
Abstract
BACKGROUND:
Massage robot is considered as an effective physiological treatment to relieve fatigue, improve blood circulation, relax muscle tone, etc. The simple massage equipment quickly spread into market due to low cost, but they are not widely accepted due to restricted massage function. Complicated structure and high cost caused difficulties for developing multi-function massage equipment.
OBJECTIVE:
This paper presents a novel massage robot which can achieve tapping, rolling, kneading and other massage operations, and proposes an improved reciprocating path planning algorithm to improve massage effect.
METHODS:
The number of coil turns, the coil current and the distance between massage head and yoke were chosen to investigate the influence on massage force by finite element method. The control system model of the wheeled massage robot was established, including control subsystem of the motor, path algorithm control subsystem, parameter module of the massage robot and virtual reality interface module. The improved reciprocating path planning algorithm was proposed to improve regional coverage rate and massage effect.
RESULTS:
The influence caused by coil current, the number of coil turns and the distance between massage head and yoke were simulated in Maxwell. It indicated that coil current has more important influence compared to the other two factors. The path planning simulation of the massage robot was completed in Matlab, and the results show that the improved reciprocating path planning algorithm achieved higher coverage rate than the traditional algorithm.
CONCLUSIONS:
With the analysis of simulation results, it can be concluded that the number of coil turns and the distance between the moving iron core and the yoke could be determined prior to coil current, and the force can be controllable by optimizing structure parameters of massage head and adjusting coil current. Meanwhile, it demonstrates that the proposed algorithm could effectively improve path coverage rate during massage operations, therefore the massage effect can be improved.
Introduction
Massage equipment can effectively alleviate the shortage of masseur/masseuse, and help to improve the quality of life for the elderly or those who are suffering from bone/muscle diseases [1, 2]. The existing massage apparatuses, which act like a human hand to perform massage operations by mechanical tool, airbags and electric device to promote blood circulation and eliminate muscle fatigue [3, 4]. All over the world many research institutes made efforts to improve massage effect [5, 6].
Ishii et al. [7] developed a 6 DOF facial tissue massage robotic system for oral disease and achieved a simple manipulator of bite tendons and other parts of the parotid gland. Luo and Chang [8] designed a multi-fingered robotic hand specifically for traditional Chinese medicine (TCM) massage operations and tested the massage effect. Moreover, some medical robots and surgical-assisted robots were developed to improve medical condition of rehabilitation [9, 10]. On the one hand, simple massage equipment quickly spread into market due to low cost, but they are not widely accepted due to restricted massage function. On the other hand, the development of multi-function massage equipment is difficult due to its complex structure, difficulty in control and high cost. Therefore, this paper presents a novel massage robot with the features of portable structure, multi-function and high intelligence, and focuses on proposing an improved path planning algorithm to improve coverage rate and massage effect.
Structure design and model analysis
Structure of the massage robot
The structure of the presented wheeled massage robot is demonstrated in Fig. 2, which is mainly composed of tapping head, left and right driving wheels, front and rear driving wheels and sensors. The tapping head based on electromagnetic induction is mainly used to achieve tapping massage operation, and the driving wheels achieve rolling and kneading massage. Infrared distance sensors and crash sensors are placed around the wheeled massage robot (see Fig. 2) to detect environmental information of human back and achieve direction control of the massage robot.
Schematic configuration of massage robot. Massage head structure.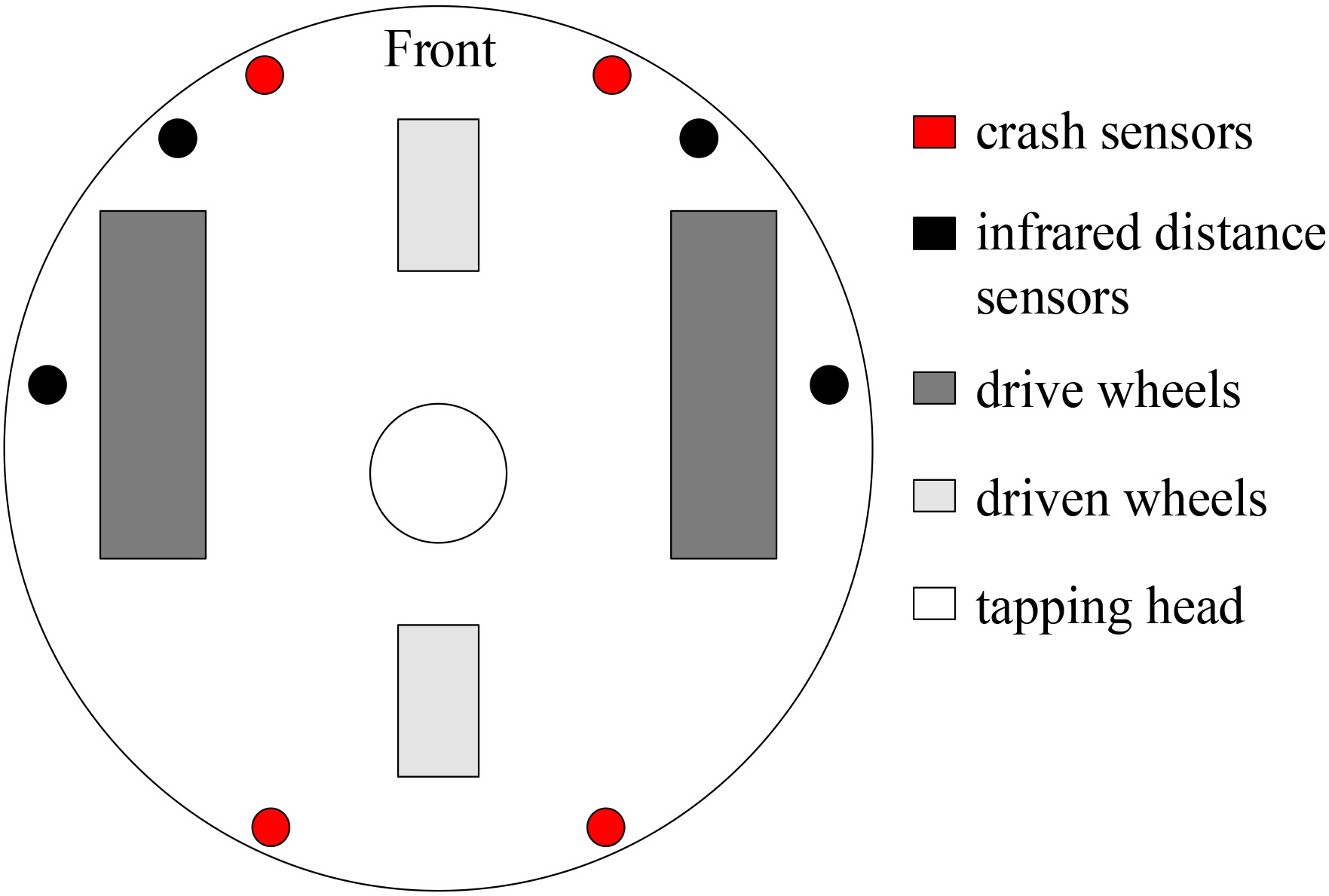
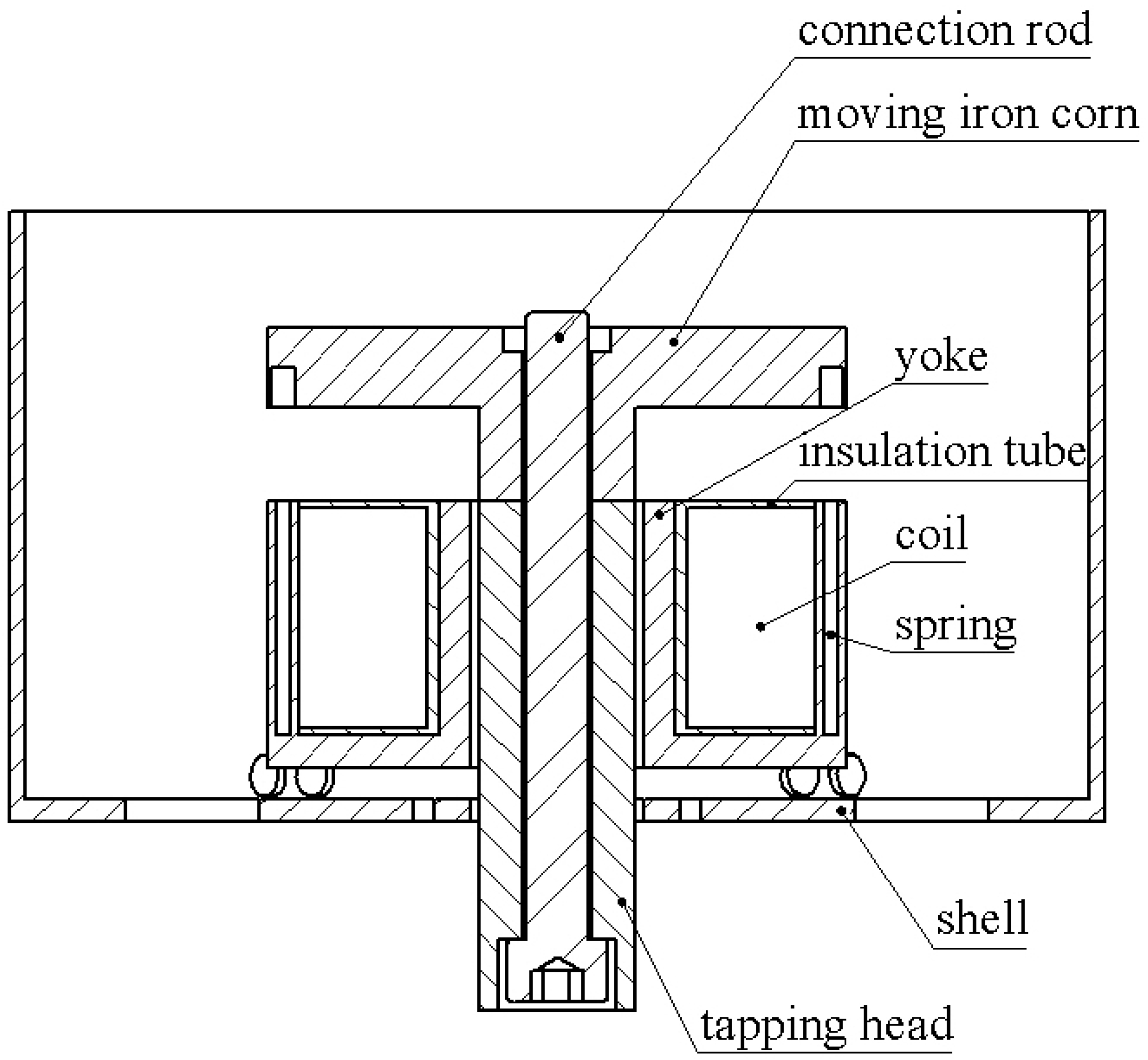
In the previous work, tapping massage head (see Fig. 2) was designed and mounted on a mobile platform, which could change the massage area by moving the platform. During movement, the massage head should avoid touching human body to improve comfort. Therefore, a spring-based structure was design to balance the gravity of massage head. Massage head taps down with the action of springs, a yoke was added to increase the electromagnetic force which overcomes the spring force to achieve tapping operation.
The massage head works as follows: the winding coil is placed around the yoke, the movable core is magnetized when the coil is energized and it linearly moves under the action of the electromagnetic force. When the coil is powered off, the electromagnetic force disappears, the movable core return to the original position with the spring force. Tapping operation periodically takes place as the coil is periodically powered on.
The model of robot massage head includes three parts, namely the electrical circuit, the magnetic circuit and the mechanics.
Windings and moving iron core part can be simplified as a resistance-inductance model. The driving voltage is
The equivalent inductance is
Where,
To simplify the calculation, we assume that the coil inductance
To solve Eq. (3), the coil current of massage head could be calculated as
Where,
Where,
The magnetized moving iron core taps down with the action of electromagnetic force. It moves under the interaction of electromagnetic force, spring force and body back resistance. The motion equation is
The differential equation of motion by combining Eqs (2.2) and (6) is
Where,
The equations from Eqs (1) to (6) show the factors which affect the dynamic characteristics of the massage head.
Parameterization analysis
The orthogonal experiment method was used to analyze the sensitivity in this paper. Orthogonal experiment is the mathematical method which organizes and analyzes multi-factor scientifically [11]. In this paper, tapping intensity design scheme was made by orthogonal experiment method. Factors such as magnetic materials and the mass of massage head are generally pre-selected, so their influence on the electromagnetic force does not need to be analyzed. The main factors which affect the massage head pounding strength can be identified as:
Factor
To investigate the influence from the above factors, three levels (three values) were chosen for each factor, then there are totally 27 kinds of programs for the three chosen factors. However, it is not necessary to calculate all programs according to the aforementioned method. The maximum and minimum tapping force programs can be quickly and accurately determined by a few programs with the theory of orthogonal experiment method.
The number of turns can be determined between 2000 and 2200 turns depending on the size of the yoke and the coil. Accordingly, three levels of factor
Analysis of orthogonal experiment
The finite element simulation method was used to calculate the initial electromagnetic force
| Group | Programs | The initial electromagnetic |
|---|---|---|
| force |
||
|
|
|
3.86 |
|
|
|
4.57 |
|
|
|
5.34 |
|
|
|
3.81 |
|
|
|
5.79 |
|
|
|
4.28 |
|
|
|
4.81 |
|
|
|
3.58 |
|
|
|
5.48 |
Average and deviation of all these factors
Comparing the results shown in Table 2, it indicates that the deviation of factor B is much larger than factors A and C, which is 0.0461. So the coil current is the most important factor for electromagnetic force compared to the other two factors. Therefore, the number of turns and the distance between the moving iron core and the yoke could be determined based on the requirements of massage operation. Then, massage intensity could be controlled by adjusting the coil current value.
Requirements of path planning
There are two massage paths based on the wheeled massage robot, tapping path and rolling/kneading path. Tapping path is the motion area of the tapping head of electromagnetic induction, rolling/kneading path is the motion area of the two driving wheels.
To get better massage effect, the requirements for path planning of massage robot were discussed and summarized as follows:
Massage path must cover the entire massage area with high coverage rate; Be able to avoid all the obstacles and the edge of the human back; Walking path is composed of simple trajectory (straight line, arc); Path duplicate should be available.
The improved reciprocating path planning algorithm
The goal of complete coverage path planning is to make mobile robot efficiently move on the whole planned area and avoid obstacles, which requires the robot to traverse all the reachable area of human back area [12, 13]. Massage path planning of the designed wheeled massage robot belongs to the range of typical complete coverage path planning. The TCM massage order generally cycles from top to bottom, and from inside to outside. Therefore, this paper chose reciprocating path planning algorithm to complete motion control of the massage robot.
The object of this study is a new wheeled massage robot which works on the human back, and it cannot be considered as a particle compared to the back area. For tapping massage path, only the middle path of the massage area is valid. For rolling/kneading and other massage path, only the path of two wheels is valid. It can be calculated that the effective massage area is about one-third or two-thirds of the whole massage area when the massage robot moves along a circle. Therefore, this paper proposed the improved reciprocating path planning algorithm to improve regional coverage rate and massage effect.
The diagram of the improved reciprocating path planning algorithm is depicted in Fig. 3, the basic principle is described as follows: taking the reciprocating path planning algorithm as the foundation, the massage robot uses the infrared distance sensors and crash sensors to determine if there is a cliff (edge) or an obstacle during moving. When an obstacle or a cliff is detected, the massage robot immediately turns right 90
Principle description of the improved reciprocating path planning algorithm.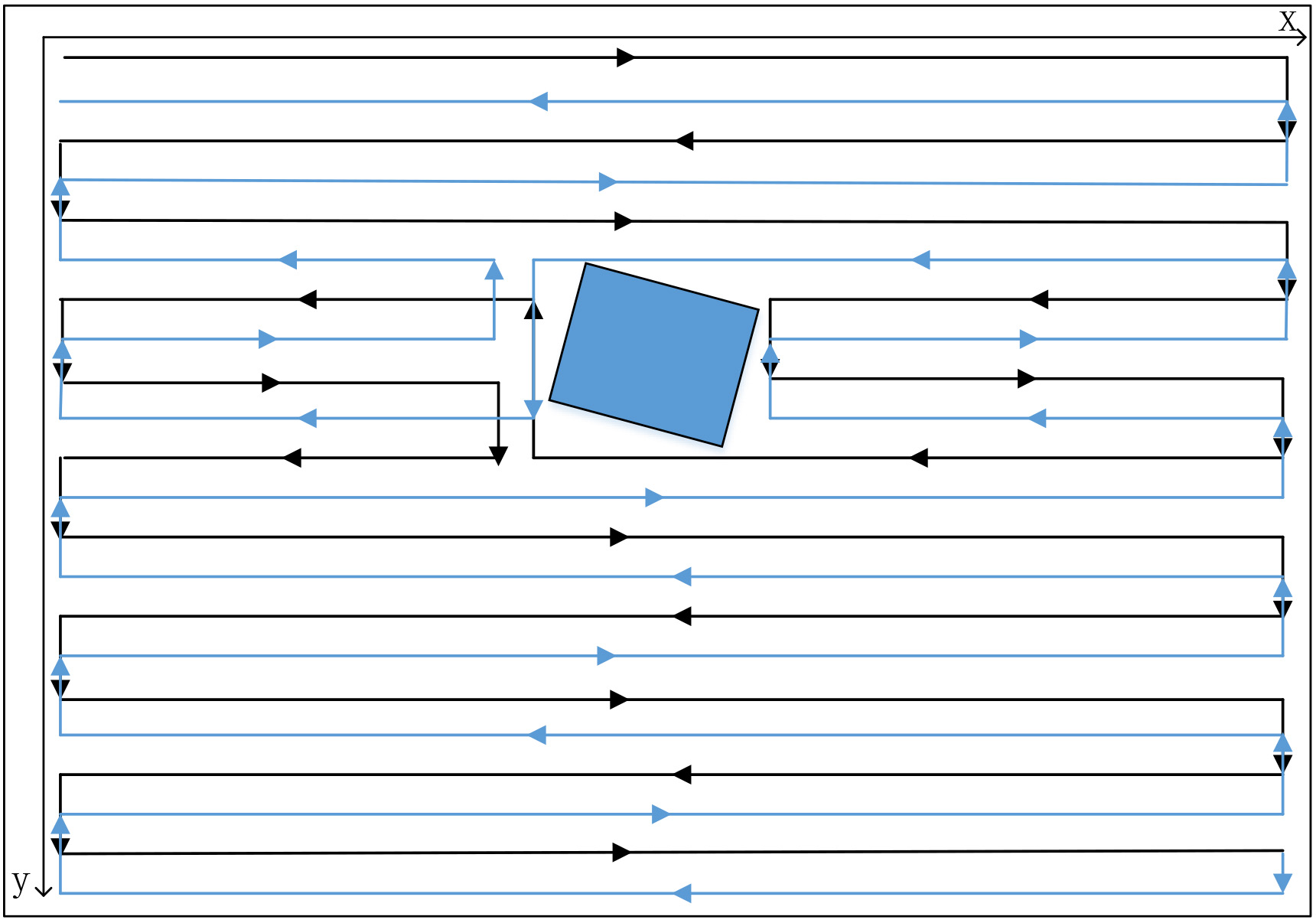
Control system model of massage robot.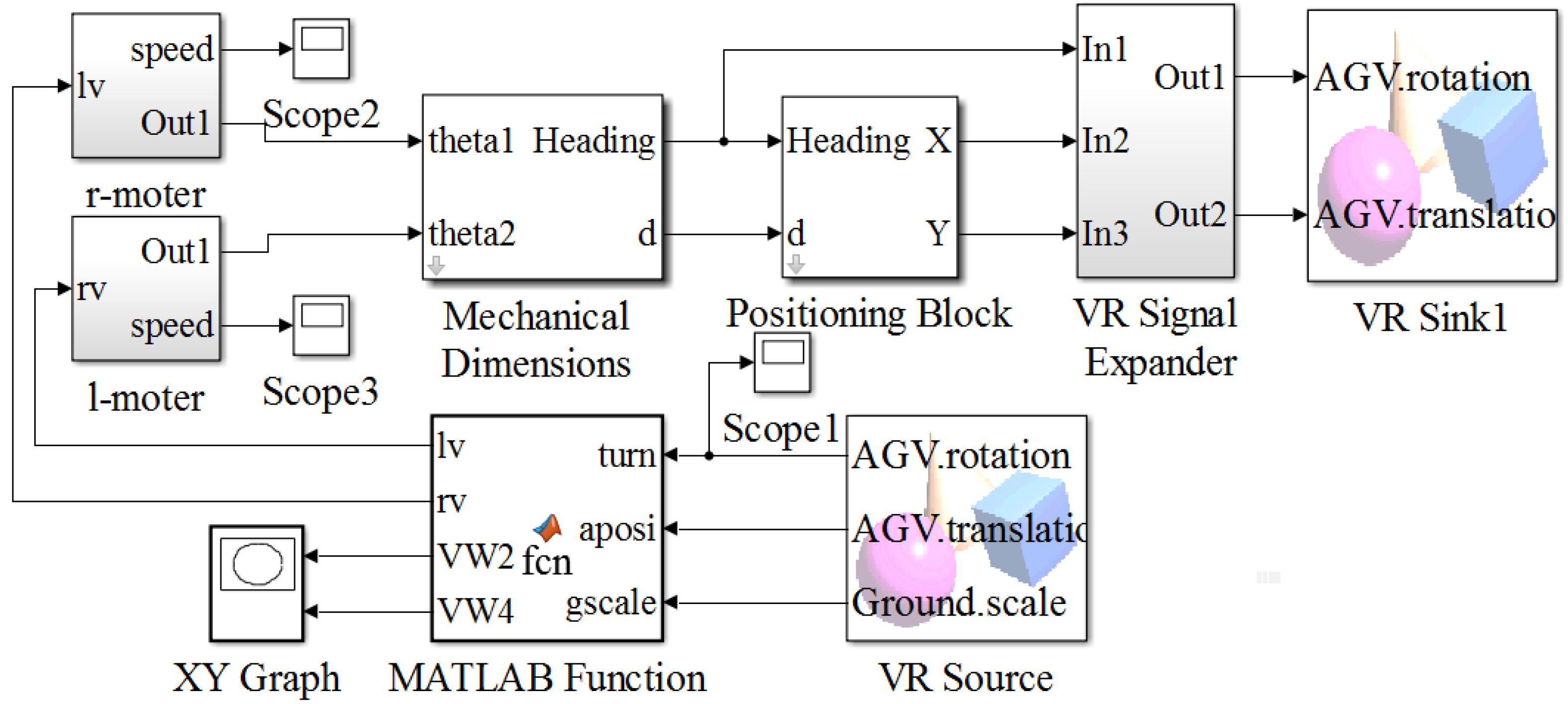
Relationship between the electromagnetic force and the displacement of the moving iron core.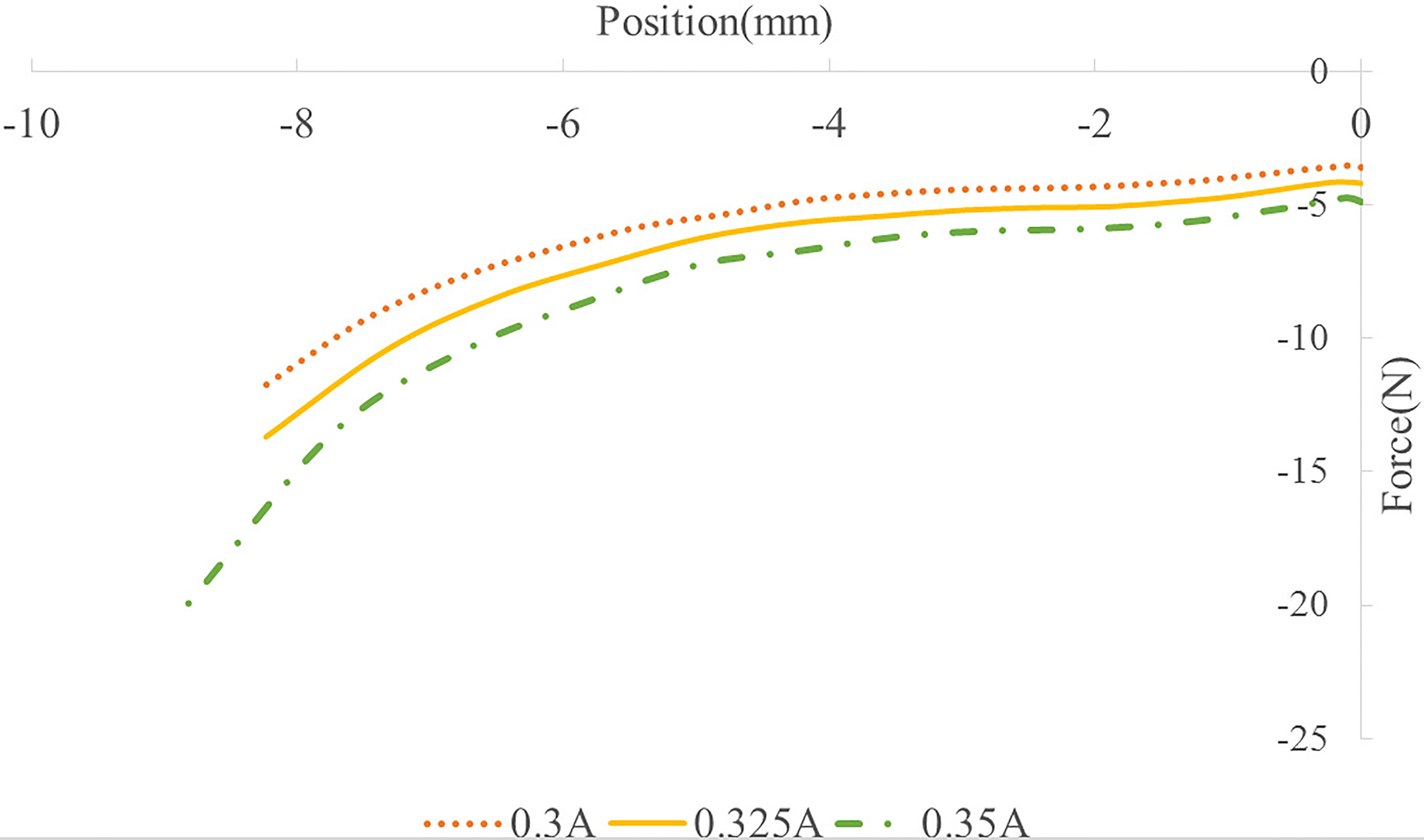
Vector distributions of magnetic induction B of the moving iron core at different time.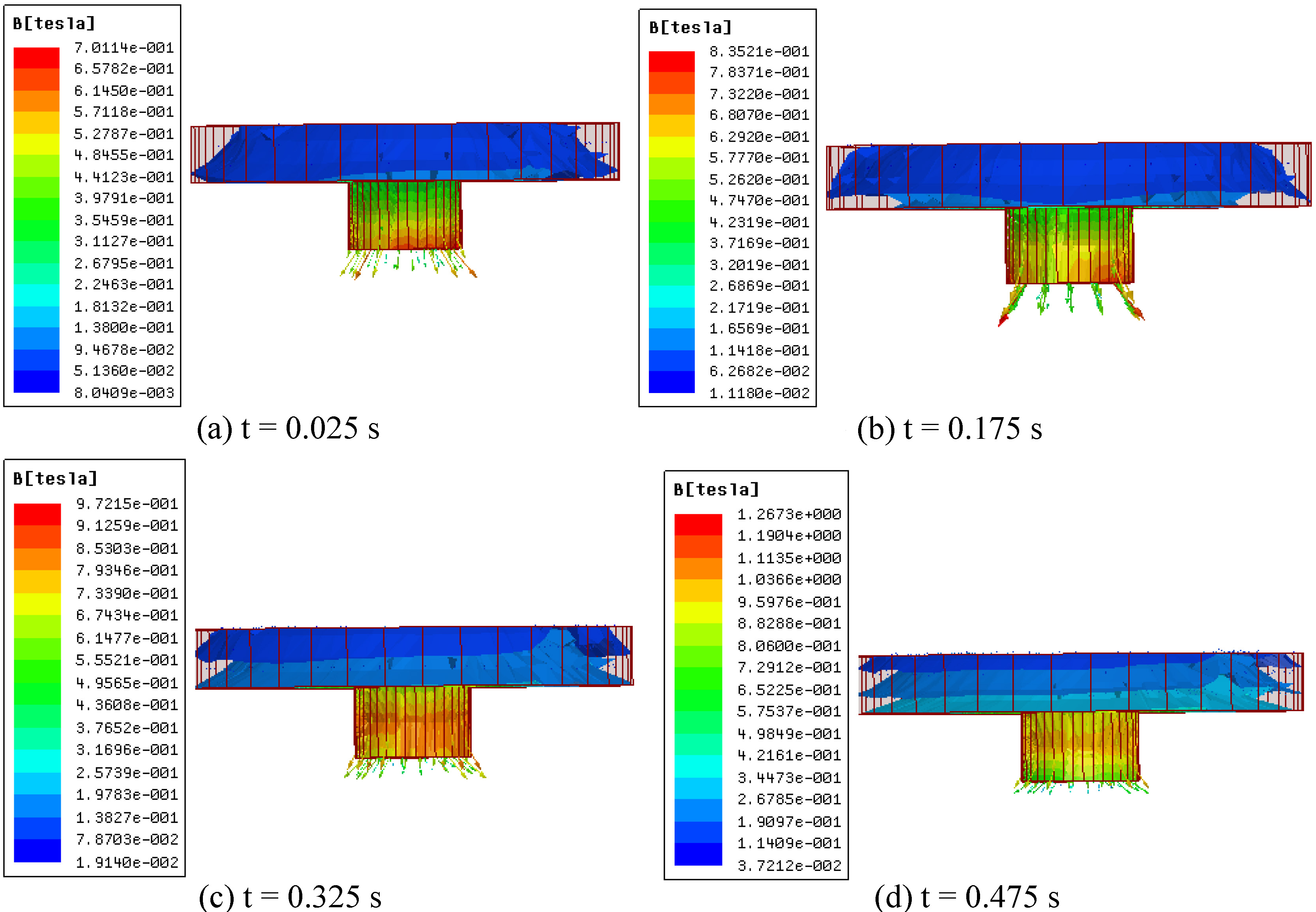
Relationship between velocity and displacement of the moving iron core.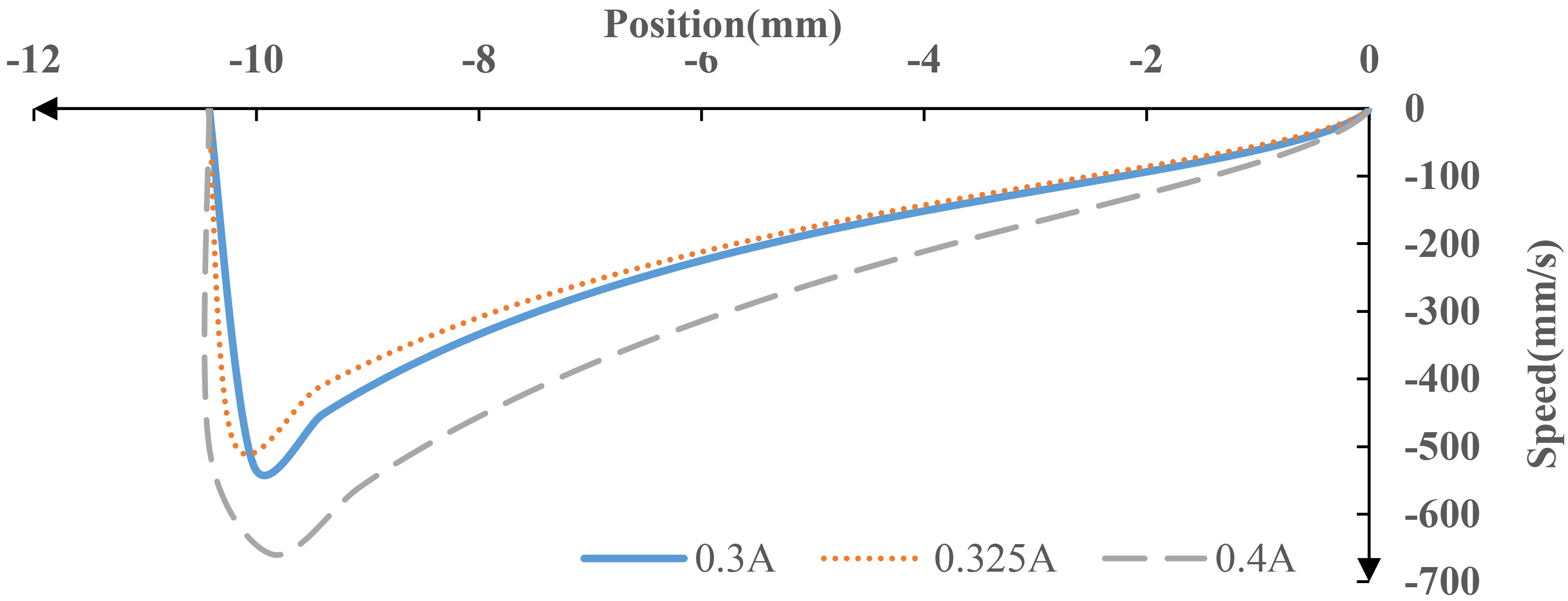
Visual interface of massage robot movement.
Comparison before and after improving of tapping path.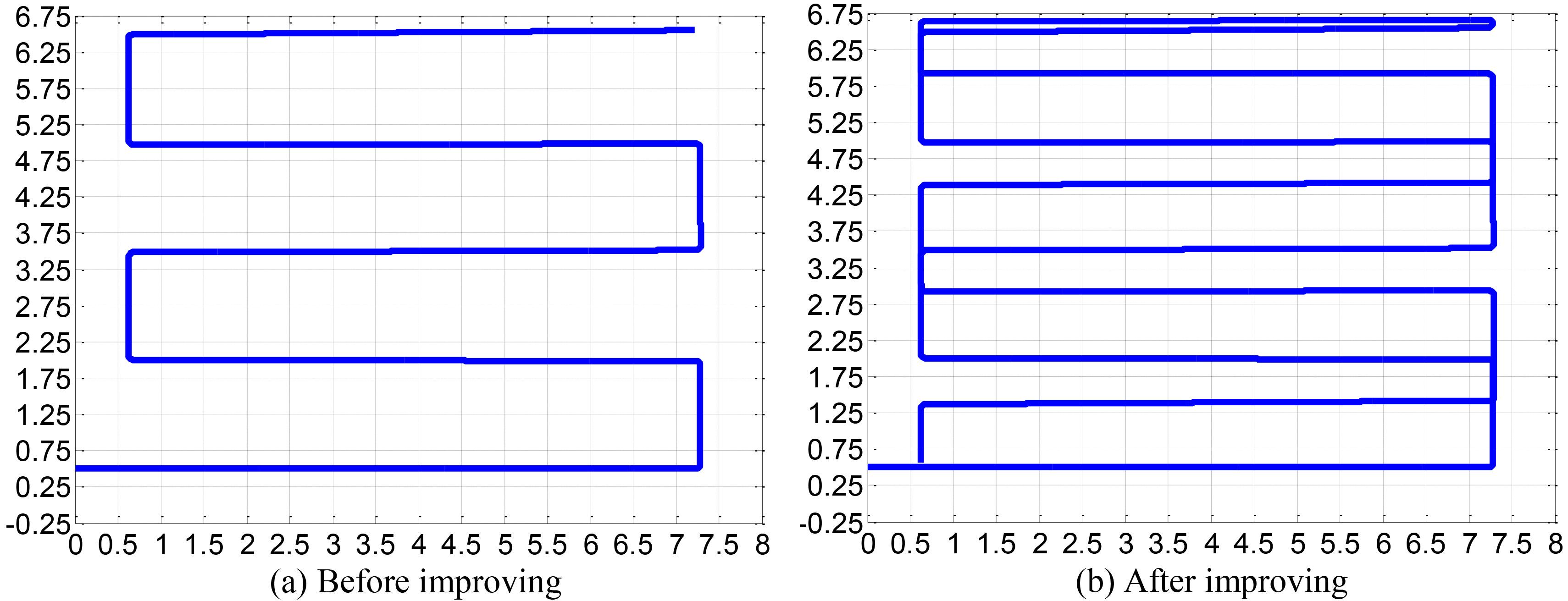
Comparison before and after improving of rolling/kneading path.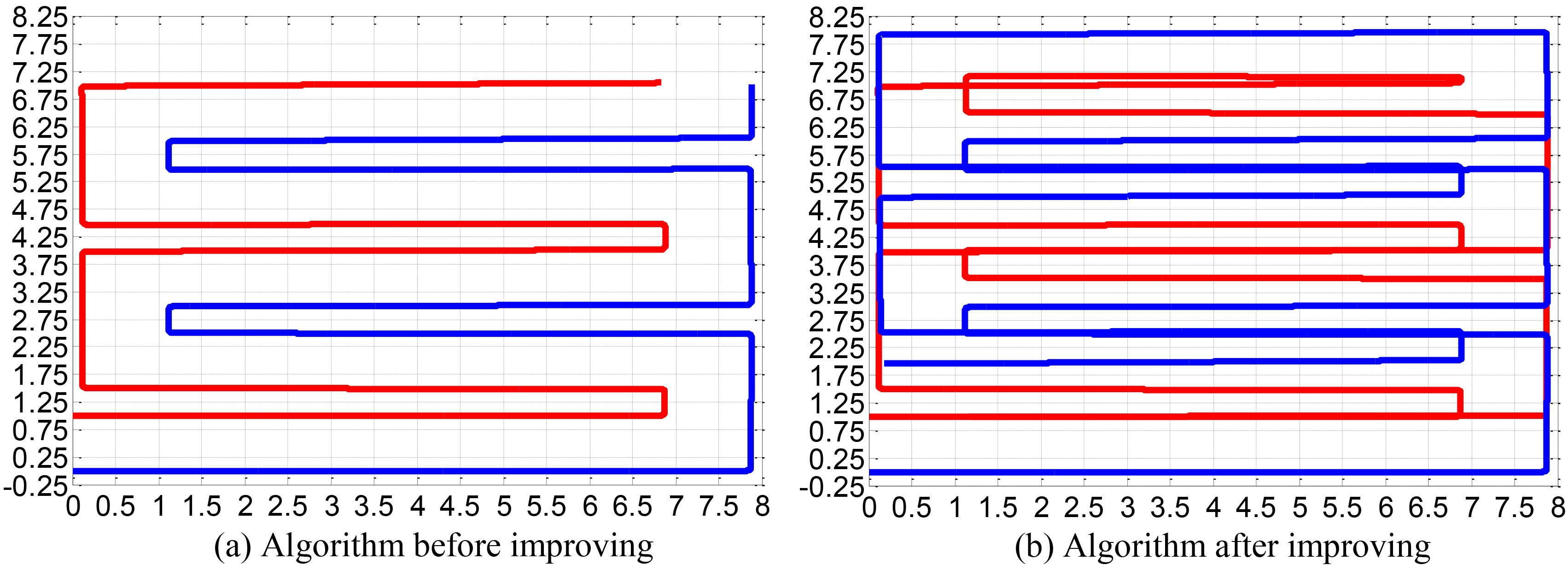
This paper established the control system model of the wheeled massage robot based on Simulink (see Fig. 4), it includes control subsystem of the motor, path algorithm control subsystem, parameter module of the massage robot and virtual reality interface module. The control signal is directly outputted to a virtual operating environment by virtual reality (VR) Sink block, and the operation of the massage robot could be observed through a browser window.
Results
Structure optimism of massage head
Considering factors like massage comfort and electromagnetic force, the distance between moving iron core and the yoke was chosen as 12 mm. the massage percussion depth is about 4 mm according to TCM massage and the maximum movement stroke of the moving iron core is 8 mm. Considering factors like the size of the yoke and coil diameter, the number of coil turns was chosen as 2100. The relationship between the electromagnetic force and displacement of moving iron core under the current of 0.3 A, 0.325 A, 0.35 A are given in Fig. 5. It shows that massage force varies from 10 N to 20 N. Tapping intensity usually varies between 10 N and 30 N according to TCM massage theory. It indicates that all the chosen current values satisfy the requirements.
When the coil current is 0.35 A, the vector distributions of magnetic flux density B of the moving iron core are illustrated in Fig. 6. It indicates that the distance between the moving iron core and the yoke gradually reduces with time but the magnetic flux density gradually increases.
Control of massage intensity
From the simulation results, it can be inferred that the coil current is the most important factor which affects massage intensity based on orthogonal experiment. Compared to other factors, the coil current is more flexible to control the massage intensity. The relationship between velocity and displacement of the moving iron core with the coil current 0.3 A, 0.35 A and 0.4 A are illustrated in Fig. 7. The electromagnetic forces are between 10
Simulation of path planning
The actual movement of the massage robot in virtual operating environment can be observed after completing the above modeling work (see Fig. 8). The simulation results of the proposed algorithm before and after improving tapping path are presented in Fig. 9. It can be calculated that the coverage rate is only 35.27% by using the traditional reciprocating path planning algorithm, while the coverage rate reaches up to 60.27% with the improved reciprocating path planning algorithm.
For rolling/kneading path, the corresponding results are shown in Fig. 10. It can be seen that the coverage rate is only 58.82% using the traditional reciprocating path planning algorithm as shown in Fig. 10a, it is improved to 84.93% using the improved reciprocating path planning algorithm as shown in Fig. 10b.
Discussion
It’s very difficult for the current massage devices to give friendly interaction to people, especially the aged. A massage robot could reproduce the expert operations with individualized manipulation parameters and enhanced safety control strategies. Thereby, our team made efforts to provide a portable massage robot with tapping, rolling and kneading operations [14]. In order to promote the experience and skills of experts and reduce labor intensity during massage, massage robotic systems were proposed to perform massage operations instead of experts. However, most of the existing massage devices could complete restricted operation and the whole massage process was not completely considered. By comparison, the massage robot presented in our work could perform three kinds of operations. Nevertheless, the treatment effect of the massage robot needs to be assessed clinically, and the structure may be improved to provide more operations.
With the above analysis, it is known that the practical moving area of massage robot is not the effective massage area. Therefore, this paper took the right wheel of massage robot as the analysis objects and respectively used reciprocating path planning algorithm and the improved reciprocating path planning algorithm to simulate massage path. The simulation results are presented in Section 4. The coverage rate was calculated as: Coverage rate
The simulation results of the proposed improved algorithm were compared to the traditional algorithm with tapping and rolling/kneading path. To further study the improvement and the feasibility of the proposed algorithm, the Angle-Time and Speed-Time results were obtained, and the flexibility of the wheels has be proven. The control strategy of the whole system would be optimized for the balance and stability in the future work.
Conclusions
This paper proposed the improved reciprocating path planning algorithm for the autonomous mobile massage robot which was designed based on the principle of electromagnetic induction, and established the control system model by using Matlab/Simulink platform. The influence caused by coil current, coil turns and the distance between the moving iron core and the yoke on massage intensity were figured out with a simplified model. The coil current was found to be the most important factor on electromagnetic force by orthogonal experimental method. According to the simulation results and the experience of massage operations, the number of turns and the distance between the moving iron core and the yoke were determined prior to coil current to optimize the structure parameters of massage head, and it is feasible to control the massage intensity by adjusting the value of coil current. Furthermore, the traditional and improved reciprocating path planning algorithm were simulated and analyzed for three different massage operations. It can be concluded that the proposed algorithm is suitable for massage environment without the need of establishing unknown environmental model, the control tests also show that the proposed algorithm can effectively improve coverage rate, and the massage effect accordingly gets improved.
Conflict of interest
None to report.
Footnotes
Acknowledgments
This work is supported by National Natural Science Foundation of China (Grant No. 51605385) and Fundamental Research Funds for the Central Universities (Grant No. 3102017zy008).