
Abstract
Recent developments in wireless sensor networks (WSNs) have generated interest in the area of sensor tracking events. The proposed work aims to decrease energy usage by identifying functional relay nodes utilizing the enhanced energy proficient clustering (EEPC) method. To minimize long-distance interaction between CH and BS, a power-efficient relay chosen technique is proposed using improved Grasshopper Optimization algorithm (IGOA). The network is constructed using both mobile and fixed nodes. Mobile nodes first choose cluster head (CH) among fixed nodes after broadcasting information. Depending on the related positioning and power density, mobile nodes choose their CH. CH receives information from mobile sensor nodes (SNs). Based on the nodes’ velocity and position, the EEPC method computes particle fitness value and chooses the relay nodes. Performance metrics include Throughput, End-to-End Delay, Packet Delivery Ratio (PDR), Quantity of Received Packets, Total Residual Energy, and Total Energy Consumption, network lifetime. The suggested technique enhances network lifetime and reduces energy consumption when compared to other existing protocols. After 200 simulation rounds, the suggested EEPC displays 98.87% PDR. However, during 200 simulation cycles, ANFISRS, ORNS and DTC-ORS show 97.82%, 96.03%, and 89.585% PDR, respectively.
Introduction
Due to their improved monitoring capabilities, WSNs are widely used in a variety of industries. Several routing protocols are currently available, including the LEACH, SPEED, GEAR, and other protocols. Sensor nodes are unable to recharge. As a result, developing an effective and energy-saving routing scheme that both increases network lifetime and system robustness is one of the key objectives of WSNs. APTEEN is the popular clustered routing technique (Adaptive Threshold-sensitive Energy Efficient Sensor Network Protocol). The APTEEN routing system selects CH nodes at random, in a circular fashion. To reduce unnecessary data transfer, APTEEN creates hard and soft thresholds. It can collect data often while still being able to act quickly in emergencies [1]. A revolution in WSNs for monitoring and control applications has been brought about by the advancement of micro-electromechanical systems (MEMS) and radio frequency integrated circuits (RFIC) combined [2].
Wildlife monitoring is an intriguing application for WSNs because it necessitates proper management of motility restrictions and energy-efficient optimal route choice in a constrained energy surrounding. Depending on the target’s position and timing, applications for event monitoring maintain track of it. Endangered animals are protected through target monitoring. The target tracking system becomes hopeless due to the sensor nodes’ insufficient energy. To achieve energy-efficient interaction, extend network lifetime, and optimize resource allocation, recent industry research has been carried out in the area of WSN [3]. These sensors can be connected in different applications that require unsupervised processes to form a WSN. There are numerous applications for WSNs. These sensor nodes can communicate directly with an external BS or with each other, and hundreds or thousands of them are present in WSNs. Multiple sensors allow for more precise sensing over bigger geographic areas [4].
A WSN is a collection of multiple SNs dispersed at random throughout an area. The information is transmitted to a BS (sink) by sensor nodes, which collect data about local occurrences and physical phenomena. Every SN has limited battery life and communication range. Due to the application of these networks, each sensor node’s battery provides all of the necessary energy even though it cannot be recharged or changed. Due to the SNs limited battery life, the energy consumption in these networks presents an important challenge that needs to be reduced to prolong the network lifetime [5].
WSNs can be used for a variety of purposes, such as field monitoring, military activities, and healthcare. A few SNs in certain networks transport data to the sink after gathering information from the monitoring environment [6]. The sensor nodes primarily have low battery capacities, a small range of memory sizes, and low computing capacities. A sensor node’s lifespan is constrained because in essence they are designed to operate in hostile environments and consequently contain an irreplaceable battery [7]. Clustering is a useful method for decreasing SN power consumption in WSNs. Clustering lessens the exchange of duplicate data across SNs by maintaining communication bandwidth [8]. Energy is saved in SNs through the idea of data aggregation at CHs. Clustering is a hierarchical technique it increases the scalability of WSNs [9]. Additionally, load-balancing as well as multi-hop clustering could simply balance energy use at the network level. A node chosen as CH will send substantially more traffic under pressure compared to other common nodes, shortening the network lifetime and causing it to become extinct sooner.
Typically, SNs provide information to CH during clustering, and CH subsequently sends data to BS. Contrarily, CHs close to the BS may use a lot of energy and drain it quickly, which could cause hotspots or energy leaks in the network [10, 11]. Unequal clustering is the potential solution to the hot spot issue, which causes the size of clusters to increase the distance between the BS and CHs to grow and decrease closer to the BS. As intra-cluster energy is used in the clusters that are closest to the BS, the energy balance between the clusters is maintained. Finally, the faraway clusters have a high intra-cluster traffic level [12]. The designed approach has simple sink mobility. The suggested strategy doesn’t optimize sink node mobility. Two mobility-aware clustering algorithms based on three-layered clustering is proposed and Fuzzy C-Means method based gridding at the upper level and mobility-aware distributed clustering at the lower level [33, 34].
In [27] To minimize long-distance interaction between CH and BS, a power-efficient relay chosen technique is proposed using particle swarm optimization. The proposed scheme exhibits limitation of the higher time complexity for the reduced energy consumption. The existing method uses a attribute-based CH Selection method. But in the proposed methodology, to minimize long-distance interaction between CH and BS, a power-efficient relay chosen technique is proposed using improved Grasshopper Optimization algorithm (IGOA). To maintain a fair balance between loads of inter and intra-cluster interaction and lower energy usage, the proposed work makes use of unique CH chosen and uneven clustering using a probabilistic clustering approach. The suggested method uses a probabilistic clustering algorithm, and throughout every round, sensor nodes undertake a probabilistic decision concerning whether or not it would compete to be designated as a CH to enhance network lifetime and reduces energy consumption.
Major contributions of the research: The proposed work aims to decrease energy usage by identifying functional relay nodes utilizing the enhanced energy proficient clustering (EEPC) method. To minimize long-distance interaction between CH and BS, a power-efficient relay chosen technique is proposed using improved Grasshopper Optimization algorithm (IGOA). The number of packets sent during information transfer is decreased by using the sensor data fusion approach and the selected relay nodes. Decentralized sensor data fusion prevents repeating information transfer of packets, which saves energy. To maintain a fair balance between loads of inter and intra-cluster interaction and lower energy usage, the proposed work makes use of unique CH chosen and uneven clustering using a probabilistic clustering approach. The suggested method uses a probabilistic clustering algorithm, and throughout every round, sensor nodes undertake a probabilistic decision concerning whether or not it would compete to be designated as a CH. When there is a link fault, cluster reformation is performed to guarantee link connectivity. Successfully reducing the goal missing rate is the technique for handling link failures.
The design of the suggested system is described in the ensuing sections: The introduction is described in Section I and the background study in section II. In section III, network models are described. In section IV, the suggested Methodology is discussed. In Section V, performance metrics and results analysis are measured. Finally, Section VI completes the work.
Related works
To balance the node’s power usage and prolong the lifetime in WSNs with limited energy, a power clustering technique depends on fuzzy-C means is provided [13]. According to this study, WSNs can save energy by using the Enhanced PSO-Based Clustering Energy Optimization (EPSO-CEO) approach. This approach employs the Particle Swarm Optimization (PSO) algorithm to accomplish clustering and CH selection [14].
In this work, a unique clustering approach that depends on the integration of the MTE (minimal transmission energy) and LEACH (low energy adaptive clustering hierarchy) methods are proposed. Network communication has been optimized by using multi-hop communication in cluster fields rather than direct communication. In WSN, the suggested method offers enhanced energy efficiency and significantly increases network lifetime. But there is still a problem with the increased CH energy consumption [15]. The multilayer route-aware clustering technique (MLRC) is recommended for distributed WSNs. By simultaneously executing cluster formation and routing tree development, the recommended solution prevents the needless generation of routing messages [16].
This study presents a novel distributed clustering technique in which CH is determined by a three-way data interaction among every sensor as well as its neighboring. Sensor degree and residual energy determine whether it qualifies for selection as the CH [17]. The theoretical problems with the unequal clustering approach in uniformly distributed sensor networks are first looked at in this study. It offers a technique for developing an ideal clustering design that will reduce the overall power that is used by every SNs. Additionally, it creates straightforward yet effective distributed methods for energy-conscious CH rotation and routing that guarantee consistent energy utilization across all nodes [18].
It offers a new and trustworthy target tracking method that accounts for both object tracking and protection obligations. The suggested method’s main goal is to guarantee monitoring protection by using a reputation-based trust mechanism for specific SNs. The outcome of the performance evaluation demonstrates that the suggested method enables the network to preserve the dependability of monitoring information in the presence of compromised nodes, leading to a safe and trustworthy object-tracking procedure [19].
A dynamic clustering strategy based on an enhanced Kalman filter and Fisher data matrix is suggested to reduce the overall power consumption of WSNs and choose the appropriate nodes to participate in target detection. The node residual energy is merged based on using data criteria as the selection guideline of nodes in target detection to vote CH nodes and maintain dynamic clustering in this network [20].
To extend the lifespan of the network and save power, it develops the Dynamic Hyper Round Policy (DHRP), a dispersed power clustering strategy for WSNs that organizes clustering operations. A Simple Energy efficient Data Collecting (SEDC) approach is also offered to assess the utility of DHRP and ascertain the end-to-end power usage, even though DHRP is appropriate for any data gathering method that prioritizes power consumption [21]. The optimal relay node selection (ORNS) method, a novel mechanism, is suggested. It identifies two appropriate relay nodes for each collector node according to residual energy, failures frequency, relay node distance, and overall distance to base station. The analytical hierarchical procedure as utilized to weight relay nodes, as well as the Promethee mechanism was employed to outrank them [22].
Relay choosing employing an Adaptive Neural Fuzzy Inference System (ANFISRS) is proposed, whereas the route loss of the channel as well as the residual energy are used as input factors. In attempt to maximize network lifespan as well as Bit Error Rate (BER), ANFISRS establishes a compromise among these two characteristics [23].
This study introduces a new enhanced LEACH protocol approach (LEACH-TLCH) to balance the network’s overall power usage and increase network lifetime. LEACH-TLCH (Two Levels of CHs) protocol increases network longevity and uses less power than LEACH, however, the system faces early CH mortality close to the BS because of increasing network burden in a similar region [24]. The suggested dynamic grouping and neighborhood-building approach is completely decentralized, which reduces the quantity of information that requires to be transmitted. When compared with existing systems like DDEEC and EDDEEC, simulation data shows that the suggested clustering strategy increases network lifetime by 23.6% and 34%, respectively. A barter approach between the lifetime of the network and transference reliability is provided by the suggested architecture, which is further supported by simulation results [25].
It is recommended to use the Differentiated Threshold Configuring joint Optimal Relay Selection (DTC-ORS) methodology, which could drastically cut down on duplicate data routing and ensure WSN delay [26]. Range-based localization algorithms presently in use have significant storage and computation cost in addition to localization latency. A hybrid localization assessment methodology integrating received signal strength (RSS) as well as angle of arrival (AoA) is introduced to tackle these problems these difficulties, with AoA being assessed from the primary anchor (PA) but also RSS being evaluated from a designated sequence of secondary anchors (SAs) [28].
Through the assistance of data aggregation at the boundary router and the usage of a fog simulation framework, the Routing Protocol for Low-Power and Lossy Network (RPL), a universal routing procedure for a stationary atmosphere, is described [29]. Two mobility-aware clustering algorithms based on three-layered clustering is proposed and Fuzzy C-Means method based gridding at the upper level and mobility-aware distributed clustering at the lower level [32–34].
Network model
The fundamental premise for the proposed work is defined by the network model. There are N distinct SNs, some are mobile whereas others are fixed. Nodes with fixed SNs are ones whose positions are constant and never alter. Relay nodes will be chosen from the fixed nodes. In contrast, Mobile nodes can roam across the deployed network and are only capable of acting as cluster members. Battery-powered, heterogeneous SNs with a fixed battery. In the middle of the region to be inspected, BS is surrounded by no energy restrictions. CH election process involves partial SNs, which are static. Each SN is location-aware and has a unique identification.
It is presumed that any SN can communicate within its transmission range. Every SN produces a binary number based on the data it has detected. With a radius of R
s
, the SN encircles the area. If the mobile node is inside the radius R
s
, the optimal SN value is anticipated to be 0; else, this will be 2. The position of the target nodes with the fixed SN determines how they are identified. This could be categorized
Here d denotes the separation between the target and the SN, and R s is the SN’s sensing radius.
The SNs that are fixed in place can use GPS to determine their location. At the start of the tracking time, every SN computes and collects the location information of surrounding nodes to enhance the efficiency of the routing procedure. The network model design, SNs, relay nodes, BS, intra and inter-cluster traffic, and the development of uneven grouping are shown in Fig. 1.
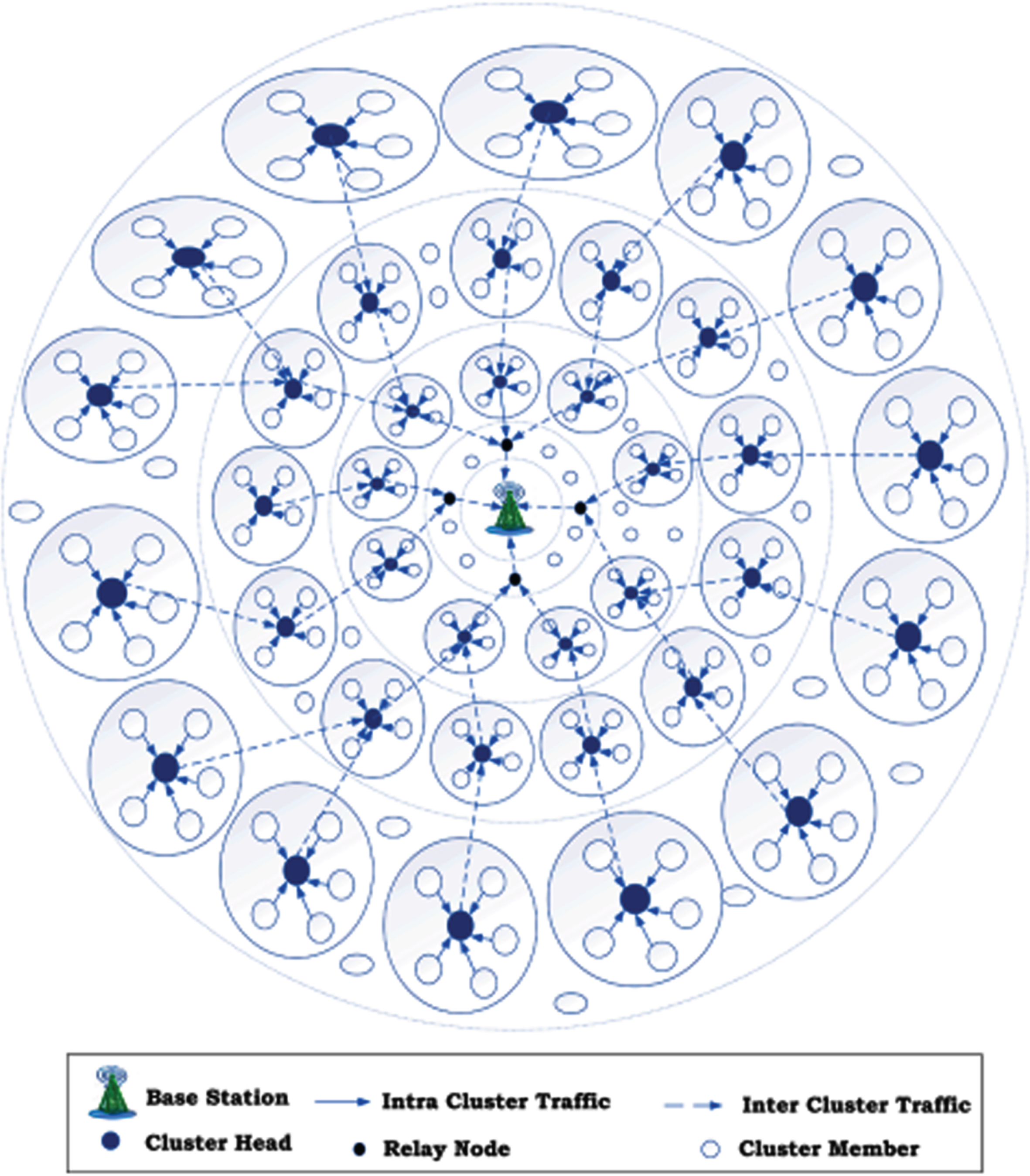
Network model.
The proposed EEPC technique chooses the relay nodes depending on the velocity and position of the relay nodes by computing particle fitness value. The chosen intermediate relay nodes utilize the sensor data fusion approach to send the obtained data to the BS.
Depending on the deviation value, the link failure of static nodes might be anticipated. The suggested method chooses an alternative routing depending on different fixed nodes that serve as relay nodes. Mobile SNs with a high level of energy could act as relay nodes if there are none. The three phases of the proposed work are unequal clustering, relay node detection, and data fusion.
Discovering a neighbor
The fundamental goal of neighbor discovery is to learn additional information about surrounding nodes to forge a solid neighborhood connection throughout the transmission. At this point, every SN transmits a HI message with its network Address. The packets are accepted by SN, which updates its neighbor data in a table to include the node Address, base station separation, and received signal strength indicator (RSSI). To share information about their locations and energy levels, each permanent node and mobile node communicates with other nodes. This stage involves retrieving the node’s ID, its distance from the BS, and its RSSI data.
Unequal clustering and CH selection
The recommended methodology employs a probabilistic clustering process, and throughout every round, sensor nodes undertake a probabilistic decision regarding whether or not it could seek to be designated as a CH. The sensor node that have chosen the choice to strive for becoming a CH initially becomes a tentative CH. This choice is based on a specified threshold T. On the basis of leftover energy, prospective CHs are competing for dominance in local locations.
The competition range (R
comp
), which is estimated by every sensor node and is based on the relative value of the distance among the sensors as well as the BS, is estimated. The network will produce clusters of various sizes depending on this distance. For any node n
i
, the R
comp
is provided by:
The values d max and d min reflect the maximal and lowest distances among the base station (BS) and the sensor nodes, correspondingly. The distance d (n i , BS) among n i and the BS is indicated by the constant factor c, which varies from 0 to 1, while the predetermined maximal competition radius is symbolized by R0.
Every node creates a randomized number that is larger than 0 & lesser than 1, if the number produced falls below the threshold T, the node can become a tentative CH. Thereafter, the CH competition commences. If the residual energy of a tentative CH th i is higher than that of th j and th i receives a “COMPETITION_CH_MSG” from a node th j inside its competition radius, th j concedes up the CH competition and broadcasts a message “QUIT_CH_MSG”. Then, if amongst the tentative CHs in its competition radius, th i has the largest residual energy, it constitutes a CH.
The CHs broadcast the signal “CH_ADV_MSG” over the network once the CH election is completes. Each non-CH node designates the closest CH that does seem to have the maximum received signal power and afterwards transmits a “JOIN_CLUSTER_MSG” message to the CH. The competition range or rather residual energy of a specific sensor node are designated as R comp and res energy , correspondingly. All CHs transmit TDMA messages to allot a time window for their cluster members after the cluster formation procedure has concluded. The setup process is finished and data transmission could begin whenever the cluster nodes were aware of the TDMA scheduling.
The following section defines the threshold value, which is used to choose the CH. Once a CH is selected, it stays until it passes away after a set amount of time. Each node calculates the threshold and assesses whether or not it is selected as a CH. The final threshold value for each node is calculated. The threshold values of each node are contrasted with those of other nodes. The node with the highest threshold value is the cluster head.
Relay selection and Optimal route discovery
It’s crucial to create routes that are optimal for inter-cluster communication. One of the main components of our suggested work is the selection of relay nodes. Relay nodes are added to minimize the cluster head and BS’s long communication distance. Energy is conserved by choosing the best relay nodes, which prevents CH from communicating directly with BS. The suggested technique for effective relay selection and best path design use grasshopper optimization algorithm. Relay choosing in the suggested approach is shown in Fig. 2. The mobile and fixed nodes in the WSN choose the CH by taking into account LQF, energy standard, and distance from other nodes.
According to the suggested method, the movement variation between the clusters can be used to predict a node’s link stability. The suggested EEPC states that WSN sensor nodes act in a self-organized manner.
Start the grasshopper swarm by providing the following parameters: X
i
(i = 1, 2,..., N), c
max
, c
min
, lowest and maximum velocity, highest number of repetitions T. Find the ideal grasshopper
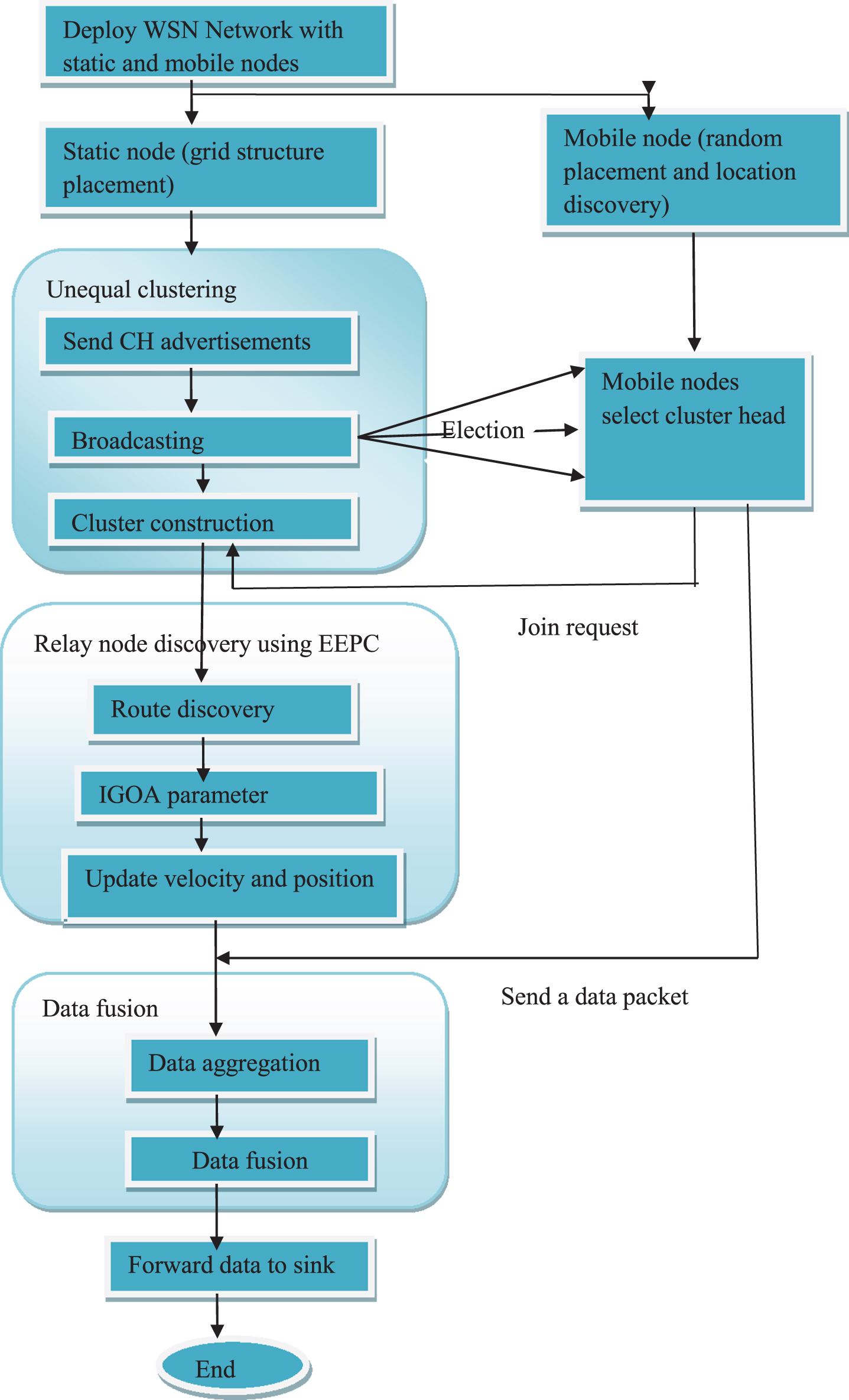
Proposed work flow.
X
i
, S
i
, G
i
, and A
i
stand for the positioning, social interactions, gravity force, and wind scattering of the i
th
grasshopper, correspondingly, in the mathematical framework employed to simulate the activity of grasshopper swarms.
Before adopting the chosen probability p, the distance among each grasshopper is first projected into the interval. Equation (9) is used to update the grasshopper’s positioning if p < 0.5. The revised position of the grasshopper has been determined employing the gravitational constant g as well as the unit vector from the i th to the j th grasshopper.
If the grasshopper’s position is outside of the bounds, the upper bound and lower bound are employed to modify the grasshopper’s position. Throughout the hunt, the i
th
grasshopper’s velocity allows its position to fluctuate as indicated.
The attenuation of the signal fluctuates according to the deviation value, which has an impact on the RSSI indicator’s value. The following equation can be used to determine how far away CH is from the mobile nodes.
Here P - transmit power, G - antenna gain, d - the separation between the source and current nodes, and PL(d) - receiving node route loss. Equation (11) is used to derive PL(d). It can calculate the d as follows using Equation (11).
Where, d0- Optimal distance (2 m), X σ -Gaussian distribution variance (default value = 4)
If several intermediate nodes are suitable, the optimal relay node is chosen based on the maximum value of the fitness function. The suggested strategy’s level of complexity is O (n).
Sensor data fusion is a method that collects and combines information from various SNs, it is more effective and could produce precise results than using a single source. Videos and graphics are used to represent the detected data, which requires additional storage and delays transmission to the BS. The gathered data is transferred to the BS via relay nodes to address the SN’s low battery power issue. A WSN’s nodes can send and receive data from sensors. Decentralized data fusion is the method used to combine the data. For the sensor data fusion technique, each node is required to collect both information that is sent by surrounding nodes and information that is self-monitored. Distributed deployment is used to implement this strategy. Fusion or universal decision-making does not require a centralized node.
In the proposed study, the sensor nodes are tracked using a track-by-track fusion technique. The suggested decentralized technique, however, solely addresses the communication of sensing data. As a result, data fusion requires less effort and is less complicated. The several forms of sensor fusion techniques include cooperative, redundant, and complementary forms. Sensors that can be integrated to produce a precise representation of the observed data but are not directly dependent on one another are the subject of complementary sensor data fusion.
The independence of Sensors 1 (R1) and Sensor 2 (R2) is clearly shown in Fig. 3. Data (a) and (b) show the events that were detected by each of the sensors. A comparable full set of information (c + d) could be obtained by combining these two sets of data. Two sensors, R1 and R2, provided data that was used to produce the final product. As a result, the problem of incomplete information can be solved. The identical mobile node can be observed by the two different SNs. The combined vision of two independent sensors is added using complementary data fusion. If information is provided by two or more independent sources, it is combined to increase the associated trust.
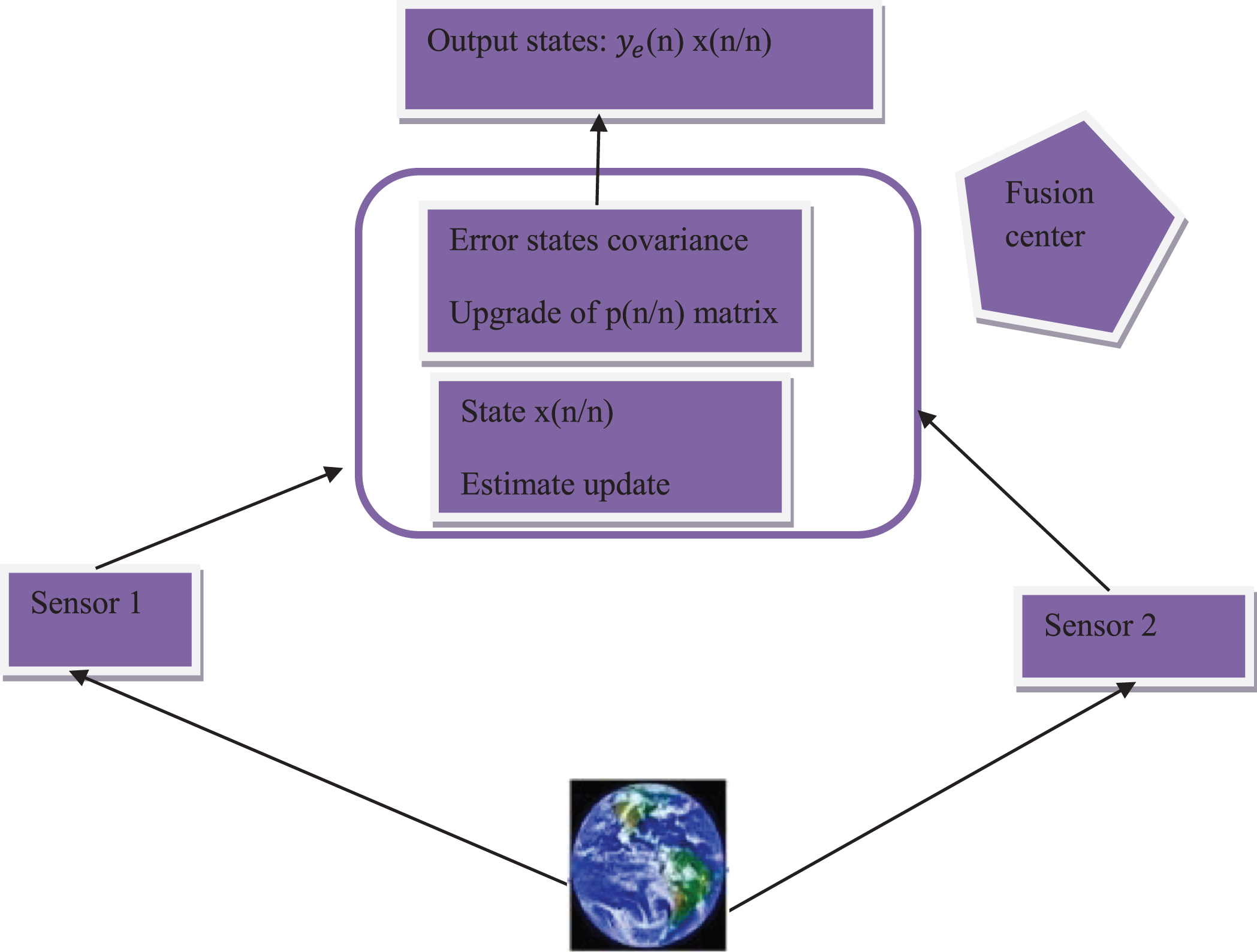
Complementary data fusion.
The Kalman filter (KF) is utilized in the proposed work to implement complementary data fusion. The goal is to determine the optimal innovation KF gain G(n) value for the filtering.
Innovation KF Gain:
The following equations lead to complementary resulting information.
By calculating the residual formula, each KF operates.
The state vector is computed using
Upgrade Error Covariance
Estimated Filter Output
Error Covariance
State time upgrade at this moment
Upgrade Error Covariance
Here, G(n)=Gain, n - distinct time, C - monitoring vector, A - matrix of state transitions, B - input vector for coupling, x - vector of state, Y v (n) - observation of plants, v(n)- noise from sensors or observations, w(n) - process noise, Q - matrix of process noise covariance, R - Covariance matrix for observational noise.
Figure 4 depicts the cluster reformation in link fault detection. A significant frequency of network failures affects the mobile node-tracking scenario. The connection fault is visible when the mobile nodes leave the radio range and cannot be detected. If a link fails, an alternative routing path is found. Let (X x , Y y ) denote the precise position of SNj as determined by the localization method. According to Equation 21, Nodej determines the deviation PL(d).
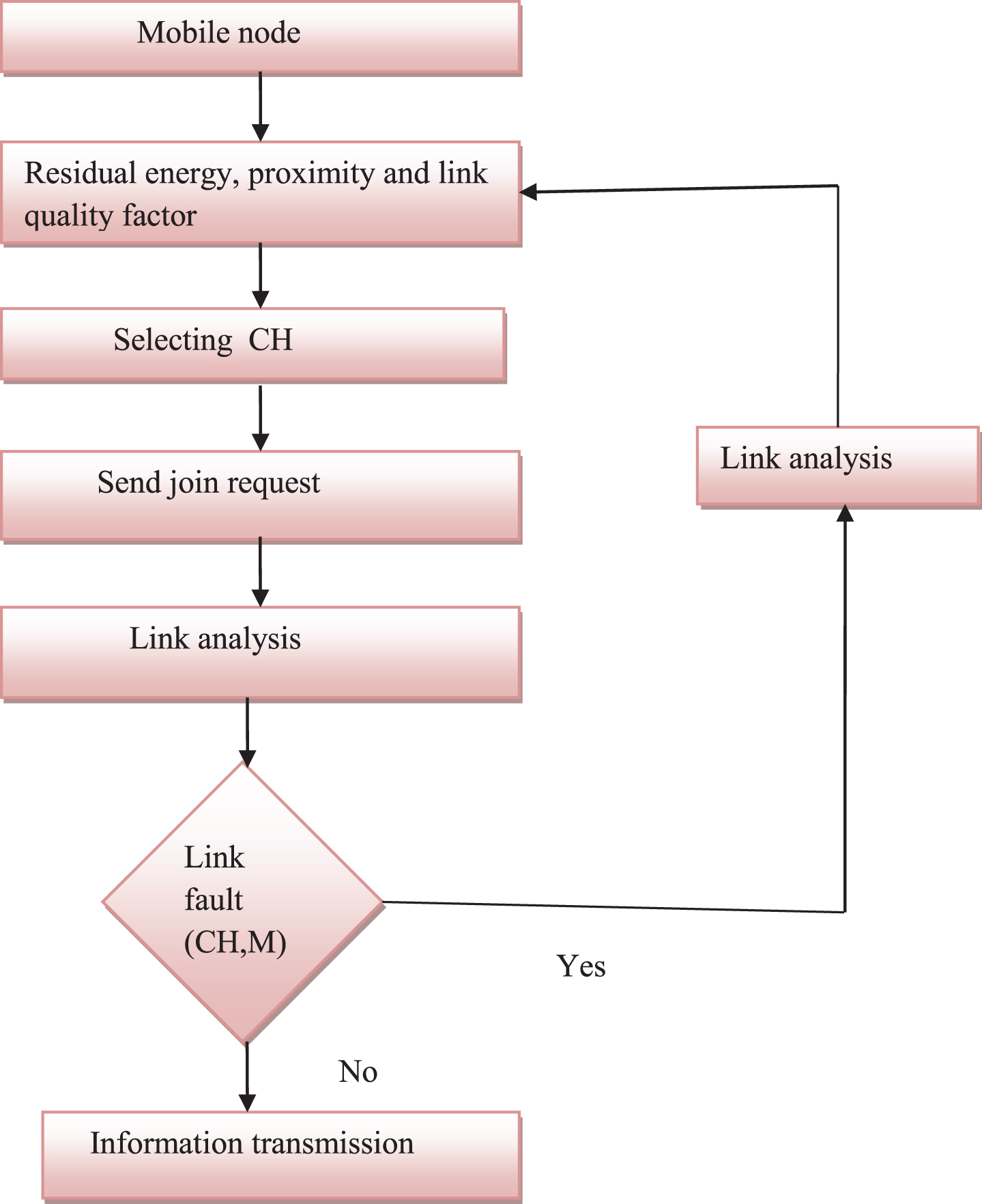
Cluster reformation in link fault condition.
Formula (21) can be used to determine the deviation of an SN at a time interval T i . The node’s position and the speed at which it exits the radio range are used to predict the link failure. A mobile SN’s deviation will exceed the threshold limit, which indicates that the link will break. In this case, it is impossible to find the node and determine that the link is faulty because it has left its range and is not covered by any other SNs. The typical wireless radio communication range is 260 meters.
As illustrated in Fig. 4, the node automatically begins to locate its CH to reform its link if the determined deviation range becomes close to 150 m. The suggested method decreases energy usage in each phase, including data fusion, relay node selection, optimal path selection, and CH selection. As a result, the network lifespan is prolonged and the number of active nodes rises. As a result, this method of handling link faults or failures effectively lowers the goal missing rate.
A hundred nodes are used to create the simulation network architecture, including both fixed and mobile nodes. There are 65 mobile nodes and 37 fixed nodes in it. The mobile nodes, also known as dynamic sensors, are positioned inside the non-moving constructions where the permanent nodes are situated. The link is built utilizing IEEE 803.12P MAC protocol. The mobile nodes gather data about the surrounding area and the action being tracked. The information gathered is subsequently sent to fixed nodes. 2000 m×2000 m is the size of the simulation coverage area. The simulation period is 50 seconds.
The 1000 m x 1000 m simulation coverage area. The simulation duration equals 100 s. The preliminary energy of nodes is 10 J, queue length given as 50, and data rate seems to be 256–512 kbps. The maximal sensing radius being estimated 20 m, the transmission capacity of SNs 250 m. Sensing power as well as receiving power were 0.10 W and 0.25 W.
Performance evaluation
The NS-2 program has been used to run numerous simulations to assess the viability of the suggested EEPC technique [24]. Mobile sensing tracking is used to evaluate EEPC’s performance, and it is comparable to ORNS [22], DTC-ORS [26], and ANFISRS [23]. A number of performance measures are used to assess the proposed EEPC’s performance.
Number of packets received
The quantity of packets received by the proposed EEPC, the existing LEACH, IPSO, and EHO-GA at BS are shown in Fig. 5. The amount of simulation rounds is represented on the X-axis, while the quantity of packets received is indicated on the Y-axis.
The graph that follows shows that the suggested methodology produces more combined packets than alternative methods already in use. After 200 simulation rounds, the suggested EEPC generates 1685 messages. Unfortunately, EHO-GA only gets 1556 packets after 200 rounds. Data fusion allows the proposed EEPC to generate 7.72 % more packets than EHO-GA. After 200 simulation rounds, the IPSO and LEACH receive 1522 and 1253 packets, respectively. In comparison to IPSO and LEACH, the suggested EEPC produces 9.58 % and 24.64 % more packets at BS, respectively.
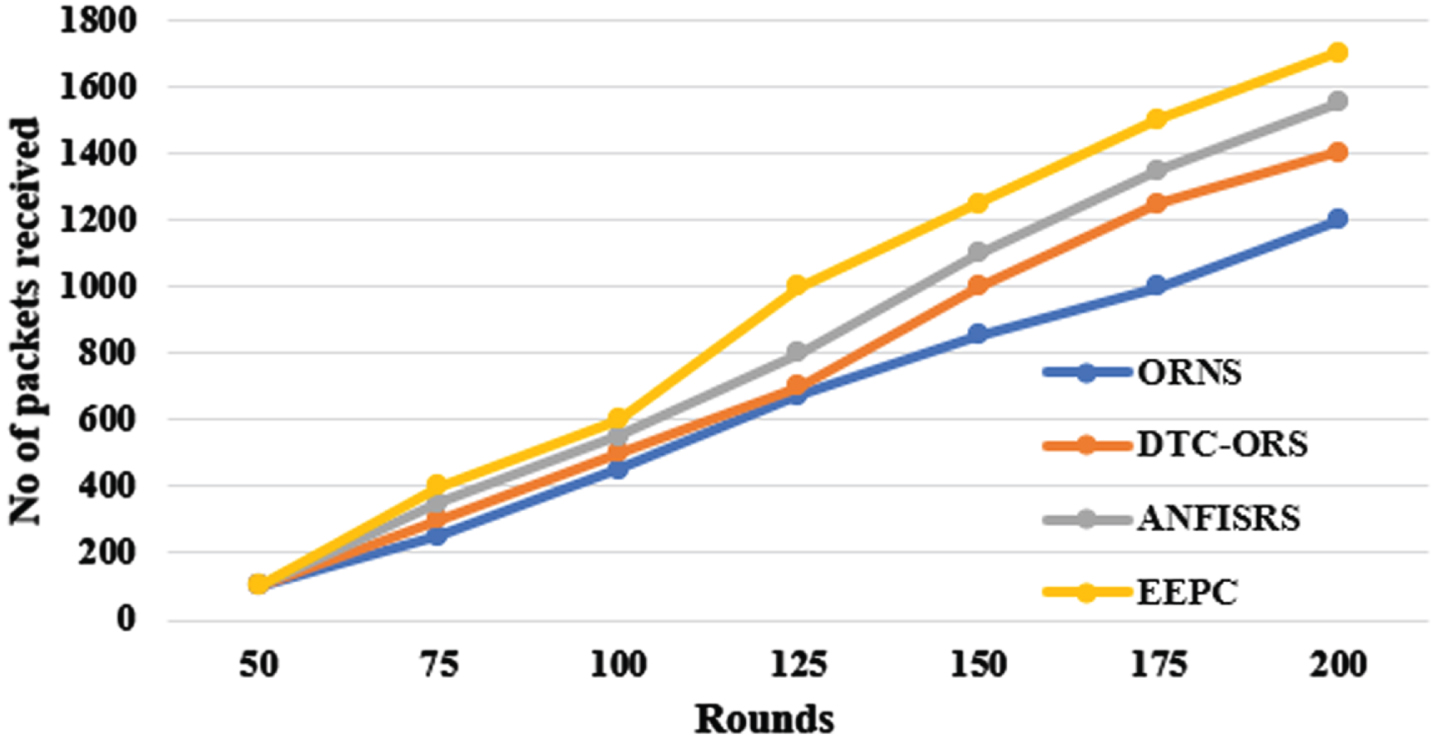
Number of received packets.
It is the amount of time it takes for packets to move from one source to another and arrive at the receiving end. Sent data is integrated using a sensor data fusion approach at the cluster head during a target detection occurrence. After receiving the fused data, the relay nodes transmit it to the BS.
The source is a mobile SN, and the base station is the final destination. End-to-end latency for suggested and existing techniques is shown in Fig. 6. Additionally, it has been discovered that as the quantity of rounds rises, the end-to-end delay in the suggested EEPC remains constant. After 200 cycles, the suggested EEPC displays an end-to-end delay of 0.0141 ms. EHO-GA and IPSO display 0.03 ms. End-to-end delay is decreased by 24% in the suggested EEPC when compared to the existing EHO-GA and IPSO.
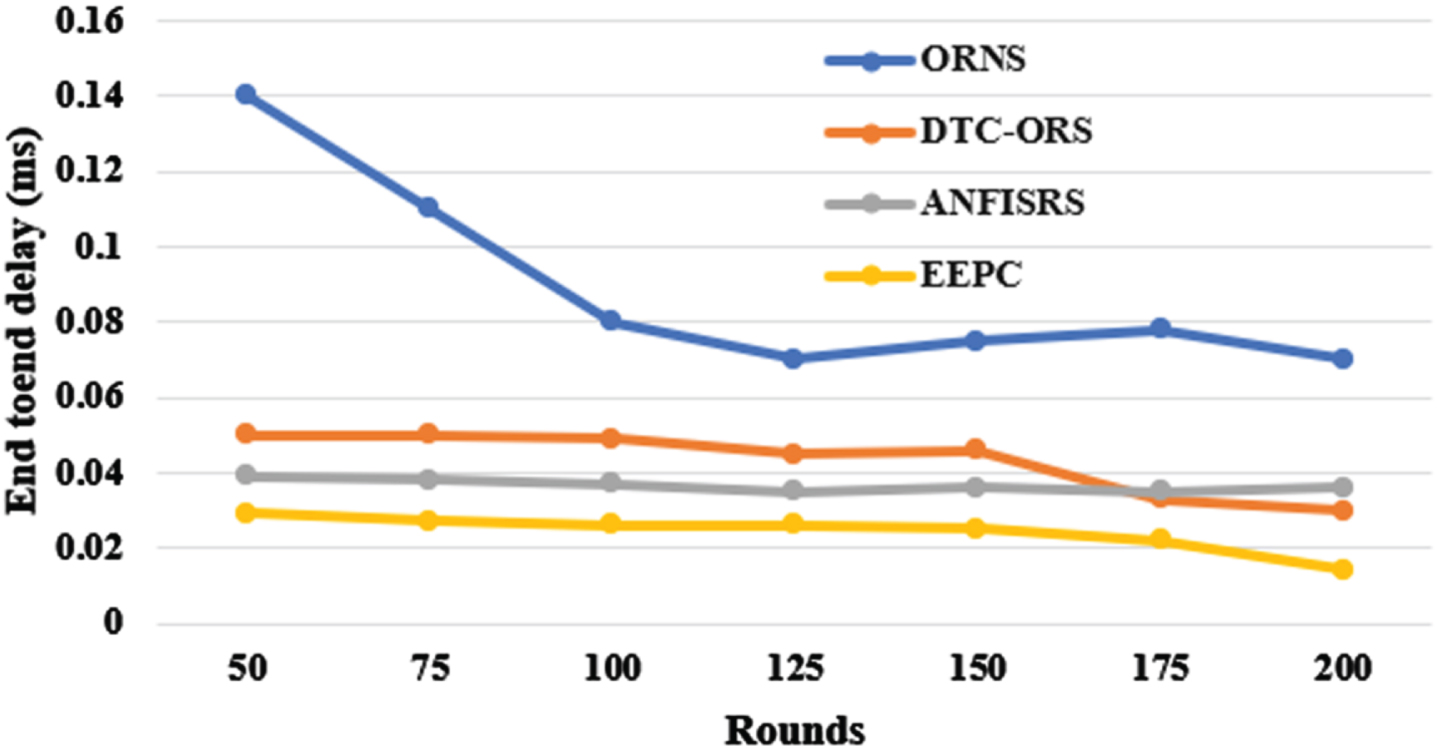
End-to-End delay.
The total number of transmitted packets, it is the proportion of sent messages that are missed. It occurs as a result of the faulty node behavior that has been compromised, which causes it to drop all or some of the packets that need to be sent. Packet loss and dropping is a prevalent issue in WSN that decreases the packet delivery ratio. Multipath dropping, which causes signal deterioration in the medium, might be the cause.
Figure 7 shows the ratio of dropped packets for both suggested and existing approaches. The suggested EEPC is estimated to have a packet-losing ratio of 0.0241 after 200 rounds. However, packet dropping ratios for other existing algorithms EHO-GA, IPSO, and LEACH are 0.026, 0.05, and 0.083, respectively. Beginning of the initial simulation cycle through the end of the 200th, the suggested EEPC functions properly.
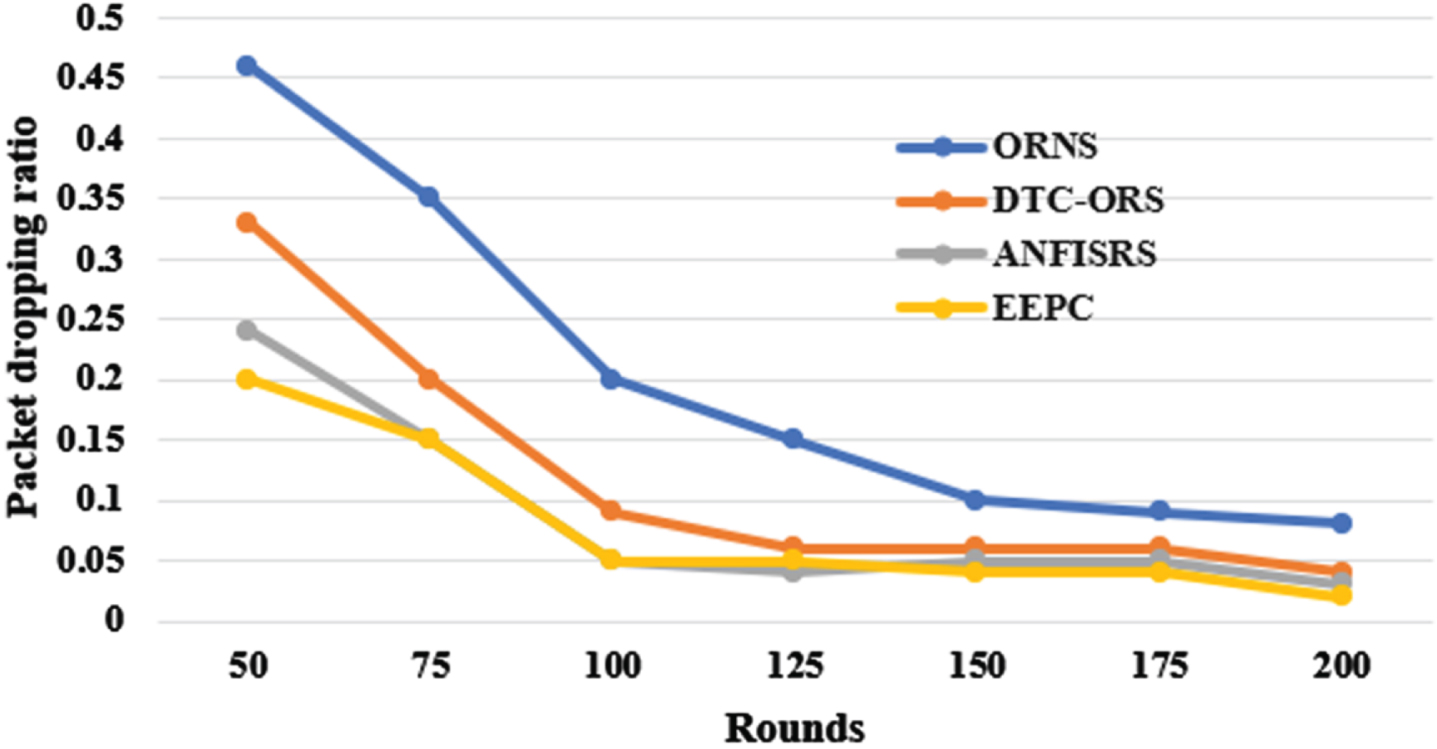
Packet dropping ratio.
The ratio of total packet sums transmitted to total packet sums received, is known as the packet delivery ratio. Age percent is used to represent it.
Temporal information is used in event tracking. The tracking method would also have a large packet delivery ratio to operate well. The PDR is shown in Fig. 8 for both the suggested EEPC and the already being used technique. The findings show that the PDR of the suggested EEPC is higher than that of other existing techniques. The suggested EEPC shows 98.87 % PDR after 200 simulation iterations. However, during 200 simulation cycles, EHO-GA, IPSO, and LEACH show 97.82%, 96.03%, and 89.585% PDR, respectively.
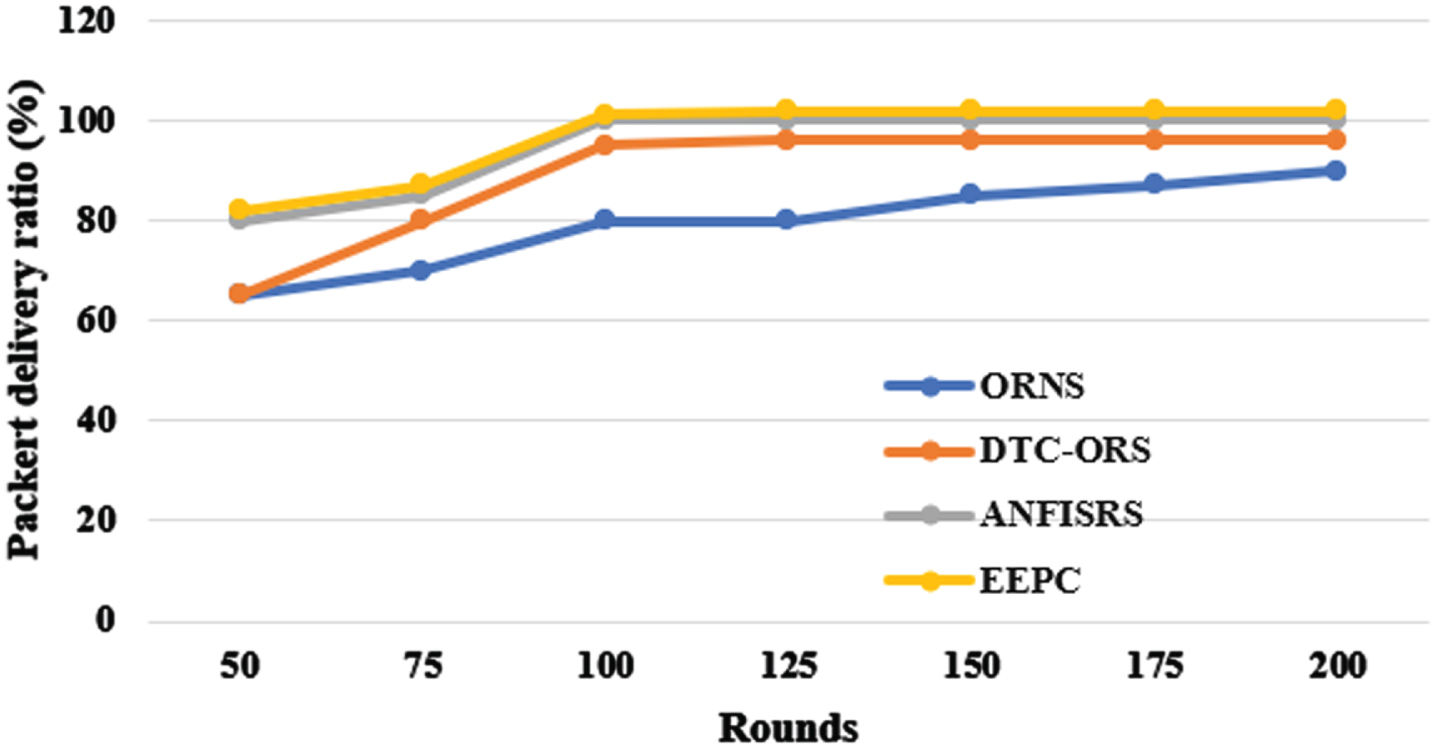
Packet delivery ratio.
The amount of information packets transmitted to the endpoint terminus during the whole test session is known as throughput. It is said that
As a result, throughput metrics are important. The throughput of suggested and existing approaches is shown in Fig. 9. The amount of rounds is shown on the X-axis of the graph, and throughput is shown on the Y-axis in seconds of bits. In comparison to the other strategies, the existing LEACH technique gives a minimum throughput of 33,400 bits per second after 200 simulation rounds. In a recent simulation round, the IPSO, EHO-GA, and proposed EEPC demonstrate 39,437, 40,220, and 45,840 bits per second, respectively. In comparison to EHO-GA, the suggested EEPC delivers a throughput value that is 13% higher. The energy depletion limitation is eased and the proposed EEPC’s total throughput is increased through the dynamically chosen CH and relay nodes.
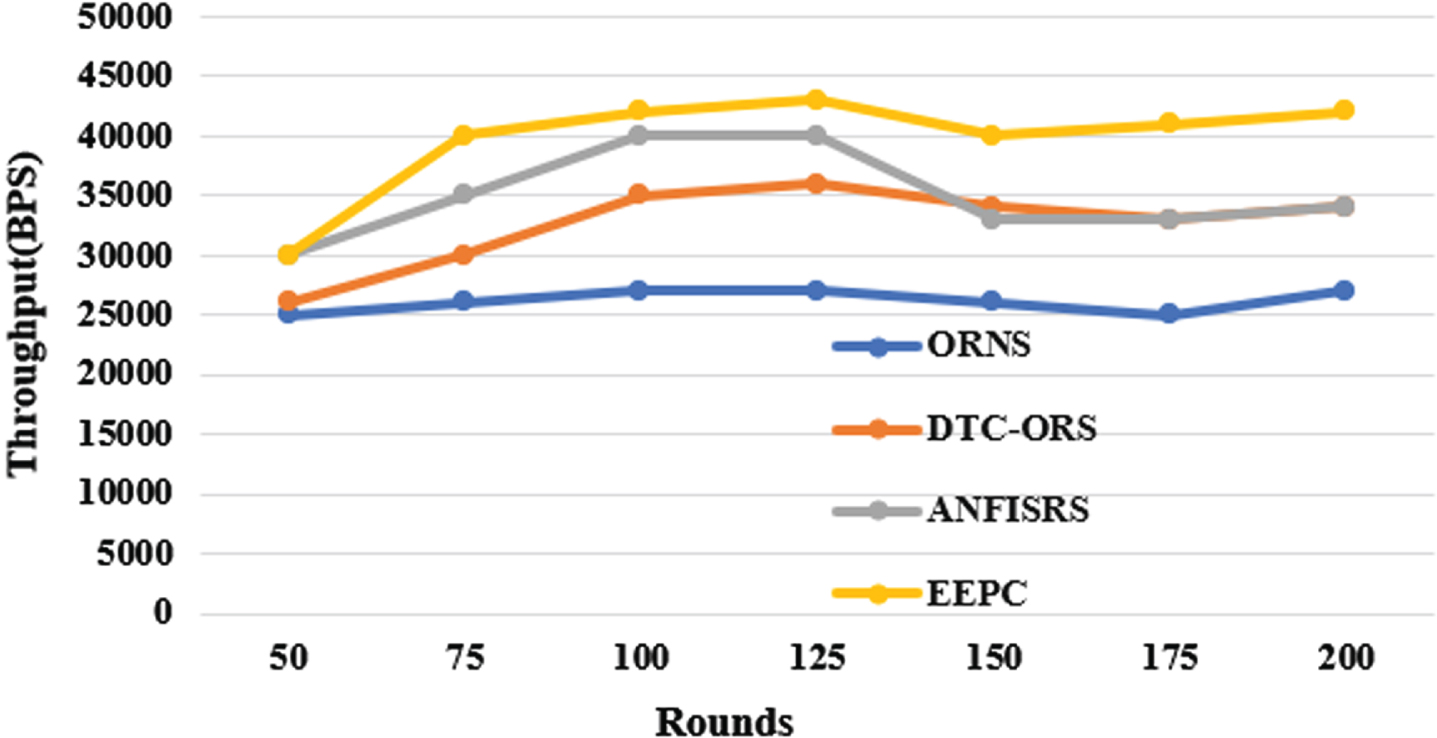
Throughput.
It is defined as the overall energy consumed by every SNs in the channel for packet transmission during the simulative period.
Figure 10 depicts the energy usage of the suggested and existing EEPC methods. The suggested EEPC is estimated to have an overall energy consumption of 67% after 500 rotations. However, it was found that of the total energy, LEACH consumed 91%, IPSO consumed 77%, and EHO-GA consumed 74%. Compared to LEACH, IPSO, and EHO-GA, the suggested EEPC algorithm used 21%, 11%, and 9% less total energy, respectively. The major issue in the WSN environment is limited battery capacity, and the suggested EEPC uses relatively little energy while also increasing the lifetime of sensors.
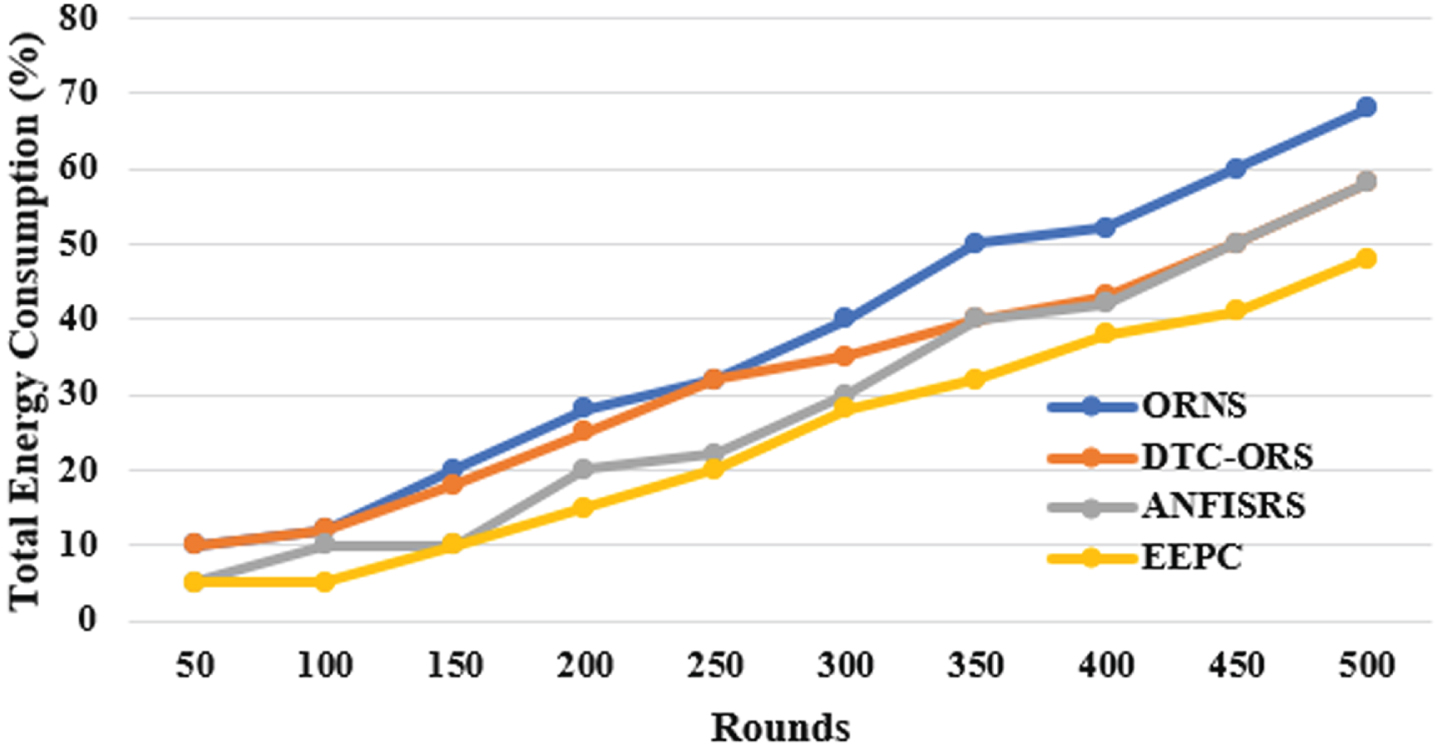
Total energy consumption.
WSN network lifetime is measured by total residual energy. The network lifetime is increased, thus it would be improved to the greatest extent possible.
The overall residual energy of the recommended EEPC and the existing techniques are shown in Fig. 11. The algorithms are evaluated over 700 test iterations to establish the overall residual energy level. After 500 simulation cycles, it is found that for LEACH, IPSO, and EHO-GA, the total residual energy is 16%, 27%, and 43%, respectively. The suggested EEPC, however, predicts a 49% residual energy after 500 rounds. After 500 simulation cycles, it outperforms all other methods and has total residual energy that is 5% larger than the EHO-GA approach. At the end of the 650 simulations, the suggested EEPC protocol extends the network lifetime.
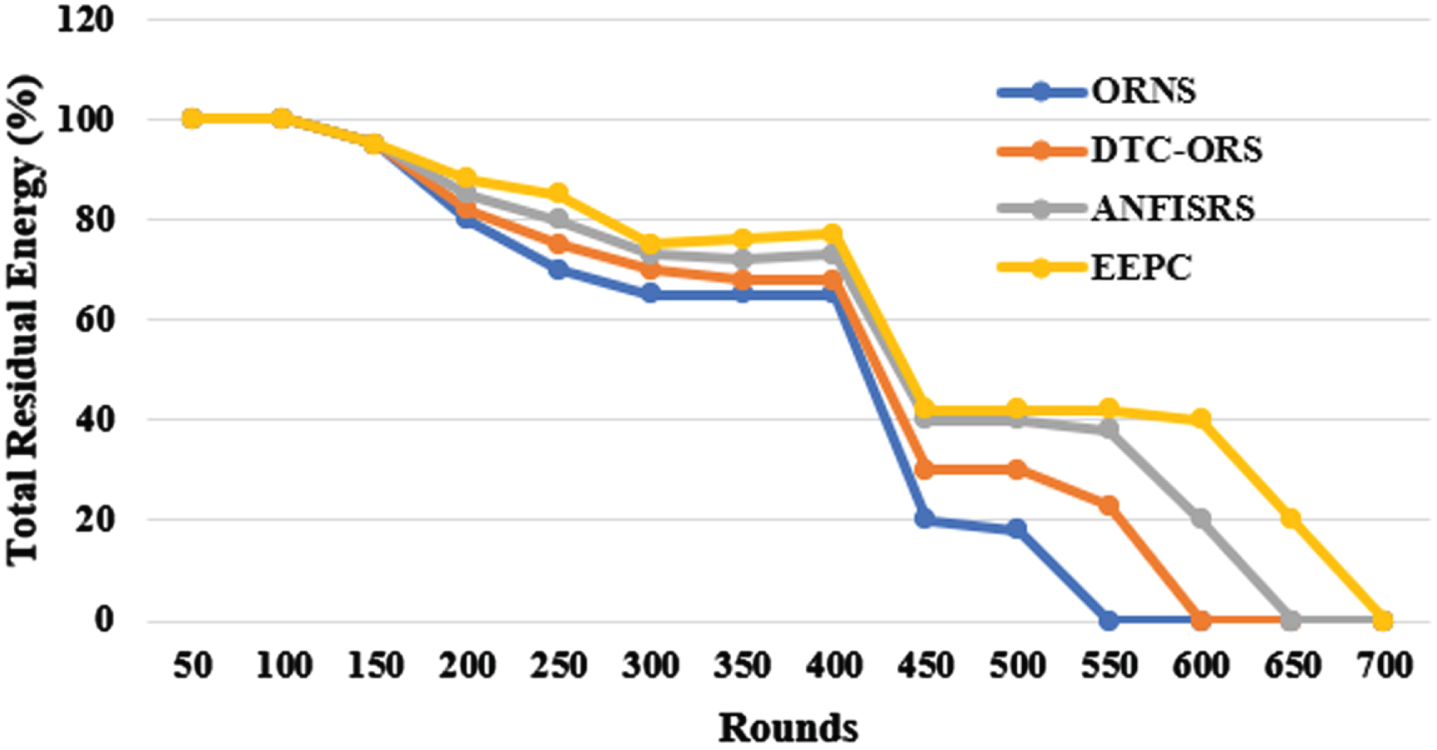
Total residual energy.
The number of live nodes should be maximized in an efficient event-tracking system. Figure 13 displays the quantity of active nodes for the proposed and existing strategies. All methods maintained the same number of nodes alive for up to 300 cycles. The existing ORNS approach then produces a substantially lesser quantity of residing nodes than previous alternatives. By the 500th round, every single node has been lost. There are no longer anymore active nodes in the 650th round of ANFISRS as well as the 600th round of DTC-ORS, respectively. The number of living nodes under the proposed EEPC has increased by 13% as compared to ANFISRS. The number of alive nodes decreases as energy degrades throughout the course of the simulation rounds. The ratio of surviving SNs to total SNs determines the amount of residual energy. The suggested EEPC approach uses less energy during the entire processing cycle and extends the network lifetime.
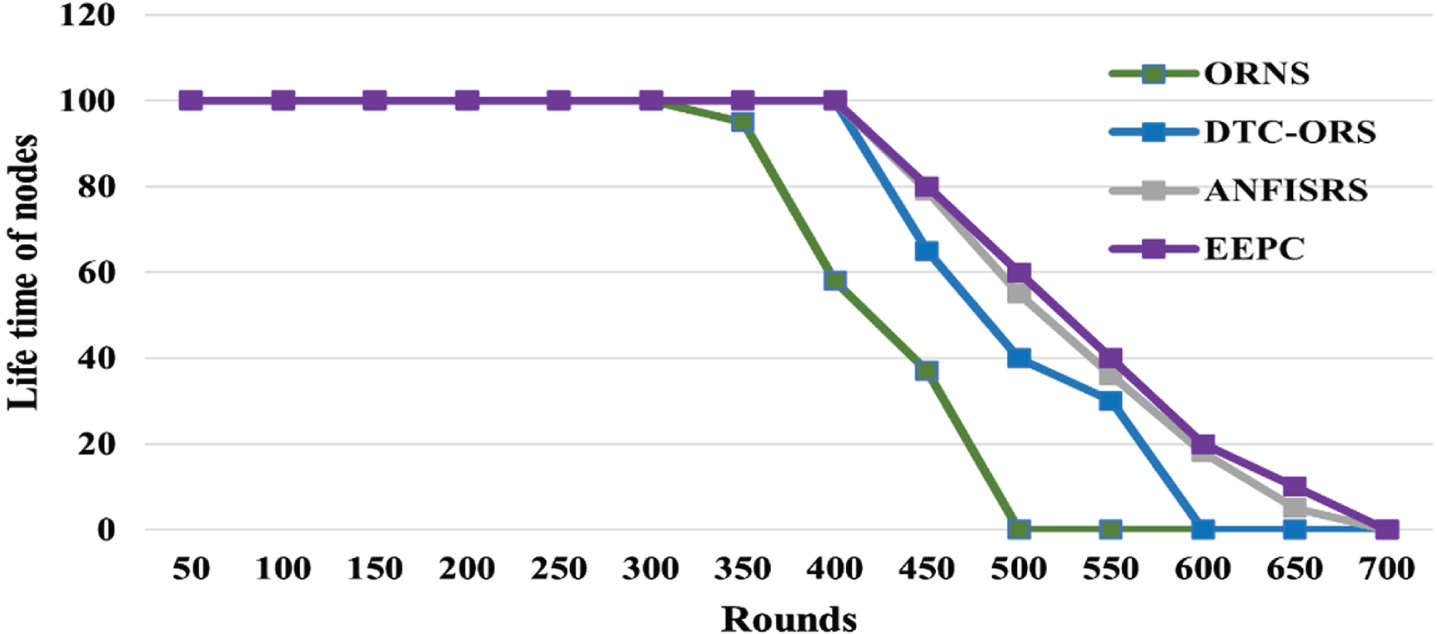
Network Lifetime.
In this study, an Enhanced Energy Proficient Clustering (EEPC) method is suggested to enhance the network route during information transfer while taking into account the dynamic nature of SNs. Increasing monitoring and tracking activities in the WSN surrounding and extending the lifespan of sensor networks are the main goals of this work. This study developed a clustering technique for WSNs that uses less energy and increases network longevity. Extensive simulations show that the suggested EEPC improves mobile node energy efficacy and tracking precision. The sensor data fusion approach increases the overall lifespan of the SNs. Some of the performance criteria that are evaluated include throughput, packet delivery ratio, a quantity of received packets, end-to-end delay, packet dropping ratio, total residual energy, and total energy consumption. The suggested EEPC extends network longevity and decreases energy depletion compared to other existing protocols. The suggested EEPC shows 98.87% PDR after 200 simulation iterations. However, during 200 simulation cycles, EHO-GA, IPSO, and LEACH show 97.82%, 96.03%, and 89.585% PDR, respectively. The authors want to use actual test beds/ hardware to develop the EEPC algorithm in the future. Whenever a node dies, the network’s ability to communicate is maintained by the installation of new nodes. The approach additional data fusion algorithms will be researched, and the investigation of the dynamic insertion of new nodes will take place.