
Abstract
BACKGROUND:
Vision impairments affect the ability to navigate environments and gain spatial perception of one’s surroundings. Existing navigation aids typically provide close-range information, but not feedback on farther distances (i.e., beyond 5 m from the user).
OBJECTIVE:
To address this gap, the OptiBand, a custom assistive device, was previously designed with a stakeholder who is blind. The OptiBand uses Lidar sensing and haptic feedback to relay information on objects up to 15 m away. In this paper, we sought to evaluate the efficacy of the OptiBand with an in situ user study.
METHODS:
RESULTS:
The OptiBand tended to yield lower workload requirements and similar trust levels compared to existing navigation aids. Interview data demonstrated the usefulness of the OptiBand in selected day-to-day tasks such as navigating outdoors and maintaining appropriate interpersonal spacing.
CONCLUSIONS:
This work provides evidence on benefits of and potential uses of assistive navigation aids like the OptiBand. Researchers interested in similar devices can benefit from our efforts.
Introduction
As of 2022, approximately 12 million people are affected by vision impairments in the United States, and one million people are legally blind [1]. For many of these individuals, spatial perception (or the ability to construct mental maps of one’s environment [2]) is challenging due to its dependence on knowledge of distant objects and points of reference. While sight is a common way to achieve this type of scene perception, spatial awareness can be successfully gained by the use of auditory or tactual senses [3]. Haptic devices such as the Sunu Band [4] and Miniguide [5] have begun to fill this need for individuals with vision disabilities, but current assistive devices for this purpose are typically limited to sensing within 5 m of a user. In our research, we have begun to investigate ways to support farther-range scene perception with the OptiBand, a new assistive device. Within this paper, we present an in situ evaluation of the OptiBand by nine users with vision disabilities.
An early OptiBand user leverages a handheld version of the device in parallel with a white cane to understand the surrounding environment.
Past and present spatial perception aids range from passive to actuated and close- to far-sensing. The white cane, one of the most popular spatial perception aids, provides haptic feedback for up to 1 m radially from the user. Electronic navigation aids such as white cane attachments, e-canes, handheld devices, and wearable devices typically provide feedback on the scene up to 5 m from the user [6, 7, 8, 9, 10, 11, 12, 13, 14, 4, 15, 16, 5], although at least one past example used Lidar to achieve up to 6 m of sensing [17]. Most of the above devices focus on obstacle avoidance, but some past wearable systems, such as headwear or belts, have supported spatial perception for a shorter sensing range compared to the OptiBand [18, 19]. Based on a request from a blind stakeholder, the OptiBand was designed in past work in the haptics community [20]. This device combines past advantages of navigation and spatial perception aids with a longer-range view by using a Lidar sensor to detect objects up to 15 m away from the user and provides corresponding haptic feedback using a designated mapping. Figure 1 shows an example real-world use case of the device, in which a white cane supports sensing nearby features and the OptiBand helps with an understanding of farther-away environmental features. Our past work elaborated on the testing of several methods to map distance to vibrations [20], as well as the results of in-lab studies proving the ability of the OptiBand to reliably detect objects up to 15 m away [21]. However, the in-lab studies were conducted with blindfolded sighted individuals, so more work is needed to capably represent how end users might generally value and experience the system. The present paper centers on a longer-term exploratory study of the OptiBand with more users who are blind.
In situ studies of spatial perception aids
The extensive body of past research on navigation aids has led to many compelling proposed solutions. However, the evaluation of these solutions is commonly performed without individuals with visual impairments in the loop. Past work in related fields has shown that testing without blind or visually impaired users can lead to a misrepresentation of device performance, as well as a lack of understanding how the device could be incorporated with other feedback that the user receives [22]. Studies that do involve populations with visual impairments are often conducted with small numbers of users (e.g., [20, 23]) or controlled, indoor, and/or short-term scenarios (e.g., [24, 25, 26, 27, 28]). For example, a haptic belt-based sensory augmentation aid was tested with a single user over a long period of time [23]. In situ studies for audio feedback-based indoor navigation aids occurred in short-term, fixed-environment trials with blind or low-vision individuals [24, 25, 26, 27]. Selected work on haptic belts for navigation assistance have also considered the experiences of individuals with visual impairments in controlled, indoor settings [29, 19]. To our knowledge, the teams that worked on closely-related current commercial haptic devices, such as the aformenetioned Sunu Band and Miniguide, in addition to Buzz Clip [30] and Maptic [31], have not published peer-reviewed research on in situ studies of these devices. To fill in current gaps in haptic navigation aid understanding, we build off of in situ evaluation principles like those provided by [32] to understand the applicability of haptic navigation aids for spatial perception in day-to-day use, particularly in both indoor and outdoor settings, in real-life applications, and with multiple blind users.
Present work
In this paper, our key research goals were to understand the relevance and usefulness of the OptiBand in day-to-day use cases, in addition to any advantages offered by the long range of the OptiBand. We present the methods of our exploratory study, including details on the current OptiBand design, in Section 2. The results of our in situ evaluations in Section 3 help us to understand current advantages and design iteration needs of the OptiBand. We discuss key findings, strengths, limitations, and design implications of this work in Section 4. Main contributions of these efforts include an improved understanding of the role of far-range spatial perception devices in the day-to-day lives of individuals with vision disabilities, in addition to insights on further design criteria for the OptiBand and other similar systems. Although our sample size is relatively small, we anticipate that this work can support hypothesis generation for future studies on related topics.
Methods
To evaluate prospective users’ day-to-day experiences with the OptiBand, such as usability in their environment, prospect of integration with current navigation aids, and trust in the device, we performed a three-month-long in situ deployment, as further described below. This study was approved by our university ethics board.
OptiBand system details
Here, we describe the system components, form factors, haptic feedback mappings, and sensing range modes used in the in situ deployment.
The three current OptiBand prototypes available for deployment in the exploratory study. Top Left: The camera form factor. Top Right: The watch form factor. Bottom: The remote form factor.
The design requirements of the OptiBand were informed from prior work with a blind stakeholder [20]. To meet requirements defined in that past work (namely, a haptic feedback modality and far-range sensing abilities), the previously selected system components centered on an Adafruit vibrating mini motor disc [33] to deliver feedback to the user and the Garmin Lidar Lite v3 to sense distant objects up to 15 m away. The vibrating motor was powered by a minimum of 2V and maximum of 5V consistently across Optiband operation modes. A Teensy 3.2 microcontroller handled processing to convert sensed distances to vibration output, as further described below. Additional system components included a custom printed circuit board (PCB), push-button, and switch. The system was enclosed in a 3D-printed PLA case. In our current rendition of the OptiBand, these casings comprised three form factors: the camera (digital camera-like and handheld), watch (wrist-mounted with a protruding wire for the push-button), and remote (remote control-shaped and handheld), as shown in Fig. 2. The form factors arose from early discussions and testing with a blind stakeholder. It is important to note that the OptiBand is meant to be used in conjunction with a cane or other complementary navigation aids, not as a replacement.
The results of a past in-lab study on methods for haptic feedback mappings to connect sensed distance to outputted vibration showed a slight preference for the stepped mapping method, as further described below, over linear and curved mapping alternatives [20]. Accordingly, the stepped mapping and similar inverted stepped mapping were chosen as appropriate mapping methods in our in situ OptiBand deployment. The mapping method details follow:
Stepped Mapping: the total range of the device is divided into eight equal zones or steps. Each step relates to one vibration frequency inversely proportional to measured distance using the following function:
Inverted Stepped Mapping: this mapping is an inverted version of the stepped mapping using the following function:
Each of these mapping methods was matched with one of the sensor ranges detailed below. This design decision arose from the early informal observation that users were unable to use the same mode to both locate and approach objects; the far-range information became confusing as the destination of interest neared. In order to give users the ability to both perceive far-range environmental features and approach close-range objects with confidence, two separate sensing range modes were defined:
Short-Range Mode: relays sensed information to the user about the surroundings 0.5–3 m away, using the stepped mapping. Hence, a user feels stronger vibrations as they approach a nearby object.
Long-Range Mode: relays sensed information to the user about the surroundings 2.8–15 m away, using the inverted stepped mapping. Hence, while scanning the surroundings, the user feels the strongest vibrations for objects that are 15 m away.
This design provided users with the ability to toggle between short- and long-range modes according to their needs. The device defaulted to the short-range mode when turned on, and users could activate the long-range mode by holding down the device’s push-button.
We designed the study procedure with our original stakeholder in the loop; we asked for his feedback on how to balance the collection of sufficient data with the avoidance of being overly intrusive to participants.
At the start of the study, participants provided informed consent and completed an initial call with a research team member for onboarding and baseline data collection. During this call, we gathered demographic information, briefed participants on the OptiBand and its form factors, gathered the participants’ form factor selection, and conducted a baseline semi-structured interview, the contents of which are further described in Section 2.3. The interview questions included a prompt to select three activities or scenarios in which participants desired more far-range spatial information, the ability to approach objects more confidently, or the ability to locate objects of interest in the surroundings; participants were informed that we would ask for specific experiences related to these activities during future calls. Next, participants verbally answered the survey questions detailed in Section 2.3, with the context of current (baseline) navigation aid experiences and spatial perception abilities.
Next, the research team shipped the OptiBand, charger, and use instructions to each participant. We contacted participants upon the device delivery to check that it was functioning properly and supply a reminder of the selected use scenarios.
The three-month study period began at this point, and participants completed check-in calls with us after each month of experience using the OptiBand (i.e., one, two, and three months after the delivery of the OptiBand, respectively). During these calls, we conducted semi-structured interviews about experiences with the OptiBand to date, as further described in Section 2.3. We verbally administered the same survey as in the onboarding call, this time with the context of the OptiBand and general spatial perception abilities. As also alluded to above, during these check-in calls, we specifically asked about experiences trying out the three planned activities/scenarios from the initial call.
The third check-in call marked the end of the three-month-long study period. Participants received $100 US and were able to keep their OptiBand if desired.
Measurement
We collected demographic information, semi-structured interview input, and self-reported quantitative data over the course of the exploratory study.
The demographic information included basic background information such as gender, age, and prior navigation aid use.
Semi-structured interview data was collected during each call with the participants. The initial call questions included the baseline data collection related to current navigation aids used, how participants usually interpret feedback from the white cane, how this model changes in outdoor spaces, general navigation strategies used, and what use scenarios the participant envisioned for the OptiBand. The subsequent monthly check-in call questions aimed to capture general experiences with the OptiBand, information about experiences with the OptiBand in the selected use scenarios, whether the OptiBand seemed to enhance success in these scenarios, amount of time spent using the OptiBand, changes in OptiBand experience from the past month to the current month, and differences between experiences with the OptiBand vs. other navigation aids.
Self-report responses to the following survey questions were also verbally collected during each call.
NASA Task Load Index (TLX) [34]: captured the workload experience of using the system for spatial perception on a 10-pt scale. We used all subscales other than temporal demand, as the other five scales (i.e., mental demand, physical demand, performance, effort, and frustration level) seemed most relevant.
Measuring Human-Computer Trust (HC Trust)[35]: captured feelings of reliability, competence, understandability, faith, and attachment to the system on a 7-pt Likert-type scale from Strongly Disagree (1) to Strongly Agree (7). Each scale included the standard five questions from this inventory.
During the initial call, we asked participants to think about the context of existing (baseline) navigation aids, while check-in call responses centered on the context of OptiBand use along with existing aids.
A total of 10 people were recruited for the study. One participant was unable to complete the study due to a prolonged illness; their partial data is omitted from the demographic information below and from the analysis presented later. Of the participants who completed the study, eight were blind and one had low vision. The eight blind participants had experienced blindness for the majority of their life, typically either congenitally or from a very young age. The two male and seven female participants ranged from 42 to 69 years of age (
Analysis
Survey responses were analysed with Friedman tests that compared responses between baseline calls and each of the three check-in calls. In the case of significant main effects, we checked for significant pairwise differences using Durbin-Conover tests. These tests used an
Since the participant group was small and individual experiences are important to understanding the role of assistive devices in day-to-day settings, we additionally examined general trending and within-participant trends for the administered surveys. A thematic analysis [36] was conducted for the semi-structured interview data to help us understand participant use behaviors, general experiences with the OptiBand, and perceptions of each device mode.
Results
Nine participants successfully completed the full study. On an average, participants reported using the device three times per week, for a mean duration of one hour during each use instance. Participants used the OptiBand in both indoor and outdoor settings; popular uses included exploring neighborhoods, navigating backyards, and finding furniture at home. The following subsections detail key survey and semi-structured interview results, including further details about time spent using the OptiBand and experiences related to the selected use applications.
Survey results
We used ratings from the NASA TLX and HC Trust surveys to evaluate the performance of the OptiBand over time and compare the experience with this new assistive device vs. participants’ other navigation aids. rANOVA tests comparing survey ratings across the four administrations of the survey (baseline and month 1–3 check-in calls) yielded main effects for physical demand (
NASA TLX ratings from each study call. In this and later similar figures, boxplots include boxes from the 25th to the 75th percentiles, gray lines for medians, purple diamonds for means, whiskers up to 1.5 times the inter-quartile range, and “+” marks to indicate outliers. Brackets indicate significant pairwise differences.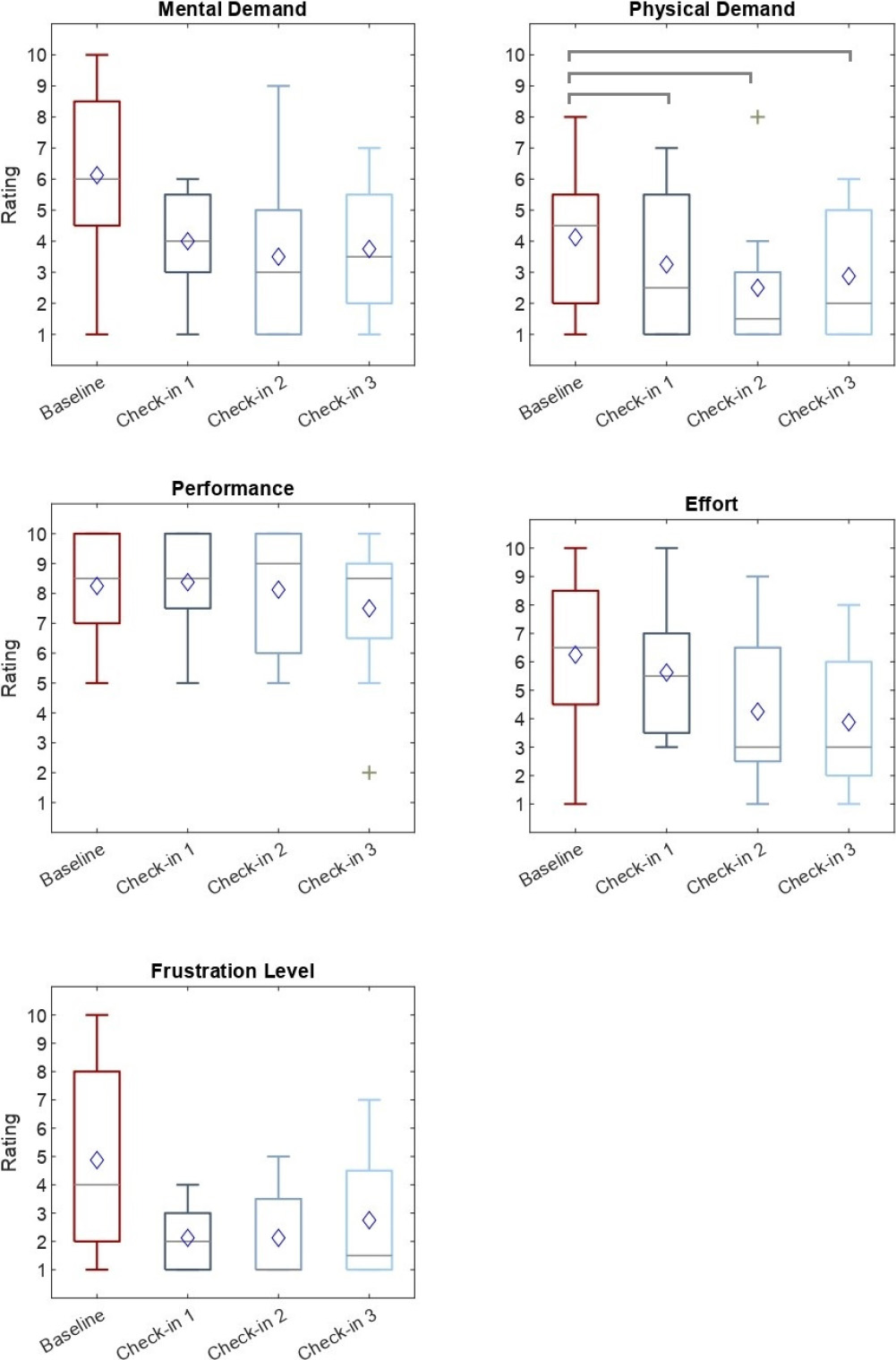
HC Trust ratings from each study call.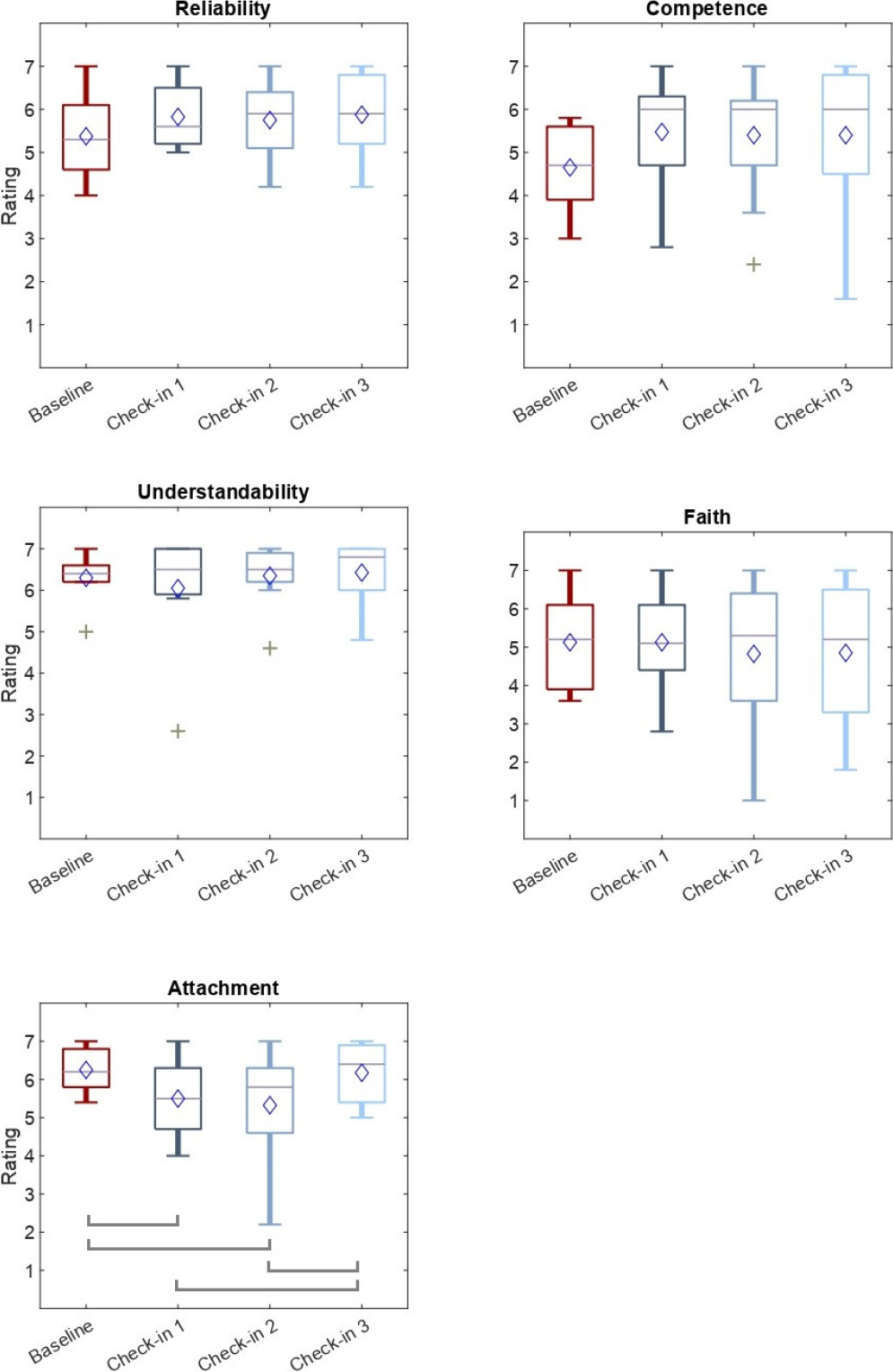
Beginning Rating Levels: Beginning-of-study ratings of participants’ existing assistive navigation aids showed a relatively high effort level requirement and relatively high comfort with these devices. Specifically, mean ratings for the baseline TLX questions about spatial perception ability with current navigation aids (with a maximum rating of 10) were 6.00 for mental demand, 4.22 for physical demand, 8.44 for performance, 6.22 for effort, and 4.66 for frustration level; associated distributions are visible in Fig. 3. Beginning average ratings for HC Trust (maximum rating of 7) showed relatively high comfort and confidence in current assistive devices; average ratings were 5.51 for reliability, 4.82 for competence, 6.37 for understandability, 5.20 for faith, and 6.33 for attachment (see Fig. 4).
The NASA TLX survey, whose questions highlighted spatial perception ease with either existing devices (during the baseline) or the OptiBand plus current aids (in subsequent calls), showed overall trends toward lower workload over the study period, although statistically significant results were present for only one of the scales. Participants tended to rate mental demand as lower for all check-in calls, compared to the baseline ratings. On a participant-wise level, all participants but two found the addition of the OptiBand to lead to lower or equal mental demand across all check-in calls. We observed a tendency for physical demand to reduce for all check-in calls, compared to the baseline. For this scale, we observed a corresponding significant main effect, as well as significant pairwise comparisons between the baseline and all other calls. Participant-specific trends reflected the same tendency; for all participants but one, physical demand ratings were lower than or equal to baseline reports during all check-in calls. Performance ratings remained similar across the full course of the study. By a smaller margin than in other NASA TLX ratings, reports of performance during the final check-in call were lower than other assessments. Participants tended to rate effort as decreasing across the study calls. On a participant-wise level, all but three participants had lower or equal ratings of effort for all check-in calls, compared to baseline reports. Lastly, although frustration level ratings did not yield any significant main effects, the mean ratings for check-in calls tended to be much lower than for the baseline. For five participants, frustration was always lower with the OptiBand, one participant gave similar ratings for both scenarios, and three participants experienced higher frustration with the OptiBand.
HC trust trends
The HC Trust scales, whose questions highlighted connection feelings with either existing devices (during the baseline) or the OptiBand plus current aids (in subsequent calls) showed overall high trust levels of current devices, as well as typically comparable ratings of experiences with the OptiBand. Reliability ratings tended to remain consistent across the whole study, both within and between participants. Competence ratings across the calls were similar, although there was a slight tendency for the check-in call reports to yield higher ratings, and the mean rating increased over time. We observed that understandability ratings were similar across the study. The lowest single rating was during check-in call 1, which may show that particularly for that user, the OptiBand required a steeper learning curve. Faith ratings were similar across the whole study. On an individual rating level, it seemed that some participants were comfortable with their current devices and always rated faith in the OptiBand as lower (
Semi-structured interview results
Since individual participant experiences and OptiBand use strategies varied, we considered it important to assess similarities and differences across the semi-structured interview data to understand potential use cases and next steps for the system. Based on the corresponding thematic analysis, we present a digest of qualitative participant experiences below.
Participant background experiences, use scenarios, and usage levels
Time spent and reported self-ratings of success using the OptiBand per month. The usage time plot follows the same conventions as the other boxplots in this paper, and the success rate plot is a stacked bar graph showing how many participants selected each success rating category.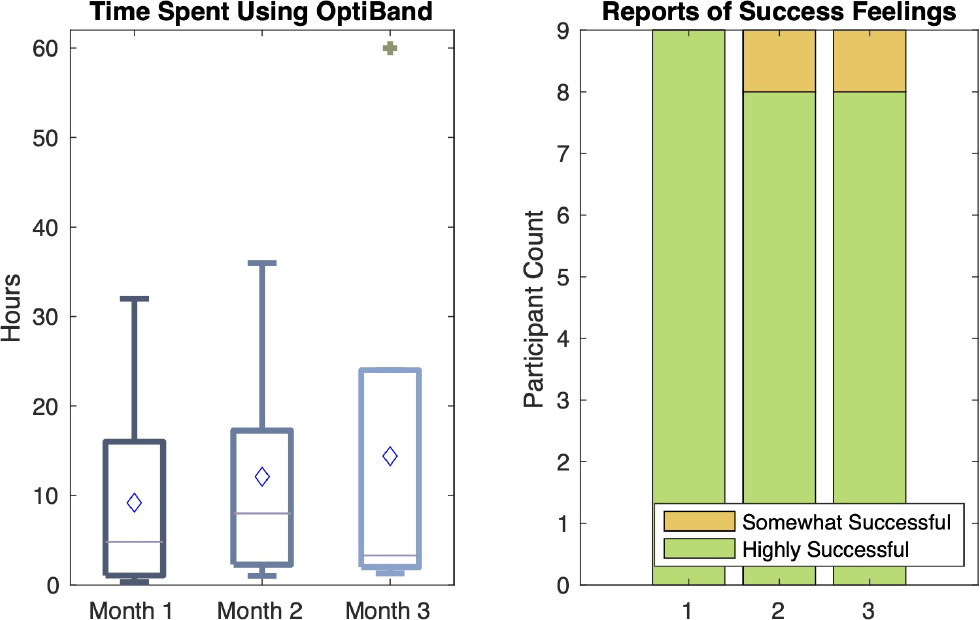
All participants reported using a white cane as their primary navigation aid. Common reported strategies for using the cane included sweeping to find textural differences (
Participants all commented that the OptiBand was generally easy to use, and seven participants described the device’s feedback as being easy to interpret; for example, one participants described the device as being “real intuitive.” Example anecdotes about success using the OptiBand included one participant’s comment that “using it in the garden, I like the way it gives me information” and another person’s comment that “it [(the OptiBand)] gave me a point of reference” for successfully approaching a detached garage on a snowy day that impeded information usually collected via cane. Participants expressed a strong liking toward the haptic feedback modality of the device (
Short-range mode observations
Overall, the short-range mode was described as more reliable than the long-range mode feedback. Positive comments about the short-range mode included reflections on added depth perception when approaching an object (
Long-range mode observations
Overall, all participants commented that the long-range mode was able to provide feedback for very distant objects, but expressed less confidence in this mode. The main advantage of this mode seemed to be the ability to locate and approach objects from a much longer distance, as mentioned by three participants; for example, one user noted that they could successfully “approach objects [in unfamiliar locations] from a ways off.” However, three participants also noted finding it harder to focus in on objects in the long-range mode. One participant compared the long-range mode to “the end of a 50ft-long stick,” which they found to feel “imprecise.” Another participant noted the challenge of using the long-range mode during testing, as they simply were “not as curious about what is 50ft away.” Three users liked the idea of the long-range mode for purposes such as telling “how far the construction goes down the street” to understand whether an entire city block is closed off and how to navigate accordingly. One participant even wanted an extended sensing range of up to 30 m. Two participants wished that the long-range mode reached approximately half the current distance, since 15 m of reach simply felt like it yielded too much information.
Discussion
In this paper, we sought to evaluate the helpfulness of the OptiBand in everyday applications, in addition to understanding the usefulness of the long-range OptiBand mode. The results of our exploratory study, which can serve to inform hypothesis generation and device design in future related work, showed that spatial perception-related workload tended to be lower with the OptiBand, while trust feelings were similar between the OptiBand and participants’ existing navigation aid devices. Mental demand and frustration ratings suggested that the OptiBand was overall easy to grasp and lowered the thinking required and frustration experienced during spatial perception tasks right away. Physical demand and effort likewise tended to decrease over time, with some suggestion that there was an initial learning curve. The ongoing OptiBand use, perceptions of success with the OptiBand, and relatively stable ratings over the period of OptiBand use are all positive signs for the potential applicability of the OptiBand to day-to-day lives of individuals with vision disabilities. On the other hand, shorter-range use cases seemed to yield more success than long-range applications. Strategies such as holding the OptiBand at the right location and angle took time to develop; sharing of tips on past use cases and successful approaches with new users may help to expedite this learning process.
Strengths of this work include the in situ testing setting and device evaluation with representative end users of the OptiBand. The ecologically valid setting of the exploratory study provides richer insights on individual preferences, environmental variables, and relevant use cases than we could collect from a controlled in-lab effort. Further, the OptiBand seemed to lower workload related to spatial perception and proved useful in the views of all test users. On the other hand, complementary limitations arise due to the real-world nature of the work. We were only able to recruit a small sample size during the presented long and in situ study, and data we were able to collect from participants was limited by what we could request without an undue impediment to their day-to-day lives. Overall, this setup limited our ability to draw statistically significant conclusions and the amount of objective data we could gather from the study. In the future, we could use a mix of in-lab and real-world efforts to gain multiple useful perspectives (and types of data) related to the OptiBand’s usefulness, strengths, and weaknesses. We also note the likely importance of comparing the experiences of individuals with and without congenital blindness (as supported by past work such as [37]); we did not record information about congenital blindness in our effort, but we encourage others to do so in related future work.
This paper establishes the need to conduct further in situ investigations of the OptiBand and other navigation aids for spatial perception support. Short-range information from this type of device appears to be helpful, but more work remains to support the statistically significant gains offered by this sensory augmentation. Long-range spatial perception information appears to be useful in selected scenarios (such as approaching a distant shed), but the appropriate range and mapping for this information remains an open question for further investigation. In future work, we aim to conduct more evaluations of the OptiBand in varied settings, as well as to design and evaluate updated ranges and mapping methods for better performance of the long-range spatial perception support specifically. We believe that the in situ methods in this work and ecologically valid accounts of how the OptiBand was used in beneficial ways can advance the design of future spatial perception aids for individuals with vision disabilities.
Author contributions
The authors contributed to the following aspects of the work in the ways delineated below.
CONCEPTION: Anisha Bontula, Rafael Morales Mayoral, Naomi T. Fitter.
PERFORMANCE OF WORK: Anisha Bontula, Rafael Morales Mayoral.
INTERPRETATION OR ANALYSIS OF DATA: Anisha Bontula, Jai’La Lee Crider, Naomi T. Fitter.
PREPARATION OF THE MANUSCRIPT: Anisha Bontula, Jai’La Lee Crider, Naomi T. Fitter.
REVISION FOR IMPORTANT INTELLECTUAL CONTENT: Anisha Bontula, Naomi T. Fitter.
SUPERVISION: Naomi T. Fitter.
Ethical considerations
This work was approved by the Oregon State University Institutional Review Board under protocol #IRB-2019-0656. Informed consent was collected from all study participants.
Footnotes
Acknowledgments
We thank Ryan Quick and Dave Plassman for early contributions to this project, and the Oregon State University Advantage Accelerator for their support of this work through an Innovation Day Award and Accelerator Innovation Development (AID) Fund Award.
Conflict of interest
The authors have no conflicts of interest to report.