
Abstract
BACKGROUND:
Knowledge of the location of sensor devices is crucial for many medical applications of wireless body area networks, as wearable sensors are designed to monitor vital signs of a patient while the wearer still has the freedom of movement. However, clinicians or patients can misplace the wearable sensors, thereby causing a mismatch between their physical locations and their correct target positions. An error of more than a few centimeters raises the risk of mistreating patients.
OBJECTIVE:
The present study aims to develop a scheme to calculate and detect the position of wearable sensors without beacon nodes.
METHODS:
A new scheme was proposed to verify the location of wearable sensors mounted on the patient’s body by inferring differences in atmospheric air pressure and received signal strength indication measurements from wearable sensors. Extensive two-sample
RESULTS:
The proposed scheme could easily recognize a 30-cm horizontal body range and a 65-cm vertical body range to correctly perform sensor localization and limb identification.
CONCLUSIONS:
All experiments indicate that the scheme is suitable for identifying wearable sensor positions in an indoor environment.
Keywords
Introduction
Wireless body area networks (WBANs) are also called body sensor networks and can also be used widely in military, sports, medicine, and other fields. In military, especially along borders where terrorists attack at any time, WBANs are a good fit. In sports, the physical fitness of an athlete can be checked using the WBAN technology. In medicine, WBANs have emerged as a vital technology capable of providing better methods to diagnose various hazardous diseases [1]. This technology can be used for patients suffering from asthma, heart problem, diabetes, Alzheimer’s disease, Parkinson’s disease, and others. Handicapped people can benefit from this technology if they are blind, as retina prosthesis chips can be implanted within the human eye to improve the vision quality [2]. Nano and microdevices are developed and implanted in, on, or around the human body to measure different physiological signals. Different heterogeneous sensors, for example electrocardiogram sensors, electroencephalogram sensors, and blood pressure measuring sensors, could be used to monitor different body parameters.
An example of WBAN platform illustrating possible on-body sensor types and its environment [3].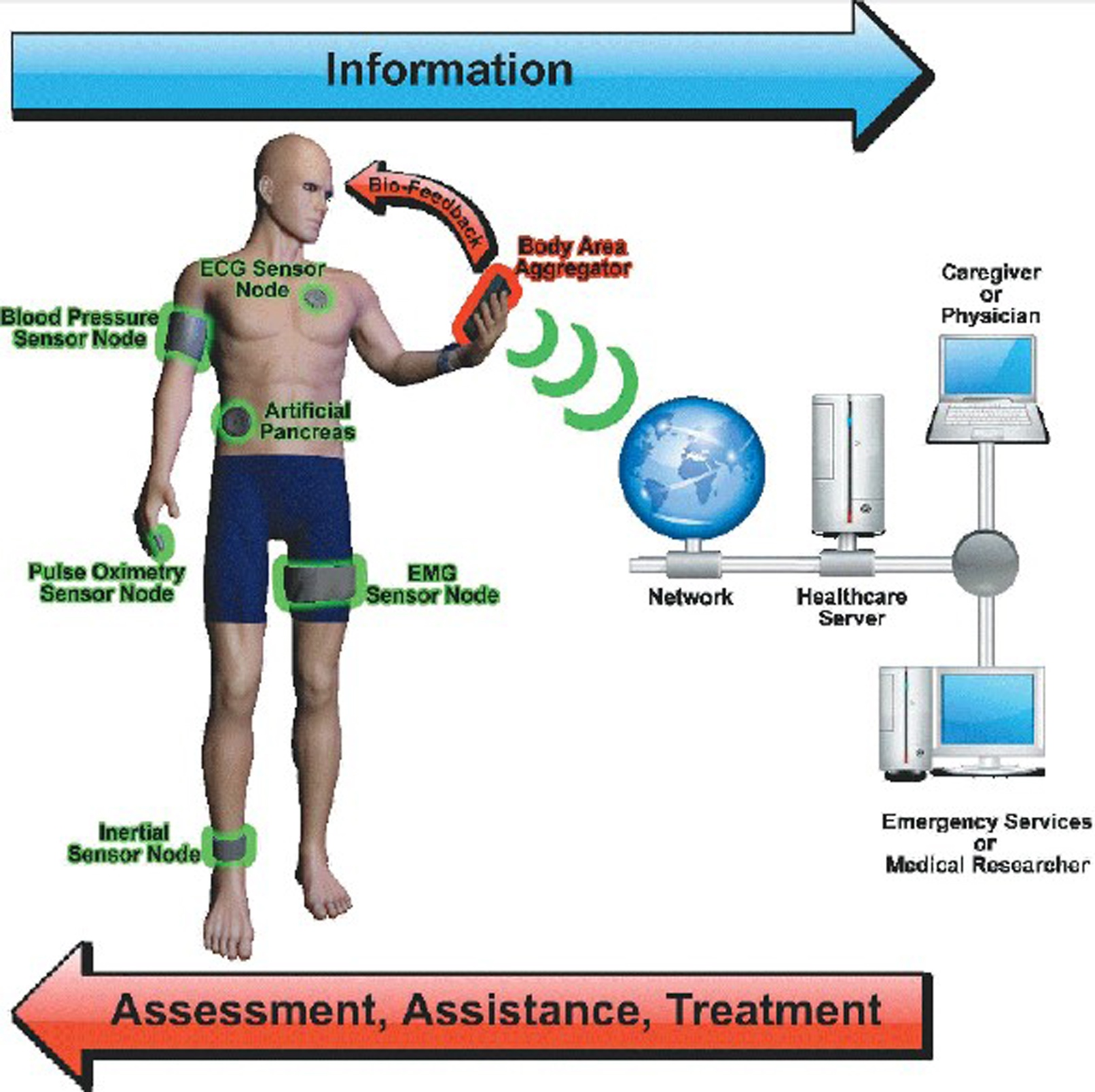
Two algorithms of the proposed scheme.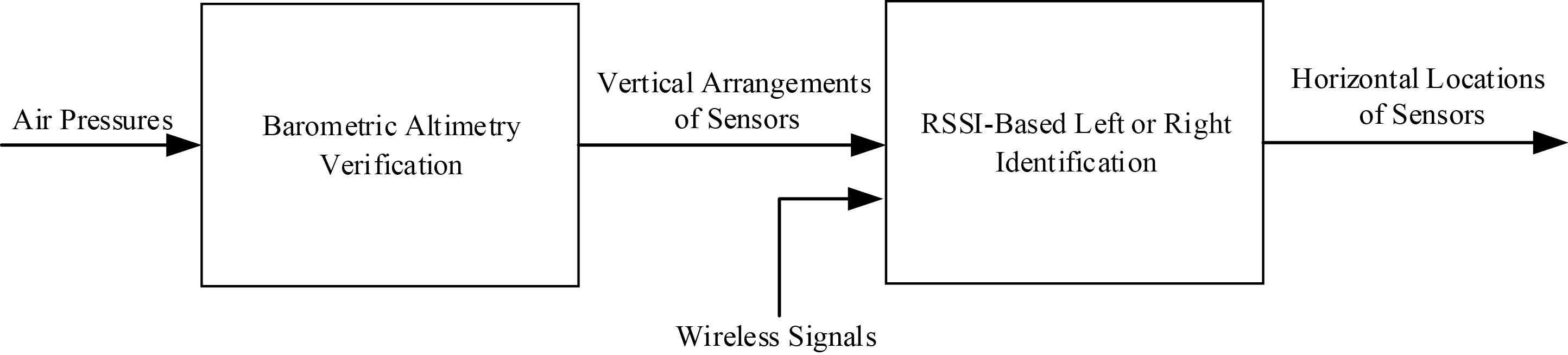
WBANs typically consist of a group of collaborating wearable sensors placed on near or within several locations of the human body, individually or through a combination (Fig. 1) [3, 4].
Wearable sensors are vital in on-body medical applications. They can be worn attached to the body in the form of adhesive pads, armbands, and leg straps, and removed for daily activities such as bathing or swimming, where sensors may get damaged. However, this flexibility enhances the opportunity of misplacement of sensors. For instance, a clinician, who detected dyskinesia symptoms in a patient with Parkinson’s disease, might obtain conflicting information if the physical placement of a sensor mismatches with its true target position. This mismatch might arise from wrong placement by patients or skilled medicine personnel. However, research on detecting node placement is still limited.
Motivated by the aforementioned observation, this study focuses on designing a new scheme to calculate and detect the positions of wearable sensors without beacon nodes know their own locations. Wearable sensors worn around the body can consist of identical hardware to minimize the design and manufacturing cost. Once the location of the wearable sensor is known, the examination can be carried out by using the corresponding programs. Each diagnosis need not be designed and programmed differently. As illustrated in Fig. 2, the proposed scheme is composed of two algorithms: Barometric altimetry verification (BAV) and received signal strength indication (RSSI)-based left or right identification (RBLRI). In BAV, the instantaneous air pressure at the location of each wearable sensor is measured and analyzed to calculate the vertical location of the sensor on a scale relative to the wearer. RBLRI demonstrates that each wearable sensor is capable of detecting distance changes sufficient to distinguish between the relative location of the patient’s left and right limb, thus making it possible to recognize which wearable sensor is placed on which limb.
The air pressure remains relatively stable in the horizontal direction with distance, but is quite sensitive to changes in the vertical direction. BAVBAV uses instantaneous air pressures to eliminate measurement errors arising from the irregular changes of atmospheric pressure. However, RSSI is dependent on the environment. In indoor environments, the wireless channel is quite noisy, and the radio frequency signal can suffer from reflection, diffraction, and multipath effect [5]. These factors can make the RSSI values fluctuate. To address the problem, the present study performs the RSSI treatment processing under a clear line of sight to determine the best area for the location verification of wearable sensors. RSSI is measured in the selected optimal areas by analyzing and optimizing the measurements. Such a scheme would, once per sensor placement, automatically calculate the sensor locations and provide immediate self-compensates.
The proposed scheme contains the following general features:
It determines the vertical arrangement of wearable sensors mounted along the height of a patient’s body using the barometric height formula and measuring instantaneous air pressures at sensors. It distinguishes the horizontal location of wearable sensors by employing the ranging model and measuring RSSI values at sensors. Considering the effect of the working environment on the relationship between RSSI and distance, it determines the patient’s standing position to improve RSSI measurement accuracy. It performs two-sample
The organization of the rest of the study is as follows. Section 2 describes related studies about limb position recognition. Section 3 describes the system structure. Section 4 introduces the barometric height formula and experimentally verifies the BAV approach. Section 5 introduces the RSSI ranging model and the effect of the working environment on signal strength measurements, and experimentally verifies the proposed RBLRI method. Section 6 provides the conclusion.
Previous studies referenced in this field focus on WBANs measurements based on costly pieces of equipment, either for channel-modeling purposes [6] or for the validation of on-body localization algorithms based on impulse radio [7, 8, 9, 10]. A previous study presents a technique to capture motion data to estimate the positions of sensors on the user’s body, employing mixed supervised and unsupervised learning approaches [11]. It can achieve 89% accuracy in determining the location of the device. However, this technique needs off-body processing and 30-min motion information, which makes it unsuitable for real-time limb monitoring. Moreover, the obtained accuracy greatly depends on the measured limb. Another study proposes an automatic identification method (AIM) enabling unassisted sensor nodes to continuously monitor node locations [12]. However, the scheme merely addresses the verification problem of the vertical location of the sensor, which limits the scope of application of the scheme.
RSSI has the advantages of low cost, low power, and accessibility; therefore, it becomes the most used technology in a diverse range of systems [13]. Even for noisy indoor environments, an average positioning error of 50 cm on an area of 3.5
Motivated by the aforementioned observation, the present study used air pressures and RSSI measurements to determine the positions of wearable sensors, without the help of stationary hardware. The present study is novel in combining the barometric altimetry technology with RSSI localization technology to present a verification scheme that can distinguish which wearable sensor is placed on which limb (especially, identifying the left or right limb).
The proposed scheme contains the following obvious advantages:
It is capable of monitoring distance changes to recognize which wearable sensor is placed on which limb. By this scheme, individual elements of the sensor can be easily replaced or compensated for to allow further operation. It can distinguish between different wearable sensors attached at the same altitude on the patient’s body. It can improve the security of wearable sensors for medical applications, as it guarantees the correct localization of each node mounted on the patient’s body. It depends neither on considerable sensors to execute localization nor on beacons that know their own locations to execute distance measurement. It can be easily extended to more than four wearable sensors for medical applications.
Topology of WBAN platform.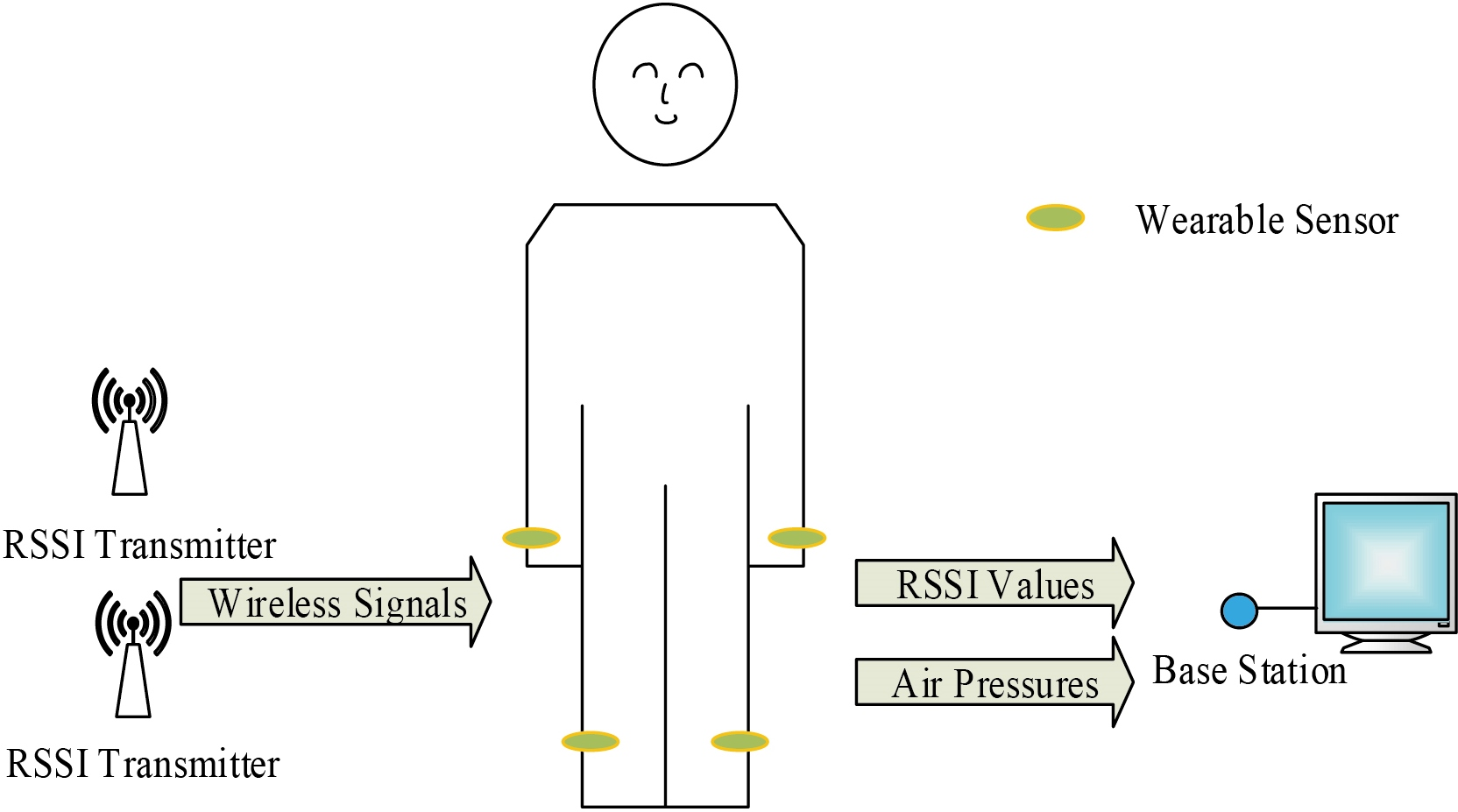
The prototype system consists of four wearable sensors, two RSSI transmitters, a base station (BS), and a personal computer (PC), as illustrated in Fig. 3. The Crossbow TelosB sensor node is employed in this study because of its ready-to-use format. Moreover, each wearable sensor on the patient’s limb has an added high-precision and low-power air pressure sensor, Bosch BMP180. RSSI transmitters periodically send singles to wearable sensor nodes. One RSSI transmitter is placed on the floor and the other at the height 0.8 m above the floor. Wearable sensors transmit the measured data to BS, which in turn forwards this data to the PC connected to it.
Trend of altitude with air pressure.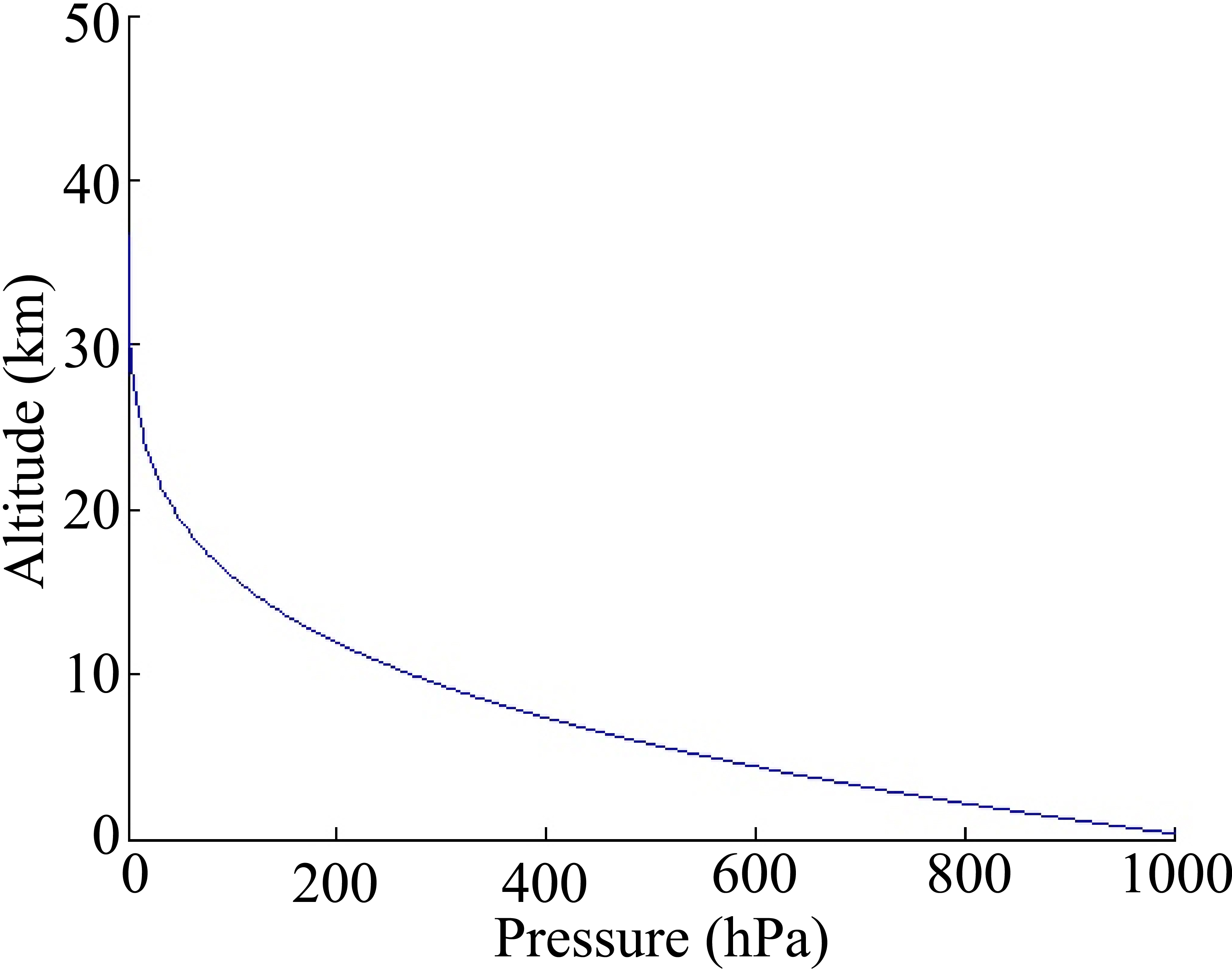
The barometric altimetry verification method.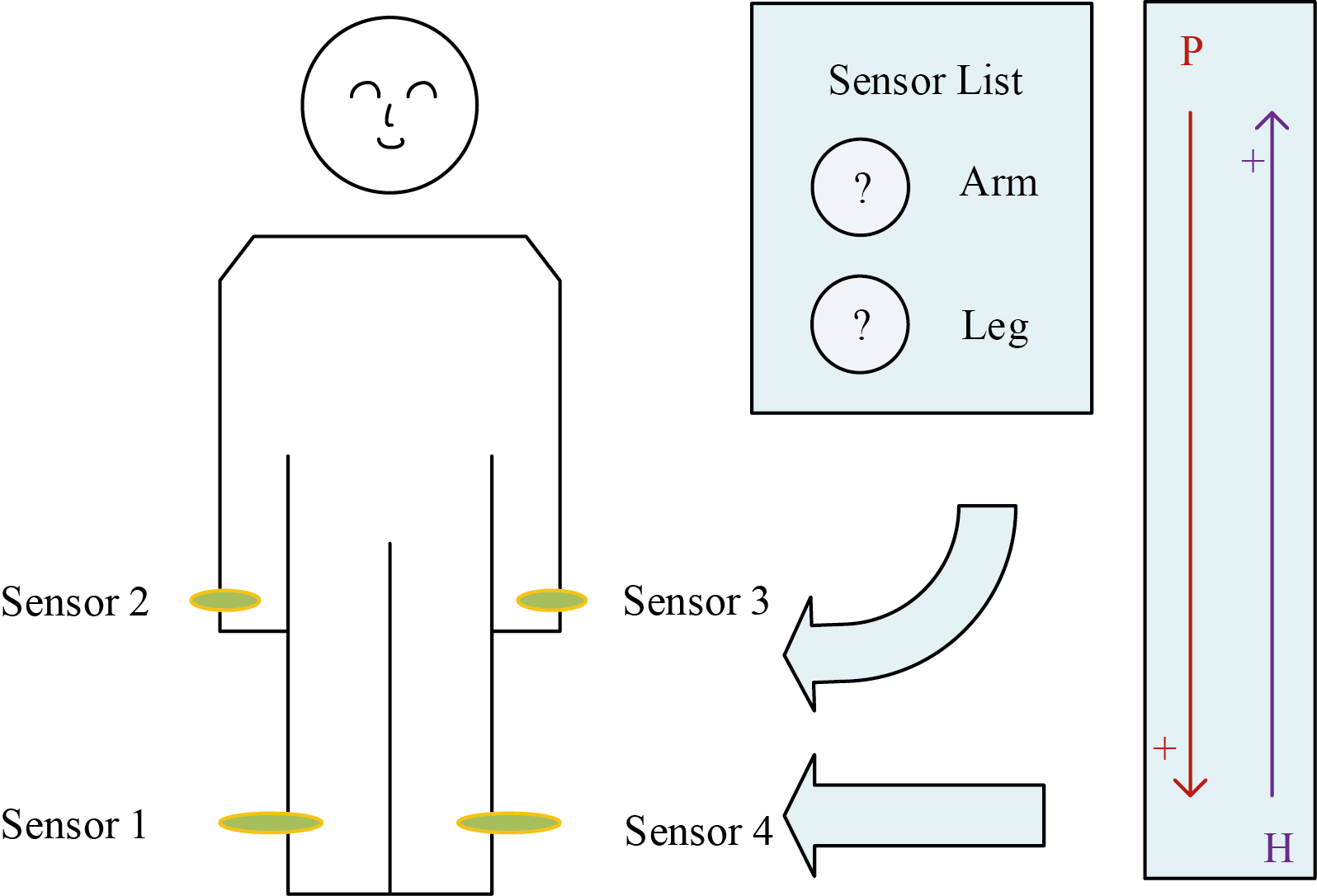
In this section, we develop a barometric altimetry verification to verify the vertical location of the sensor placed on the body.
BAV algorithm
BAV algorithm
Barometric altimetry is a traditional method to measure the altitude [15]. According to the theory of atmosphere physics [16], the vertical movement of the atmosphere is small and can be estimated in a static equilibrium state. Therefore, force in the horizontal direction cancels the net upward pressure in the vertical direction and reaches equilibrium with its own gravity. According to the standard atmospheric regulations [16], the air temperature varies linearly with height in a polytropic atmosphere. The height can be calculated as a function of the pressure under standard atmospheric conditions:
where
To minimize the pressure variations resulting from various factors, such as time and weather, the instantaneous pressures are measured to identify the vertical locations of the sensors on a scale relative to the patient, as described in Fig. 5.
Generally, a principle of “uncertainty” is reflected in the measurement of air pressure. During the initial stages of the experiments, the sensors placed near one another yielded different air pressure values at the same altitude. The sensors still yielded different values after being moved the same distance vertically. This indicated that the differences in pressure readings resulting from factory calibration coefficients differ for each sensor. The differences do not change over time. Therefore, a constant offset calibration procedure is significant to enable a reliable barometric-based WBAN location verification.
The proposed scheme is calibrated by obtaining a number of samples at a reference position (altitude
Air pressure measurement and results
The proposed method mainly utilizes differences among air pressures worn on the patient’s limbs, to obtain the precise altitudes of wearable sensors, with the help of calibration process. The detailed measurement process is as follows:
Calibration: Sensor nodes are placed on the same reference position (i.e., floor) to ensure consistency. Software requests 100 samples of atmospheric pressure data from each device. Figure 6a displays the measurement results at the same reference position and the deviation errors among sensors. In Fig. 6b, the offset of each sensor is calculated, and the deviation correction of sensors 1, 2, 3 and sensor 4 measurement data is performed. Measurement: The sensor nodes are placed on the patient’s limbs, and 100 measurement data are collected from each wearable sensor in this step. Pressure readings at each wearable sensor are taken simultaneously. Figure 6c illustrates the pressure measurements obtained from air pressure sensors. Deviation corrections of all pressure data, taking into account the calibration performed, are illustrated in Fig. 6d.
Comparison of means and standard deviations for the two methods
Comparison of means and standard deviations for the two methods
(a) Air pressure measurements at the same reference position. (b) Deviation correction to the measurements. (c) Air pressure measurements for the patient’s limb. (d) Deviation correction to the measurements.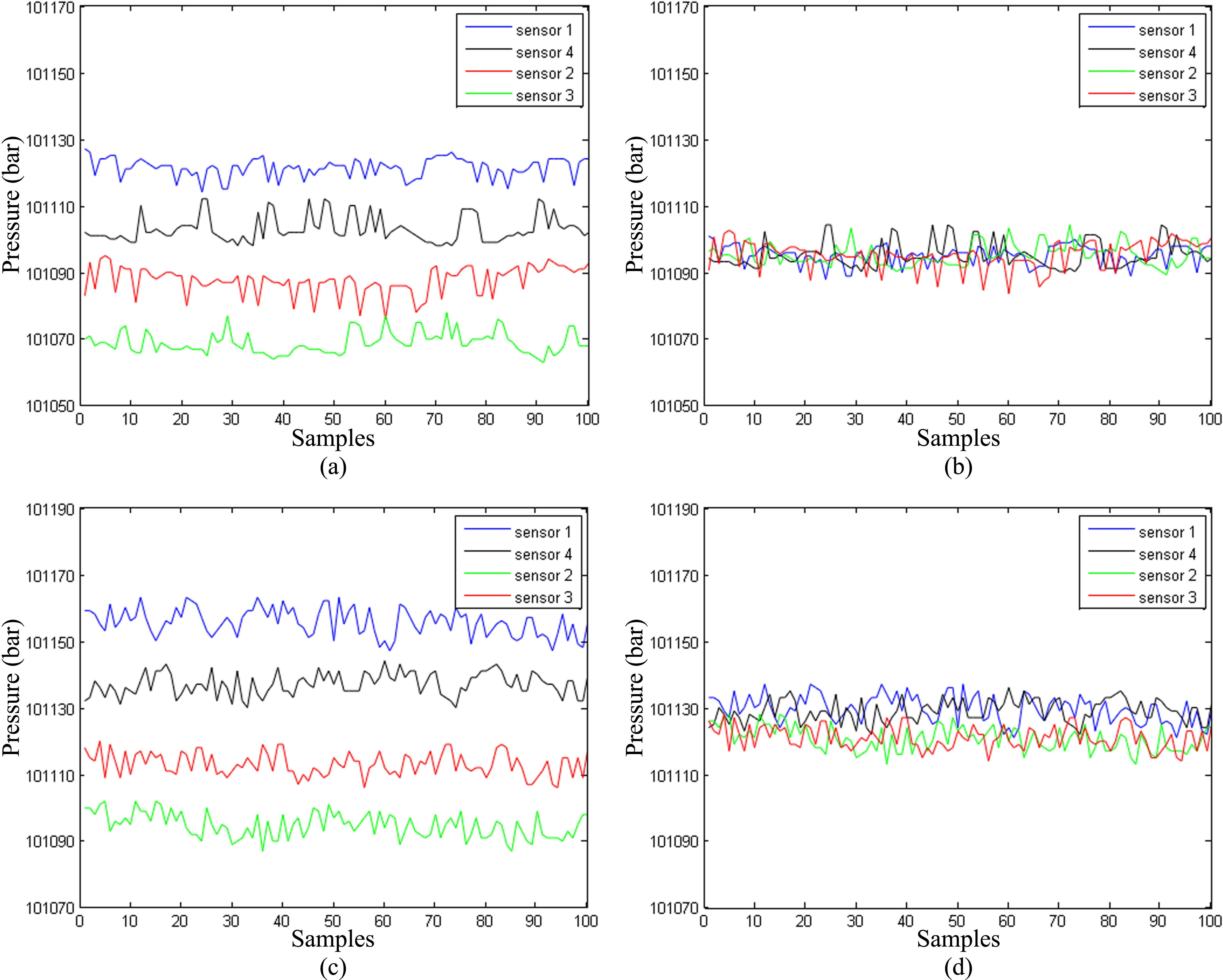
The proposed method was compared with the automatic identification method (AIM) [12] to evaluate the effectiveness of BAV. First, the performance of two methods in terms of the mean (
The significant difference of the present approach is compared with AIM through two-sample
Comparison of significant differences for the two methods
Table 3 reveals that except for groups 3 and 4, all
In groups 3 and 4, the
Therefore, BAV can achieve a much better performance on the vertical arrangement verification with very delectable results.
The proposed RBLRI is based on the distance estimation between the RSSI transmitter and the wearable sensor to recognize whether the sensor is placed on the left limb or the right limb.
Ranging model
The power of a signal traveling between sensors is the signal parameters, which include the information that reflects the distance [17]. At present, wireless signal transmission uses the theoretical shadowing model widely [18]. The theoretical model is shown in [19]:
where
where RSSI is the received signal strength indication at a distance
An RSSI value between sensors under different heights.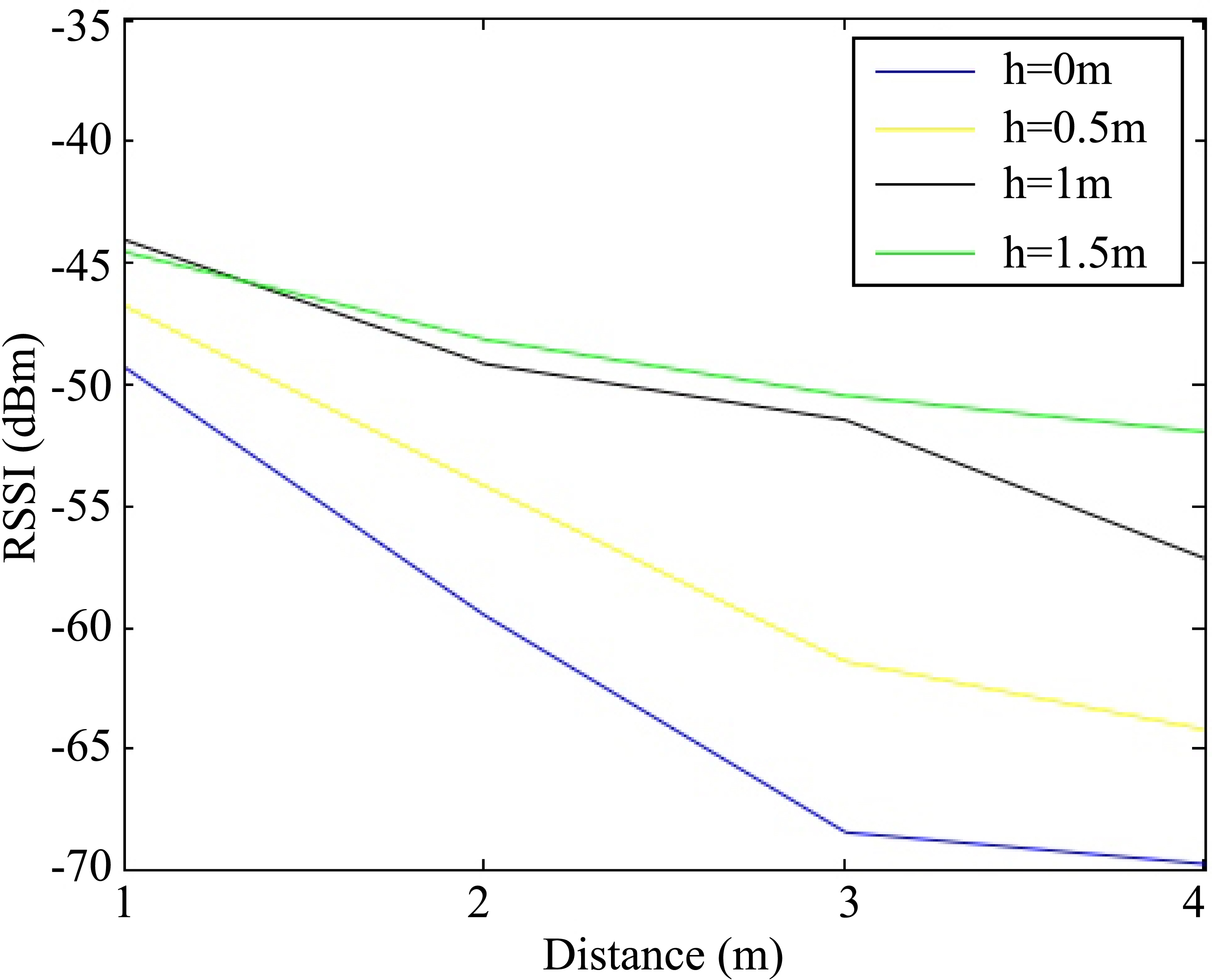
An RSSI value between sensors under different transmitting powers.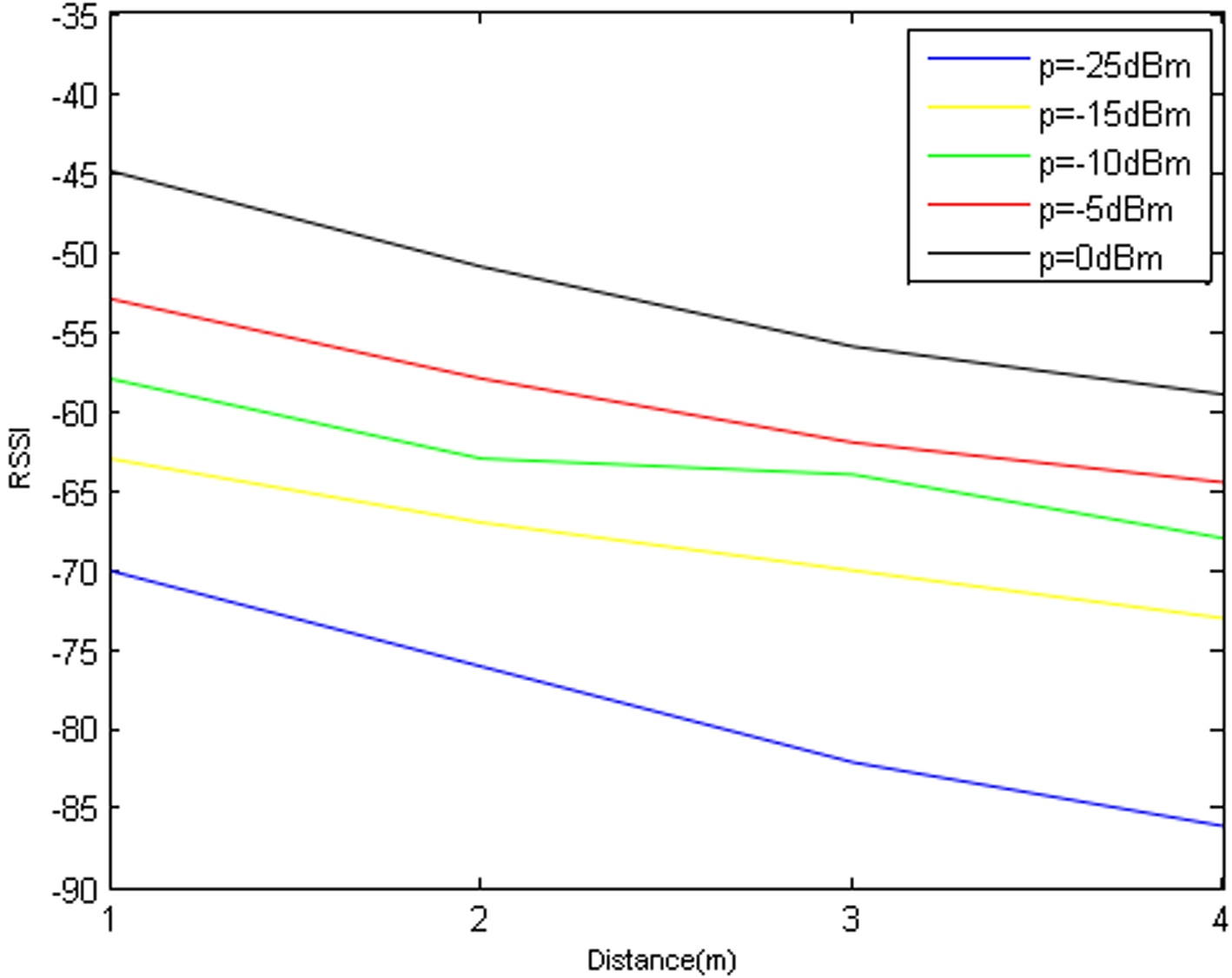
The wireless signal is always disturbed by unstable factors in practical applications. When the distance between nodes increases to a certain extent, the intensifying interferences of radio signals make RSSI measurements appear to jump. At this point, the error is serious and the measured RSSI becomes an invalid value. Hence, the effect of the working environment on the RSSI and the distance need to be considered In a real context, the sensor deployment and the output power of the transmitter will influence RSSI accuracy.
Therefore, two significant analyses are performed under different conditions to improve RSSI accuracy. First, the transmitting power of the RSSI transmitter is set to its highest level (0 dBm), the height of the transmitter and receiver is adjusted, and the meaningful range of RSSI values is analyzed when the distance between transmitter and receiver is varied. Second, the height of the RSSI transmitter and receiver is set to 0.8 m above the ground, the transmitting power is adjusted, and the relationship between the RSSI values and the distance is figured out. One sensor may be picked up from four wearable sensors to receive radio signals.
RBLRI algorithm
RBLRI algorithm
The core of the experiment is to determine the relationship between RSSI and distance under different deployment rules. At each distance
Generally, the RSSI attenuation increases with distance. The attenuation increases fast as the distance increases from 1 to 2 m, when the transmitter and receiver are simultaneously placed at a height
Moreover, RSSI values will show an attenuation trend as distance increases, but it dodoes not extremely decrease progressively. In Fig. 7, the relationship between RSSI and distance is not a rigid straight line, as there is a degree of fluctuation. The closer the transmission distance, the faster the decrease in RSSI value, causing a larger difference of RSSI between the left and right the limbs. This contributes to distinguishing which sensor is placed on which limb. Therefore, RSSI values can obtain a higher accuracy in shorter distances.
Comparison of means and standard deviations in three sensor deployments
Comparison of means and standard deviations in three sensor deployments
Comparison of the significant differences among three deployments
Transmission tests are performed to understand the meaningful range of RSSI under different transmitting powers. The recorded RSSI is also given the average of 100 times for test data. For various power levels (0, 1, 2, 3, 6, 9, 15, 21, 27 and 31) equal to (
As illustrated in Fig. 8, when the sensor transmitting power is
The relationship between RSSI and distance conforms to the channel model. When sensors have a short distance, the RSSI attenuation is linear. Conversely, when the distance between sensors increases to a certain extent, the RSSI is affected by a large disturbance. At this point, the calculated distance error is serious. The uncertainty of RSSI increases as the receiver moves further away from the transmitter. Therefore, RSSI values can obtain a higher accuracy in shorter distances. The RBLRIRBLRI algorithm is described in Table 4.
RSSI measurements under different sensor deployments. (a) Two RSSI transmitters are placed on the floor. (b) Two RSSI transmitters are placed at a height of 0.8 m above the floor. (c) One transmitter on the floor and the other one at a height of 0.8 m above the floor.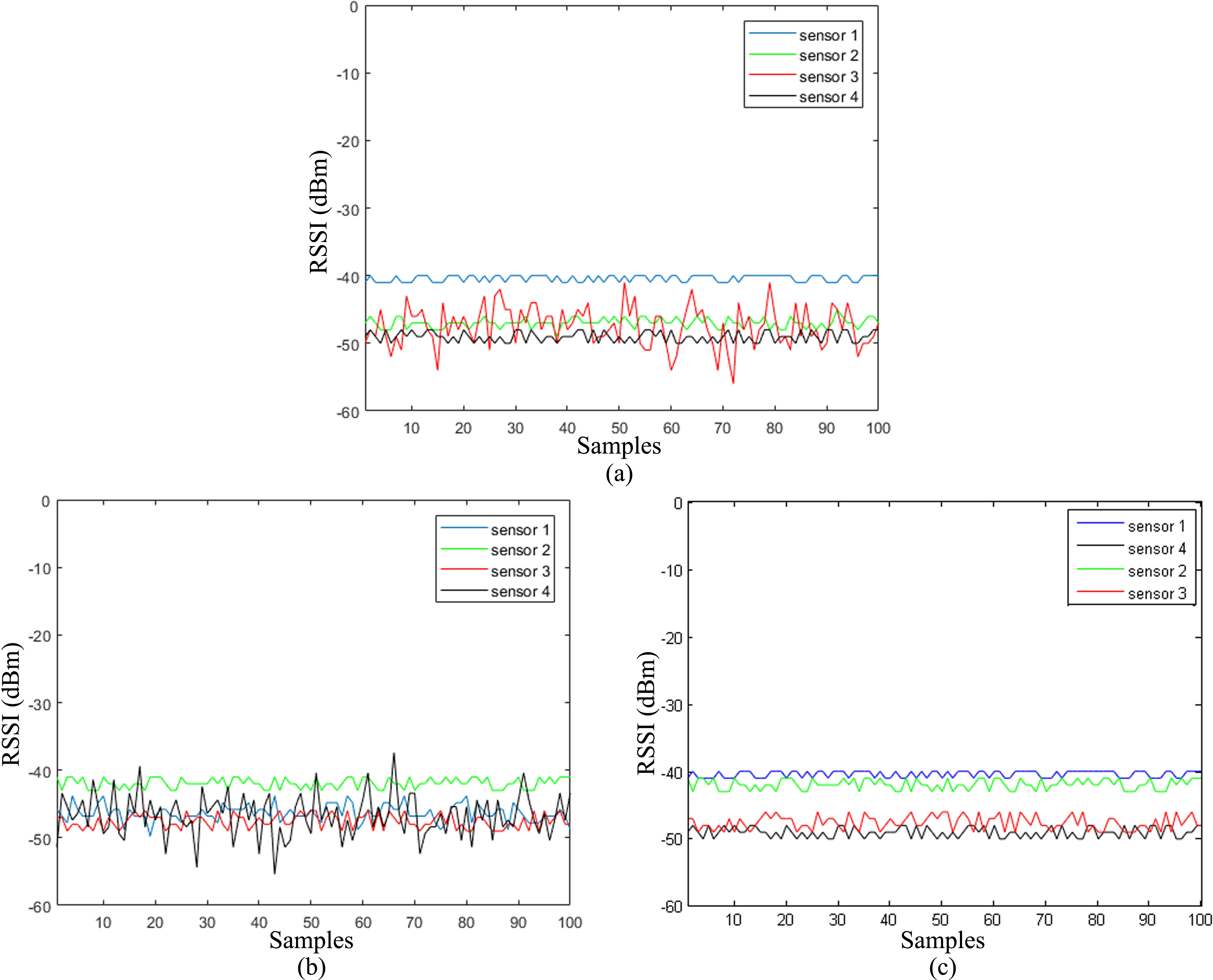
From the aforementioned BAV experiment, both sensors 1 and 4 are the leg nodes and sensors 2 and 3 are the wrist nodes. Hence, the RSSI difference between sensors 1 and 4, and between sensors 2 and 3 need to be considered.
Extensive simulations were performed under different conditions to evaluate the performance of BAV. First, the results from different sensor deployments were compared and analyzed. Then, the identification results under different transmitting powers were compared. Every experiment collects 100 RSSI measurements in each wearable sensor. The transmitting power of the RSSI transmitter is set to 0 dBm.
Figure 9 indicates the RSSI measurements for three sensor deployments. Sensor 3 in Fig. 9a and sensor 4 in Fig. 9b have a larger fluctuation. This is consistent with the aforementioned idea that the farther the transmission distance is from the transmitter to the receiver, the more the RSSI fluctuates. Moreover, the body interference might be also a reason.
Subsequently, the mean
The significant difference among three sensor deployments is compared through two-sample
Table 6 reveals that in the first deployment, the
In the third deployment, group 1 (between sensors 1 and 4) has an RSSI difference measurement of 8.63 dBm on an average, with a measured difference of 8.44–8.81 dBm with a 95% CI; group 2 (between sensors 2 and 3) has an RSSI has different measurement of 5.65 dBm an average, with a measured difference of 8.44–8.81 dBm with a 95% CI. Moreover, two-sample
Comparison of means and standard deviations among the three transmitting powers
Comparison of means and standard deviations among the three transmitting powers
Comparison of significant differences among the three transmitting powers
The proposed setup.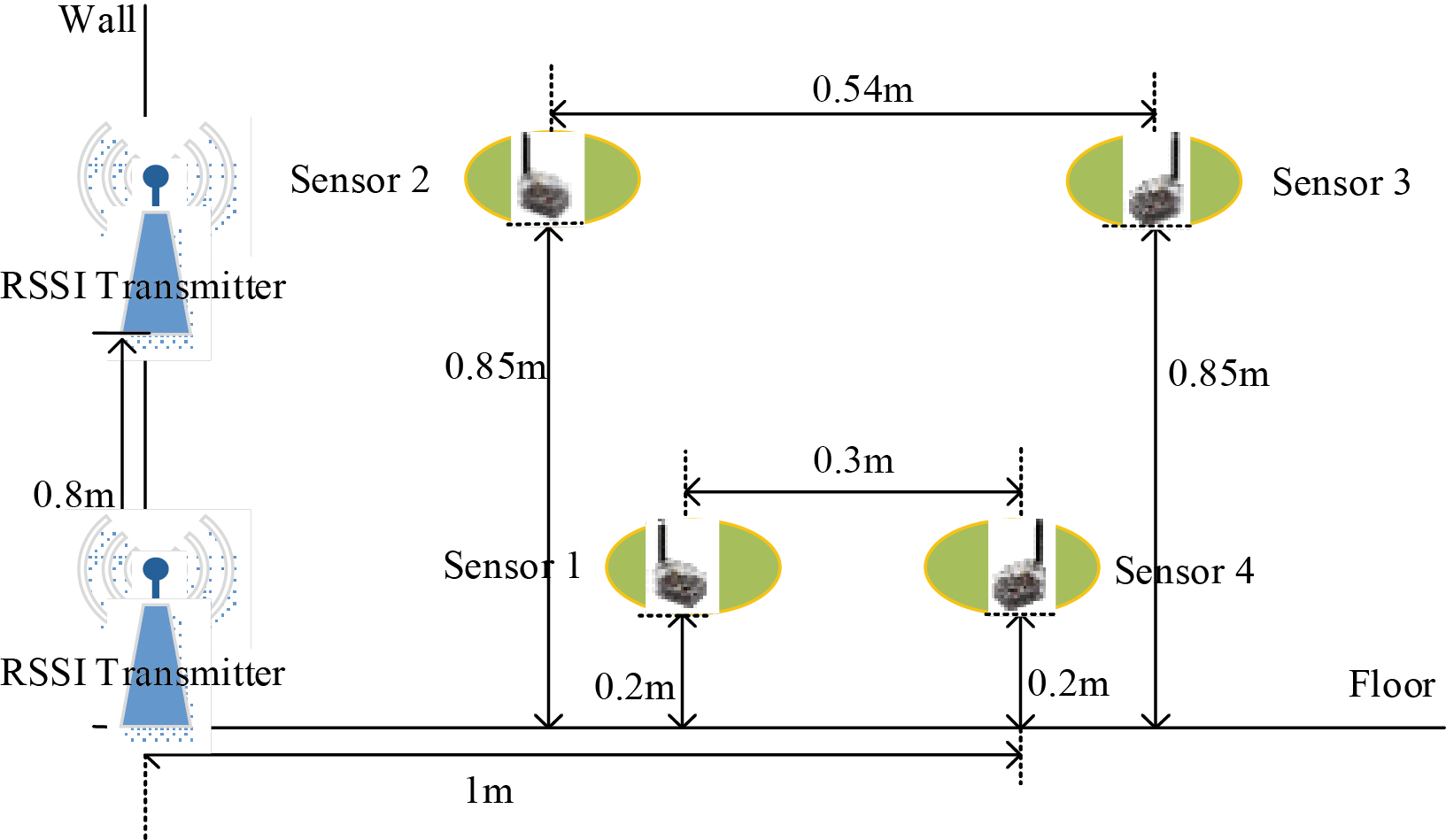
Therefore, sensor 1 is the right leg node, sensor 2 is the right wrist node, sensor 3 is the left wrist node, and sensor 4 is the left leg node. The proposed setup is illustrated in Fig. 10.
Besides, the performance of RBLRI is examined using three transmitting powers. The 0,
RSSI measurements of four sensors under transmitting powers. (a) The 0 dBm transmitting power. (b) The 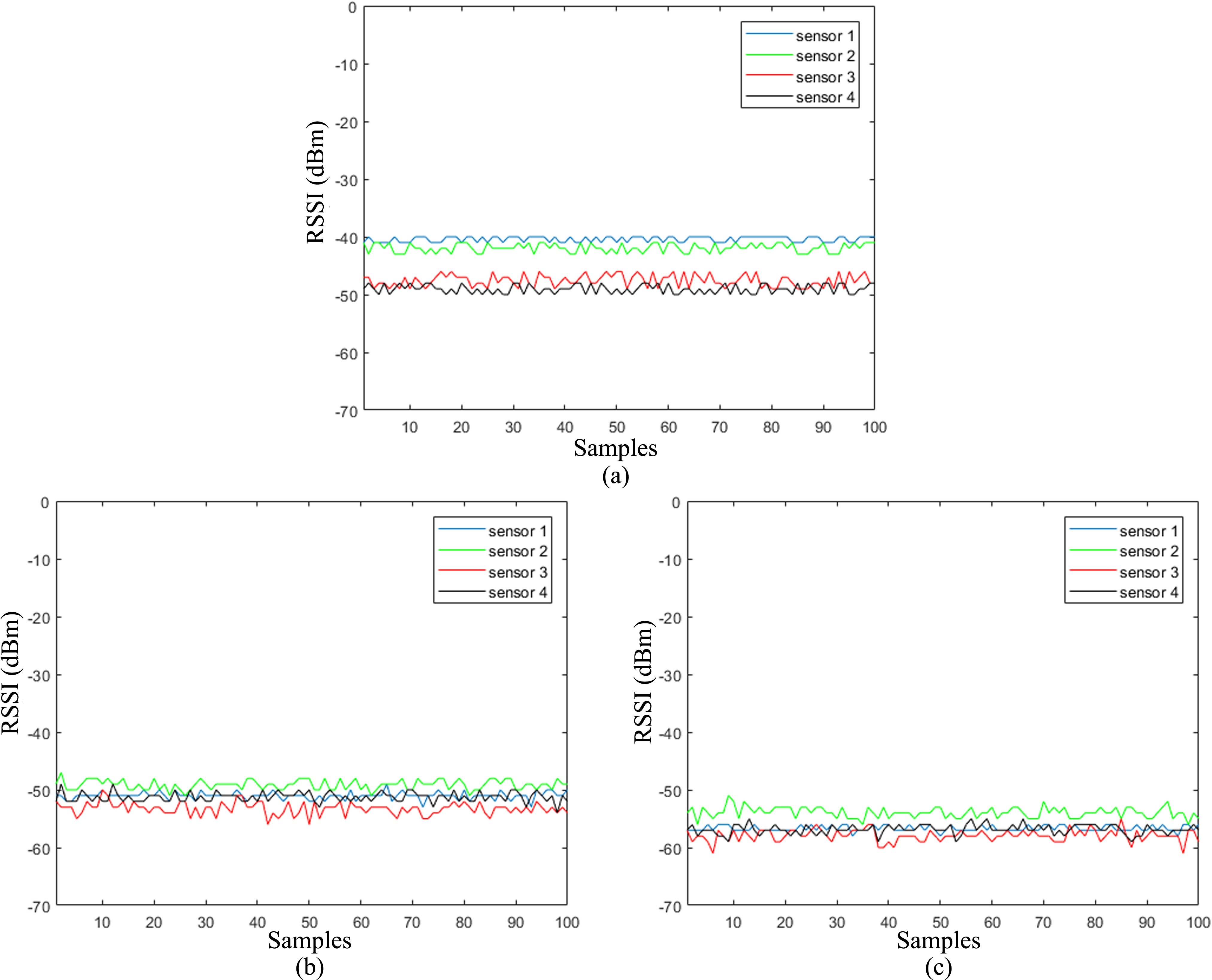
Figure 11 indicates the RSSI measurements for three sensor deployments. All RSSI measurements are quite close in the
The
Further, the significant difference among three transmitting powers through two-sample
Table 8 reveals that in the
Sensor misplacement could obtain the inconsistent data with the desired patterns at the designated location. This study proposes a new scheme to enable WBANs to instantly recognize which wearable sensor is placed on which limb of the patient. Hypsometry information is employed in the air pressure distribution to determine the vertical location of the wearable sensors. Moreover, the present study demonstrates the meaningful range of the RSSI for identifying the horizontal positions of wearable sensors. To validate the proposed scheme, comprehensive statistical analyses are conducted. This scheme is applicable to home-based old people and patients with tremors or dyskinesia symptoms without the help of the caregiver.
The most important steps, which should be further investigated in the future, are to test the proposed scheme in a large-scale study and expand the types of contextual information from wearable sensors, for instance, by adding heart rate sensors to further monitor body states.
Footnotes
Acknowledgments
The work was supported by the National High Technology Research and Development Program of China (Grant No. 2015AA016005), the National Natural Science Foundation of China (Grant No. 61402096), and China Postdoctoral Science Foundation (Grant No. 2016M591448).
Conflict of interest
None to report.