
Abstract
Introduction
This work presents the mechanical design of an artificial hand in order to address the need for a commercially feasible prosthetic hand.
Methods
The hand has 3 compliant fingers and a thumb attached to a reconfigurable palm. The fingers and palm are a novel design, which is based on the natural arches of the hand. The design is modular, minimizing the number of parts and reducing assembly time.
Results
This hand and the expandable socket are designed for transradial amputees. It has 9 degrees of freedom (DOFs), 2 of them for the reconfigurable palm. The kinematics and adequate excursion for the fingers and palm are illustrated by finite element method (FEM).
Conclusions
The study implements the mechanical parts by using rapid prototyping to assess preliminary results.
Introduction
Dexterous artificial hand design and manipulation are an active research topic. A very interesting practical application is the field of upper limb prosthetics. A number of laboratory prototypes and commercial versions of the upper limb prosthesis have been made available (1). Many multifingered robot hands (e.g., the Stanford-JPL hand, the Utah/MIT hand, the JPL 4-fingered hand and the Anthrobot hand) have been developed.
However, because the number of fingers and the number of joints in the fingers are insufficient, these hands present a problem in that their movement is unlike that of the human hand (1, 2). Also, the palm capabilities do not simulate its natural role. The palm in most previous studies either works as the housing of the actuator or as the attachment for the fingers (1–3).
In natural fingers, the tendon excursion reaches to 80 mm for full flexing of the finger (3). In a previous design presented by the authors, called the Khefa hand, the study found that the adequate excursion for achieving daily activity life (DAL) reaches 20 mm (2). The actuator required to achieve this range of excursion consumed a lot of power and heated up the prosthetic hand that would be actuated. This problem affected the volume of battery and total hand weight.
Artificial hands that would be actuated by shape memory alloy (SMA) (2, 3) are cumbersome due to this problem: heat is generated by the response of the actuator and the closing speed of the fingers. SMAs are metallic materials that have the ability to return to a previously determined shape when heated to or above their transition temperature. This occurs because the heat causes the material to pass from the weak martensite phase to the more rigid austenite phase, which is known as the shape memory effect (2).
All previous SMA-actuated hands, including our Khefa hand, are categorized and work as voluntary closing hand prostheses. In general, upper limb prostheses can be divided into 2 categories: voluntary opening (VO) or voluntary closing (VC) (4). VO is closed in the resting position and the user can open the device when required; VC is open in the rest position and the user actively closes it when a grasping movement is desired (4, 5).
VO devices have improved over the last 2 decades. Nine devices (4 hooks and 5 hands) have been quantitatively tested: Hosmer model 5XA hook, Hosmer Sierra Load VO hook, RSL Steeper Carbon Gripper, Otto Bock model 10A60 hook, Becker Imperial hand, Hosmer Sierra VO hand, Hosmer Soft VO hand, RSL Steeper VO hand, and Otto Bock VO hand (4).
This study presents the construction design of a VO artificial multifingered hand. This design overcomes the main limitations that were stated above: lots of assembled parts, power consumption related to actuator stroke or tendon excursion and modularity.
The hand consists of 3 compliant fingers and 1 opposable thumb. All fingers have 2 degrees of freedom. The degree of freedom (DOF) of a mechanical system is the number of independent parameters that define its configuration or position in space. The fingers are fixed at the palm, which has the capability to move with 2 degrees of freedom. The positive attributes of the compliant and flexure hinges are no need for lubrication, compactness and ease of fabrication. The fingers and thumb in this design are a 1-part module.
In our design, the palm has a unique design to improve hand grasping function and to enable firm handling of differently shaped objects. The palm design follows the kinematic arches from Sangole's study (5). The palm in this design is reconfigurable and has the capacity to move. The mechanical structure of the hand design enables a stable grasp of objects with different sizes and shapes, without augmenting the mechanical complexity.
We used the finite element method (FEM) to illustrate the finger and palm movements. In addition, the study explored a socket design that overcomes the problems of amputees, such as humidity and heat or sweat, and makes it suitable to fit different amputee sizes (4).
The socket and the palm are a single, integrated part. The study implemented the structure design by rapid prototyping. Its weight is very light and the prototype illustrates the incremental of the circumradial expansion of the implemented socket.
Methods
Description of the Design
This multifingered artificial hand design hand has 9 degrees of freedom, 3 identical fingers, and 1 thumb. Higher modularity, a reduction in the number of parts, and an anthropomorphic shape were considered during the design. Figure 1 shows the complete mechanical structure of the artificial hand, which was categorized as a voluntary opening prosthetic hand. This section describes the design of the finger module and describes their kinematics. The arrangement of the fingers with the specific arches of the palm to aid grasping of different shapes is also demonstrated in this section. The palm and socket module design is illustrated, showing their abilities to move.
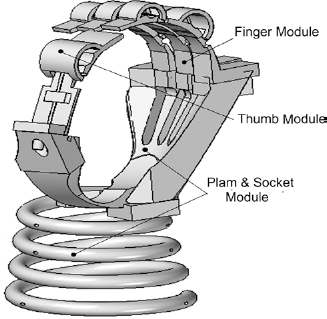
The construction of the designed hand.
The socket of this hand was designed to be worn by transradial amputees. First, the mechanical structure prototype of the designed hand was fabricated using the rapid prototype technique. The study purposes the actuator.
Figure 1 shows the construction design of the prosthetic hand and the limited number of mechanical parts. The mechanism of the finger and the palm design depend on the compliant mechanism and circular flexure hinges.
Finger and thumb design
In the natural hand, there are 5 fingers (index, middle, ring, pinky and thumb). All the fingers have a similar structure except the thumb. Each finger has 3 different phalangeals: proximal, middle and distal, but the thumb has 2 phalangeals (6).
Finger design is crucial in prosthetic hand design. All degrees of freedom concentrated in the fingers are what give the hand its capabilities (7). The finger is an articulated structure and has a series of mechanisms. It consists of rigid links and joints and a transmission wire. It consisted of many components in our previous study (2).
All finger parts and their functions will be gathered into 1 part, which has an integral 1-piece design (hinges, phalanges, and tendons made of the same material). The hand designed in this study has 3 identical fingers that are similar to the natural index finger in length and width. They have 2 flexure hinges that simulate the distal and middle interphalangeal joints. Each finger has two DOFs.
The thumb in the designed hand has 1 flexure hinge and 1 DOF. It is placed in an opposable direction to the fingers. The width of the thumb is larger than natural to increase the contact area between the fingers and the object being held.
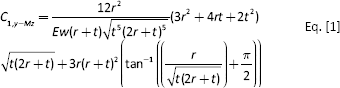
Figure 2 illustrates the design of the finger and thumb. The main portions of the design are A, B, C, and D. Portion A represents nonsymmetrical circular flexure hinges. Its compliance or capacity of rotation around a z-axis that was induced by moment in the z direction C1,θz-Mz will be determined by the following equations.

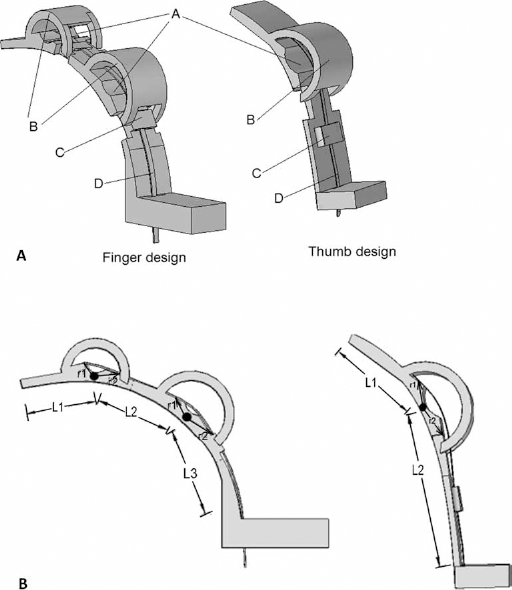
The main portions and geometrical parameters of the designed finger and thumb. (
where r, t, w, E represent radius, thickness, width and elastic modulus of the designed material respectively.
The portion B increases the lateral stiffness of the compliant hinges in the finger and thumb. Through the finger opening, the curved part in the zone will be inserted into the slot to prevent undesirable motion except flexion or extension around the z-axis.
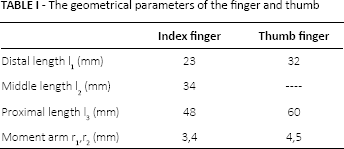
The portion C as shown in Figure 2A illustrates the guide for the transmission wire D. Portion C plays the role of the sheath in the natural finger that guides the tendons. Figure 2B illustrates the main geometrical parameters of the finger. The lengths of the finger's Digits L1, L2 and L3 and the moment arms r1, r2 are determined in Table I.
The geometrical parameters of the finger and thumb
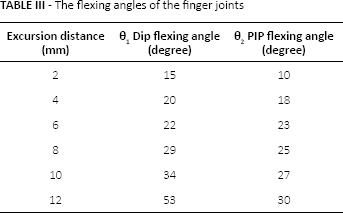
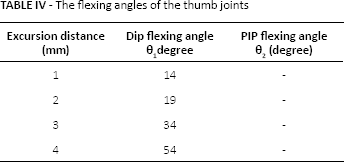
The kinematics of the finger and the variation of the interphalangeal angles at different excursion distances is defined by using analysis. FEMs illustrate the finger and the thumb movements. Figure 3A shows the finger movement and the DIP and PIP angels at different positions. Figure 3B depicts the thumb kinematics and its interphalangeal angles.

Simulation of the finger and thumb through flexing. (
The resultant joint torque at each joint will be produced through flexure hinge flexing as described in Equation [3]

where i is the joint number, 0 is the flexion angle of the hinge (6). Figure 3 illustrates the range of the flexing angles of the finger and thumb.
The power of the actuator or work for flexing the finger is determined by the following equation

where Ft is wire tension, D is the excursion distance and t is the actuating time. In this hand design, the actuating time represents the time required to open the finger and not the holding time as in the previous VC design.
Palm and Socket Module
The study presents 1 integrated part that represents the palm and socket. This concept of design simplifies the assembly of the hand and reduces the manufacturing cost. The main role of the palm is to aid in grasping capabilities. The palm arches may play an integral role in finger joint movements and the assurance of a stable grasp. Sangole's study determined the 3 main palm arches and their alteration through grasping (5). The previous study by the authors utilized these arches to design the Khefa hand (2), but it incorporated many parts and was time-consuming to assemble.
The palm in this study is distinguished by 2 design considerations. First, the arches of the palm follow Sangole's arches (5) and replicate the Khefa palm arches into 1 integrated part. In addition, there are slots and compliant hinges as shown in Figure 4A to allow the palm arches to expand and increase the grip distance. This attribute gives the palm its capability to move. Arches A, B and C shown in Figure 4A mimic Sangole's transverse, longitudinal and oblique arches, respectively.
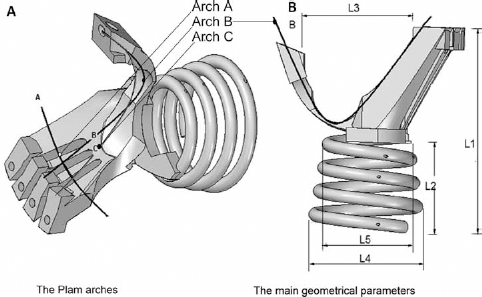
Illustration of the palm and socket design and the main curves. (
Figure 4B and Table II shows the main dimensions of the palm and socket at the initial situation. These dimensions L1, L2, L3, L4, and L5 describe the palm and socket before expansion by utilizing the circular compliant hinges and the characteristics of a spring shape.
The geometrical parameters of the socket and palm
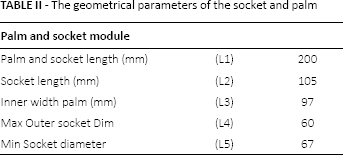
The study used FEM to show the expandability of the 2 main arches that increase the mobility or DOF of the palm. Figure 5 shows the projected views of the designed palm. Arch A expands to arch A'. This mobility of the arch provides the abduction and adduction effects for all fingers.
Simulation of the palm movements.
The second DOF is illustrated in Figure 5 when arch B expands to arch B'. This ability increases the grip distance when grasping larger objects. The radius of the compliant hinges that gives the palm capabilities are 6 mm and 25 mm. At the slot ends that are illustrated in Figure 4, the radius of the circle of compliant hinges is 6 mm. These hinges affect the compliance of arch A. The 25 mm length is the radius of the compliant hinge that affects arch B.
The socket is the important part for an amputee since it is interfaced with the patient's stump. The socket in this study is integrated with the designed prosthetic hand as 1 part in order to reduce assembly time. The design specifies an adjustable socket design that will be adapted to any size patient with a transradial amputee stump. This adjustability decreases the problems associated with the stump prosthetic interface.
The socket design is illustrated in Figure 4. The socket is in a spring shape with pitch distance between its coils and has the open end. These characteristics provide expandability for the socket diameter to adapt to any transradial amputee's stump.
The original dimensions of the socket are shown Table II. The pitch distances and diameter of the coils are 20 mm and 5 mm, respectively.
In addition, the socket design has holes shown in Figure 1 to house and attach to any suitable actuator for this configuration.
Rapid prototyping
The study presents the first prototype of the designed hand without an actuator. The prototype was fabricated using a rapid prototyping (RP) technique. RP is an advanced technique that utilizes automated fabrication of a physical model or prototype from computerized data or a CAD system for visualization, testing and verification. It works by forming the desired shape by adding or removing layers of material (8).
The first prototype of the hand without actuator was implemented incorporating 2 fingers and a thumb. It is made of acrylic material whose tensile strength reaches to 35 Mpa. The study used an InVision Si2 3D-printer that utilized multi-jet modeling (MJM). The study will use the shape memory alloy actuator from our previous study (2).
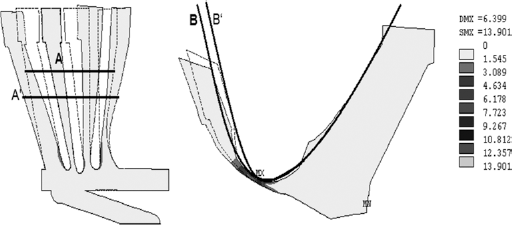
The dimensions of the fabricated prototype resemble the human hand size. Figure 6 shows the structure of the implemented hand.
The implemend parts of the designed hand.
Results
Table III and Table IV show the required tendon excursion for each finger and the designed grasp distance. The weight of the fabricated finger was 20 g and the weight of the palm-socket was approximately 150 g. The cost of the implemented parts of the design by using rapid prototype did not exceed US$80.
The flexing angles of the finger joints
The flexing angles of the thumb joints
The capability of the socket inner diameter to expand is 10 mm. This value was measured directly from the implemented hand as shown in Figure 6.
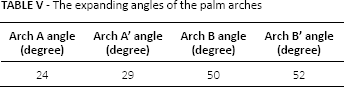
FEM was used to determine the expansion values of the palm arches as shown in Table V. The arch A as shown in Figure 6 expands from 25° to 29°. The expansion of arch B will be up to approximately 2°.
The expanding angles of the palm arches
Discussion
The hand is lightweight compared to our previous Khefa design (2, 9). This hand consists of 3 fingers and a thumb. Each finger consists of 2 links replicating the distal and middle phalanges. The study decreases the number of movable digits or phalangeals (2 for each finger instead of 3 digits) to enhance finger controllability and decrease the transmission wire excursion. The fingers had only flexion and extension abilities.
The design utilized the flexure hinge and compliant mechanism to achieve the design goals and obtain a hand with higher robustness and modularity. This design used a philosophy similar to Ralph's hand (10) but with differences in the construction and palm design.
The modularity of this design allowed the artificial hand to be assembled and disassembled with relative ease. The finger is compiled with 1 part and 1 transmission cable. This finger design has higher modularity and a lower cost than fabricated hands in (11–13).
The transmission wires pass through the finger as shown in Figure 1. Each joint was designed using a novel flexible mechanism based on the stiffness of the flexure hinge related to its dimensions (thickness, width and height).
The opening span is less than the range of previous common hands such as the Otto Bock model 10A60 hook (4) or the Khefa hand (2). This problem was overcome by moving the palm and increasing the grip span and facilitating finger abduction and adduction.
The maximum cable excursion of the designed hand is less than previous VO prosthetic hands such as Hosmer Sierra 2 Load VO hook, Hosmer model 5XA hook and Otto Bock VO hand (4). Furthermore, it is less than our previous design, which was actuated by shape memory alloy.
The distinguishing design of the palm has 2 DOFs. They are achieved in the arch A and arch B expanding capabilities. The expanding of arch A as showed in Figure 5 plays a role in abduction and adduction for the fingers. Another arch B and its expandability widens the span of the hand when it holds bigger objects. Thanks to the socket design, this hand is designed to be suitable for wearing with different sizes of transradial amputees.
Conclusions
This paper presents the design of a multifingered artificial hand without an actuator. It is categorized as a voluntary opening prosthetic hand. The structure of this hand was low cost and lightweight with higher modularity and ease of assembly. The study covered the design of the main parts and modules of this hand, its main attributes, and finger and palm kinematics. In addition, the study suggests the design of an expandable socket to wear with different transradial amputee sizes.
Future work
The authors will be using different types of actuators with this design. They plan to assess the performance of the implemented hand through picking up and grasping differently sized objects. In addition, we will determine the main commercial specifications of this hand and collect data from amputees who will use or wear it.
Footnotes
Financial support: None.
Conflict of interest: None.