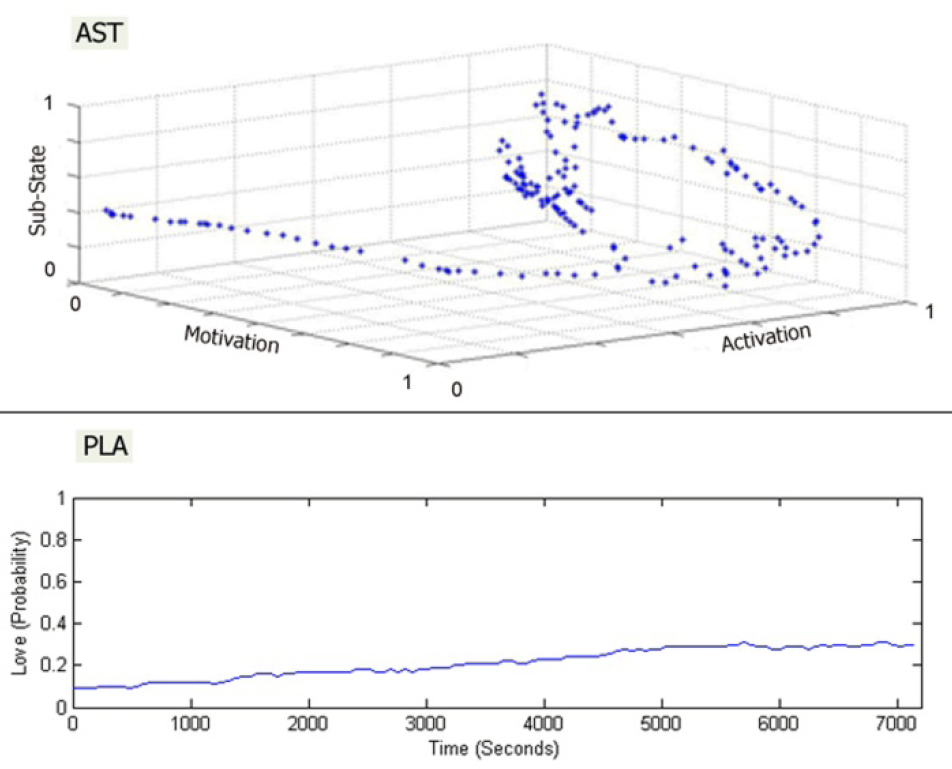
Changes in the AST (top) and PLA (bottom) modules of the robot during interaction in the Lovotics simulator
A robot was successfully designed and developed as an affective agent in social interactions. The robot is designed to inculcate love with humans, as well as express emotion via artificial nonverbal behaviour. An artificial intelligence system was developed to help realize the presentation methods of the robot and systematically implement the design into a robotics system. Figure 8 shows the design of the Lovotics robot.

The hardware structure of the robot
The graphical user interface (GUI) of the Lovotics software is presented in Figure 9. The Lovotics GUI is also accessible via a remote connection while the robot is in operation.
The left part of the GUI represents values of input parameters after being evaluated by each pre-processor module. Data from the accelerometer for localization and touch sensors for tactile input is presented first, then the interactant's face is detected and recognized with confidence level and audio input parameters such as pitch. The middle part of the GUI represents the PLA and AST values of the AI modules.

Graphical user interface of Lovotics
The 13 related parameters of the PLA module and probability of love with the detected person is presented. The affective state parameters are also presented in this section. The right part of the GUI serves to display the output of the robot, which reflects the current behaviours and emotion of the robot, including RGB data of LEDs, omni-wheel movements and servo motors for deforming the outer cover. Values of hormones in AES module are also presented in this part.
The Lovotics robot is shown during interaction in Figure 10. Videos of the robot are available at the Lovotics website (www.lovotics.com).
4. Conclusion
The novel advanced artificial intelligence system of Lovotics was presented which includes three modules, namely the Artificial Endocrine System (AES), which is generally based on the physiology of love, the Probabilistic Love Assembly (PLA), which is based on the psychology of love and Affective State Transition (AST), which is based on emotions. Inspired by the science of human love, these modules were designed and developed by employing artificial intelligence methods like Bayesian networks. These three modules work closely together in order to generate realistic behaviours by the robot.
By employing this artificial intelligent system, we have developed an intelligent robotics system, capable of emulating the love process of a human being, to establish long and meaningful relationships with humans. This holds potential for creating robots that can form meaningful bi-directional bonds with humans based on a level of emotional intelligence that is still lacking from robots today.

Lovotics robot during interaction
Lovotics could lead to a revolutionary love relationship between humans and robots, via real emotive actions such as kissing or hugging. In the future, these more intimate and close interactions can be incorporated in the robot to further enhance the experience of love between humans and robots.
Lovotics introduces a novel interactive robot, with a focus on inculcating intimacy with humans via a slow communication process. Through long-term interaction with the robot, interactants build up an emotional attachment with the robot. This could create a new form of bi-directional relationship between humans and robots.
The aim of this system is to pave the way to creating personal relationships between humans and robots in the form of Lovotics, to exhibit love between humans and robotics. Lovotics introduces an interactive method which focuses on inculcating intimacy with humans.
This holds potential for creating robots that can interact with humans at a level of emotional sophistication that is still lacking from robots today.
Users experience responses based not only on immediate inputs, but also on prior interactions and relationships with particular humans. Constant close interaction with the robot can lead to a more intimate relationship. For example, if a new user strokes the robot, it may lead to a lower level of reciprocation when compared to similar action by a person familiar to the robot. Interactions are also influenced by parameters derived from the robot's internal state.
The next step is to conduct extensive qualitative fieldwork to help gather more data about user responses to the present developed robot and compare these with other forms of robots. Using this information, it will be possible to further redesign the robot to better evoke the sense of nurture and care within the robot and humans, thus further developing their love relationship.
Along with the development of the robot itself, we must try to understand and define the role of this new genre of robots in the social and cultural context. It is difficult to predict what the relationship will be between humans and robots in the future, and tough questions such as ‘How does this change our definition of love?’ or ‘Is this kind of love appropriate?’ need to be addressed. The way to do this is to continue this study via an exploration of ‘love’ and study how man and machine are evolving new identities and relationships, and in this, create a range of Lovotics robots to tackle these issues.
Footnotes
5. Acknowledgments
This research is carried out under CUTE Project No. WBS R-705-000-100-279 partially funded by a grant from the National Research Foundation (NRF) administered by the Media Development Authority (MDA) of Singapore.