
Abstract
Predicting the landslide-prone area is critical for various applications, including emergency response, land planning, and disaster mitigation. There needs to be a thorough landslide inventory in current studies and appropriate sampling uncertainty issues. Landslide risk mapping has expanded significantly as machine learning techniques have developed. However, one of the primary issues in Landslide Prediction is data imbalance (DI). This is problematic since it is challenging or expensive to generate an accurate inventory map of landslides based on previous data. This study proposes a novel landslide prediction method using Generative Adversarial Networks (GAN) for generating the synthetic data, Synthetic Minority Oversampling Technique (SMOTE) for overcoming the data imbalance problem, and Bee Collecting Pollen Algorithm (BCPA) for feature extraction. Combining 184 landslides and ten criteria, including topographic wetness index (TWI), aspect, distance from the road, total curvature, sediment transport index (STI), height, slope, stream, lithology, and slope length, a geographical database was produced. The data was generated using GAN, a Deep Convolutional Neural Network (DCNN) technique to populate the dataset. The proposed DCNN-BCPA approach findings were merged with current machine learning methods such as Random Forests (RF), Artificial Neural Networks (ANN), k-Nearest Neighbours (k-NN), Decision Trees (DT), Support Vector Machine (SVM), logistic regression (LR). The model’s accuracy, precision, recall, f-score, and RMSE were measured using the following metrics: 92.675%, 96.298%, 90.536%, 96.637%, and 45.623%. This study suggests that harmonizing landslide data may have a substantial impact on the predictive capabilities of machine learning models.
Keywords
Introduction
One form of a natural hazard that poses a major risk to both humanity and the environment is landslides [1]. Most landslides are triggered by a single, extremely high rainfall event, an earthquake, human activity, or a trend of persistent rainfall (weeks or days for slow-moving deep-seated landslides, for example). Landslides can be caused by many things, including volcanic activity, rapid snowmelt, and excessive water levels [2]. Hilly areas see more landslides than low-lying ones do. Gravity, stronger at higher inclinations, causes the material to “drag” down the hill. Landslides start to happen when the resistive force reaches a specific point based on the object’s strength, the frictional characteristics of the slide materials and the rock, or a combination of both. Over 70% of catastrophic landslides worldwide result from overly wet circumstances in the Himalayan region [3]. Periodic rains frequently create Himalayan landslides, occasionally resulting in fatalities [4] and inflicting significant financial damages. Froude and Petey’s compilation of a database of fatal landslides revealed 64 fatalities in Bhutan between 2004 and 2017. Yet, it’s believed that there were more casualties overall. As hills are cleared of their vegetation and cut down, the threat is anticipated to rise, highlighting the significance of infrastructure development in light of populace development.
The geographic forecast of landslides is essential in developing landslide risk maps [5]. At this point, landslide inventory levels that offer a geographic map of the risk of landslide measures are used, along with statistical or machine learning representations, to take into account and assess an amount of landslide-conditioning [6].
Statistical and machine learning methods have been heavily utilized in studies on the geographic prediction of landslides [7]. The studies cover a wide variety of topics and focus on several issues, such as Data Imbalance (DI), model evaluation, factor normalization methods, sampling techniques [8], creating training and test samples [9], model assembly [10–11], fine-tuning perfect hyperparameters [12], modeling with limited information, and modeling with limited data. To obtain more accurate prediction of Longitudinal dispersion coefficient (LDC), general structure of group method of data handling (GMDH) is modified by means of extreme learning machine (ELM) conceptions. In fact, with getting inspiration from ELM, a novel GMDH method, called GMDH network based on using extreme learning machine (GMDH-ELM), is proposed in which weighting coefficients of quadratic polynomials applied in conventional GMDH are no longer required to be updated either using back propagation technique or other evolutionary algorithms through training stage [13]. Recent efforts to use machine learning approaches to explore biomarker and clinical marker signatures for optimal management using different clinical cohorts (with almost same number of patients) have shown that the markers [14].
The DI problem in predicting landslides is the main problem with the current study. With landslide spatial projections, DI is a concern. The dataset for landslides comprises two training. The negative class typically outnumbers or underrepresents the positive type. In other words, there is not an equal distribution of both beneficial and adverse justifications. Because they rely on or assume balanced class distributions, most machine learning representations are vulnerable to DI. The classifier becomes more biased in favor of the dominant class; as a result, making it impossible for the algorithms to classify the pixels associated with landslides correctly. Reducing the imbalance consequence in the landslide dataset, then, is crucial. Oversampling a minority lesson and undersampling a majority period are the top strategies for removing imbalance. Many methods, including intelligent under-sampling [15], synthetic sampling with data generation, and random over- and under-sampling, have been employed by numerous scientists to manage DI.
The Generative Adversarial Networks (GAN) used in this study to create the synthetic data, the Synthetic Minority Oversampling Technique (SMOTE) to solve the information imbalance issue, and the Bee Collecting Pollen Algorithm (BCPA) to extract the features all work together to propose a novel landslide prediction method. 184 landslide and 10 criteria, slope, aspect, comprising height, topographic wetness index (TWI), slope length, overall curvature, closeness to a road, lithology, proximity to a stream, and hydrogeologic index, were used to create a geographic database. Data were pooled to fill the dataset, and a Deep Convolutional Neural Network (DCNN), a subtype of GAN, was utilized. After that, the results of the suggested DCNN-BCPA strategy were coupled with commonly used machine learning techniques such as random forests, Artificial Neural Networks (ANN), k-Nearest Neighbors, decision trees, and support vector machines (SVM). Metrics such as the F1-score, Kappa Index, Area Under Receiver Operating Characteristic Curves (AUROC), and Overall Accuracy (OA) were utilized to evaluate the model. Our study demonstrates how balancing landslide information significantly impacts the machine learning algorithms’ ability to predict landslides.
The respite of the paper is organized as surveys: in Unit 2, we analyze studies that have previously addressed problem identification and research limitations. We outline the proposed algorithm and privacy analysis in Unit 3. The investigational findings are accessible and deliberated in Unit 4. Unit 5 provides the conclusions and references for additional study.
Literature survey
Tsangaratos et al. [16] The general issue of DI in machine learning with real-world datasets is not an exception when predicting landslides. Because landslides usually have a restricted number of pixels and are documented in network/grid raster spatial data, landslide databases need to be more balanced. Due to the model’s bias towards the dominant class, this problem affects how well machine learning models predict outcomes. By balancing the dataset, it can be avoided.
Song et al. [17] used a DI learning problem to analyze the challenge of predicting the geographic distribution of landslides. They used a method that addresses the algorithmic aspects of the DI problem by employing a cost matrix designed to make the misclassification cost of the negative samples higher than that of the positive ones. Due to this, misclassifying negative samples as positive samples now comes with a higher penalty.
Zhang et al. [18].’s integration of the adaptive synthetic (ADASYN) sampling process with linear discriminant analysis (LDA) for acoustic prediction of landslides improved the results of sample imbalance-influenced modeling. This was carried out to foresee seismic landslides using seismic data. The DI problem has been approached algorithmically in many studies.
Agrawal et al. [19] associated synthetic versus random oversampling. SMOTE and SMOTE-IPF. They projected that synthesized oversampling outperformed random oversampling based on the results of an analysis using a variety of models based on machine learning, including logistic regression (LR), discrete tree (DT), random forest (RF), support vector machines (SVM), and neural networks (NN).
Haixiang et al. [20] Oversampling the minority class by sample duplication or data manipulation artificially boosts the number of landslide records. On the other hand, the standard period technique aims to decrease the examples of the typical period by purposefully (or randomly) choosing a lesser subset from the innovative dataset. To achieve the required class balance, a randomly selected minority class instance is regularly cloned. Synthesized oversampling goes beyond random sampling by creating new artificial minority class examples by interpolating among multiple similar existing minority class examples.
The capacity of machine learning models to predict spatial landslides was examined by Braun et al. [21] concerning data balance. According to their findings, applying data balancing to the training set that is, enhancing the information density of the proper optimistic essentially had no impact on the DT model’s overall performance. However, the model’s performance changed when the test data were applied. This indicates that using a single data point from a landslide to predict where it will occur in space suggests that the model’s capacity to extrapolate the established parameters to novel situations was constrained.
By analyzing the effects of the lack of landslides (negative samples) on the models, Conoscenti et al. [22] performed landslide susceptibility mapping. To determine the absence of landslides, they used randomly positioned circles with a diameter equivalent to the mean length of the landslide source areas. The non-landslide zones were determined by distributing the constituent grid cells similarly randomly (absence selection). The absences selection method used in this paper’s experiments, which used multivariate adaptive regression splines, proved much better than the alternative method when the learning and validation samples were taken from the same region. However, no discernible difference was found when the models were tested outside the training region.
Kalantar et al. [23] investigated how various landslide samples affected SVM, LR, and ANN techniques. Reveals that the randomization significantly impacts the susceptibility models in the training sample selection. The experiment using training samples was documented in a paper, and the findings indicated that the LR perfect is less complex than the SVM and the ANN representations.
Cheng et al. [24] proposes to develop a machine-learning method for predicting landslide areas in the Tsengwen River Watershed (TRW), one of the most landslide-prone regions in Central Taiwan. From 2009 to 2015, diverse spatial datasets were collected to extract 36 predictive variables for landslide modeling using random forests (RF). In comparison to ground reference data, the results of landslide prediction indicated an overall accuracy of 91.4% and a Kappa coefficient of 0.83. Estimates of predictor importance also revealed to officials that the land-use/land-cover (LULC) type, distance to previous landslides, distance to roads, bank erosion, annual groundwater recharge, geological line density, aspect, and slope are the most influential triggers of landslides in the study region.
Thi Ngo et al. [25] we used two novel deep learning algorithms, the recurrent neural network (RNN) and the convolutional neural network (CNN), to map the avalanche susceptibility of Iran at the national scale. To construct a geospatial database, we compiled a dataset containing 4069 historical landslide locations and 11 conditioning factors (altitude, slope degree, profile curvature, distance to river, aspect, plan curvature, distance to road, distance to fault, rainfall, geology, and land-sue) and divided the data into a training dataset and a testing dataset. Using the training dataset, we then developed RNN and CNN algorithms to generate landslide susceptibility maps of Iran. Using the testing dataset, we determined the receiver operating characteristic (ROC) curve and the area under the curve (AUC) for the quantitative evaluation of the landslide susceptibility maps. The RNN algorithm (AUC = 0.88) delivered superior performance in both the training and testing phases when compared to the CNN algorithm (AUC = 0.85).
Bui et al. [26] To predict landslides, we devised the ABSGD ensemble model, which is a combination of a functional algorithm, stochastic gradient descent (SGD), and an AdaBoost (AB) Meta classifier. We ranked 20 landslide conditioning factors using the least-square support vector machine (LSSVM) method. For the modeling, we considered 98 locations of landslides, of which 70% (79) were used for training and 30% (19) were used for validation. Model validation was performed using sensitivity, specificity, accuracy, the root mean square error (RMSE) and the area under the receiver operatic characteristic (AUC) curve. For model validation and comparison, we also utilized soft computing benchmark models, including SGD, logistic regression (LR), logistic model tree (LMT), and functional tree (FT) algorithms.
Nam and F. Wang. [27] a novel deep learning-based algorithm that combine classifiers of both deep learning and machine learning is proposed for landslide susceptibility assessment. A stacked autoencoder (StAE) and a sparse autoencoder (SpAE) both consist of an input layer for raw data, hidden layer for feature extraction, and output layer for classification and prediction. As a study case, Oda City and Gotsu City in Shimane Prefecture, southwestern Japan, were used for susceptibility assessment and prediction of landslides triggered by extreme rainfall. The results show that the prediction ratio of the combined classifiers was 93.2% for StAE combined with RF model and 92.5% for SpAE combined with RF model, which were higher than those of the SVM (87.4%), RF (89.7%), StAE (84.2%), and SpAE (88.2%). The comparative of the existing methods are discussed in Table 1.
Limitations
“Landslide Data Balancing and Spatial Prediction” is a method that aims to balance unbalanced landslide data and make spatial predictions of landslide susceptibility. However, there are several drawbacks to this strategy, which include the following:
Quality of input data: The accuracy of the landslide vulnerability charts produced by this methodology heavily depends on the input data, including the caliber of the landslide inventory and environmental data. The vulnerability maps produced could only be reliable if the input data is quality. Inherent uncertainty: Because landslide processes are intricate and dynamic, mapping landslide susceptibility is inherently uncertain. This methodology does not consider this uncertainty, which could lead to either overly optimistic or pessimistic results. Limited applicability: Due to its reliance on landslide and environmental data availability, this methodology may not be applicable in all regions. The outcomes might not be accurate in areas with scant data availability. Lack of temporal analysis: This methodology only presents a snapshot of the susceptibility to landslides at a particular time. The area’s vulnerability to landslides may be impacted by material changes in the landscape, which are not considered.
Problem identification
There are two primary difficulties with the “Landslide Data Balancing and Spatial Prediction” problem:
First, Landslide records frequently suffer from a severe class imbalance, with the number of occurrences of landslides being much lower than the number of non-landslide instances. This disparity might be a significant barrier for machine learning and spatial prediction algorithms. Imbalanced data can result in biased model performance, with the model performing well on the majority class (non-landslides) but badly on the minority class (landslides). As a result of this imbalance, predictive accuracy for landslides is lower, and the rate of false negatives (failure to forecast actual landslides) is higher. It is critical to address this class imbalance in order to construct an effective prediction model.
Second, Landslides are impacted by a variety of geographical elements, including terrain, soil composition, precipitation, and land use. These variables are spatially variable and heterogeneous, which means they can change dramatically over short distances. Accurate landslide prediction necessitates accounting for these regional changes, but it also complicates the modeling approach. Traditional machine learning algorithms may not adequately capture spatial dependencies. To account for the spatial aspect of landslide data, specialized techniques such as spatial autocorrelation modeling, geostatistics, or spatial interpolation methods may be required.
The challenge entails creating efficient methods to balance the landslide dataset and enhance spatial prediction precision, which can significantly impact disaster management and land-use planning.
Proposed system
Data collection
The Nilgiris district, situated in the Western Ghats in Tamil Nadu’s northernmost region, is the subject of this study (Fig. 1). Data for this study was gathered from various sources, including historical landslides, official publications, government repositories, and remotely sensed data. The DCNN-BCPA method’s block diagram is depicted in Fig. 1, Generative Adversarial Networks (GAN) are used in this study to create synthetic data, Synthetic Minority Oversampling Method is used to resolve the information disparity issue, and Bee Collecting Pollen Algorithm (BCPA) is used to extract features.
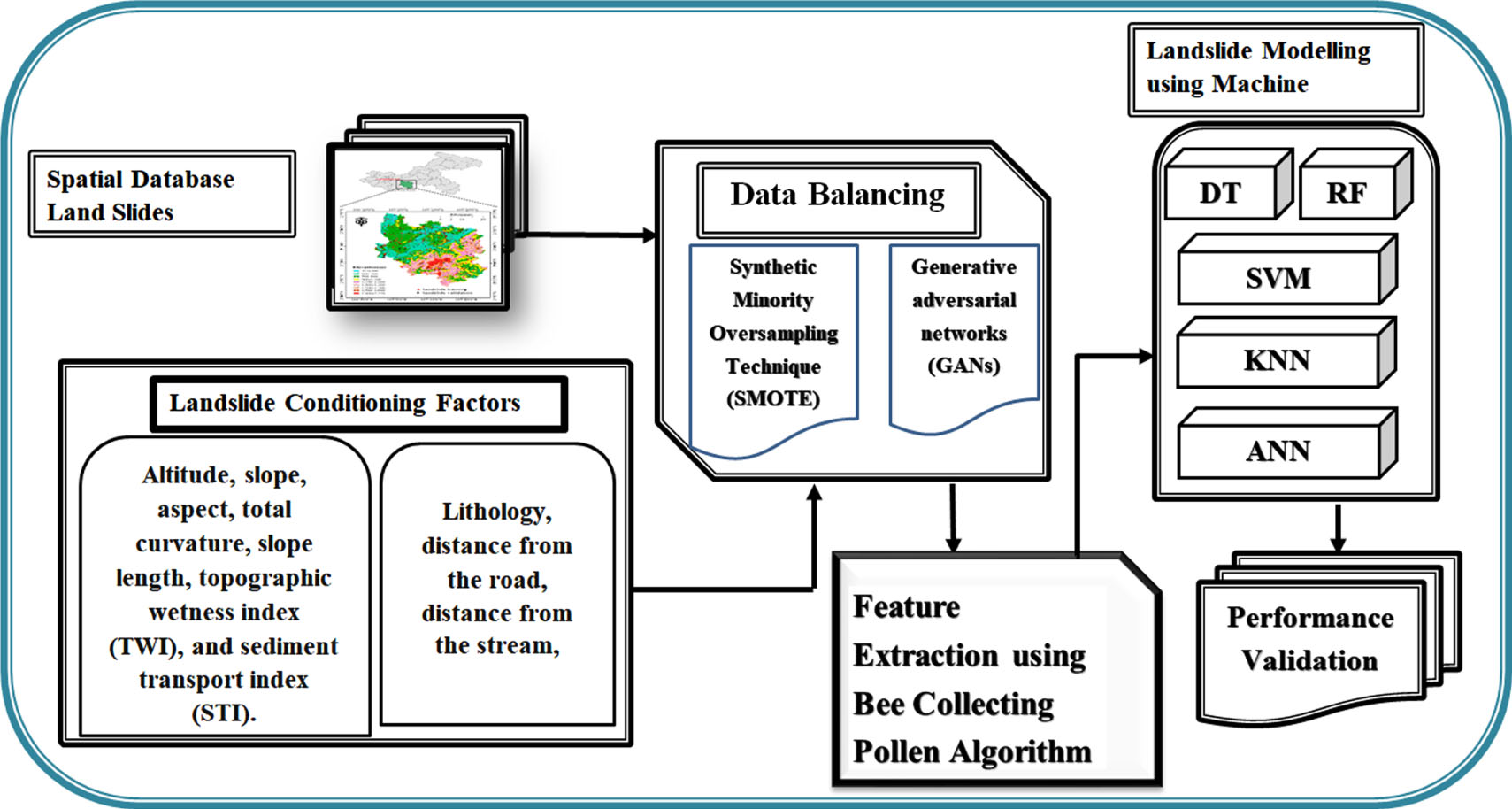
Proposed method of DCNN-BCPA.
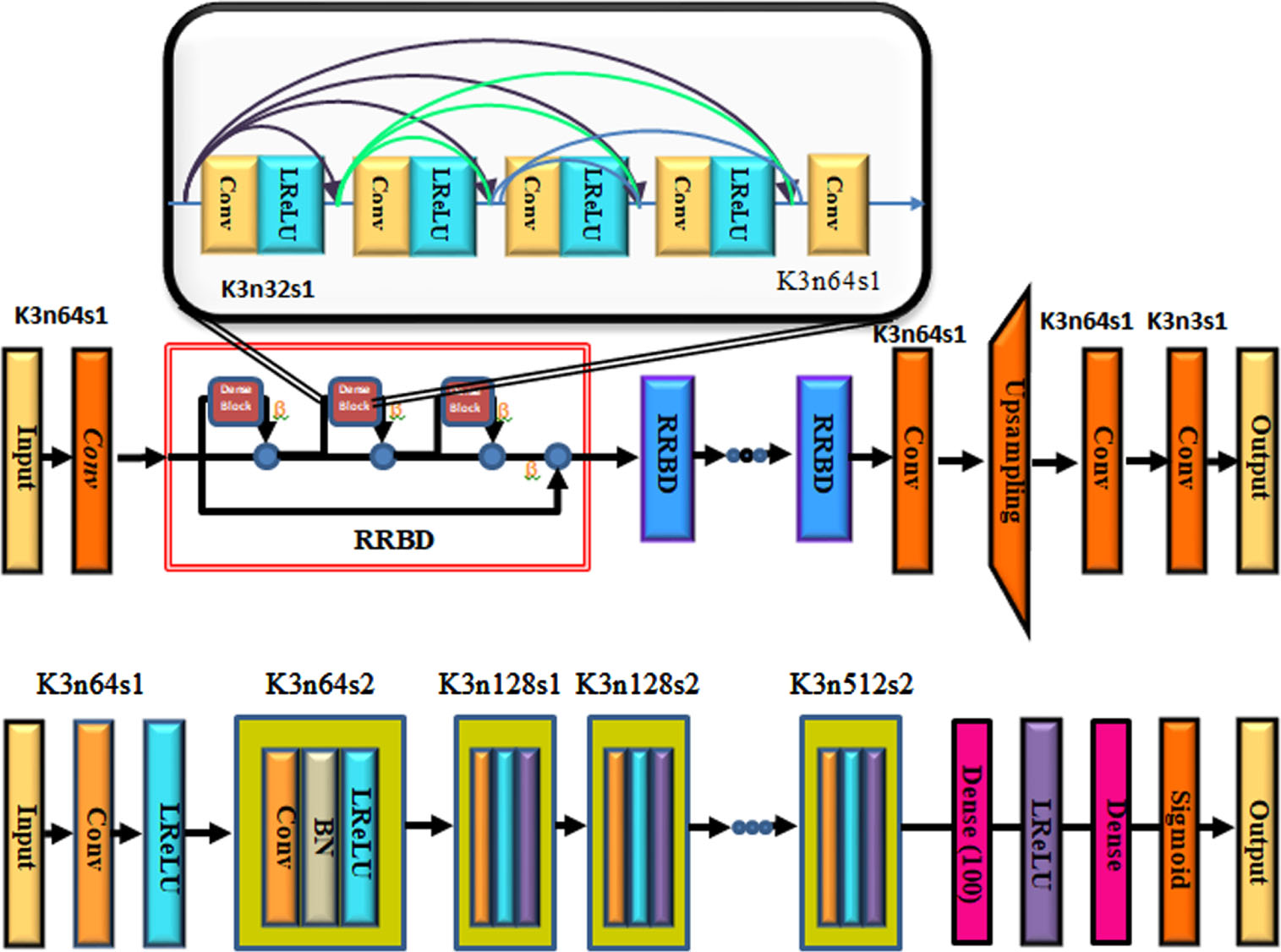
Generator adversarial networks (GAN) architecture.
Precipitating factors for landslides are total curvature, elevation, aspect, slope, slope length, distance from a road or stream, lithology, topographic wetness index (TWI), and sediment transit index (STI). Vegetation density was considered throughout the landslide prediction process. Using data from Landsat 8 images, the normalized transformation vegetation index was utilized to calculate the vegetation’s amount. The four different forms of vegetation density maps are elevated vegetation, medium-density vegetation, low-density vegetation, and non-vegetation [30]. The following is a list of the equations used to calculate STI and TWI.
Synthetic minority oversampling technique (SMOTE)
The first step is to identify the k nearest neighbors of each minority example. SMOTE is regarded as a pre-processing step in landslide susceptibility modeling. After removing DI, it makes it possible to be used on standard machine learning models. The introduced samples may have been interpolated from noisy samples, which prevents SMOTE from effectively handling noise. As a result, data cleaning must be improved after using SMOTE [31].
Utilizing generative adversarial networks, more data creation
The concept of two networks competing underlies generative adversarial networks (GANs). To create synthetic training data that resembles accurate training data, one of the networks is in charge of learning to approximate the distribution that generated the precise training data. In instruction to resolve the adversarial min-max problematic, a Discriminator network D
D
and Generator network G
G
must be defined. The competition between the two networks can be compared to a min-max game where two players compete to outwit one another.
3.3.2.1. Generator
Step 1. By feeding real data I LG into Generator, the artificial data G G (I LG ) is produced. Comparing G G (I LG ) ‘s discriminant result with 1 yields the loss. This loss reveals whether the Generator’s created image can fool the Discriminator.
Step 2. To extract the features of two datasets, feed the Visual Geometry Group (VGG) feature extraction network the real image I HG and the artificial data G G (I LG ). In order to calculate the loss, the characteristics of G G (I LG ) are contrasted with those of the actual image I HG . Keep in mind that the Generator training process necessitates a new set of I HG and I HG . There are three substantial modules between the generator’s input and output.
A Conv layer with 33 kernels and 64 features, as well as a ReLU layer that provides an activation function. The structure for B-residual blocks presented by Gross and Wilber comprises two sets of Conv layers, each with 33 kernels and 64 characteristics, a Convolution layer, and a ReLU layer acting as the activation function. All blocks, except the last, add the input to the output using the residual connection known as Elementwise-Sum. A further residual reference was made for the previous block’s Elementwise-Sum by connecting the first block’s input to its output. Each Deconv layer consists of two Deconv layers, one Conv layer, two Pixel Shuffler layers, and one ReLU activation layer.
3.3.2.2. Discriminator
The discriminator network is responsible for determining whether an input image is natural or artificial, contributing to the denoised data’s appearance. Since the value of generated samples is close to zero, the Discriminator Network must assign the highest possible probability value to actual image data. To create the real image and the artificial image G
G
(I
LG
), adjust the results of I
HG
and G
G
(I
LG
) to 1 and 0 respectively.
When the discriminator receives the inputs I
SG
or I
HG
, it generates judgement results that show whether the input is a genuine dataset or a fake one. Activation function is a Leaky ReLU combined with a Conv layer. Seven blocks contained a leaking ReLU layer, a BN layer, and a Conv layer that was repeated. Each block’s kernel size increased between 64 and 512 bytes cyclically, while the strides alternated between 2 and 1. Another dense activation layer surveys a leaking ReLU layer before the thick, fully connected layer is surveyed. Channel number adjustment is the role of the fully linked layer. The final fully connected layer produces (None, 32, 32, 1), or 1024 discriminations, as its output. The distinctions of an image are then ascertained by averaging the 1024 results.
Loss function:
The typical loss function maximizes mean squared error while minimizing the peak signal-to-noise ratio. The loss function was split into two parts— one for content loss and the other for adversarial loss.
Content Loss:
The content loss
The feature representation of the synthetic dataset G
G
(I
LG
) and the actual dataset I
HG
are separated by a Euclidean distance known as the VGG loss.
The individual feature’s sizes within the VGG network are denoted by Wi,j and Hi,j, correspondingly. It is assumed that φi,j was passed on to the i-th max-pooling layer before it passed on to the j-th Conv feature-map.
Adversarial Loss:
The output probability of the Generator is used to build the GAN’s loss function. The researchers intend to confuse Discriminator when it assesses images produced by Generator by incorporating GAN adversarial loss.
The probability that G G (I LG ) was mistreated as I HG by the discriminator is represented by D D (G G (I LG )).
Existing methods of DCNN-BCPA
This section describes landslide data balancing and spatial prediction algorithms motivated by honeybee colony behavior. The difficulty lies in modifying the colony’s self-organization behavior to address data balancing and spatial prediction issues related to landslides. Waggle dance and foraging are the two main characteristics of the bee colony when looking for food sources (or nectar exploration). We will review how we relate these aspects of a bee colony to spatial prediction and data balancing for landslides in separate subsections [32, 33].
Waggle dance
Upon returning to the hive from nectar exploration, a forager f
i
will effort to achieve waggle dance with probability s and period D = d
i
A, where di varies based on profitability rating and A is the waggle dance scaling feature. In addition, with probability, r
i
it will attempt to observe and imitate a dance chosen at random. Probability r
i
is dynamic and varies based on rating of profitability. A forager will use the dancer’s “path” to find blooming areas if it has decided to follow that dancer. Following indicators left by previous foragers, one can get from the hive to the final destination. The dance will use the forager’s “path,” also called the “preferred path,” to guide its exploration of blooming areas (nectar). To find an optimum medium between landslide data and spatial prediction, it is necessary to link the profitability rating to the objective function. Consider a forager to have a profitability score of Pf I. Originating from:
where
Where n is the amount of waggle dances being performed at time t and
The profitability ratings in Table 2, are used to modify the probability that a forager or colony will choose a particular path. Foragers are more likely to select randomly to follow a waggle dance if they have a lower profitability rating than the colony.
Online resources include the waggle dance probability adjustment table
A populace of l foragers in the colony is provided alongside the algorithm for foraging. These scavengers resolve the spatial prediction and data balancing issues associated with landslides in cycles. The foragers change from node to node along the disjunctive chart’s branches, forming pathways that lead to solutions. A forager needs to travel precisely once from source to sink to each graph node to build a complete solution. Priority restrictions on operations prevent a forager from moving to a node other than those specified in a list of currently permitted nodes while it is at a specific node. The transition probability rule is used by a forager to choose the subsequent node from the list.
ρ
ij
is the rating of the edge among node
i
and node
j
, D is the heuristic distance among them, ρ
ij
is the likelihood that the edge will branch from them, and so on. ρ
ij
is given to the (directed) edge between node
i
and node
j
.
Several environmental elements impact the bee’s capacity to collect pollen. The algorithm should get trapped in a local optimum if the best value remains constant. As a result, the algorithm has some control. Adding a random number causes the bee’s position to change independently.
A death
A honeybee only has six weeks left in its life. Every generation, a new populace of bees will be presented to increase exploitation, encourage individual interactions between the old and new populations, and decrease the rate of natural attrition, all of which could increase the search space of the procedure.
A bulletin
The bulletin records each bee’s optimal choice. Every bee whose position has changed will be compared to the bulletin. The bulletin will be accurate if the change is superior to it. This may result in a worldwide search.
The BCPA is known for efficiently searching the whole solution space. It ensures a thorough search for the best feature subsets by employing many search agents (bees) to collect pollen (solutions) from various locations. With this global search capability, finding high-quality feature combinations is more likely. The BCPA is designed to produce promising results rapidly. It employs a local search strategy, allowing bees to benefit from the surroundings of an existing solution and improve it further. This attribute, as compared to traditional search strategies, speeds up the feature extraction process and enables the speedier acquisition of optimal or nearly ideal feature subsets.
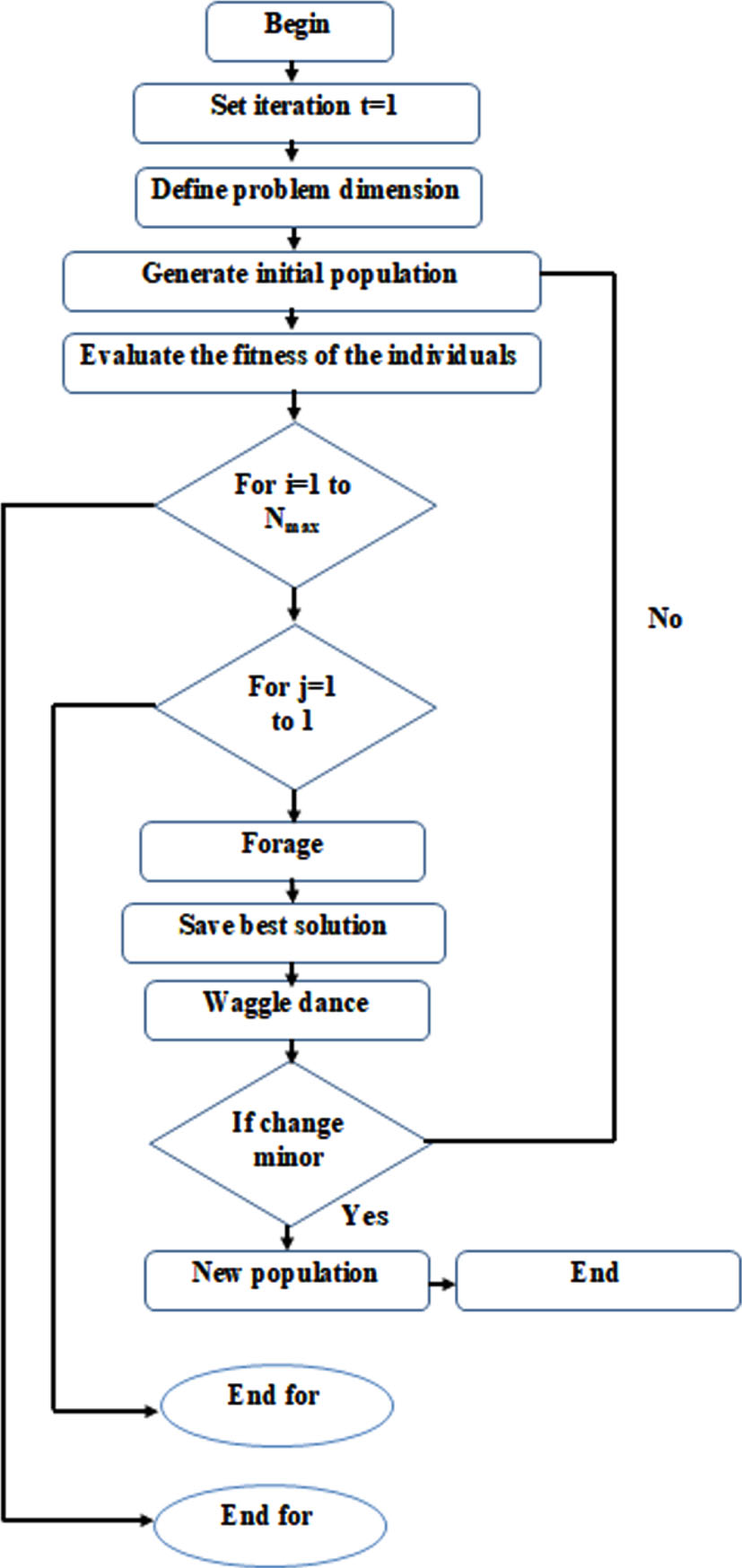
Algorithmic framework
One cycle (or iteration) of this evolutionary computation approach combines the foraging and waggle dance algorithms. This calculation will run for a predetermined maximum number of iterations, Nmax. The final schedule will be provided at the end of the run utilizing the top solution of the iteration process. The main algorithmic framework of the scheduling method is presented in method 1. Figure 3 depicts the BCPA flowchart.
Hyperparameter optimization
In addition, categorical attributes typically have a limited set of permitted values, such as the activation function and optimizer options in a neural network. Consequently, the optimization problem is made more difficult because the feasible domain of hyperparameters, denoted by X, frequently possesses a complex structure.
Typically, the goal of a hyperparameter optimization task is to obtain
Precision evaluation of the DCNN-BCPA method using existing systems.
A hyperparameter, designated x, can take on any value within the search space X. The objective function, f (x), to be minimized may be the error rate or root mean squared error (RMSE). The optimal hyperparameter configuration, x*, produces the highest value for f (x).
The primary HPO technique contains the following phases after selecting an ML algorithm:
Select the performance measures and objective function. Identify the hyperparameters that require tuning, provide a list of their categories, and choose the optimal optimization procedure. Train the machine learning model utilizing the default hyperparameter configuration or common values for the baseline. Start the optimization process with a large search space, determined by manual testing and/or domain expertise, to serve as the feasible hyperparameter domain. If necessary, investigate additional search spaces or narrow the search space based on the regions where the best functioning hyperparameter values have been evaluated recently. Finally, provide the hyperparameter configuration that exhibits the best performance.
Traditional optimization strategies built for convex or differentiable optimization issues are frequently inapplicable to HPO problems due to the nonconvex and nondifferentiable character of the objective function in ML models. Furthermore, when the optimization target is not smooth, even certain standard derivative free optimization approaches perform badly.
Because running an ML model on a big dataset can be expensive in HPO techniques, data sampling is sometimes employed to offer estimates of the objective function’s values. As a result, efficient optimization approaches for HPO issues must be able to use these approximations. However, many black box optimization (BBO) approaches do not take function evaluation time into account, making them inappropriate for HPO issues with time and resource constraints. Appropriate optimization methods must be applied to HPO problems in order to discover the optimal hyperparameter configurations for ML models.
In this paper, a unique GAN-based method was presented for advancing training for several existing machine learning models, including support vector machines (SVM), k-nearest neighbors (KNN), decision trees (DT), and random forests (RF) (SVM). Methods for data balancing need to be developed to forecast spatial landslides. The suggested method for data balancing is based on SMOTE and GAN. In the past, GAN models were used to synthesize datasets to boost the effectiveness of machine learning models. These models can analyze a given training dataset’s structure and then generate new data that closely mimics the training data. Uneven data sets can be made more consistent by using additional training samples.
Analysis of optimization impact on machine learning models
Some hyperparameters significantly impact how well the machine learning models used in this study perform. In this experiment, both the default hyperparameter values and the best-performing values discovered using a randomized search inside a predetermined search space (as described in Table 3) were used. By adjusting the models’ essential hyperparameters, the models were made more precise. These hyperparameters’ common values and each one’s logical minimum and maximum values were used to create the search space. Using cross-validation to get the AUROC accuracy score and determine the best-performing hyperparameter settings, the randomized search approach was used for 20 rounds. Table 3 lists the results of this approach. The studies (conducted in this paper) used these top models compared to the default models.
Summary results of optimization of machine learning models
Summary results of optimization of machine learning models
The quantity of training data influences the efficacy of machine learning models. Several training data sizes were evaluated with the five models employed in this investigation. In addition, various sampling techniques, such as dense, sparse, SMOTE, and GAN, were evaluated with the training data sizes. Generally, the results (as presented in Appendix B) demonstrate that a training size of 0.7 (test data size = 0.3) can achieve good results. Some models, including RF, DT, and k-NN, demonstrated improved accuracy when combined with SMOTE and 0.9 training data size. Other models with smaller training data sizes of 0.5 or 0.3 demonstrated the greatest performance when combined with alternative sampling techniques. However, these outcomes were arbitrary, and no discernible pattern was observed. This study suggests that a training data size of 0.70 should be utilized with the test models.
Evaluation metrics
Each ground truth pixel’s positions and classes were compared to the corresponding pixels in the classified image to create the confusion matrix.
Accuracy:
The following metrics are used to assess the proposed models’ accuracy:
Accuracy is a common and crucial metric for assessing a prediction representation’s entire presentation. It is the percentage of instances that can be accurately classified with the help of cross-validation data or a different test set. “Eq. (13)” was used in this study to quantify accuracy:
False positive, true negative and false negative signals indicate that a model’s pessimistic prediction was incorrect. FP and TN are false positives, and TN for true negative, respectively.
A higher score indicates a model that performs better. The result of averaging the recall (r) and precision (p) scores is F1 (p). Accuracy (p) can be determined by separating the number of true positives by the entire number of pixels (pixels classified as landslides). Sensitivity measures how many accurate positive results can be reliably identified (r). To calculate the value, we divide the entire number of landslide-class pixels by the number of successful matches. Using the formula (14), one can determine their F1-score.
There is an issue with the F1-score metric in that it selects positive-biased segments based on a 0.5 threshold. The performance metrics would change if this threshold were altered. One very popular approach to solve his issue is the AUROC curve.
Five machine learning models were used to test the proposed DCNN-BCPA-based data balancing method for spatial landslide prediction. The following subsections provide a brief description of these models:
Table 4 lists the hyperparameters used during the research. Hyperparameters are often used to optimize the fitting process, which can improve the machine learning model prediction accuracy. The goal of picking hyperparameters is to optimize the evaluation values. Different optimizers were utilized to tune the hyperparameters, with some delivering more accurate results than others. For the assessments in the presented study, the grid search technique was applied. The hyperparameters with the highest accuracy were picked for the final training and testing of the individual machine learning models.
Hyperparameters for optimal values of the machine learning-based models
Hyperparameters for optimal values of the machine learning-based models
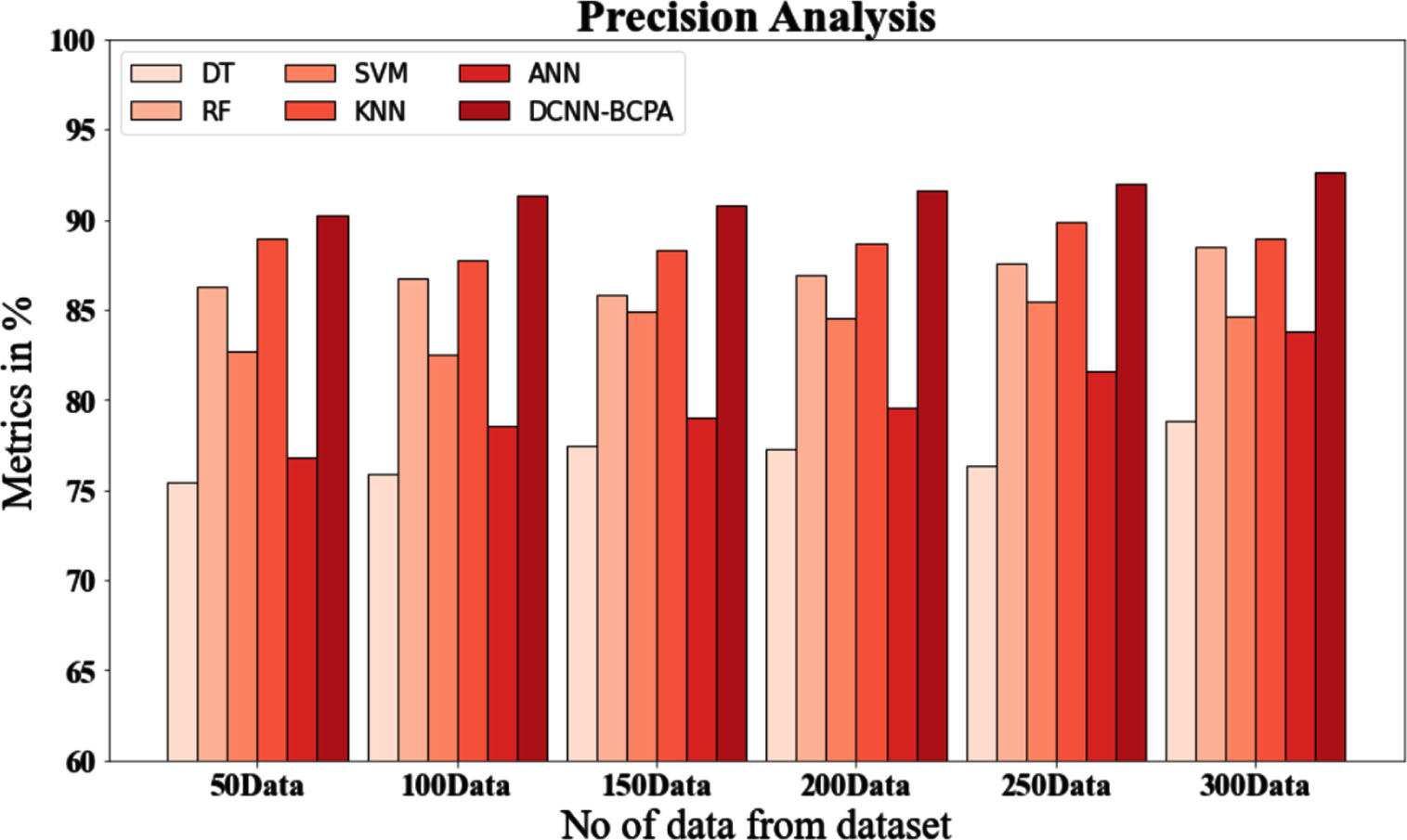
In Fig. 4, and Table 5, comparative precision analyses of the DCNN-BCPA approach and other methods are displayed. The graphic illustrates how performance and precision have increased due to the machine learning method. For example, the DCNN-BCPA model has a precision value of 90.256% with data size 50, whereas the DT, RF, SVM, KNN, and ANN models have accuracy values of 75.436%, 86.294%, 82.738%, 88.937%, and 76.846%. The DCNN-BCPA model, however, has demonstrated its best performance with various data sizes. The precision value of the DCNN-BCPA is 92.675% under 300 data points, compared to 78.826%, 88.536%, 84.632%, 88.964%, and 83.836% for the DT, RF, SVM, KNN, and ANN representations, correspondingly.
Precision evaluation of the DCNN-BCPA method using existing systems.
Precision evaluation of the DCNN-BCPA method using existing systems
Comparative recall testing of the DCNN-BCPA approach against other available techniques is shown in Fig. 5 and Table 6, The graph shows how the machine learning method enhanced performance and recall. For example, with data size 50, DCNN-BCPA has a recall value of 94.447%, whereas the DT, RF, SVM, KNN, and ANN models have recall values of 82.485%, 79.657%, 84.184%, 92.847%, and 87.758%, respectively. Nonetheless, the DCNN-BCPA model performed well with diverse data sizes. Likewise, the recall value of DCNN-BCPA under 300 data points is 96.298%, whereas the DT, RF, SVM, KNN, and ANN models have recall values of 84.294%, 81.937%, 86.384%, 93.344%, and 90.727%, respectively.
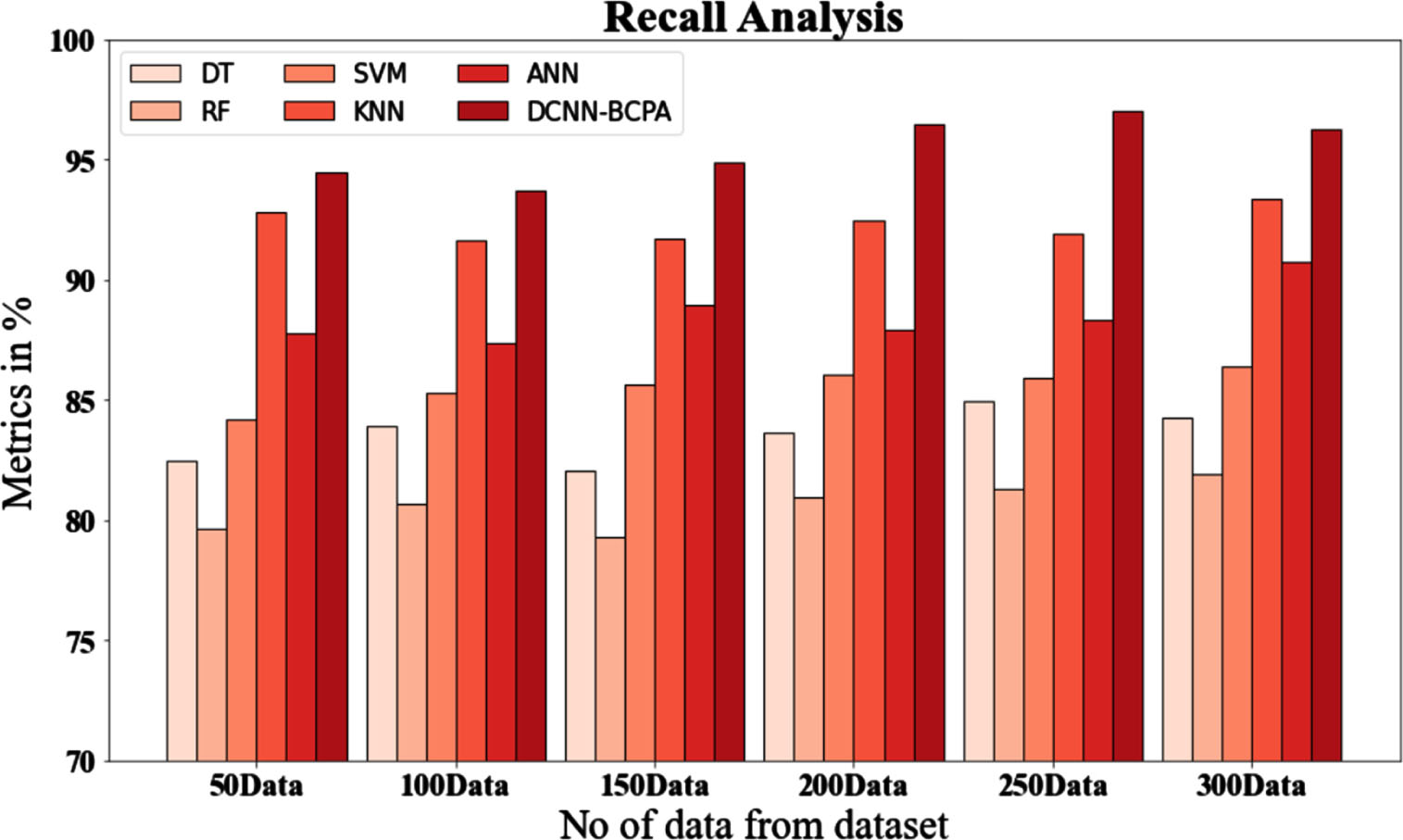
Recall analysis for the DCNN-BCPA approach with existing systems.
Analyze of Recall for the DCNN-BCPA Technique Using Existing Systems
Figure 6 and Table 7, display an f-score comparison of the DCNN-BCPA technique with various known approaches. The graph shows how the machine learning approach has enhanced performance, as indicated by the f-score. With data size 50, for instance, the DCNN-BCPA model’s f-score value is 87.937%, whereas those of the DT, RF, SVM, KNN and ANN models are 85.291%, 78.234%, 76.826%, 83.627%, and 74.937%, respectively. However, the DCNN-BCPA model has performed well across various data sizes. Under 300 data sets, the DCNN-BCPA has an f-score value of 90.536%, whereas the DT, RF, SVM, KNN, and ANN models have 87.536% values, 82.634%, 78.657%, 86.088%, and 75.024%, respectively.
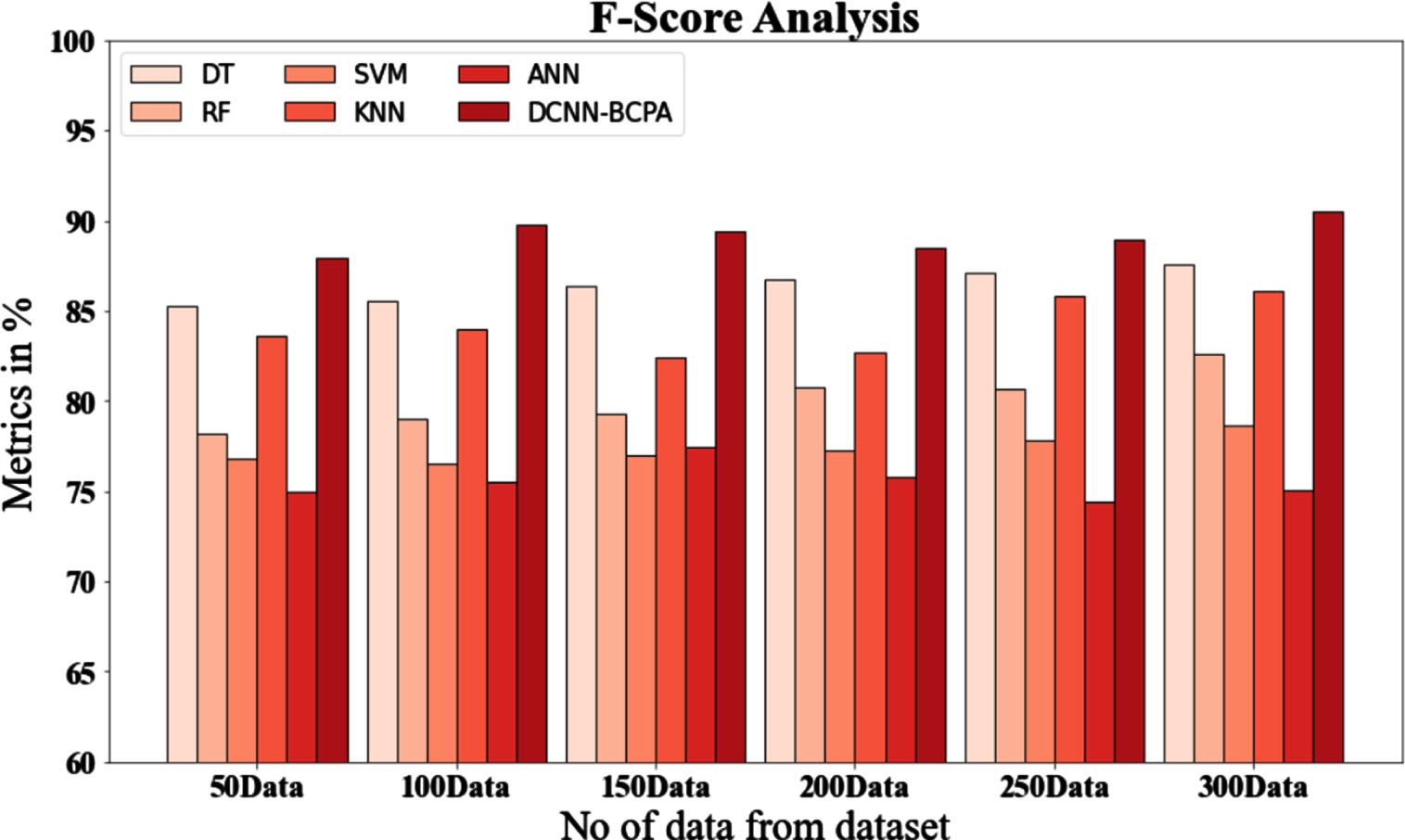
F-score analysis for DCNN-BCPA method with existing systems.
F-score analysis with existing systems for the DCNN-BCPA technique
In Fig. 7 and Table 8, comparative accuracy studies of the DCNN-BCPA approach and other methods are displayed. The graph shows that the performance and accuracy of the machine learning technique have increased. For instance, the DCNN-BCPA model has an accuracy of 93.647% with data size 50, compared to 88.536%, 82.875%, 79.345%, 85.932%, and 90.231% for the DT, RF, SVM, KNN, and ANN models. However, the DCNN-BCPA model has been shown to perform the best across various data sizes. Under 300 data sets, the DCNN-BCPA has an accuracy value of 96.637% compared to the DT, RF, SVM, KNN, and ANN models’ accuracy values of 88.026%, 84.356%, 82.543%, 87.734%, and 91.637%, respectively.
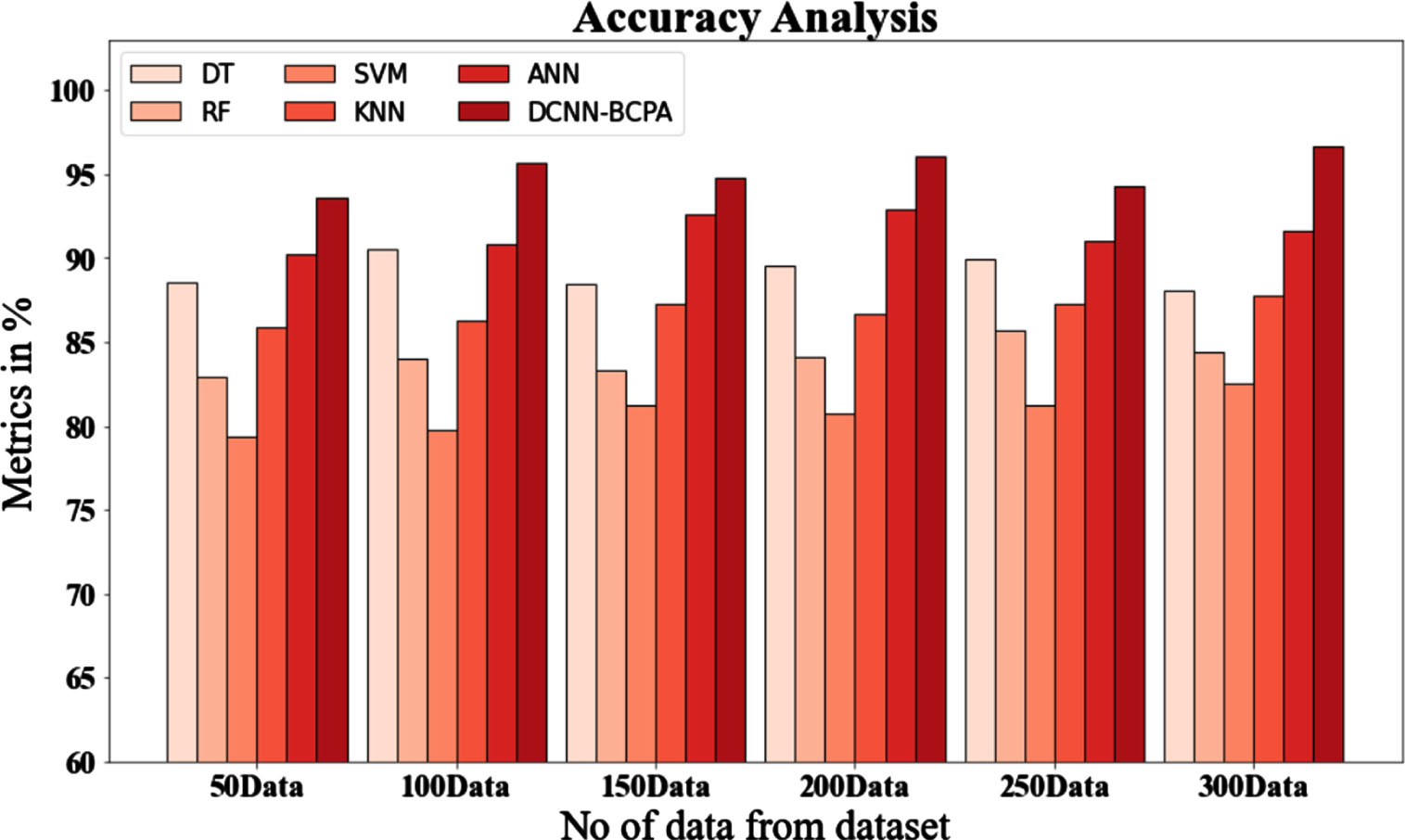
Accuracy analysis of the DCNN-BCPA approach with existing systems.
Accuracy analysis of the DCNN-BCPA approach with existing systems
Figure 8 and Table 9, describe the loss analysis of the DCNN-BCPA method with testing and training datasets. According to the figure, the loss for training and testing validation for 10 epochs is 0.266 and 0.283, respectively. Similarly, the loss for training and testing validation for 100 epochs is 0.26 and 0.43, respectively. The resulting data demonstrates that the proposed method has the lowest loss across various periods.
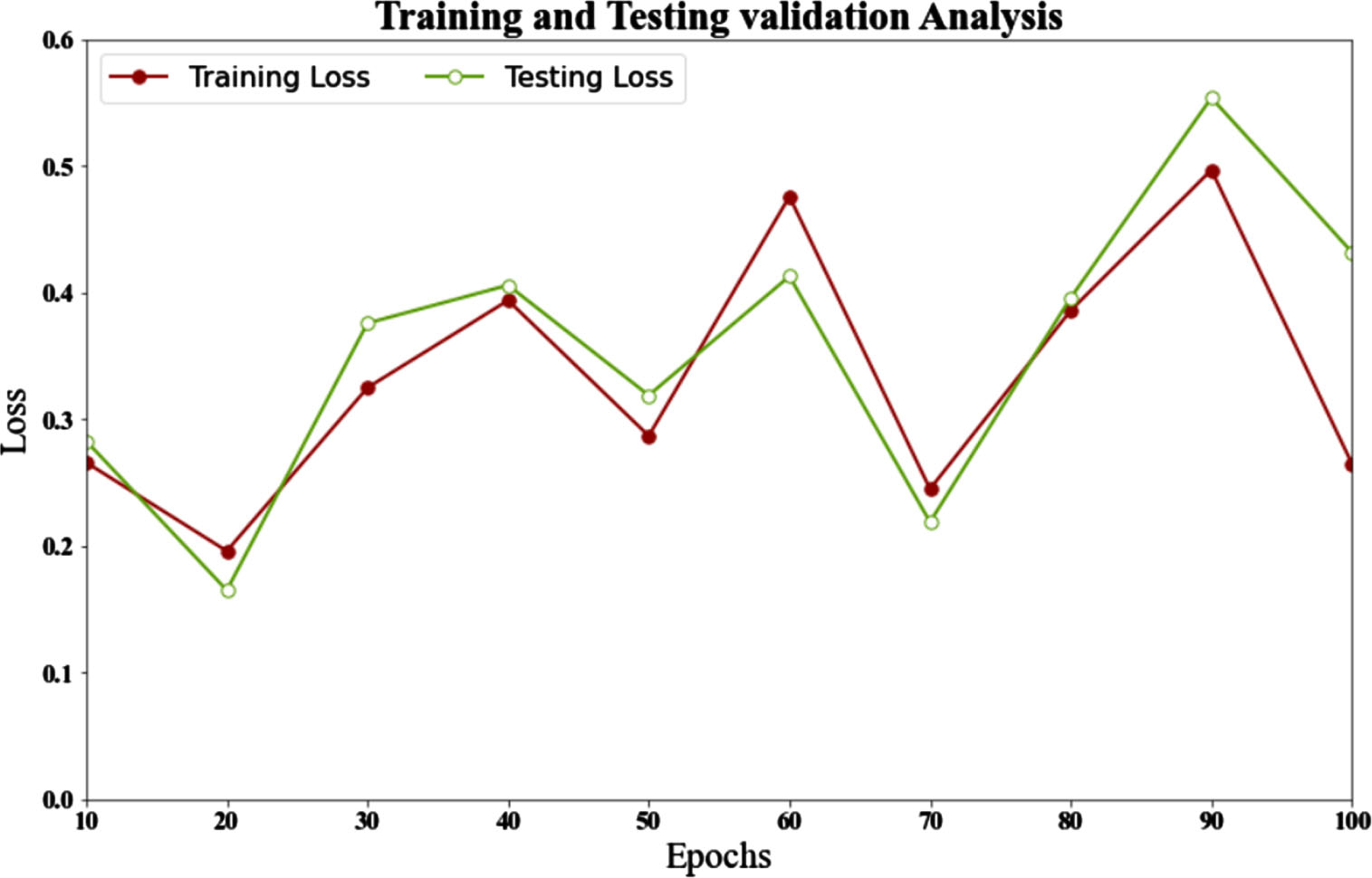
Training loss and testing loss analysis of DCNN-BCPA method.
Analysis of training and testing losses for the DCNN-BCPA method
The DCNN-BCPA approach is compared to other existing methods using RMSE, as shown in Fig. 9 and Table 10, The graph demonstrates that the technique for machine learning improved performance while reducing RMSE. As an illustration, the DCNN-BCPA model’s RMSE value with 50 data points is 41.836%. However, the DT, RF, SVM, KNN, and ANN models have slightly lower RMSE values of 56.637%, 58.938%, 52.937%, 45.936%, and 48.154%, respectively. On the other hand, the DCNN-BCPA model has demonstrated maximum performance with low RMSE values for a range of data sizes. The RMSE value for the DCNN-BCPA under 300 data points is 45.623%, while the corresponding figures for the DT, RF, SVM, KNN and ANN models are 58.524%, 61.774%, 55.834%, 47.737%, and 52.463%.
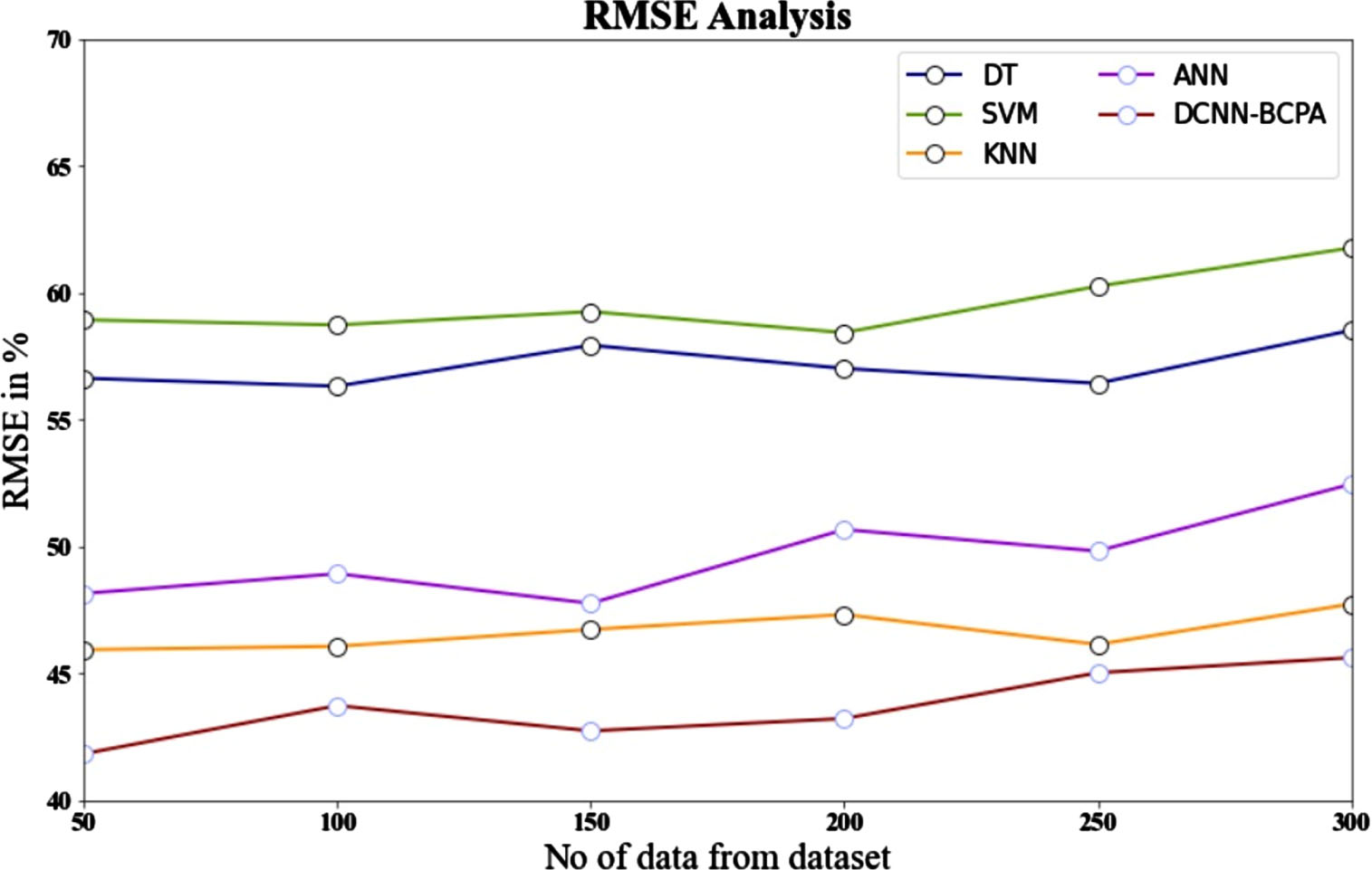
RMSE analysis for DCNN-BCPA method with existing systems.
Analyze of the RMSE for the DCNN-BCPA approach with existing systems
As shown in Fig. 10 and Table 11, the DCNN-BCPA strategy outperforms other existing methods regarding computing cost. For example, the computational cost value of the DCNN-BCPA model with 50 data points is 21.098%. ON THE OTHER HAND, the DT, RF, SVM, KNN, and ANN models have slightly lower computational cost values of 44.566%, 38.244%, 34.988%, 30.233%, and 26.675%, respectively. In contrast, the DCNN-BCPA model has demonstrated maximum performance with low computational cost values across various data sizes. The computational cost value for the DCNN-BCPA under 300 data points is 25.987%, whereas the DT, RF, SVM, KNN, and ANN models are 48.343%, 43.98%, 37.277%, 33.455%, and 28.955%, respectively.
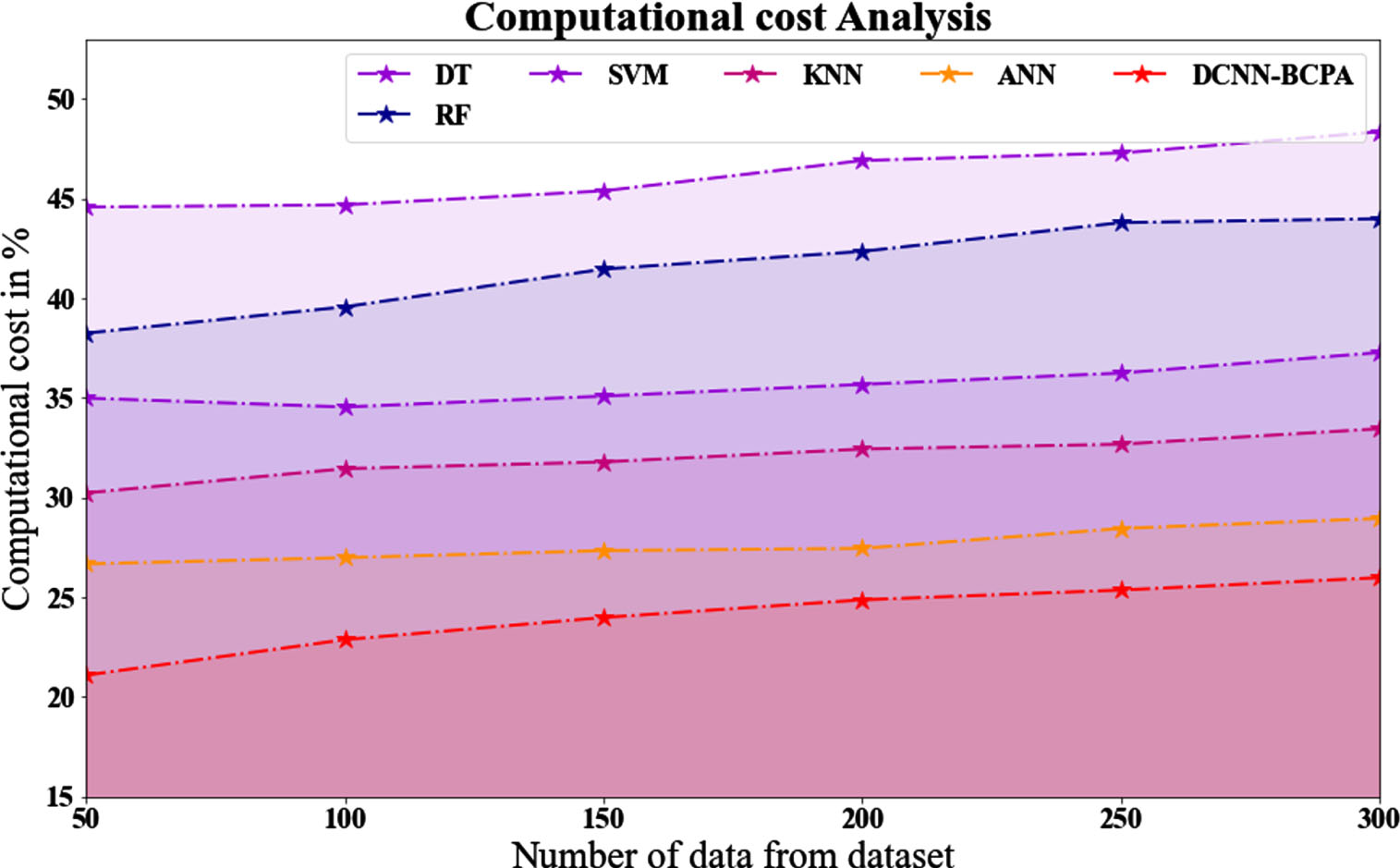
Computational cost Analysis for DCNN-BCPA method with existing systems.
Analyze of the computational cost for the DCNN-BCPA approach with existing systems
The AUROC map for the top-performing models balanced with DCNN-BCPA is shown in Fig. 11. These graphs aid in better understanding of the link between the true positive rate and the false positive rate. In this context, a score of 1.0 implies the best AUROC, while a score of 0.5 denotes the worst AUROC. A comparison of the accuracy assessments between the DCNN-BCPA and the benchmark methods demonstrates that the DCNN-BCPA model outperforms other classifiers in predicting landslide susceptibility. The AUROC values calculated for the DCNN-BCPA and benchmark techniques show that the DCNN-BCPA technique has significantly higher accuracy than the benchmarks. This conclusion implies that the features recovered using this method can characterize landslide susceptibility more precisely than the benchmark methods, as measured by the AUROC indices. Notably, the DCNN-BCPA model (with an AUROC of 100%) outperforms individual classifiers such as SVM (with an AUROC of 88%), KNN (with an AUROC of 78%), DT (with an AUROC of 92%), RF (with an AUROC of 95%), and ANN (with an AUROC of 94%), as measured by the recorded indices.
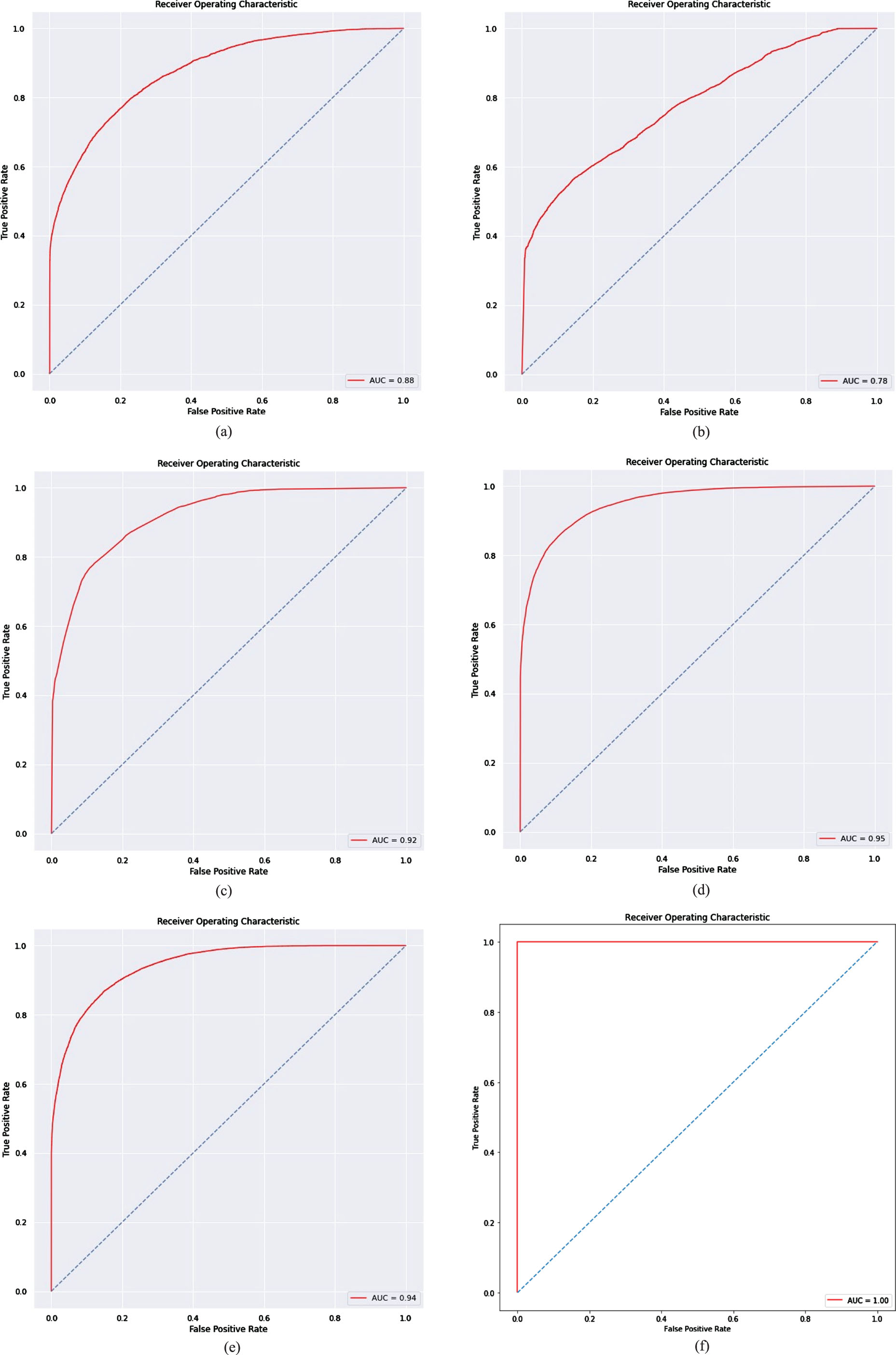
Evaluation of the landslide susceptibility maps based on the AUROC test using: (a) SVM, (b) KNN, (c) DT, (d) RF, (e) ANN and (f) Proposed DCNN-BCPA method.
In this article, we provide a novel technique for landslide prediction using Generative Adversarial Networks (GAN) to produce synthetic information, Synthetic Minority Oversampling Technique (SMOTE) to address the problem of information imbalance, and Bee Collecting Pollen Algorithm (BCPA) to extract features. An area-wide database of 184 landslides was constructed using 10 criteria: topographic wetness index (TWI), aspect, distance from the road, total curvature, sediment transport index, height, slope, stream, lithology, and slope length. The dataset was then filled using a GAN called the Deep Convolutional Neural Network after the data were pooled (DCNN). Then, the outputs of the suggested DCNN-BCPA strategy were integrated with or added to those of other machine learning methods currently in use, such as decision trees (DT), random forests (RF), artificial neural networks (ANN), k-nearest neighbors (KNN), and support vector machines (SVM). The model’s accuracy, precision, recall, f-score, and RMSE were measured using the following metrics: 92.675%, 96.298%, 90.536%, 96.637%, and 45.623%. Our research shows that balancing landslide data significantly affects how precisely machine learning algorithms can predict outcomes. Future studies should evaluate the efficacy of Metaheuristic using additional ML methods like RFs and CNNs. The PI-normalized average width (PINAW) and PI-coverage probability (PICP), which are used to judge the suitability of PIs, could also be utilized as inputs for the detection of significant differences in situations with absolute uncertainty. We will be able to comprehend the physical dynamics underlying geohazard modeling better if we combine data-driven models with physical models to create ML models that are explicable and interpretable.
Declarations
Contributions
Aruna Jasmine and J Heltin Genitha contributed to the design and implementation of the research, to the analysis of the results and to the writing of the manuscript.
Data availability
The data used to support the findings of this study are available from the corresponding author upon request.
Conflicts of interest
The authors declare no conflicts of interest.
Funding
The authors received no specific funding for this research.
Ethics approval
Not applicable.
Consent to participate
Not applicable.