
Abstract
Hysteresis exists in magnetic shape memory alloy (MSMA) actuators, which restricts MSMA actuators’ application. To describe hysteresis of the MSMA actuators, a hysteresis model based on the radial basis function neural network (RBFNN) is put forward. Then, an inverse RBFNN model is set up, and it is compared with the inverse model based on the traditional cut-and-try method. Finally, to solve hysteresis of the actuators, an inverse model for MSMA actuators is used to build feed-forward controller. Simulation results show the maximum modeling error for inverse hysteresis model designed by neural network is 0.79% and compared with traditional cut-and-try method, the maximum modeling error decreases by 1.85%. The maximum tracking error rate of feed-forward control is 0.38%. The hysteresis of MSMA actuators is reduced. By using the feed-forward controller, high precision control is achieved.
Keywords
Introduction
As a new functional material (1) magnetic shape memory alloy (MSMA) has advantages of capabilities, such as large strain, small volume and light quality (2–3–4–5). It is widely used in the fields of bio-engineering, the defense industry and ultra-precision machining (6). Hysteresis of MSMA actuators influences their tracking precision seriously (7–8–9). Extensive researches have been conducted to eliminate their hysteresis nonlinearity (10–11–12–13–14). Riccardi et al described hysteresis of MSMA actuators by utilizing the modified Prandtl-Ishlinskii (PI) model and modified Krasnosel'skii-Pokrovskii (KP) model (10), and established their inverse models. Some control methods were used such as using inverse PI models to build feed-forward adaptive compensation control and using inverse KP models to design hybrid control (13, 14). Furthermore, to eliminate hysteresis nonlinearity and reduce tracking error, the controller was constructed by solving linear matrix inequalities (15). Experimental results showed maximum tracking error was 5 μm. Sadeghzadeh et al (16) researched the characteristics of MSMA actuators by open-loop control. Gain control and hysteresis compensation phase shifter were used to improve the proportion integration differentiation (PID) feed-back control in the experiment. Results showed that control precision, settling time and overshoot were improved and the control accuracy was 25 nm. Ruderman and Bertram (17) proposed the system-oriented dynamic model for MSMA actuators, and combined the dynamic model of second-order linear actuators with Preisach hysteresis nonlinearity model. The discrete model parameters were identified by using experimental data and effectiveness of this dynamic model was validated. Adaptive inverse hysteresis control method based on observer was implemented to improve the robustness of system (17). The effectiveness of the control method was proved by using experiment. Mao Chiang et al predigested the control rules by using sliding mode controller and fuzzy sliding surfaces. Experimental results showed that this method was more effective and the control precision was 0.25 nm (18, 19).
With the advantages of adaptive learning, associative memory, strong robustness and fault tolerance, radial basis function neural network (RBFNN) has the capacity to identify any nonlinear functions. The hidden layers’ output is used to obtain a set of basic functions. The linear approach is achieved by linear combination of output layers of RBFNN. In this paper, the RBFNN hysteresis model of the MSMA actuators is proposed. First, RBFNN is used as activation function to establish an inverse model. Then, a feed-forward controller is proposed by using the theory of inverse an RBFNN hysteresis model. In this work, the more precise model is established and effectiveness of the feed-forward control based on inverse RBFNN model is demonstrated by the simulation results.
Modeling and control of hysteresis nonlinearity based on the RBFNN
RBFNN model
The RBFNN is used to establish the functional relationship model (20–21–22). But the input-output of MSMA actuators is multi-mapping (23). To solve this problem, hysteresis nonlinearity in two dimensions is transformed into one-to-one mapping linear relationship in three dimensions. There are two neurons in the input layer of RBFNN. One is the current value and another is the previous value of actuators. There is one neuron in the output layer. The multi-input multi-output relationship can be transformed into one-to-one mapping (24). The structure diagram of RBFNN is shown in Figure 1.
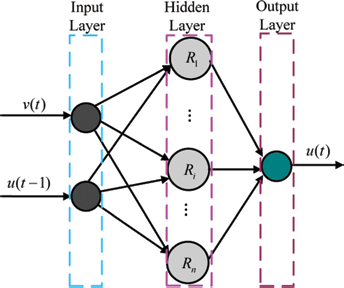
Structure diagram of radial basis function neural network (RBFNN).
As shown in Figure 1 there are two neurons in input layer. Where v(t) is input value of actuators at time t, u(t) is output value of actuators at time t, u(t-1) is output value of actuators at time t-1. The radial basis function is used as transfer function and the weight between input and hidden layer is 1. It has radial symmetry for the center-point in n-dimensional space. In this paper, Gaussian function Rt is function in hidden layer which transforms hysteresis nonlinearity of MSMA actuators to linear relationship.

where ht represents the independent variable of the activation function. In the RBFNN, ht is normally Euclidean norm, which represents the separation from input vector to weight vector. The two-dimensional Gaussian function can be expressed as:

where p is the number of input samples; xp-c represents the Euclidean norm of independent variable in two-dimensional Gaussian function; c represents the center for nodes in hidden layer; s represents the variance for Gaussian function. The output of RBFNN is:

where y is the output for output layer; n represents the number of hidden layer nodes, which automatically increases with different design requirements; wi represents the weight from hidden layer's ith neuron to output neuron. The basic idea of RBFNN is used in this paper (22): input singles are transferred to hidden layer by using the two neurons. The RBFNN is nonlinear transformation, which is an activation function between input layer and hidden layer. The sum of output in hidden layer is linear weighted as input value for output layer, where the weight is adjustable. There are three parameters need to be solved in RBFNN: the weight w from hidden layer to output layer, the center c of basis function and the variance s. Besides, the RBFNN model is established by using Neural Network Toolbox in Matlab to increase hidden layer nodes to achieve high precision of neural network structure.
Inverse model
MSMA inverse model is established by using RBFNN structure. The structure diagram for inverse hysteresis model is the same as Figure 1. While the inputs of input layer are the input v(t-1) of MSMA actuators at time t-1 and the output u(t) of MSMA actuators at time t. The output of output layer is the input v(t) of MSMA actuators at time t. By training experiment data, the availability of the inverse model is proved (25).
Feed-forward controller design
In contrast with feedback control, the method of feed-forward control can adjust the disturbance before the actual output departing from the desired output. Feed-forward control has the predictive compensation capacity with the behavior of disturbance. Satisfied with requirements such as high precision of model, measurable disturbance and high precision of device, feed-forward controller can be established (26, 27).
A feed-forward control system is established based on inverse RBFNN model. Schematic diagram is shown as Figure 2. Feed-forward controller can be designed to eliminate hysteresis nonlinearity for MSMA actuators.

Inverse model feed-forward control scheme.
Simulations
Model simulation
The RBFNN hysteresis model can be proposed by using self-including neurons method in this paper. Modeling precision of MSMA can be improved with enough sample data. The curves of actual input and actual output are shown in Figure 3 which is used to establish the MSMA actuators model.
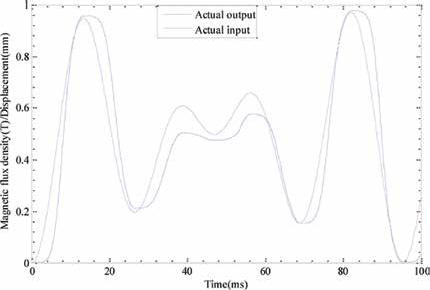
Actual input and actual output of the magnetic shape memory alloy (MSMA) actuators.
Both modeling speed and precision are improved by adjusting scatter coefficient sc and target accuracy coefficient eg. When scatter coefficient is 1, input ranges are covered and the control precision cannot be influenced. Figure 4 shows contrast diagrams of RBFNN model with different parameters.
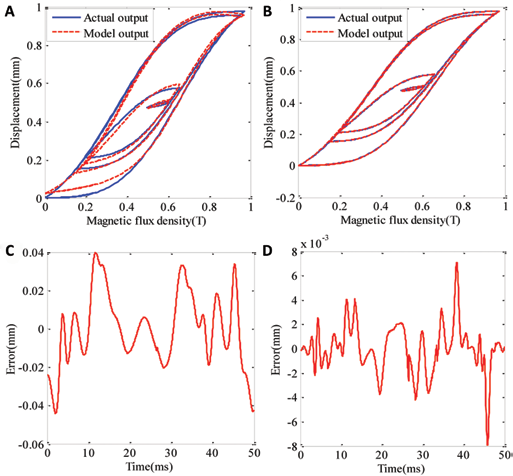
Contrast diagrams of the radial basis function neural network (RBFNN) model with different parameters. (
In Figure 4 (A) and (C) the structure of neural network is simple and running speed is fast at eg = 0.02. The maximum modeling error is 0.04 mm and the maximum modeling error rate is 4.42%. So that the neural network model is not consistent with MSMA actuators at eg = 0.02. While at eg = 4.1 × 10−6, neurons of hidden layer will be increased to 25. In Figure 4 (B) and (D) running speed is ensured and maximum modeling error based on RBFNN is decreased to 0.007 mm and maximum error rate is 0.79%. The effectiveness of hysteresis model based on the RBFNN is proved.
Inverse model simulation
In order to prove effectiveness of inverse RBFNN model for MSAM actuators, it is compared with the simulation of inverse KP model. Simulation results are as shown Figure 5.
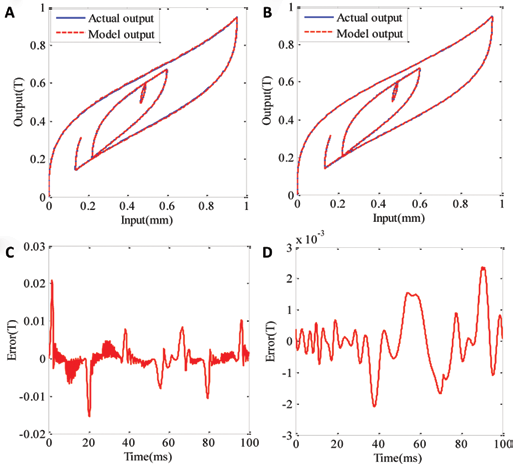
Contrast diagrams of inverse model based on different methods. (
In Figure 5 the inverse model based on RBFNN has better effectiveness in comparison with the inverse KP model in Zhou et al (11). In Figure 5 (B) and (D) maximum error rate for inverse model based on RBFNN is 0.24%. Compared with the inverse KP model established by traditional cut-and-try method (11), the maximum error has reduced 0.017T. The inverse RBFNN model has higher modeling precision of MSMA actuators.
Feed-forward control simulation
An inverse hysteresis model with high accuracy is established by using RBFNN, which is used to build the feed-forward controller as shown in Figure 2. Compared with the simulation of PID feedback hybrid control (11), the effectiveness for feed-forward control method can be proved. The simulation results are shown in Figure 6.
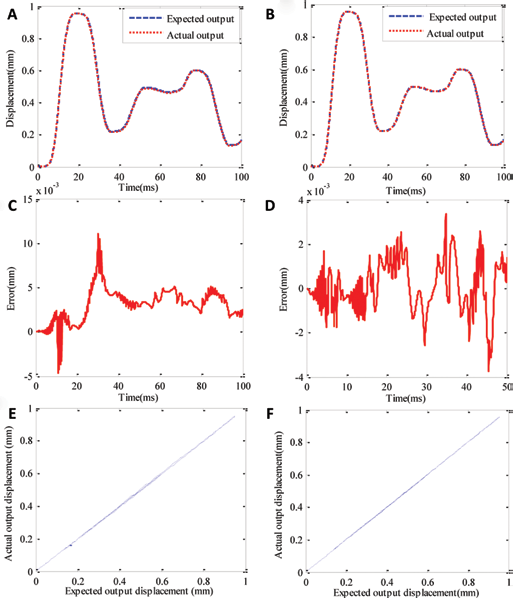
Contrast diagrams of results of feed-forward control based on different inverse models. (
As shown in Figure 6 compared with the feed-forward control based on inverse KP model in (11), feed-forward control based on inverse RBFNN model has higher control precision. Figure 6 (B) is the curve between input and output of feed-forward control system. The tracking effect of the system established by inverse RBFNN model is better than method in Zhou et al (11). In Figure 6 (D) the controlling error for feed-forward control system is 0.00334 mm and the maximum error rate is 0.38%. Compared with the method in Zhou et al (11), it has reduced by 0.72%. Figure 6 (F) shows the hysteresis nonlinearity can be transformed to a linear relationship. The simulation results show the feed-forward controller can suppress the hysteresis nonlinearity of the MSMA actuators effectively.
Conclusions
In this paper, RBFNN model is proposed. The output layer of RBFNN has two neurons. The nodes of hidden layer can automatically increase according to the input sample, until the setting precision of objective function is achieved. Contrasting different setting precision of objective function, the learning speed of this neural network is fast and the local minimum problem can be avoided at eg = 4.1 × 10−6. The modeling error of RBFNN is 0.79%, which describes hysteresis nonlinearity of MSMA accurately. Then the inverse RBFNN model is established as feed-forward controller and compared with the inverse model established by traditional cut-and-try method. The simulation results show the maximum modeling error of inverse model designed by cut-and-try method is 2.09%, while the maximum modeling error rate of inverse RBFNN model is 0.24%. Compared with traditional cut-and-try method in Zhou et al (11), the precision of inverse hysteresis model based on RBFNN is higher, modeling speed is faster, and the maximum modeling error rate decreases by 1.85%. Finally, in order to eliminate hysteresis nonlinearity of MSMA, a feed-forward controller based on inverse RBFNN model is established to achieve open-loop control. Compared with the control method in Zhou et al (11), the feed-forward controller has higher precision based on the RBFNN model. Simulation results show that it is approximately linear between input and output of the control system, and hysteresis nonlinearity of MSMA actuators is eliminated. The maximum controlling error is 0.38%. The proposed feed-forward controller can achieve high-precision tracking control of the MSMA actuators.
Footnotes
Financial support: This study is supported by National Natural Science Foundation of China (No: 51675228), Program of Science and Technology Development Plan of Jilin province of China (No: 20140101062JC), and Program of Twelfth Five-Year Science and Technology Research Plan of Education Department of Jilin province of China (No: 2014B023).
Conflict of interest: The authors declare that they have no conflicts of interest.