Abstract
BACKGROUND:
Balance training on unstable surfaces is widely used in medicine and sports. The main disadvantage of balance platforms is weakly definable assessment of the level of instability (IL) they create.
OBJECTIVE:
To evaluate the mechanical characteristics of a suspended single-plane instability balance platform which determines quantitative instability characteristics.
METHODS:
Three criteria influencing the IL were evaluated: 1. The displacement of the platform board by changing the position of the object on the board; 2. Amount of force required for board displacement; 3. The vibration damping of the platform.
RESULTS:
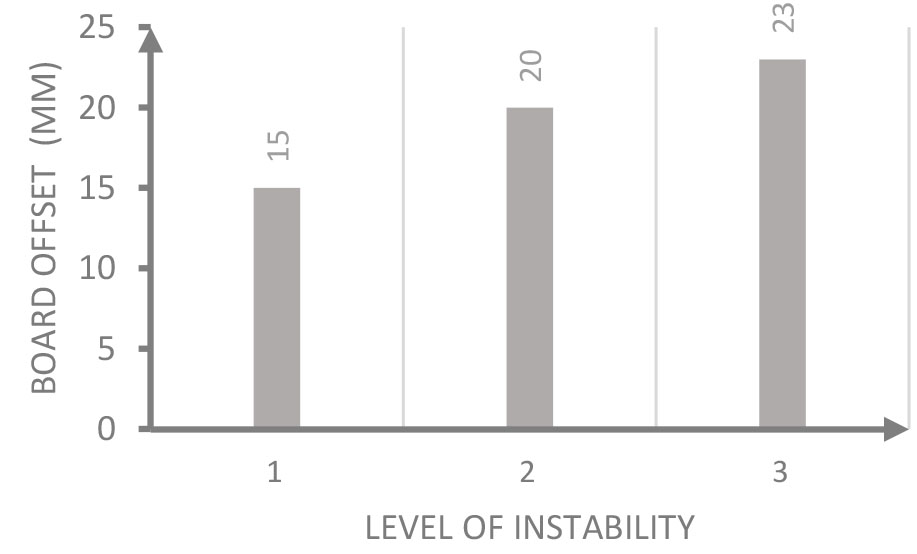
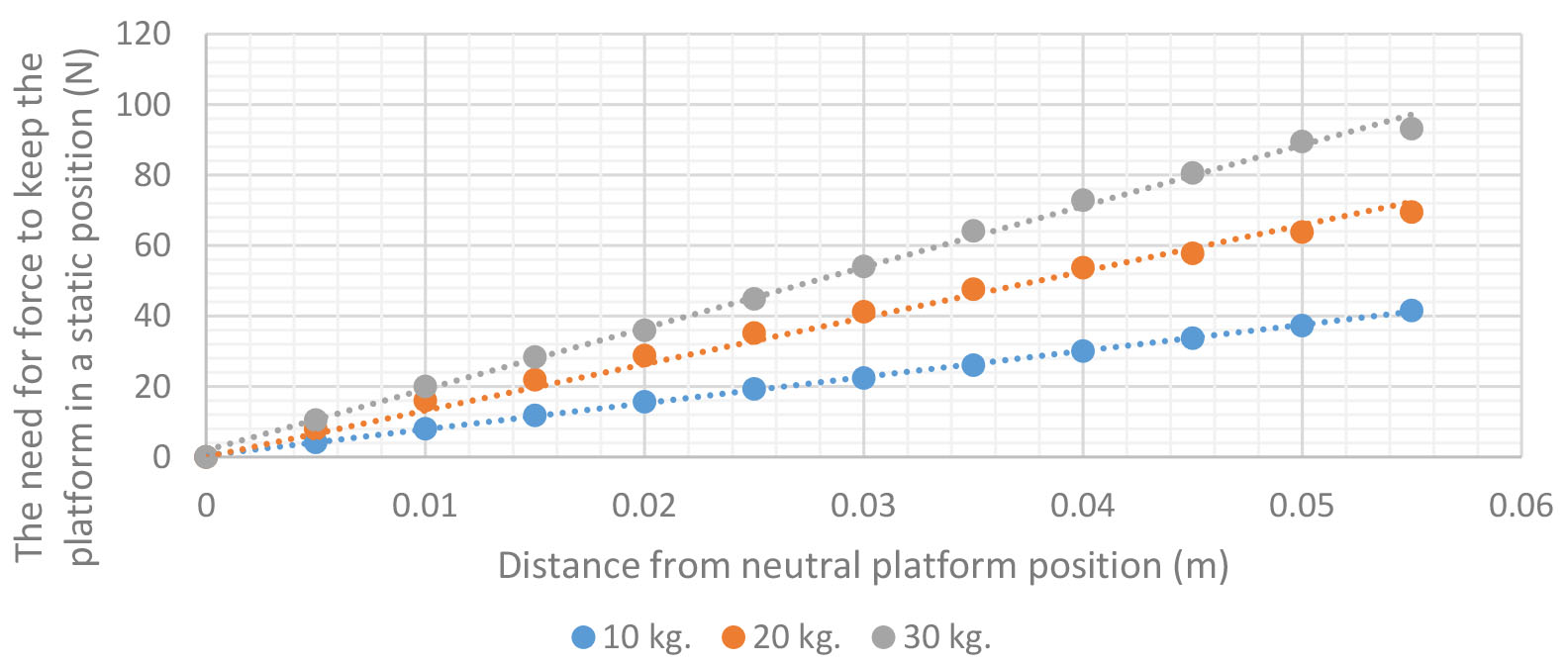
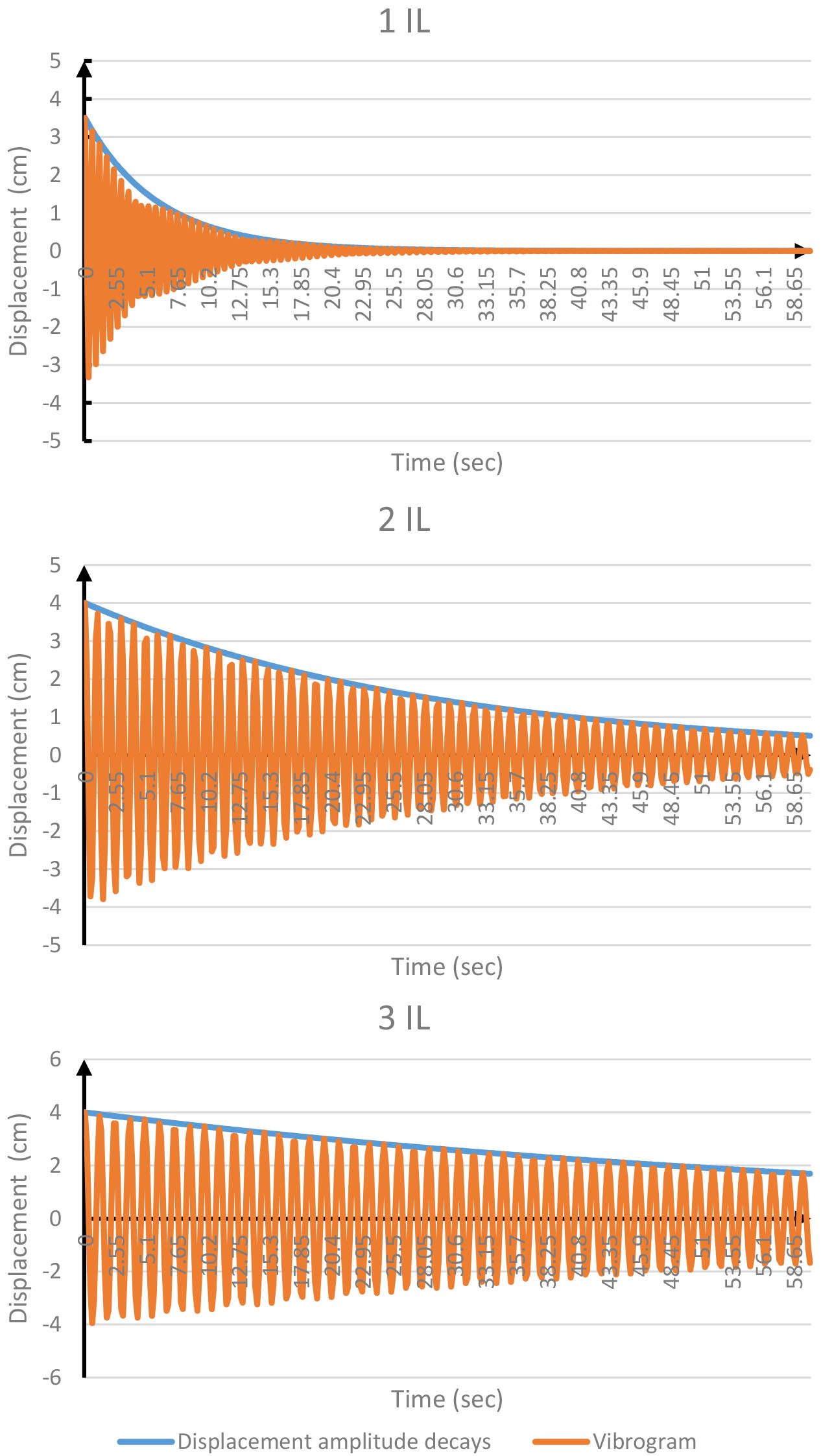
1. 1IL the displacement of the object on the board affected 0.66 cm. the displacement of the board relative to the platform frame; 2IL – 0.79 cm; 3IL – 0.91 cm.; 2. A force of 2.64 is required for a board displacement of 1IL compared to 2IL and 5.76 times that of 3IL. 3. Damping factor 1IL – 0.015, 2IL – 0.006, 3IL – 0.003.
CONCLUSIONS:
1. The longer the suspension, the change in the position of the object on the board affects the greater movement of the board relative to the platform. 2. Different IL can be compared with each other depending on how different the force required to cause the board to move. 3. The platform dampens vibrations weakly, but the damping between 1 and 3 IL differs about 5 times.
Introduction
Principles of maintaining postural control
Human postural control is a feature of the body dedicated to maintaining the center of mass (COM) lines of gravity within the base of support (BOS) with minimal sway. Postural control can be classified in different ways. It is usually divided into static and dynamic. Static stability is when the balance is not disturbed by external forces, e.g. quiet, standing. Dynamic stability is defined as maintaining or restoring balance in response to internal or external disturbances [1]. Assessing postural stability from a neuromechanical perspective, equilibrium is an ongoing process in which the COM of the body is actively returned to the boundaries of the support area [2]. The human body is largely unstable due to gravity and additional destabilizing forces resulting from body movement and the body’s interactions with an environment [3]. The maintenance of postural control is based on two fundamental processes: 1) feedback, 2) primary control. Postural response of the feedback is used when postural stability is unexpectedly disturbed. An example of this could be slipping on ice. Sensory feedback acting through the nervous system plays an important role in this process.
The process of feedforward postural control is used to restore a predetermined loss of postural stability. This postural response is performed even before potentially destabilizing voluntary movement, and aims to maintain stability during the movement.
Balance in the anterior-posterior (A-P) direction is largely based on the ankle joint strategy, while in the medio-lateral (M-L) direction, movements are controlled by abductive and adductive movements of the hips [4, 5]. The ankle strategy is used to eliminate minor disturbances, usually on a hard surface. To implement this strategy, the muscles of the distal areas of the legs are activated. Fluctuation occurs through the ankle, while the hips and knees are relatively tense. For example, during forward sway, paravertebral, hamstring and gastrocnemius muscles are activated to keep the COM within the support area. Abductor, quadricep, and tibial muscles are deactivated at the same time [6]. The hip strategy can be described as a movement pattern designed to correct an imbalance by creating torsion through the hip joints. When the balance is disturbed by pushing or pulling, the flexion/extension muscles of the thigh are activated together with the flexion/extension muscles of the torso to maintain balance, only in different patterns. This depends on the way in which the balance has been disturbed. Activation of both hip and torso muscles are related to hip strategy and are important for maintaining balance on the frontal axis [6]. If the movement of the COM relative to the body support area exceeds the ability to restore the ratio of COM to Base of Support (BOS) required to maintain postural stability, then a stepping response is activated to ensure postural stability. In order to restore disturbed stability, a mechanism of postural synergy is used, which is continuously active through continuous sensory feedback, thus constantly regulating (adjusting and correcting) postural stability [7].
To date, there is not a sufficiently well-known balance disruption method that can best summarize the mechanism of imbalance most commonly found in everyday life [3]. Standing on an unstable platform constantly disturbs the balance of the body due to the changing position of the support base. Incorrect and irregular COM movement makes it necessary to ensure COM support within the BOS, which requires constant neural integration. The body’s efforts to control platform movement can reduce the effects of anticipated imbalances, thus limiting platform movements. To maintain balance control, the central nervous system is involved more when standing on an unstable platform than when standing still. Sensory information from the visual and vestibular systems is important when standing on an unstable platform. Continuous head movements and mismatches of sensory information entering the brain (from different sensory sources or sensory organs) can make standing even more difficult. Therefore, the role of proprioceptive feedback when standing on an unstable platform is very important.
From a biomechanical perspective, it has not yet been analysed in detail which mechanisms of postural stability are dominant when standing on an unstable platform. Critically assessing, the level of imbalance created by these platforms should be high due to the dynamically changing body mass center and support area [8].
Forms of postural instability
Unstable platforms are most often used for balance training workouts. These workouts are a widely used tool in various medical fields e.g. in rehabilitation or geriatrics. Balance workouts include exercises performed on unstable or moving surfaces. According to the balancing mechanisms, these exercises can be divided into conventional training systems (CTS) and reactive balance training (RBT) (Fig. 1).
A – conventional training system; B – reactive balance training.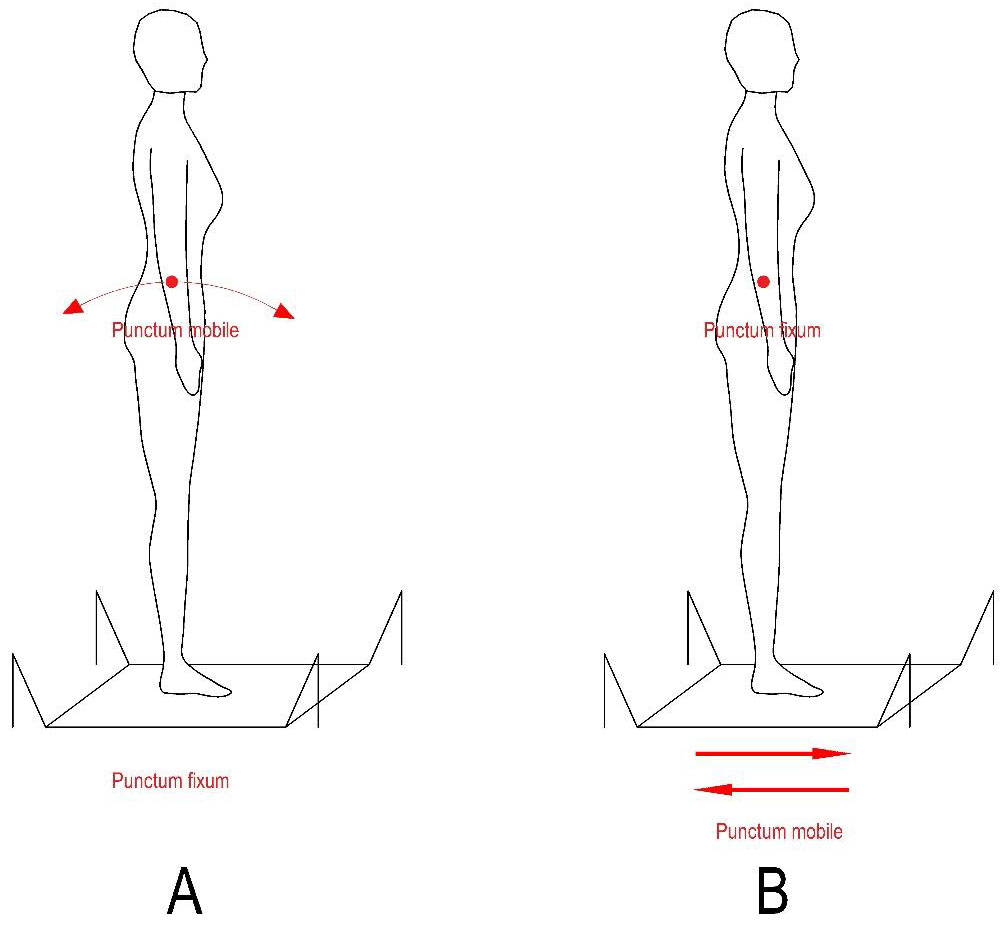
They differ in that those different approaches are used to disrupt stability, as well as activating different strategies to balance. In the case of RBT, the balance is disturbed both by changing gravity vectors (resulting from the movement of the center of mass of the body) and by the displacement of the body support relative to the center of mass of the body. In the case of CTS, it can be described using an inverted pendulum model. During it, the body’s center of mass moves at a stable BOS position. In order to maintain the vertical position of the body, the gravity vector of the latter is controlled using torques caused by the ankle joint. According to current data, RBT training is suitable for training in anticipatory balance control [9].
According to the mechanical constructions, 2 most common commercially available categories of unstable platforms can be distinguished: 1. Suspended single-plane instability balance platform (SIPIBP); 2. Supporting instability balance platform. In this work, we will focus on SIPIBP. Posturomed, Abilli, Shuttle Balance Senior platforms can be included in this category. The general principle of operation of these platforms is based on the creation of an unstable base by hanging it freely. The principles of hanging are different.
Posturomed© platform is 60 cm
Shuttle Balance Senior© platform. The platform board is hung to the frame using non-depreciating chains. By adjusting the length of the chains, the height of the platform board and the tilt angle are changed. The stability of the platform is adjusted by selecting the chain anchorages on the board: the closer the chain anchorages are to the center of the board, the higher the level of instability (LI). The device also uses elastic dampeners to adjust lateral resistance, and control cords to adjust range of motion.
Definition of IL by chain lengths and clamp heights
Definition of IL by chain lengths and clamp heights
The advantage of the support platforms used is that they have defined LI measurements for the support area tilt angles used, such as Biodex Balance© or NeuroCom EquiTest System©. However, these platforms are mainly adapted for conventional training and balance assessment, where the ability to maintain a center of gravity at the axial center of equilibrium is provided by the platform, which coincides with the support area. This means that this method of balancing relies mainly on ankle joint movements, while other balancing strategies are not sufficiently activated. With the popularity of reactive balance training, SIPIBP is becoming increasingly relevant. The main disadvantage of these platforms, which are still in use, is that they do not have a developed LI assessment. For example, stabilization time is used for the quantitative dynamic stability assessment of Posturomed©, but measured time in the presence of differently tightened elastic elements can vary drastically, even for the same subject. Unable to quantify the LI, the following problems are encountered:
In the absence of a measured LI value, it is difficult to assess the postural stabilities of different groups of people. In the absence of a unified LI measurement, it is difficult to assess the effectiveness of the applied training and the rehabilitation process. According to the known LI quantitative definitions and measured values of human postural stability, the most appropriate and safest training programs could be selected.
The aim of this work is to evaluate the mechanical characteristics of SIPIBP that are important for quantitative instability characteristics.
Platform construction
An Abili Balance© (Kaunas, Lithuania) device was used for the study. It consists of a frame, columns attached to it, and a board (size 0.6
Suspended single-plane instability balance platform construction.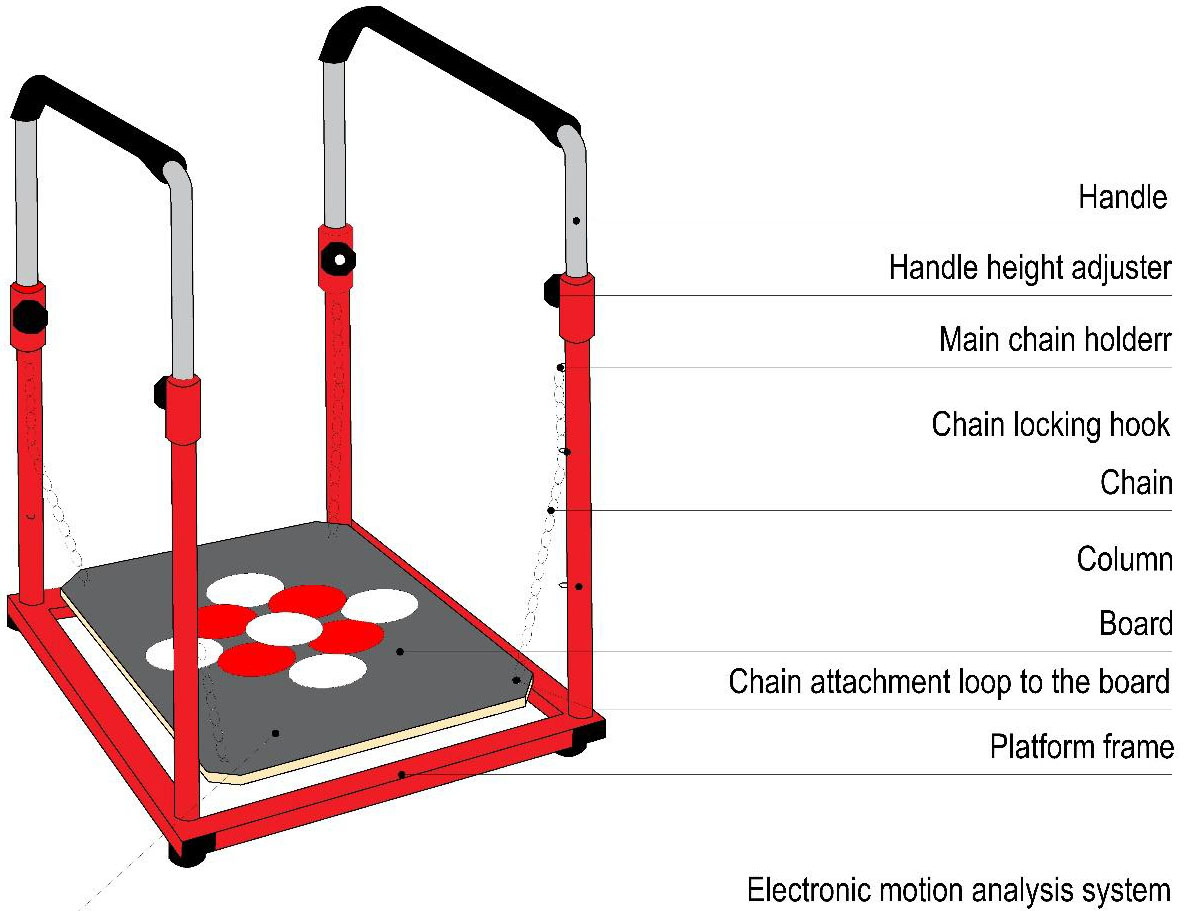
Spatial schematic representation of the board hanging.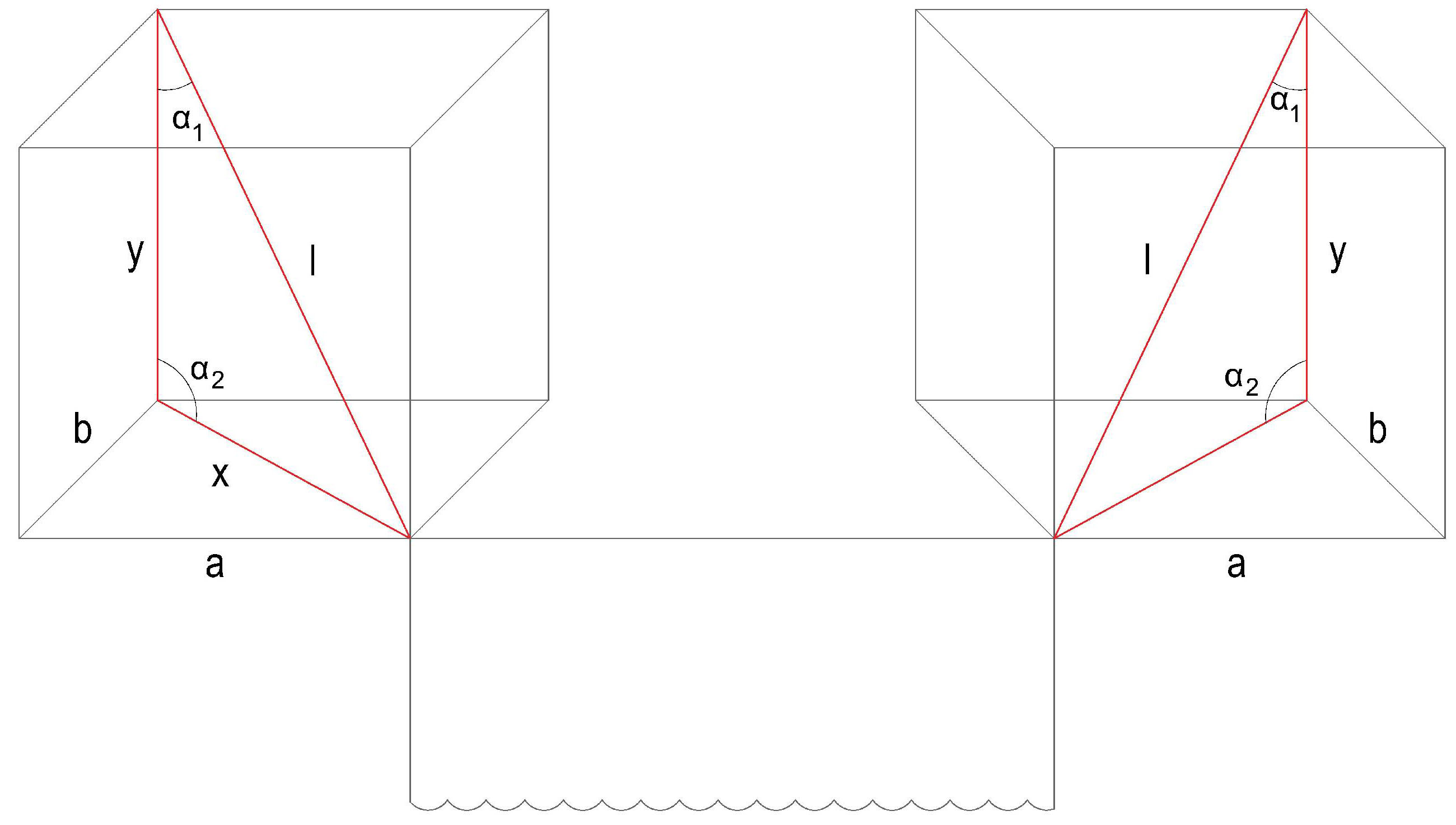
The board held by the platform frame can move in 3 main directions: anterior-posterior, medio-lateral, and oblique (Fig. 4). As the board moves, the size of the angles between the column and the chains changes. The change in these angles depend on the direction in which the board is moving. If the board approaches the platform frame, then the angle of the column-chain on that side decreases. Therefore, the approaching edge of the board descends below the height of the neutral board position. The opposite situation occurs with the edge of the board moving away from the frame: the angle of the platform frame column-chain from which the board moves increases, so the edge moving away from the frame rises above the height of the neutral board position (Fig. 5). Similarly, the movement takes place as the board moves sideways.
The main directions of movement of the balance platform board.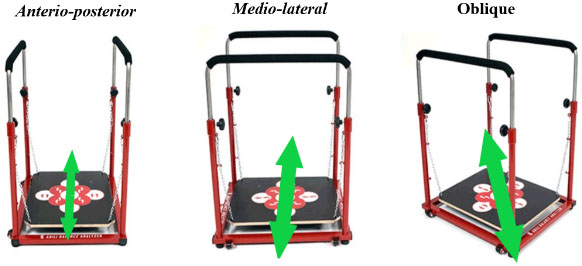
The solid line shows the position of the platform at equilibrium. The dotted line shows the movement of the platform in the A-P directions and the formation of the slope of the plane. Solid line no. 1 shows the height of the board in the neutral position. Dotted line no. 2 shows the height of the board end approaching the frame (below the former neutral position). 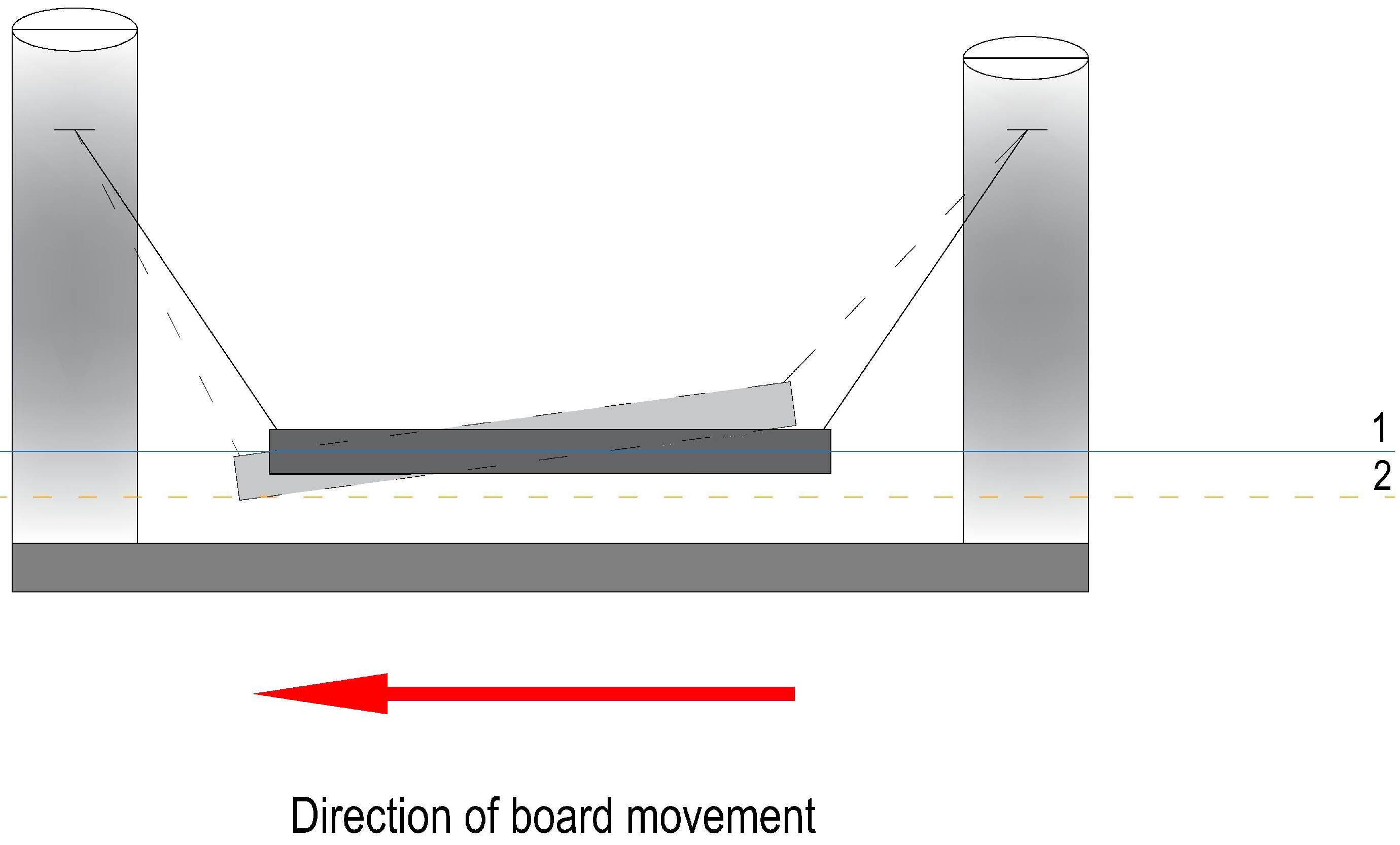
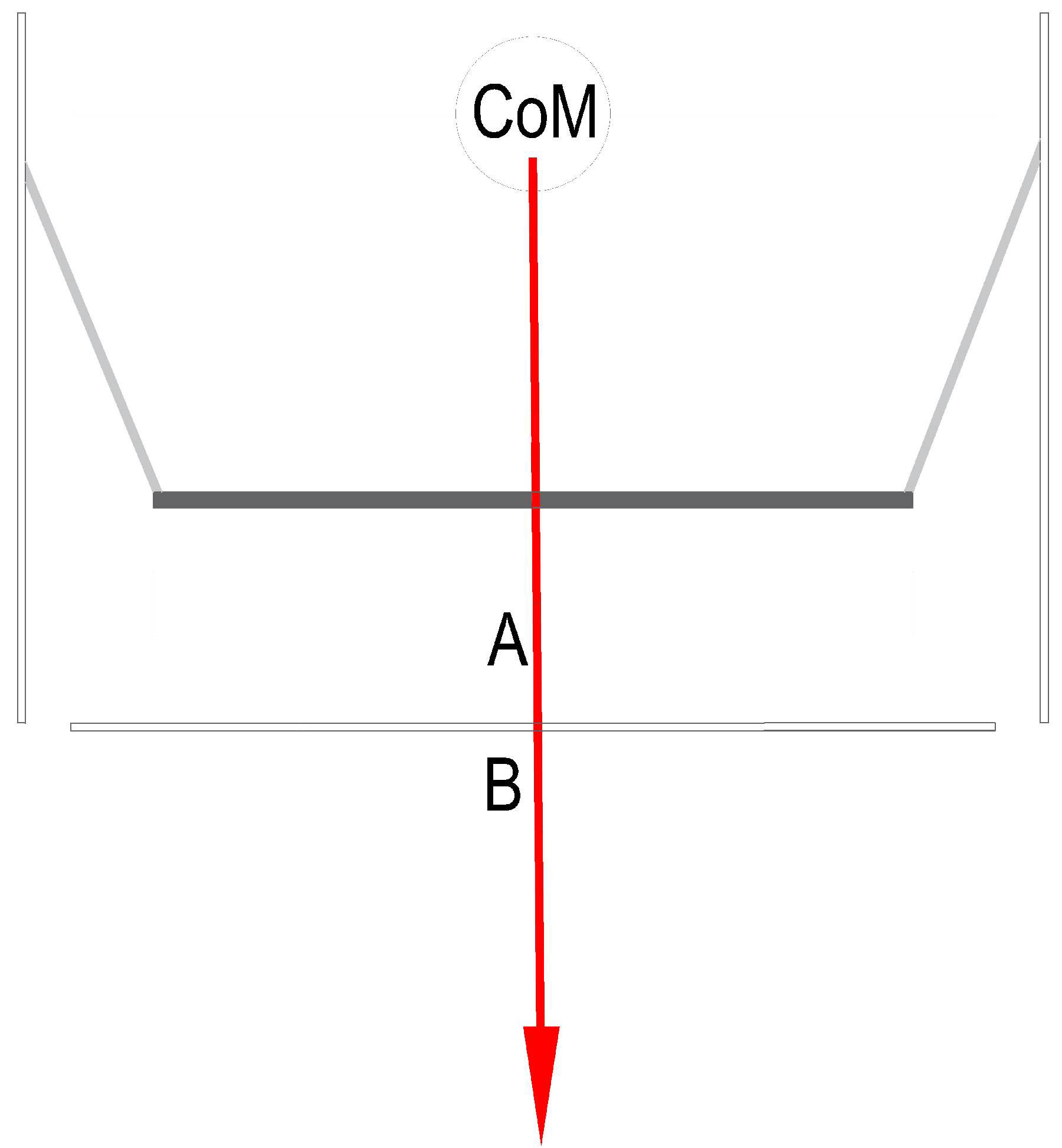
Different SIPIBPs create imbalances in different ways. When standing on the balance platform, the initial neutral position is when the vector of the center of mass of the body is projected into the position of the center of the board (A) and the platform frame (B) (Fig. 6). The displacement of the platform board results from two different principles:
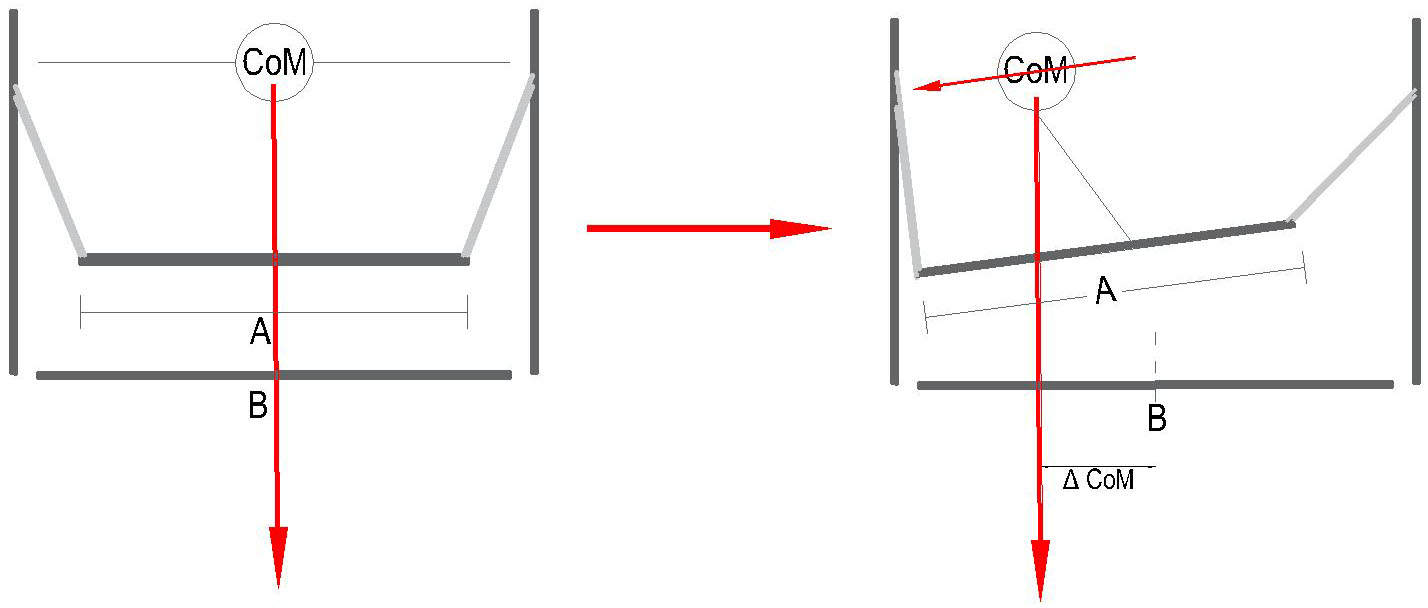
Due to the changing position of the center of body mass. When the position of the center of mass changes in respect to the centers of the platform frame and the board, the force of gravity is redistributed between the supports (suspensions). A higher load falls on this suspension, to which the center of mass is closer. As the holders are flexible, a displacement of the board occurs, coinciding with the direction of movement of the center of mass of the body (Fig. 7).
Neutral position when standing on a balance platform when COM coincides with BOS.
Changes in the center of mass of the body are caused by the movement of the board, when the change in the position of the center of mass affects the displacement of the board and the mismatch between COM and BOS. With a stable position of the center of mass of the body. In this case, the position of the center of gravity with respect to the center of the platform frame is fixed. From a biomechanical perspective, this movement of the board is most dependent on the movements caused by the lower part of the body (Fig. 8).
The movement of the board in a stable position of the center of mass of the body is caused by the movements of the lower extremities.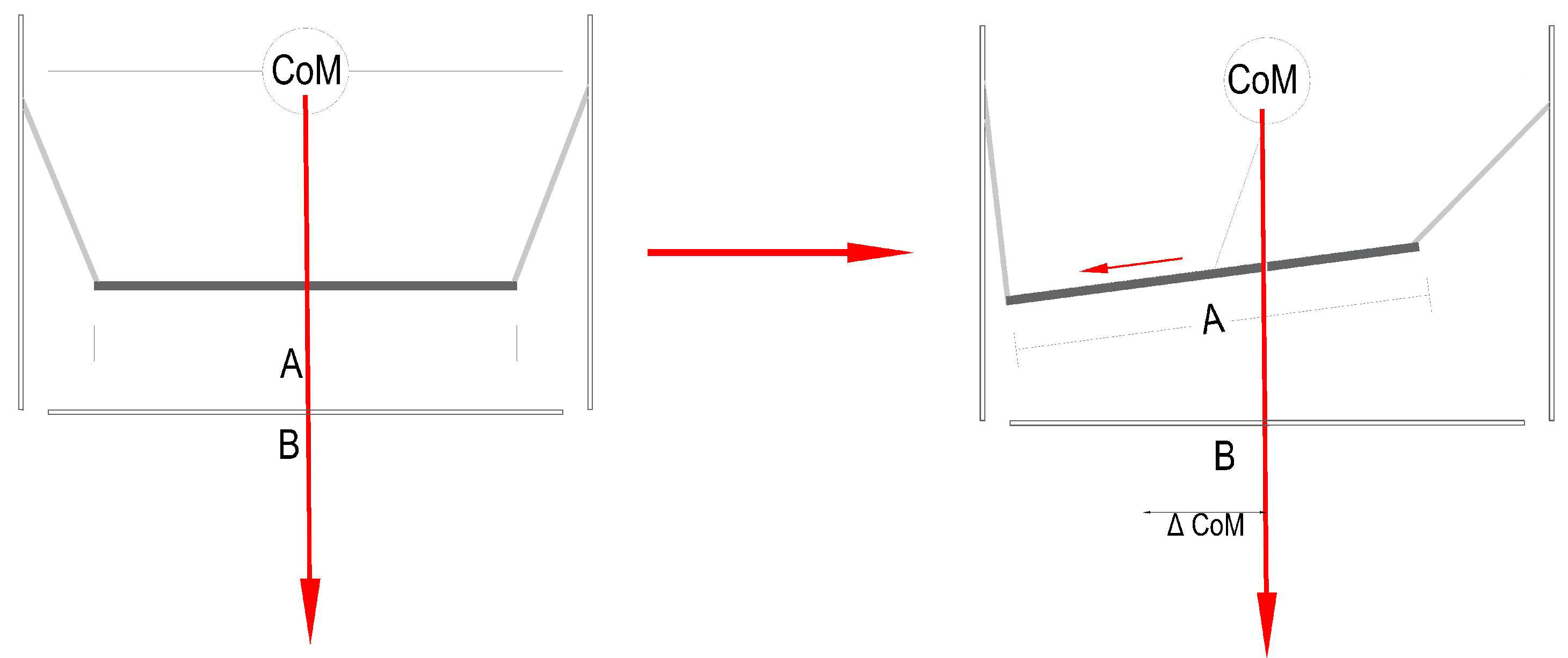
Such a dual-influenced movement of the board – in one case with a stable center of gravity, and in another case due to the movement of the center of gravity itself – creates a mixed mechanism of equilibrium perturbation. In hypothetical circumstances, when a person is standing on a platform, the balance is disturbed in both of these ways, and a dynamic alignment of the center of mass and the support area is required to restore and maintain balance. It is likely that LI quantification requires an integrated approach to platform design, and quantification of each of the equilibrium perturbation mechanisms.
3 types of tests were performed to quantify the LI of the hanging reactive balance platform:
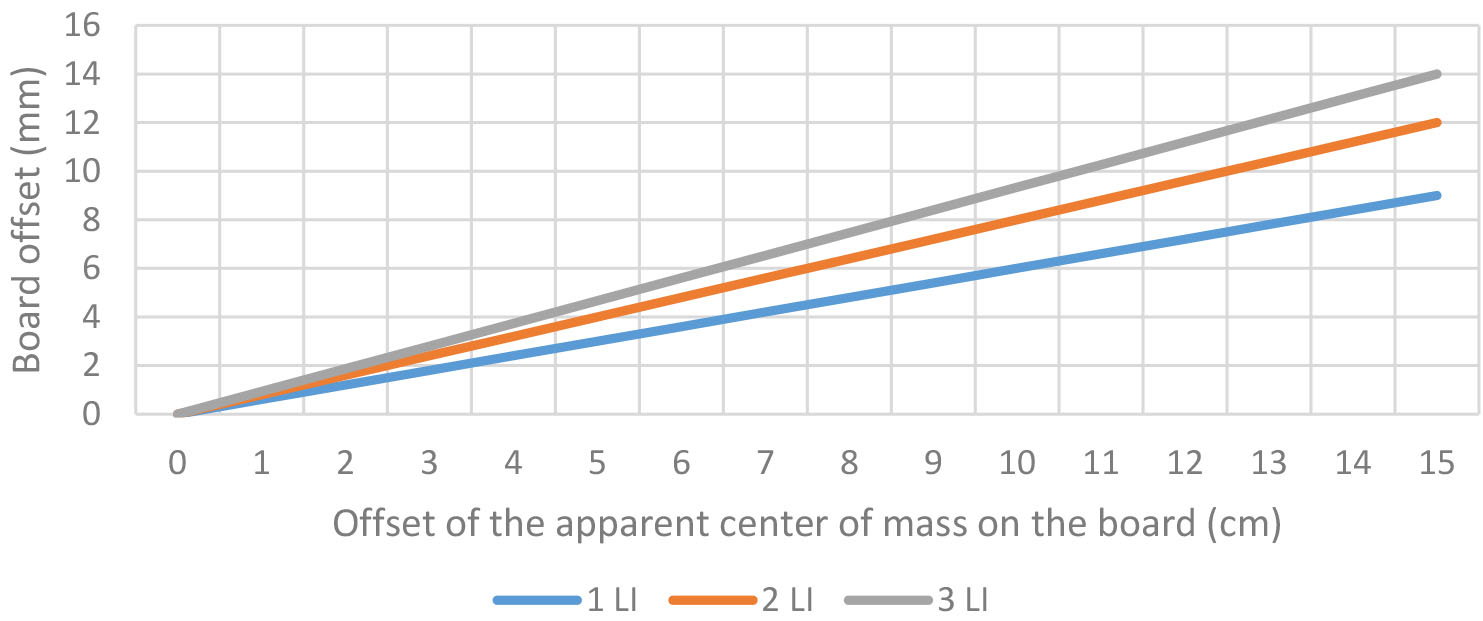
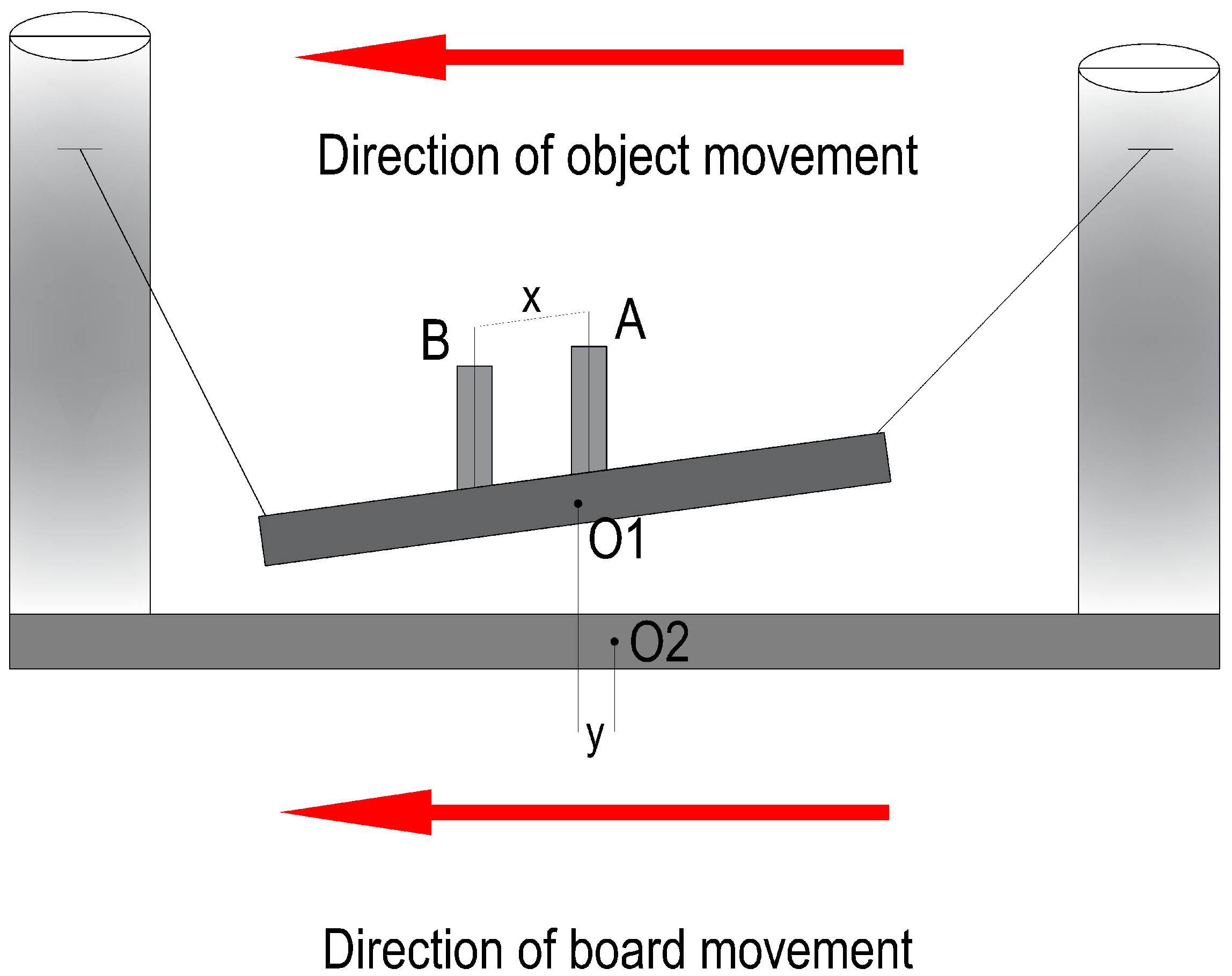
Evaluation of the relationship between the changing position of the center of gravity center and the motion of the balance platform board. Measurement of board displacement caused by change in the position of the center of mass of the body. In order to assess how the body’s center of mass movements influence the displacement of the board, a simplified pattern of the center of mass of the body’s movement was created. During it, two sliding rails were attached to the balance platform board. A weight was placed on the rails in the center of the board. On the rails, this weight was pushed every 1 cm interval from the center to the edge of the board. After each weight displacement, the displacement of the center of the board relative to the platform frame was also measured. Measurements were performed for each LI separately. Measurements in the front-rear (A-P) direction were performed. The positions of the balance platform board and frame were set to a neutral horizontal position before the measurements. The board is loaded using the weights of 20 kg (dimensions 0.24
Test scheme 1. A – the initial weight position is marked; B – weight position, after its displacement on the rails; x – the distance by which the weight was moved (with respect to the center of the board); y is the offset of the center of the board (O1) in relation to the platform frame (O2) after the move of the weight A to the position B at a distance x.
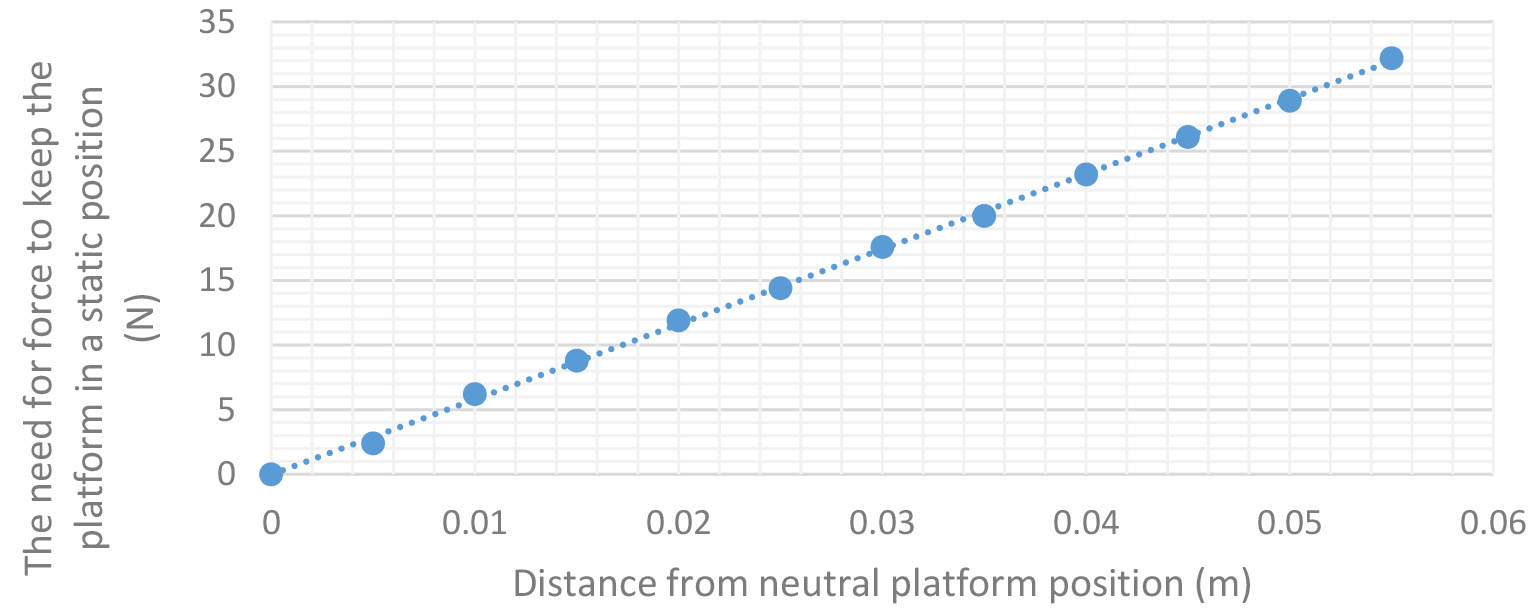
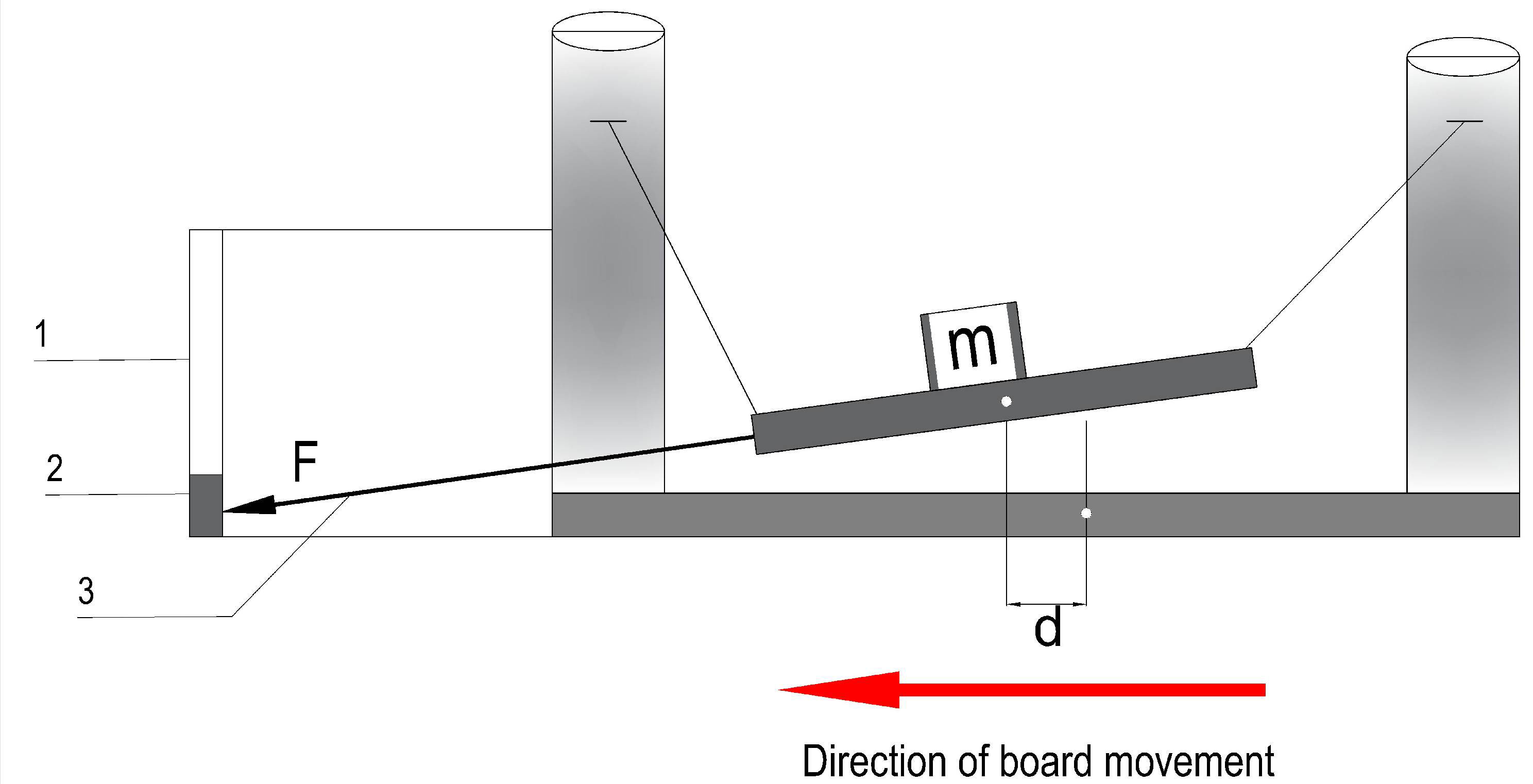
Test scheme 2. 1 – additional frame, 2 – power meter, 3 – inelastic cable. Evaluation of the movement of the balance platform board at a stable position of the center of gravity. The load on the board of the same weight and dimensions as in test 1 was used during the test. The weights are placed in the center of the board. An extra frame was constructed in addition to the platform. A sliding rail with a digital force transducer (RS232, Mecmesin, measuring range 10 N – 2500 N, accuracy range
Parameters affecting LI. In order to evaluate how the platform dampens vibrations, the damping factor was measured. In each of the LI, the board was pulled back from the neutral position and released for oscillation. The conditions for each LI test are given in Table 2. In the case of LI 3 and 2, the distance at which the edge of the board approaches the contour of the platform frame is retracted. In the 1
Experimental conditions, in each of the IL None to report.
Footnotes
Conflict of interest
References