
Abstract
In this paper, the robust stability of nonlinear system with unknown perturbation is considered combining operator-based right coprime factorization and fuzzy control method from the input-output view of point. In detail, fuzzy logic system is firstly combined with operator-based right coprime factorization method to study the uncertain nonlinear system. By using the operator-based fuzzy controller, the unknown perturbation is formulated, and a sufficient condition of guaranteeing robust stability is given by systematic calculation, which reduces difficulties in designing controller and calculating inverse of Bezout identity. Implications of the results related to former results are briefly compared and discussed. Finally, a simulation example is shown to confirm effectiveness of the proposed design scheme of this paper.
Keywords
Introduction
Due to uncertainties widely appear in many practical systems, the problem of robust control for nonlinear systems restricted by unknown perturbation has been received much attention during the recent decades [1–7]. For dealing with this issue, there exist several methods, such as fuzzy control method, sliding mode control method, adaptive control approach, Lyapunov method, right coprime factorization and so on [8–19]. A series of literatures based on adaptive fuzzy control or observer-based fuzzy control using back-stepping design for a class of uncertain nonlinear systems are researched [20–23]. It is worthy noting that the aforementioned methods are addressed based on one premise that the full states are measurable. However, in practice, it is hard to employ a state feedback law in most of the cases.
Motivated by this, in this paper, an operator-based right coprime factorization from input-output view of point is proposed to consider robust control for nonlinear systems with unknown perturbation [14, 24–27]. As for robust control using operator-based right coprime factorization, it is first studied in [14], in which robust stability is guaranteed by assuming the unknown perturbation is contained in null set of the responding controller. This assumption is a strong restrict for the unknown perturbation. After that, a Lipschitz norm inequation [17] is proposed to consider the robust stability, which gives a sufficient condition to guarantee the inverse existence of robust Bezout identity. Due to the unknown characteristic, the responding controller cannot be obtained by precisely designing, which is obtained based on trial and error. Moreover, inverse of Bezout identity needs to be calculated [17]. In [27], nonlinear control systems with uncertainties are considered by using operator-based robust right coprime factorization for guaranteeing robust stability, as well as rejecting adverse effects resulting from the existing disturbance and internal perturbation quantitatively. However, in this paper, the real disturbance signal is linked to a designed controller for transforming into a limited assumed signal, restricting its application for some case. Moreover, the practical applications using operator-based right coprime factorization method also have achieved many results [28–30]. In [29], vibration control of an L-shaped arm driven by a linear pulse motor is considered based on an operator-based right coprime factorization. Meantime, a tracking compensator is proposed to compensate the hysteresis of the piezoelectric actuator. Wireless power transfer systems with uncertainty is considered from the robust control method and tracking performance in [30]. The mentioned results [14, 27] have a restriction that the unknown perturbation is satisfied with the matching conditions and the proposed controller is designed merely by the boundary of perturbation. However, in practical application, many cases may contain the unmatching unknown perturbation. In these cases, the mentioned previously results for guaranteeing robust stability of nonlinear system with unknown perturbation fail.
From the above analysis on the literature, it is important and challenging to handle the unmatching unknown perturbation of systems from the viewpoint of input -output to guarantee robust stability of system, and to reduce difficulties in calculating inverse of Bezout identity of coprime factorization. Therefore, in this paper, an improved operator-based right coprime factorization method is proposed by combining fuzzy logic system for nonlinear system with unknown perturbation to guarantee robust stability and reduce computation complexity in designing controllers. Main contribution of this paper can be summarized as follows:
(1) In this paper, fuzzy logic technology and coprime factorization method are combined to deal with unknown nonlinear perturbation of the nonlinear system for guaranteeing robust stability.
(2) By using the approximated perturbation information, an operator-based feedback controller is constructed without needing to calculate the Bezout identity, which can relax the constrains on sufficient condition on robust stability of the considered system compared with [18].
(3) Compared with the former results [27], the proposed design scheme can not only provide a quantitative design for a precise controller but also remove the difficulties in calculating inverse of Bezout identity.
The organization of the rest paper is summarized as follows. Related mathematical preliminaries for developing results in this paper is recalled, and problem setup are addressed as well in Section 2. In Section 3, main results of this paper are developed. A simulation example is given to confirm effectiveness of the proposed method in Section 4. Finally, in Section 5, conclusions of this paper are summarized.
Mathematical preliminaries and problem statement
In this section, some basic definitions and notations on the robust right coprime factorization are addressed followed by [14], which are necessary to propose main results of this paper.
Mathematical preliminaries
Let
Note that, the actual norm for a nonlinear operator A is given by
Now some inverse operators will be concerned. Moreover, let X e be a normed linear space, which is defined as above, and let D e be a subset of X e .
It is worth to mention that the following results are evident from the fundamental definition on the invertibility of the operator.
Problem statement
In this paper, consider the nonlinear feedback system with unknown perturbation shown in Fig. 1.
Note that in terms of operator-based right coprime factorization discussed in this paper, it is under the Lipschitz operator framework, which means that all the appeared operators are satisfied with Lipschitz without specific statement.
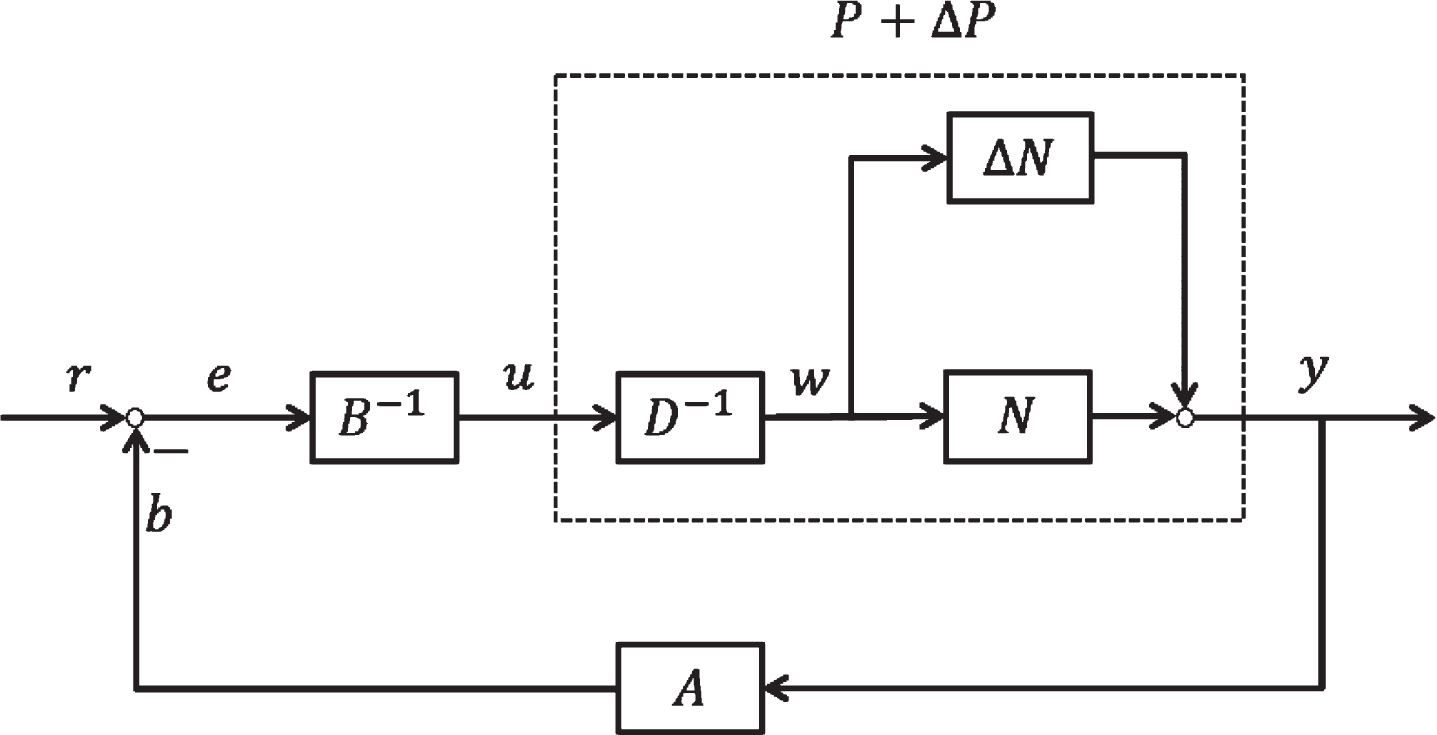
Nonlinear feedback system with unknown perturbation.
As to the nonlinear system with unknown perturbation shown in Fig. 1, the following condition is proposed to guarantee robust stability based on the null set of the controller A, which means that the unknown perturbation need match the null set condition [14].
In [17], authors proposed a condition using the Lipschiz norm inequation designed by trial and error to achieve robust stability as follow, where M is an unimodular operator of Bezout identity.
Note that from the first result of [14], the research for robust control using operator-based right coprime factorization is focused on how to guarantee robust Bezout identity by trial and error design due to that the perturbation is unknown as shown in [17]. However, there exists yet an important research point that seems to be left out of investigation: approximate unknown perturbation to obtain a exact controller for robustness of right coprime factorization itself.
The control objective of this paper is to approximate the unknown perturbation using fuzzy logic system, then based on operator-based right coprime factorization to design the controller by obtaining approximated operator such that the uncertain nonlinear system is robustly stable, while the proposed sufficient condition is free of the former restrictions.
Firstly, for dealing with the unknown perturbation of the nonlinear systems, the fuzzy logic system [31] is introduced to approximate it. From a mathematical point of view, the following fuzzy logic system is considered to approximate the unknown perturbation ΔN defined on Banach space W.
In this subsection, we will prove for the operator-based fuzzy control, there exists a fuzzy logic system to approximate the unknown perturbation operator ΔN shown in Fig. 1.
This completes the proof.
Note that the characteristic of the considered nonlinear systems is accordance with [14, 17]. The basic idea of operator-based right coprime factorization is proposed based on the definitions of Banach space, Lipschitz operator, generalized Lipschitz operator. After that, robust stability for the nonlinear systems with unknown perturbation will be discussed based on the obtained P ΔN .
For developing the results of robust stability, firstly, the extended results on judging inverse of operators is given as follows. Compared with previous result [26], the proposed results contains one parameter to give one more freedom for designing the controller.
At first, prove the operator kI - J is injective. In fact, for each u1, u2 ∈ U,
Then, that the operator kI - J is surjective is verified.
Define that T0 : = I and T
n
: = kI+ JTn-1, ∀ n = 1, 2, ⋯, we can prove that for each u ∈ U
Since J is Lipschitz and thus is continuous, we have
Therefore, based on
Since H = (H (kL) -1) kL, obtain that H has an inverse, namely, H-1 = (kL) -1 (H (kL) -1) -1. Also,
After the above preparatory work, control design scheme for nonlinear systems with unknown perturbation is given for guaranteeing robust stability. Firstly, two operator controllers are designed precisely using the approximated P ΔN . Then, based on the proposed controllers, one sufficient condition is given for guaranteeing the robust Bezout identity is satisfied, which contains one more freedom for the controllers’ design and is free of such match conditions in [14, 17].
Indeed, A (N + P ΔN ) + BD is unimodular. Since A is linear and combining ∥ (AP ΔN ) -1 (AN + BD) ∥ ≤1, get AN + BD + AP ΔN is unimodular, which means robust stability of the considered systems can be guaranteed.
The proof is completed.
Note that the design steps can be summarized as follows. Firstly, fuzzy logic system is employed to approximate the unknown perturbation in a neighbourhood. Then, design two controllers A and B based on the obtained approximated P ΔN and the proposed sufficient conditions, where the error of between P ΔN and ΔN is considered, which is also a quantitative scale for designing the controller A, instead of designing A by trial and error.
For the sufficient conditions, the merits lies in that (a). Using the general result on B and P ΔN , design the controller A precisely; (b). No requirement that the calculation inverse of AN + BD, which is one main difference from the former results of operator-based right coprime factorization. Clearly, it reduces to calculate the inverse of AN + BD compared to [14]. This paper focuses on finding trade-off between real application and theoretical analysis.
In this section, a simulation example of unstable nonlinear system is proposed in order to confirm effectiveness of the proposed design scheme of this paper.
Let C[0,∞) is the space of continuous functions, and
For the given plant P (u (t)), we now study how to guarantee its robust stability by using the proposed design scheme and show the advantage over the former methods. First of all, we need point out that the considered plant operator P (u (t)) is unstable in the sense of BIBO stability.
Indeed, let u (t) =1,
Based on the given operator plant P (u (t)), a right factorization of the considered plant is shown by N (ω (t)) and D-1 (ω (t)).
In terms of the shown right factorization, it can be confirmed that P (u (t)) = ND-1 (u (t)), where D-1 (ω (t)) is unstable. In this paper, the proposed design scheme circumvents the difficulties in calculating the Bezout identity of the nominal nonlinear system, therefore, in what follows, we directly aim on cases of the nonlinear system with unknown bounded perturbations to show the effectiveness of the proposed design scheme.
In terms of the unstable nonlinear plant P (u (t)), the right factorization of the overall plant with perturbation is given as follows for confirming effectiveness of the proposed design scheme. The existing perturbation δ (t) is chosen as δ (t) =0.2t + sin (t) +0.05.
Then, the perturbed nonlinear system and its right factorization can be given as follows:
With respect to P + ΔP and N + ΔN, we will utilize
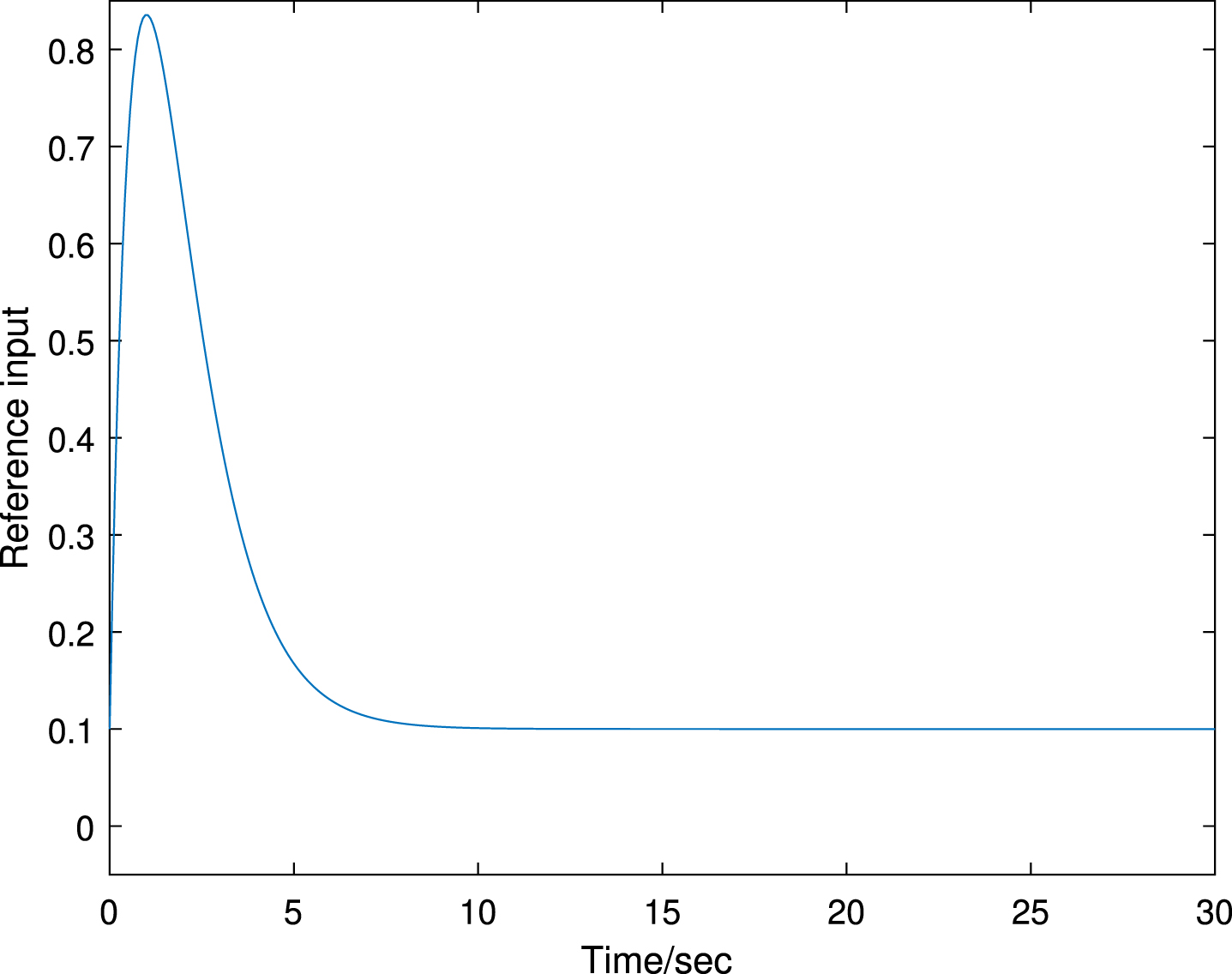
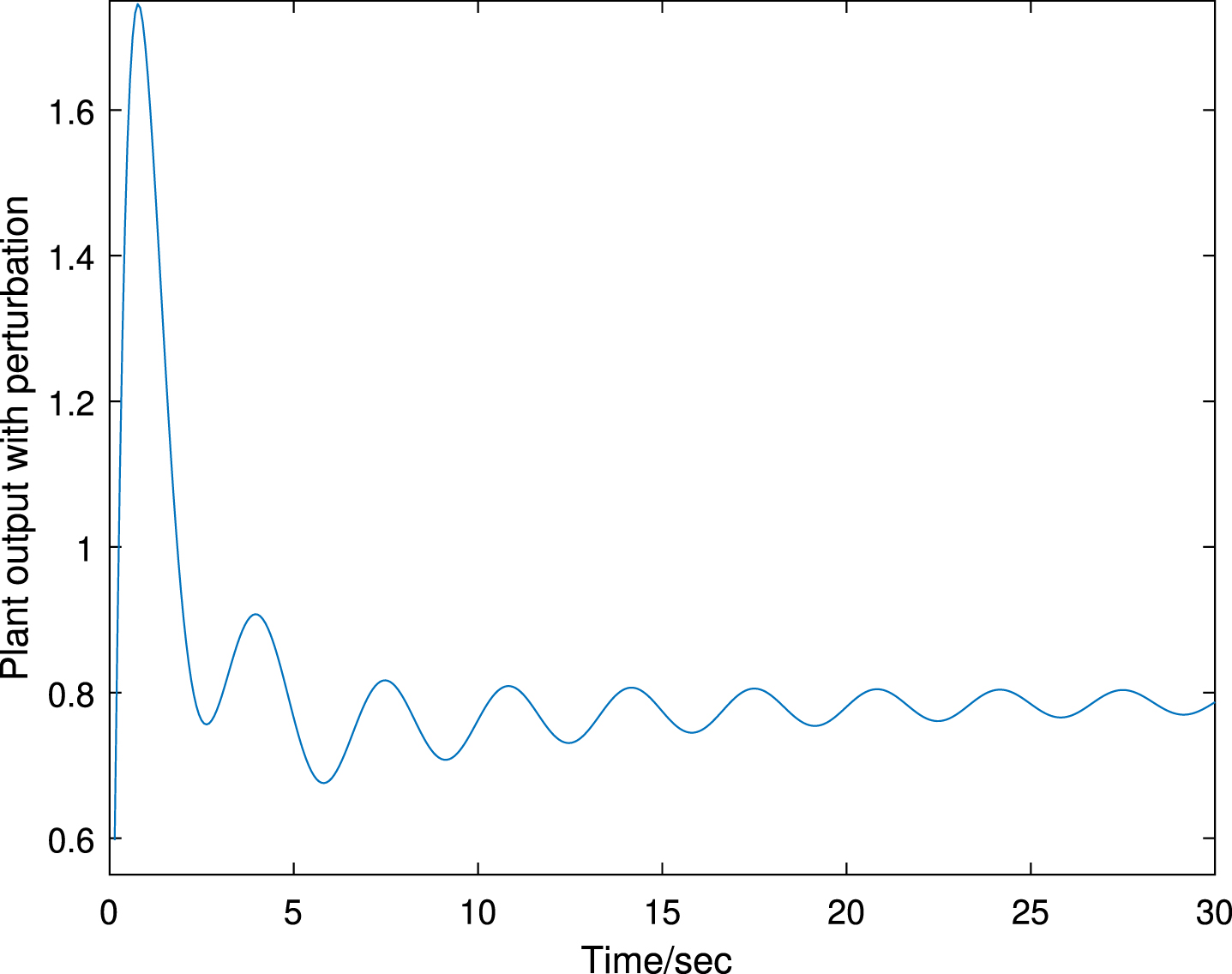
In order to show the example more explicitly, the reference input is chosen as r (t) =2te-t. Then the simulation results of reference input r (t) and plant ouput y (t) are given in Figs. 2 and 3, respectively. From the Fig. 3, robust stability of the overall nonlinear system is guaranteed by the proposed design scheme.
Nonlinear feedback system with unknown perturbation.
Nonlinear feedback system with unknown perturbation.
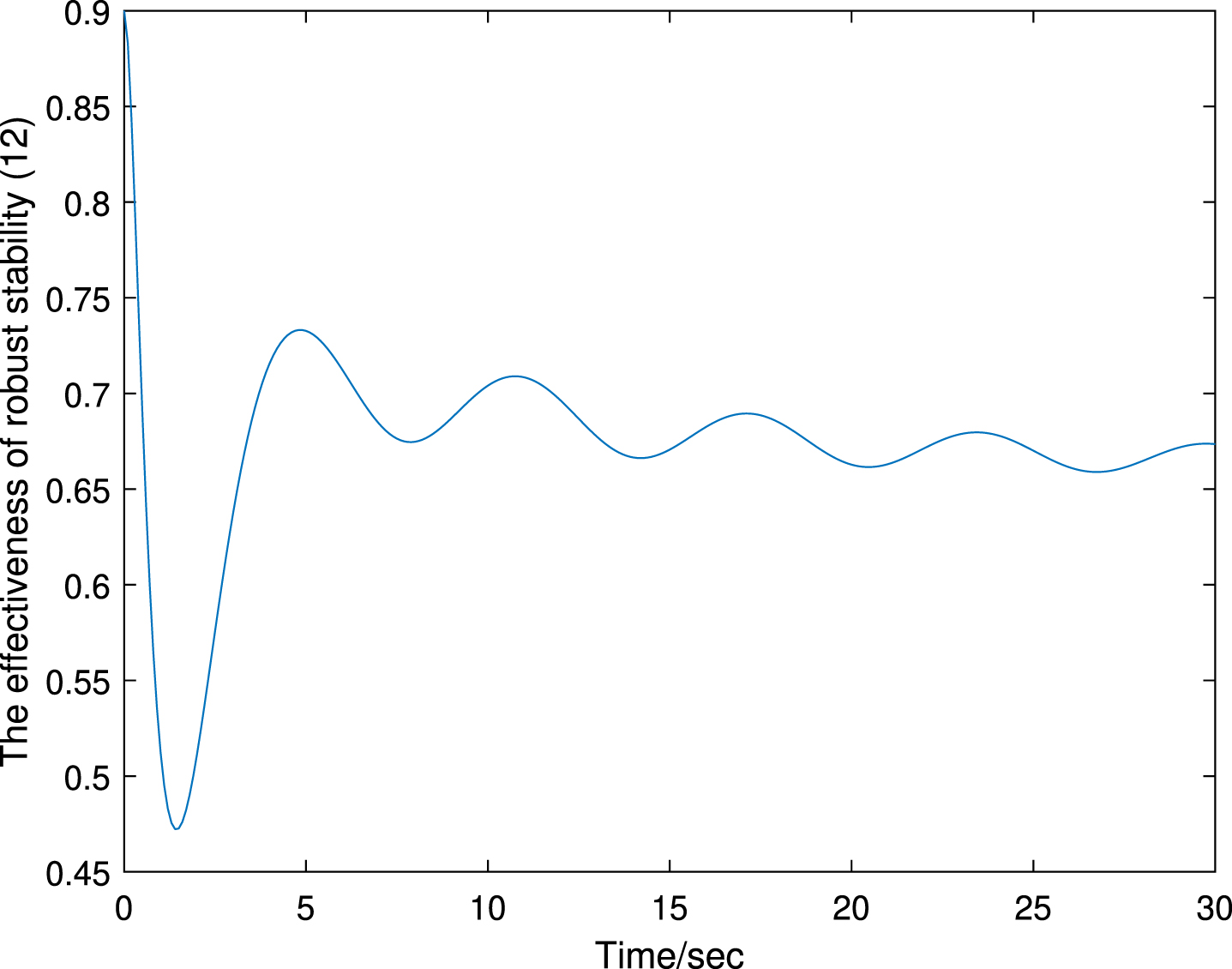
The effectiveness of robust stability (12).
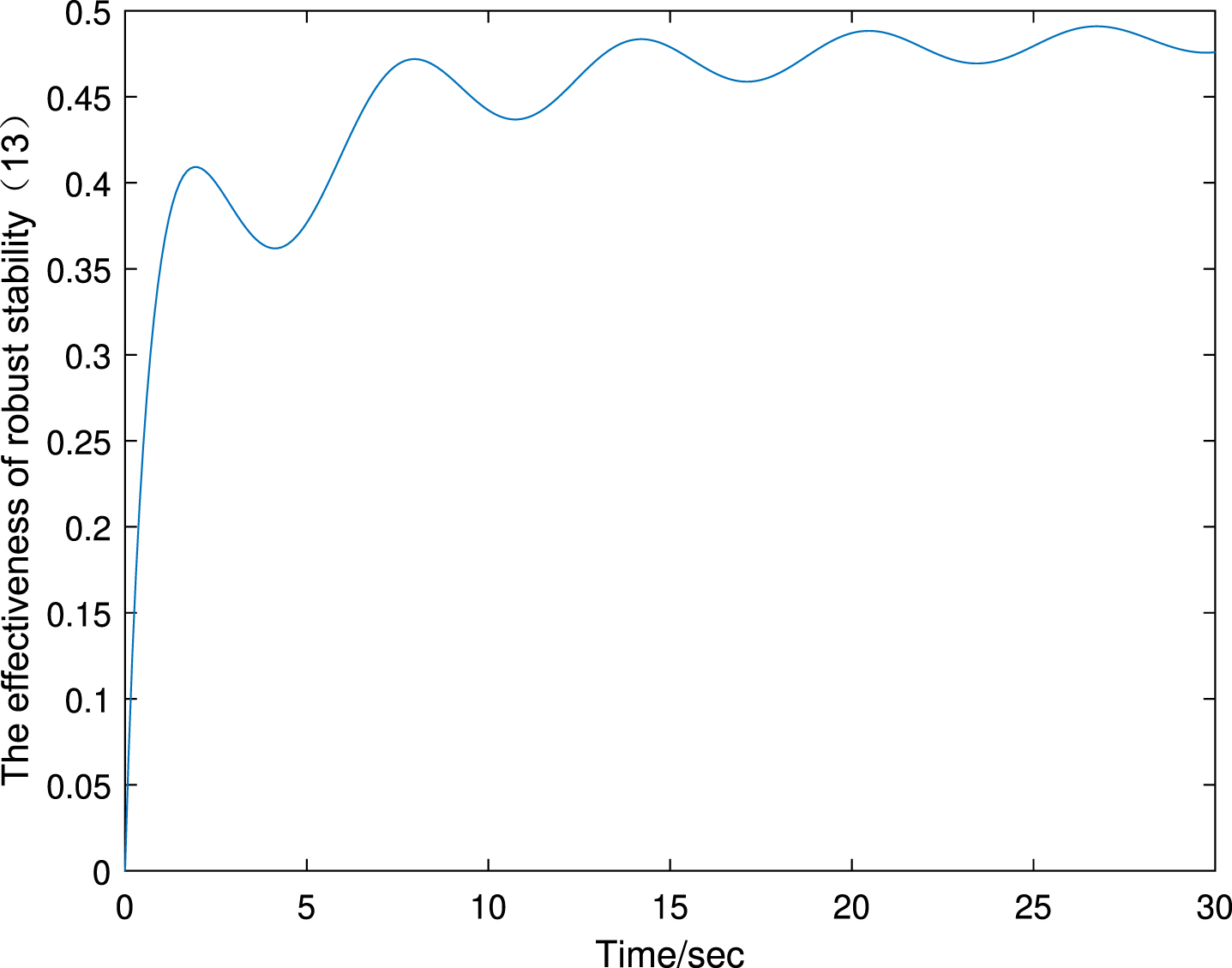
The effectiveness of robust stability (13).
In this paper, the robust stability of nonlinear system with unknown perturbation is considered by combining operator-based right coprime factorization and fuzzy control method from the input-output view of point. By using the operator-based fuzzy control, the unknown perturbation was formulated, and a sufficient condition of guaranteeing robust stability was given by systematic calculation, which reduced difficulties in designing controllers and calculating inverse of Bezout identity. The simulation example was shown to confirm effectiveness of the proposed design scheme. However, the proposed method cannot handle the stochastic factor appearing in the system. In the future work, using It
Acknowledgment
This paper was supported by the National Natural Science Foundation of China (No. 62301212), Major Science and Technology Projects of Longmen Laboratory (No. 231100220300), the Program for Science and Technology Innovation Talents in the University of Henan Province (No. 23HASTIT021), the Key Scientific Research Projects of Universities in Henan Province (No. 22A413002), the Scientific and Technological Project of Henan Province (Nos. 222102210056, 222102240009), the Postdoctoral research grant in Henan Province (No. 202003077), the Science and Technology Development Plan of Joint Research Program of Henan (No. 222103810036).