
Abstract
Standard underarm or forearm crutches have some drawbacks induced by their rigid legs. Spingloaded crutches can reduce the impact effect. However, whether or not they also improve propulsion is an open problem. We formulate a problem of the optimal performance of spring-loaded crutches and propose a numerical approach to solve the problem. Then, the numerical optimal values are incorporated to the innovative design of a pair of spring-loaded crutches. To evaluate the crutches' performance, we have conducted standard biomechanical experiments for a number of male subjects under two conditions: walking with standard crutches and with spring-loaded crutches. Three dimensional kinematic data and ground reaction force were recorded and analysed. It was observed that optimized spring-loaded crutches can efficiently propel the crutch walkers, which conforms to the theory.
1. Introduction
Underarm or forearm crutches are common assistive devices that aid people's ambulation with various walking problems. For example, when a patient with an injured leg cannot perform biped walking (Alexander, 1995; Srinivasan & Ruina, 2006) with both legs, the upper extremities with crutches can play the role of a normal leg during ambulation (see Fig. 1). Therefore, ambulation with crutches is also a dynamical process of biped walking (Requejo, 2005). Forearm crutches and their underarm counterparts have their distinct advantages from the patients' point of view—the former are convenient to use and the latter are easier to control gait and have higher standing stability. Without loss of generality, this research only deals with underarm crutches and the same idea applies for forearm ones.

A model of ambulation with spring-loaded crutches.
Standard underarm crutches have rigid legs, originating from wooden sticks used for aiding ambulation in the past. Fig. 2(a) illustrates the trajectory of a walker indicated by his or her armpit position and its momentum change. Even though rubber crux and cushion pad are used to reduce the initial impact, it is unavoidable that reaction forces with fast rising rates are yielded at initial contact and transmitted to the wrists, elbows, and shoulder joints (Opila et al, 1987a, 1987b). The impulse may cause discomfort and even lead to diseases such as crutch palsy, aneurysms and thromboses (Subramony, 1989; Raikin & Froimson, 1997; Feldman, 1995; Gil-Agudo, 2009; Ginanneschi et al, 2009).

An illustration of crutch stance with three types of crutches where the superscripts ‘-’, ‘+’, and ‘++’ represent respectively body momentums immediately before crutch-body interaction, after initial contact, and right after crutch-body interaction—(a) A rigid crutch reduces the initial momentum due to an impact along the crutch axis and does not propel the body over the stance; (b) A spring-loaded crutch with an undesirable spring stiffness reduces the initial momentum and yields an insufficient momentum because of effects such as bad timing and bouncing back and forth; (c) An optimal spring-loaded crutch with a desirable spring stiffness not only reduces the initial momentum but also boosts the momentum at the right direction and amount leading to a convex-shape trajectory.
An alternative is the use of spring-loaded crutches (Herr, 1995; Davis, 2005) as is illustrated in Fig. 2(b). These crutches incorporate a certain compliant mechanism that contracts or extends under loads. Hence, they alter the way loads are transmitted to the body during a dynamical gait cycle. It was found that they reduce the initial peak load by one fourth and the average amplitude of the initial force by one fifth (Parziale & Daniel, 1989; Segura & Piazza, 2007). As a result, the shock-absorbing feature increases comfort by reducing stress, soreness and pain. Another feature of spring-loaded crutches is that propulsion of the body at the end of crutch gait might reduce the consumed metabolic energy (Parziale & Daniel, 1989). However, the existing spring-loaded crutches cannot guarantee propulsion at the right time and position because elastic elements are designed by trial and error as shown in Fig. 2(b). The energy absorbed in the elastic elements may be released back at an inappropriate time and position. For example, when the elastic spring is too stiff, the initial contact would yield a large impulse, injecting back the body; when the elastic spring is too soft, the generated propulsion would be insufficient. As a result, the propulsion mechanisms of these designs are not optimized and an optimized design is needed to improve the performance of spring-loaded crutches. To the best of our knowledge, the research in this area is still at a very early stage.
An effective optimization approach must take into account the dynamics of ambulation. Hence, a type of open loop optimal control problems is envisaged. To this end, this research formulates a boundary value problem of ambulation with spring-loaded crutches during crutch-stance. A revised shooting method is proposed to find the optimal spring stiffness that meets the specified boundary values. According to the optimization principle, a pair of spring-loaded crutches are made. Both numerical simulation and experiment are carried out to evaluate the proposed method based on a novel design of spring-loaded crutches.
2. Problem Formulation and Methodology
The key property of spring-loaded crutches is the stiffness of the elastic spring. To find the optimal stiffness, an optimal problem is formulated and its solution method is proposed based on the dynamics of ambulation with spring-loaded crutches.
Similar to a normal human gait cycle (Winter, 1990), a gait cycle in ambulation with spring-loaded crutches consists of the following four phases: (a) crutch swing when the user's body revolves about the stance foot/feet; (b) brief double support where both legs and crutches support the user's body and toe-off provides propulsion; (c) crutch stance where the user's body revolves about the stance crutches; (d) foot strike where the user's feet contact the ground relieving the load upon the body.
The optimization procedure is developed based on the dynamics of crutch stance. To study the effect of toe-off, forces and torques yielded by toe-off are also modelled in the dynamics. Foot-strike is not a cause of crutch walking but an effect that is ignored in the model.
2.1 Equations of Dynamics
A dynamical model is developed to represent crutch stance as shown in Fig. 1. In the model, a point mass m is used to represent the user's total mass. The mass is articulated by an elastic and massless pole that represents a pair of spring-loaded crutches. The tip of the crunches on the ground performs as a pin-joint. The model of ambulation with spring loaded crutches is affected by gravity, the elastic spring damping and toe-off. When toe-off is included, both double support phase and crutch stance phase are implied.
Let F
crutch
(t) be the force yielded by the deformed spring, F
toe-off
(t) and T
toe-off
(t) are force and torque yielded by toe-off, and F
damping
(t) is force yielded by the cushion effect of body and crutch. Define a state vector x(t) = (θ(t),ω(t), r(t), v(t))
T
and assume that T
toe-off
(t), F
damping
(t) and F
toe-off
(t) be known functions of time t and states x(t). We consider a force function of spring-loaded crutches as

The dynamics can be expressed as
Applying Euler-Lagrange's equations in analytical mechanics gives us a concrete expression of Eqn (2)

2.2 Boundary Value Problem and Optimal Control Problem
The dynamics of crutch stance without dissipation and toe-off is used to investigate the optimization of the spring stiffness k. In other words, T toe-off (t), F damping (t) and F toe-off (t) are excluded in optimization because damping, a counterproductive effect, is negligible and toe-off is exerted only at step to step transition. Then, optimization can be performed rigorously because the reduced dynamics is influenced only by the initial conditions and the spring stiffness.
The desirable crutch stance implies the following governing rules referring to Fig. 2(c).
Rule 1: Zero deformation of spring-loaded crutches holds at t1 and t2, i.e., r(t1) ≡ r(t2) ≡ L.
Rule 2: Spring-loaded crutches are compressed over (t1, t2) i.e., r(t) < L for (t1, t2).
Rule 3: An effective stance about the crux implies θ(t1) < 0, θ(t2) > 0, v(t1) ⩽ 0, v(t2) ⩾ 0, ω(t1) ⩾ 0, and ω(t2) ⩾ 0.
Rule 4: The trajectory of r(t) is convex over (t1, t2).
Rules 1–3 imply that the desirable dynamics of crutch stance meets specific boundary conditions at t1 and t2. Rule 4 represents the desirable crutch stance. We define a boundary value problem and then formulate an optimization control problem.
For convenience, let two sets

2.3 The Revised Shooting Method for Optimal Crutch Stance
As there is no closed form of a cost function to be penalized, whether or not the standard optimization tools (Andreasson et al, 2005) are applicable to this case requires further investigation. As an alternative tool, the shooting method is applied that is a common tool to solve two point boundary value problems of a dynamical system (Stoer & Bulirsch, 1980). It is an iterative procedure. For each step of iteration, an initial value problem is solved based on a guess of an initial variable. The guess is updated in next step based on the discrepancy of the obtained final condition to the specified final condition. The iteration stops when the specified tolerance is satisfied. The shooting method is revised to cater for the optimization problem by tuning the control variable k instead of an initial condition upon a specific s
initial
. Linear interpolation is used to update k to reduce the number of iterations. Let symbol ‘^’ denote the estimate value of a parameter and a subscript ‘i’ indicate the i-th iteration in the shooting method. The updating function to k̂ is

3. Numerical Results and Analysis
3.1 Numerical Results
The optimal values of spring stiffness are obtained for small, medium and large size users with respect to different step lengths and cadences. The users' sizes are defined in terms of mass and crutch length without loads (see Table 1). Different values to s initial and s final are specified (see Table 2) corresponding to different step lengths and cadences. Let ΔL = 0.06 (m) denote the elongation of the preloaded spring in Equation (1).
A list of users' sizes.

A list of different boundary conditions where is given in Table 1.

MATLAB 6.5 is used as the platform to develop codes for optimization, where MATLAB function ‘ode45’, a Runge-Kutta method, is taken as a solver to the initial value problem associated with the boundary value problem in each optimization task. An optimization task completes when the specified tolerance ɛθ = 0.01 (rad) is satisfied. The optimal value is acceptable if the desirable gait trajectory is generated as shown in Fig. 2. Otherwise, one must try a different initial guess of k. Thus, simulation plots are used to visually inspect whether or not a desirable gait trajectory is yielded.
Fig. 3 shows the optimization process for Case A and Medium size starting from two different initial guesses. Each initial guess leads to a solution to the initial value problem. Grey dotted lines represent the solutions which do not meet the specified boundary conditions and the trajectories that do not match with Fig. 2(c). Therefore, these springs are not optimized. After a few iterations, the trajectory r(t) converges to a profile similar to the desirable one in Fig. 2(c) and Rules 1–4 are satisfied. The optimal control value k = 1950 (N/m) is found as it yields the optimal walking performance.
Simulation results for solving the boundary value problem with respect to Case A and Medium size: where the dotted lines represent unmatched trajectories of the intermediate steps of iteration corresponding to non-optimized springs; where the solid lines represents solution of the boundary value problem corresponding to optimized spring k = 1950(N/m).
Trends (a-c) are very helpful for allocating the crutch stiffness to an appropriate range for a user with certain size and gait pattern. The last trend shows that the same spring stiffness can be used by different users because they can adjust gait patterns. However, a slightly larger value will be used in practice due to the trade-off of the lateral stability.
We conclude a guideline to use the optimal procedure and its results (e.g., Table 3) in designing or choosing spring-loaded crutches for a user as follows: (a) Give an estimate of initial conditions (after toe-off) with respect to the user's own desirable gait pattern; (b) Obtain the optimal spring stiffness based on the estimated initial values; (c) Choose spring-loaded crutches in the vicinity of the optimal spring stiffness according to the trends. It is noted that data for different users overlap and the optimization values are not very sensitive to a user's weight.
Optimal values under a preload condition.

3.2 Analysis of Toe-off and Dissipation Effect
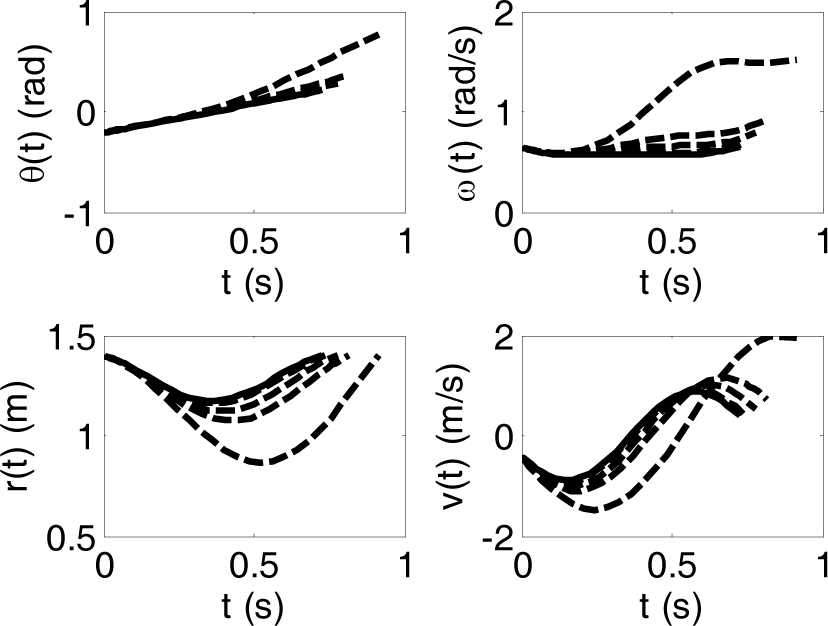
As the initial conditions of crutch stance are required prior to optimization, understanding how toe-off affects the dynamics would give a good estimate of initial conditions of crutch-stance. We take k = 1950 (N/m) with respect to Case A and the medium size user as an example and perform simulations to analyze the effect of toe-off and dissipation. We assume that the torque and force due to toe-off have fixed profiles as shown in Fig. 4. Such toe-off is considered reasonable, roughly analogous to the profile of toe-off forces of a normal walking gait [17] where the peak vertical toe-off force is slightly higher than the user's body weight, 687 (N). Furthermore, we assume a viscous damping force, about one tenth of toe-off in terms of peak amplitude, to reflect that a small percentage of mechanical energy dissipates through the user's wrists, arms and shoulders. Let T damping (t) = 100v(t) for v(t) < 0 (otherwise, T damping (t) = 0). It is also interesting to compare ambulation with spring-loaded crutches with that of standard rigid crutches. Therefore, it is assumed that r(t) ≡ L holds and v(t) reduces to zero after the initial impact, where the associated mechanical energy mv2(t)/2 is dissipated through the user's wrists, elbows and shoulders.
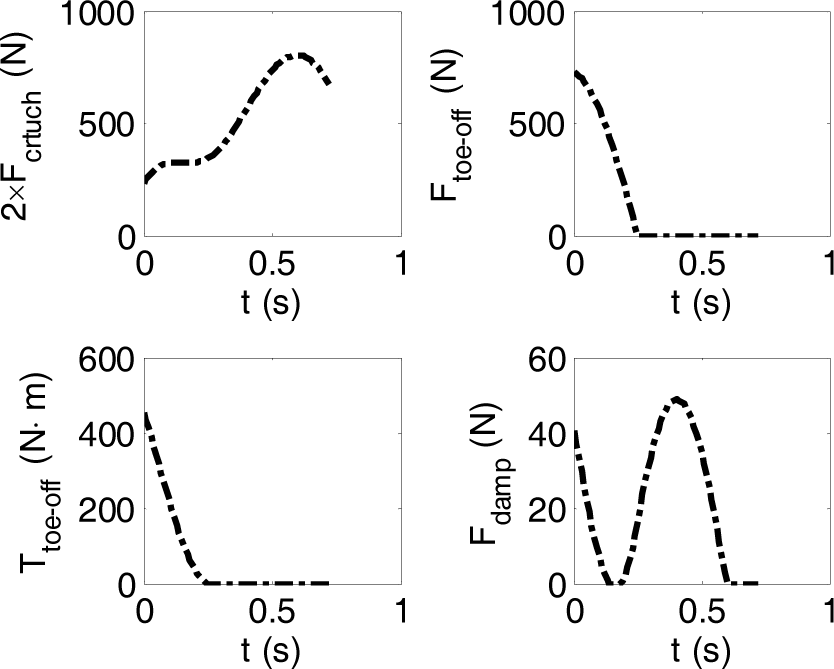
The dashed lines are the forces with respect to Case (c).
The simulation results are shown in Fig. 5. It is observed that the trajectory r(t) of Case (b) is above that of Case (a) because the energy being stored in the crutches is reduced due to dissipation. Hence, the damping force is undesirable as it causes the user fatigue. The trajectory v(t) of Case (d) indicates that the linear velocity along the rigid crutch axis reduces to zero after initial impact, incurring a loss of the total mechanical energy mv2 (t)/2 absorbed by the user's body. As a result, speed in the forward direction reduces, which leads to the conclusion that the rigid crutches are inferior to the optimized spring-loaded crutches in terms of the energy efficiency. It is shown that the trajectory r(t) of Case (c) is well above those of Cases (a) and (b). Therefore, toe-off has an effect of propelling the body up and forward and performs positive work that influences significantly the initial states and reaction forces of crutch stance. Trends of the toe-off effect are observed from Fig. 4 and Fig. 5. First, toe-off from 0–0.25 seconds postpones the loading on the crutches (see Fig. 4). Second, toe-off increases the axial velocity away from the crutch (see the curve v(t) in Fig. 5) and the angular velocity that make the stance hasty (see the curve ω(t) in Fig. 5). Third, toe-off decreases the initial angle of crutch stance and the stance period before mid-stance also reduces (see the curve θ(t) in Fig. 5). These trends guide us to give a good estimate of the initial conditions of crutch stance for optimization. For example, under the influence of toe-off, initial values at the vicinity of Case B in Table 2 tend to translate to values at the vicinity of Case C in Table 2, leading to a stiffer spring as those of Case C in Table 3. Then, an estimate of initial values should be Case C instead of Case B.

The solid lines denote the simulation results of Case (a): without damping and toe-off forces; the dotted lines ‘…’ denote the simulation results of Case (b): with the damping force and without the damping force; the dashed lines ‘-.’ denote the simulation results of Case (c): with both damping and toe-off forces as shown in Fig. 4; the solid triangles ‘▲’ denotes the simulation results of Case (d): rigid crutch stance without damping and toe-off where the loss of energy due to the initial impact is assumed to be absorbed by the user.
4. Optimized Design of Spring-Loaded Crutches
A pair of spring-loaded crutches was designed as shown in Fig. 6. Compared with other spring-loaded crutches, the crutches have novelties: 1) the optimized spring based on Table 3 is selected to improve the performance; 2) the constraint on the sliding joint is adjustable to increase the stability in difficult situations, provide a different preload to the spring, and even locking the compliant mechanism; 3) the handgrip and frame are tunable to accommodate different users' heights or arm lengths.

The design of an optimized spring-loaded crutch, where a sliding joint provides a compliant mechanism subject to a hard constraint, an optimized spring is used to regulate ground reaction forces, and handgrip and frame positions are adjustable to accommodate different users' heights or arm lengths.
From a practical point of view, an optimal spring is suitable for users with a certain range of weights and sizes if they adjust their gaits (see Table 1). Therefore, it is not necessary to change springs for each user. To avoid the lateral instability, it is recommended that the spring stiffness be chosen a bit higher, the length of the constraint be reduced if necessary, and a larger preload be used. For example, adding 1~2kN/m to the optimal value of spring stiffness, reducing the constraint to a length less than 0.07m, and applying a preload 100~200N improve the lateral stability.
5. Experiments
5.1 Materials and Methods
Seven healthy male subjects (age range: 23–34y; heights: 1.71–1.80m; weights: 58–88kg), free of musculoskeletal problems and who had not used crutches in the previous 6 months volunteered as subjects. The selected subjects were suitable to the size of a pair of optimally-designed spring-loaded axillary crutches. When the sliding joint of the developed spring loaded crutch is locked, it acts as a standard crutch. The spring-loaded crutch has a preload of approximately 160N to improve stability. The spring stiffness was 4.5kN/m.
Experiments were carried out at the Biomechanics Laboratory of the Department of Sports and Exercise, The University of Auckland. The experiment protocol was approved by The University of Auckland's Human Research Ethics committee. A large Bertec force plate was used to measure the ground reaction forces during crutch walking, with a sampling rate of 1000Hz. Kinematics of subjects and crutches were recorded by using an 8-camera VICON digital video-based motion analysis system (Oxford Metrics, Oxford, UK). Two spherical reflective markers (14mm in diameter) were placed on the right crutch above and below the sliding joint to monitor spring deflection. Four markers were placed at the shoulder joint, hip joint, knee joint and ankle joint on the right side of the body to record their positions (Fig. 7).

A subject with spring-loaded crutches standing on the force plate form.
Before data collection, subjects were taught proper axillary crutch walking technique, and instructed to walk in a way that was most comfortable and efficient for each type of crutches. Subjects practiced for 20 minutes to familiarize themselves with both standard crutch gait and spring-loaded crutch gait. Each subject was asked to perform 10 acceptable trials by walking over the force plate with a right-leg-support and swing-through crutch gait using standard crutches. A trial was considered acceptable if both crutch tips contacted the force plate and the subject cleared the force plate without striking it again. Then, each subject was asked to perform another 10 acceptable trials with spring-loaded crutches. Each trial was performed at the subject's self-selected walking speed.
Force and marker coordinate data were low-pass filtered with a cutoff frequency of 45 Hz and 12 Hz respectively by using a fourth-order Butterworth filter. The crutch gait cycle (or crutch stance time) was defined by the period from crutch-tip strike to crutch-tip strike. Crutch-tip strike was identified as occurring at the first frame for which ground reaction forces rose above a 10N threshold and crutch-tip clearance as occurring at the last frame for which ground reaction forces dropped below a 10-N threshold. Based on measured kinematic and force data, spatiotemporal gait parameters including walking speed, walking cadence, stride length, stride time and crutch walking step length were determined using Vicon Clinical Manager Software (Oxford Metrics, Oxford, UK).
During walking, external mechanical work is equal to the work performed by external forces from the ground to move the center of mass (COM) through a displacement. In our study, COM position is reordered by the coordinates of the pelvis markers, and the ground reaction forces was measured by force plate. The external work includes both positive work and negative work. The positive work represents propulsion effect the crutch has on the human body, and the negative work represents the energy loss during contact. To represent the effect of the propulsion of the crutch to the human body, we only calculated the positive work, determined by the integration of positive power, which is equal to the dot product of two vectors: the external force acting on the limb and the velocity of the center of mass (COM). The external work (W) is calculated as

Stored elastic energy was transferred to mechanical energy to propel to the body during walking with a spring-loaded crutch. To quantify this effect, the stored elastic energy of the spring (E) was calculated using the following equation

A one-way analysis of variance (ANOVA) was performed for spatiotemporal parameters under two conditions (standard crutch walking & spring-loaded crutch walking). The Shapiro–Wilk test was performed to test the normality of the data, and the level of statistical significance was set at equal to 0.05 for all tests.
The profiles of the GRF trajectories with each type of crutches were consistent across subjects. Fig. 8 shows the GRFs in the anterior-posterior, medial-lateral and vertical directions for all trials from subject 1. The profiles of the ground reaction forces in the two walking conditions (standard crutch VS. spring loaded crutch) have similar patterns in the anterior-posterior and medial-lateral axes. The anterior-posterior ground reaction forces changed signs when the crutches crossed through the transversal plane of the crutch-tips, which marked the phase of mid-stance. The vertical ground reaction forces in ambulation with optimized spring-loaded crutches were one-peak profiles in contrast to two-peak profiles with standard crutches. Results clearly showed that the first peaks with standard crutches occurred before mid-stance and the second ones after mid-stance. The single peaks for the spring-loaded crutches were closer to mid-stance than the first peaks with the standard crutches were.

Ground reaction forces for subject 1. Time was normalized to 50 frames. Force (x), Force (y) and Force (z) represents the ground reaction force components in the anterior-posterior, medial-lateral and vertical directions respectively (shaded areas = + 1 standard deviation). The two vertical dashed lines mark mid-stance time.
There are no significant differences between any of the spatiotemporal parameters for the two conditions (Table 4). In the trials using the spring-loaded crutch the mean values of walking speed, stride length, stride time, and crutch walking step length are slightly higher than those in standard crutch trials.
Spatiotemporal variables for spring-loaded and standard crutches.

The values of external work and elastic energy show large variances among subjects (Fig. 9). For individual subject, however, the value of external work is much higher with spring-loaded crutches than with standard crutches. It is also noted that the transferred elastic energy has a major contribution to the overall external work for the spring-loaded crutch results.

The magnitude of the external work across each condition for six subjects (subject 6's data is not included because his pelvis marker's coordinates were not recorded for most of his trials). Bars indicate 1 standard deviation.
6. Discussion
Because the working mechanism of the spring-loaded crutches is governed by Equation (3), the convex profile of vertical experimental ground reaction force of springy crutches in Fig. 8 is equivalent to the convex profiles of the desirable crutch walking in Fig. 2 and simulation results in Fig. 5. Therefore, the theory, numerical results and experimental results agree with each other. It is noticed that the optimized values of spring stiffness in Table 3 correspond to a large deformation of the springs. The excessive change of in-line springs that might be make it hard for some users to control the crutch gait. First, the concern on the excessive deformation is eased due to the action of toe-off of the trailing leg which performs a positive work to lift the body upward. It is hypothesized that a habitual crutch user exerts a large toe-off to reduce the rigid crutch impact to the upper extremes. In practice, the change of in-line springs without any physical constraint is about 0.07~0.10m. Second, to increase the lateral stability, a physical constraint mechanism was incorporated in the design of spring-loaded crutches. Third, the optimized values of spring stiffness in Table 3 overlap for users with different sizes as long as the users adjust a little bit of the walking speed and step length. A larger stiffness in the range of optimized results could be chosen in the design. Finally, the increase of pre-load reduces the degree of deformation at mid-stance with a trade-off to the initial impact. In summary, the degree of the spring deformation at crutch stance can be altered to meet the requirements of a user. Underarm crutch frames can be replaced by forearm crutch frames, leading to spring-loaded forearm crutches.
When comparing the performance of standard axillary crutches and optimized spring-loaded crutches through biomechanical experiments, the most significant finding is the differences in GRF trajectories and mechanical energy expenditure between the two types of crutches. These differences reveal two distinct crutch-walking mechanisms, which require further evaluation. The experimental results are analyzed as follows.
It is generally acknowledged that crutch walking is characterized by an inverted pendulum mechanism of energy interchange. During the single leg support phase, the rigid pendulum conserves mechanical energy, and the COM can be supported with no muscle force. During the transition from one inverted pendulum to the next, some energy is lost during foot contact. To regenerate COM movement, external mechanical work is required to propel the COM forwards. For normal human walking, this push-off effect is mostly powered by the ankle muscles, with elastic energy potentially playing a large role. For walking with a pair of standard crutches however, the crutch walker must use their upper extremities to generate force for push-off, which can lead to overuse of upper extremity muscles. The initial motivation for the spring-loaded crutch design was to compensate for this effect by using elastic energy to assist in the push-off phase, emulating the role of upper extremity muscles.
The differences of the two aforementioned push-off mechanisms are illustrated by the GRF profiles (Figure 3). In this study, two peaked profiles of vertical ground reaction forces were observed during ambulation with standard crutches, which was similar to those vertical GRF patterns in normal human walking. The first peak happens prior to mid-stance, representing the effect of the impact force between the crutch and ground. During this stage, the GRF does negative work and mechanical energy was lost during landing impact. After mid-stance, similar to the toe-off stage in normal human walking, a second peak represents a forward push from the upper extremities to move the whole body forward. During this stage, the GRF does positive work and mechanical energy is gained. In contrast, for the GRF trajectories in ambulation with optimized spring-loaded crutches, only one peak is observed in the reaction force profile, and it occurs at mid-stance. The reason for the single peak profile is that, first, the spring reduces the magnitude of the impact during the initial contact phase, and, second, the stored elastic energy during impact stage is transferred to mechanical energy to propel to the body after mid-stance, with no extra push-off being exerted after mid-stance.
The effect of these two different push-off mechanisms is also shown by the results from external mechanical work. The external work was observed to be significantly higher with spring-loaded crutches than with standard crutches for all subjects and the transferred elastic energy makes a significant contribution to the total external work (Fig. 9). As a result, average step length is increased from 0.85m to 0.88m. The results show that the effect of the propulsion from the spring is more effective than that of the push using standard crutches. The calculated mechanical energy also gives an indication of metabolic energy expenditure as there is close relationship between metabolic energy cost and mechanical energy expenditure during walking. External work has been found to account for approximately one-half of the metabolic energy expenditure during walking in the literature. As previously discussed, the stored elastic energy during the impact stage was transferred to mechanical energy to propel to the body forwards after mid-stance, and no extra push-off was exerted. Given this information, our results support the hypothesis that spring-loaded crutches can help reduce metabolic energy demand as it reduces external work.
Our results are not in accordance with the results of a similar study in (Segura & Piazza, 2007) that measured GRFs and spatiotemporal parameters during walking with standard axillary crutches and spring-loaded crutches (k=22.4kN/m). Their results showed the GRF trajectories to be highly variable between subjects, and across trials of the same subject. Some trials exhibited two force peaks, some only had a single peak, and others had a force plateau. The stride time was significantly higher and the walking velocity was significantly lower during trials using spring-loaded crutches than with standard crutches. We conclude that the differences observed between the two studies were influenced mainly by the different spring stiffness. Greater spring stiffness would cause a rebound effect during crutch stance and lead to jerky and unstable movements. This may be the reason that only four of the ten participants in Segura and Piazza's study preferred using spring-loaded crutches over the standard crutches. The use of the optimized spring-loaded crutch used in the present study reduced this effect. With practice, all subjects in this study could avoid rebounds during crutch stance and they all preferred the spring-loaded crutches. Results for all spring-loaded trials show a single GRF peak profile (Fig. 8). No significant differences between spatiotemporal parameters were found between the spring-loaded and standard crutch trials. Therefore, the optimized spring-loaded crutches could improve the walking performance of habitual crutch users recovering from injury and being able to control the crutch gait.
There were several limitations for the present study. The major limitation is that we recruited a small number of healthy male subjects rather than habitual crutch users and those subjects practiced for only 20 minutes with each crutch type before data collection. The second limitation is that energy measures were calculated for to the crutch stance period based on a simplified mechanical model such that extra energy consumption for posture control is not taken into account.
7. Conclusion
The boundary value problem and its solution method are proposed to optimize the spring stiffness of spring-loaded crutches in order to yield the desirable ambulation with these crutches. The optimized springs are incorporated into the design of a new pair of spring-loaded crutches. Both simulation and experiments have been carried out. Results show that the proposed method is effective, efficient, and insightful. The experimental results demonstrate that optimized spring-loaded crutches provide an effective propulsion mechanism which has not been found in experiments with other crutches. In addition to the shock absorbing feature, the propulsion mechanism gives the spring-loaded crutches a further advantage over standard crutches. As a result, people with disabilities may choose to use these crutches over the traditional variety. The propulsion effect in this study may reduce the total metabolic energy expenditure in crutch walking, and it is expected that further work will be conducted to quantify this.
8. Acknowledgments
The authors are thankful to all participated subjects and the colleagues in Nissan-Dongfeng Motor Corporation who manufactured prototypes of spring-loaded crutches. They are also thankful to Professor Iven Mareels and Professor Marcus Pandy for the discussion of biped walking mechanism.