
Abstract
Multiple unmanned aerial vehicles (multi-UAVs) formation shape refers to the geometric shape when multi-UAVs fly in formation and describes their relative positions. It plays a necessary role in multi-UAVs collaboration to improve performance, avoid collision, and provide reference for control. This study aims to determine the most appropriate multi-UAVs formation shape in a specific mission to meet different and even conflicting requirements. The proposed approach introduces requirement satisfaction and spherical fuzzy analytic network process (SFANP) to improve the technique for order preference by similarity to ideal solution (TOPSIS). First, multi-UAVs capability criteria and their evaluation models are constructed. Next, performance data are transformed into requirement satisfaction of capability and unified into a same scale. Qualitative judgments are made and quantified based on spherical fuzzy sets and nonlinear transformation functions are developed for benefit, cost, and interval metrics. Then, SFANP is used to handle interrelationships among criteria and determine their global weights, which takes decision vagueness and hesitancy into account and extends decision-makers’ preference domain onto a spherical surface. Finally, alternative formation shapes are ranked by their distances to the positive and negative ideal solution according to the TOPSIS. Furthermore, a case study of 9 UAVs performing a search-attack mission is set up to illustrate the proposed approach, and a comparative analysis is conducted to verify the applicability and credibility.
Keywords
Introduction
Unmanned aerial vehicles (UAVs) are gaining in popularity for their advantages of low risk, low cost, and long endurance. Multiple UAVs (multi-UAVs) have been widely deployed as a cooperative formation to perform complicated military and civilian missions, such as target tracking [1], search and rescue [2], data collection [3], and search-attack [4]. This formation typically has a geometric shape to improve performance and avoid collisions [5]. For example, a V-shaped formation can reduce energy consumption during flight [6] and a straight-line formation can be used to navigate through valleys or obstacles [7, 8]. A clearly defined formation shape also describes relative positions of each UAV and is the assumption and goal of multi-UAVs formation control studies. Square formation [9], circular formation [10], and triangular formation [11, 12] have been taken as target states to verify the efficiency and stability of formation keeping methods. [13] conducted simulations of reconfiguration from triangular formation to V-shaped or diamond formation after loss of UAVs. Formation shapes have also been adopted in field flight. [14] conducted 21-UAV flight experiments and performed formation maintaining and reconfiguration with triangular, V-shaped, and linear patterns. [15] took linear, circular, and triangular formations in a 10-UAV flight test for cooperative trajectory planning.
Although researchers have proposed such a variety of formation shapes, rare studies have been conducted on how to choose the most appropriate formation shape for multi-UAVs under different or even conflicting requirements, which plays a fundamental role in maximizing overall mission effectiveness. As determination of multi-UAVs formation shape is affected by many factors, such as tracking target performance [16], aerodynamic efficiency [17], and power consumption [18], it is a typical multi-criteria decision-making (MCDM) problem which needs to evaluate alternatives considering multiple criteria. Among various MCDM approaches, the technique for order preference by similarity to ideal solution (TOPSIS) is widely used because of its simple and rational concept that the optimal alternative is the closest to the positive ideal solution and simultaneously the farthest from the negative ideal solution [19]. TOPSIS is also easy to implement and has no strict limitations on data distribution or size. Despite its simplicity and computational efficiency, some issues remain in traditional TOPSIS when scaling the relative performance of each alternative formation shape under multiple criteria:
Classical TOPSIS requires all performance values of criteria to be numerical [20]. However, when determining the formation shape of multi-UAVs, some evaluations may not be expressed quantitatively and rely on the experience and knowledge of experts to make judgments. Therefore, subjective and objective evaluations should be discussed under the same scale. In classical TOPSIS, only benefit and cost criteria are considered, which is obviously insufficient to capture all numerical metrics in multi-UAVs missions. Moreover, TOPSIS usually applies a linear min-max normalization to the initial data to make criteria in different units comparable [21]. However, this normalization does not handle outliers well and fails to address mission requirements. Assigning reliable weights to each criterion is a prerequisite for obtaining unbiased ranking results through TOPSIS. However, the criteria measuring different multi-UAVs formation shapes interact with each other. For example, formations with poor communications will have difficulty conducting coordinated search and coordinated attack; formations that can successfully jam enemy radars will have better survivability. These net-like interdependencies create difficulties in determining the weights of the criteria.
The user’s need for a complex system, such as multi-UAVs, to achieve desired objectives is often expressed as multiple capability requirements. Thus, requirement satisfaction of the capability describes the extent to which multi-UAVs accomplish their mission. This satisfaction reveals the gap between the inherent characteristics and expectations, offering a perspective for unifying subjective and objective evaluations and allowing more types of metrics to be considered. Moreover, the characteristics with crisp values are usually transformed into requirement satisfaction non-linearly. This enables a better handling of data with different distributions and ranges, and emphasizes the relationship between alternative formation shapes and mission requirements.
To rationally and reliably assign relative weights of interdependent criteria, combining with the analytic network process (ANP) is a common improvement to TOPSIS in the literature [22–24]. The ANP characterizes interdependent criteria as a network of influences, and determines their global weights through pairwise comparisons and matrix calculations. Although the ANP is naturally suited to deal with net-like criteria structure and has the advantages of simplicity and flexibility, it relies heavily on subjective judgments that experts may not be able to rate precisely in some cases due to their experience and knowledge limitations. There is some literature that applies fuzzy set theory to capture uncertainty in ANP and integrates it with TOPSIS [25–27]. However, these fuzzy extensions usually only represent experts’ opinions as a simple “yes” or “no”. In practical judgment, experts may also abstain or hesitate which is beyond the scope of these fuzzy representations [28].
First proposed in [29], spherical fuzzy sets (SFSs) represent experts’ opinions with the degree of membership, non-membership, and hesitancy, which extends the preference domain to a three-dimensional spherical surface and is more suitable for practical decision-making when abstention or hesitancy is involved [30]. SFSs provide a better way to handle uncertainties in ANP, and can also be used to represent qualitative judgments when evaluating requirement satisfaction for some characteristics of formation shape.
In this paper, a requirement satisfaction and spherical fuzzy ANP (SFANP) based TOPSIS approach for multi-UAVs formation shape determination is developed. First, capability criteria and corresponding evaluations of multi-UAVs are constructed. Second, requirement satisfaction of capability is introduced to unify quantitative metrics and qualitative judgments on the same scale. Qualitative judgments are made and quantified based on spherical fuzzy sets. Interval criteria are brought into consideration for other quantitative metrics, and nonlinear transformation functions are designed to replace min-max normalization. Third, we deploy SFANP to weight criteria with interrelationships, which considers uncertainty and hesitancy of decision-makers. Alternative formation shapes are then ranked by TOPSIS. Furthermore, a case study of a search-attack mission with comparative analysis is conducted to verify the applicability of the proposed approach.
The rest part of this paper is organized as follows. Section 2 gives a literature review. Section 3 presents preliminary definitions of spherical fuzzy sets and related operations. Section 4 describes the proposed approach. Section 5 conducts a case study on multi-UAVs performing search-attack mission. Conclusions and prospects for future research are given in Section 6.
Literature review
Most of existing studies investigating the influence of different formation shapes on multi-UAVs performance are limited to a single indicator. [16] evaluated the performance of following, triangular, and circular formations on tracking malicious UAVs. [17] performed computational fluid dynamics simulations to assess the total drag for echelon, V-shaped, diamond, and half-diamond formation flight of blended-wing UAVs. [18] compared power consumption between V-shaped formation and circular formation considering aerodynamic efficiency and beamforming communication. [31] explored the effect of column, front, echelon, V-shaped, and diamond formation of quadcopter drones on the energy consumptions.
Depending on the type of characteristics, the degree of requirement satisfaction can be obtained through either experts’ opinions or crisp values. In [32, 33], experts’ assessments were quantified based on fuzzy sets, and the satisfaction degrees of capability requirements were represented through membership functions. In [34], basic uncertain linguistic information was proposed to express performance assessment of experts, and the value function of prospect theory was introduced to calculate the satisfaction level of each requirement. Regarding characteristics or attributes with crisp values, [35] has pointed out that they do not translate linearly into requirement satisfaction. A rule-based transforming method was applied in [36], but it only generated discrete satisfaction grades. [37] used a continuous sigmoid function to model user satisfaction for routers. In [38], a sigmoid-like satisfaction function was constructed based on unimodal and multi-peak distributions. Although sigmoid-like function is an effective way to describe the relationship between numerical characteristic and requirement satisfaction, its expression is rather complex and has a step at the boundary.
The combination of ANP and TOPSIS has been employed to solve many MCDM problems, where the ANP was often extended with different fuzzy sets. Figure 1 shows the commonly used fuzzy representations for handling uncertainty in subjective comparisons in studies combining fuzzy ANP and TOPSIS from 2014 to 2023, and Table 1 summarizes some of them. Although these publications have considered uncertainty of experts’ opinions when dealing with interdependent criteria through ANP, most of them were conducted on a one-dimensional preference domain. Researchers are trying to extend preference domain to meet practical needs, but very few have handled the degree of hesitation.
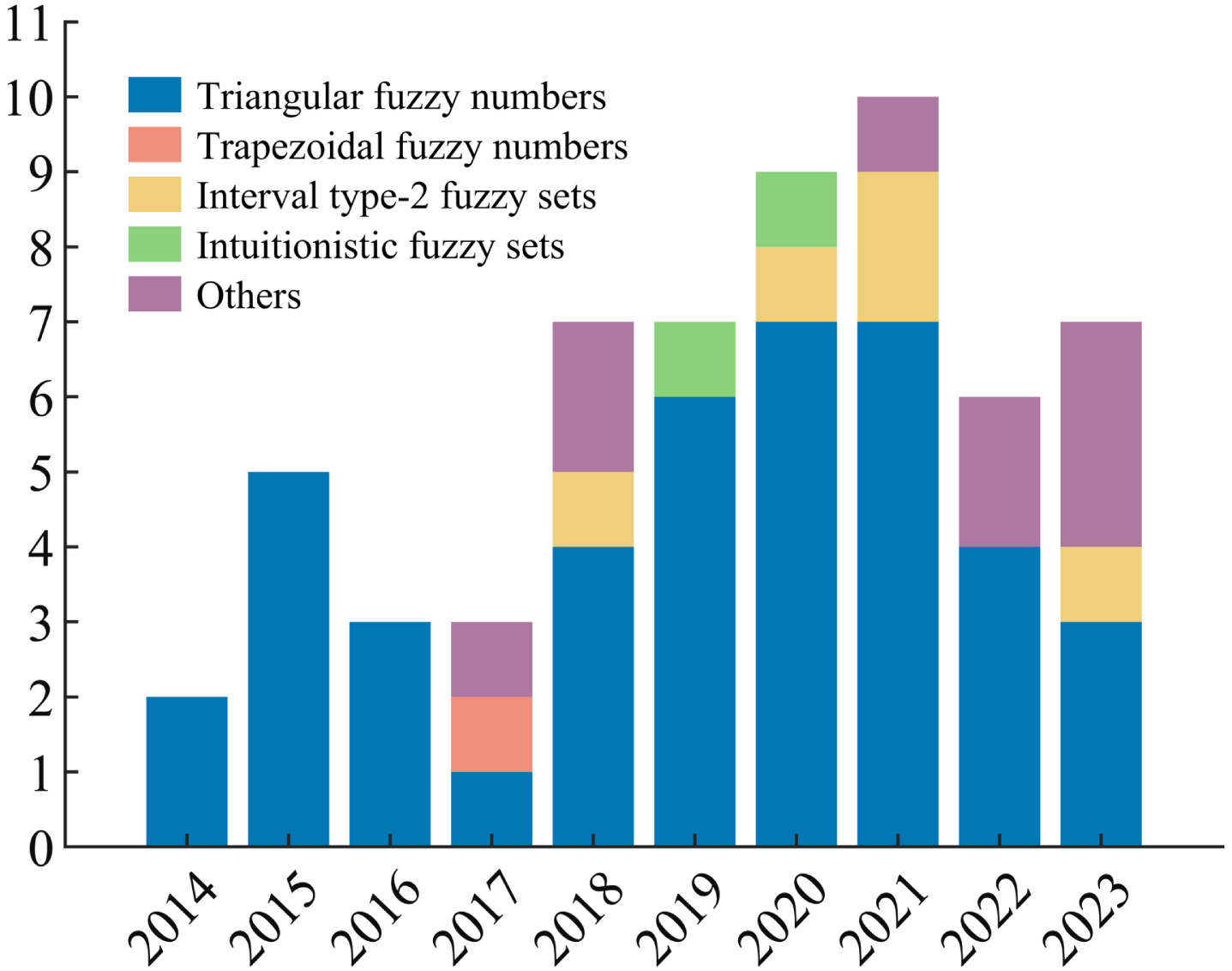
The annual numbers of studies based on fuzzy ANP and TOPSIS from 2014 to 2023.
A summary of some studies based on fuzzy ANP and TOPSIS
From the studies reviewed above, the contribution of this paper can be clearly stated as follows: An approach for determining the formation shape of multi-UAVs considering multiple factors is proposed, and relevant criteria and evaluations are modeled. Based on SFSs and newly designed non-linear transformation functions, the requirement satisfactions for various types of characteristics are obtained and make different evaluations comparable. SFSs are introduced to ANP to handle subjective comparisons involving decision hesitancy and to weight interdependent criteria in TOPSIS.
In this section, we introduce definitions of SFSs and some related operations.
For each u,
Multiplication;
Scoring criteria for qualitative judgment
Multiplication by a scalar; λ > 0
λ. Power of
i.
ii.
iii.
iv.
v.
vi.
In this section, the proposed approach for multi-UAVs formation shape determination is presented. Figure 2 provides an overview of the methodology. First, capability criteria and corresponding evaluations are constructed based on mission requirements. Then, performance data are transformed into requirement satisfaction of capability. Meanwhile, spherical fuzzy ANP is applied to obtain weights of different sub-capabilities. Finally different formation shapes are ranked by TOPSIS.
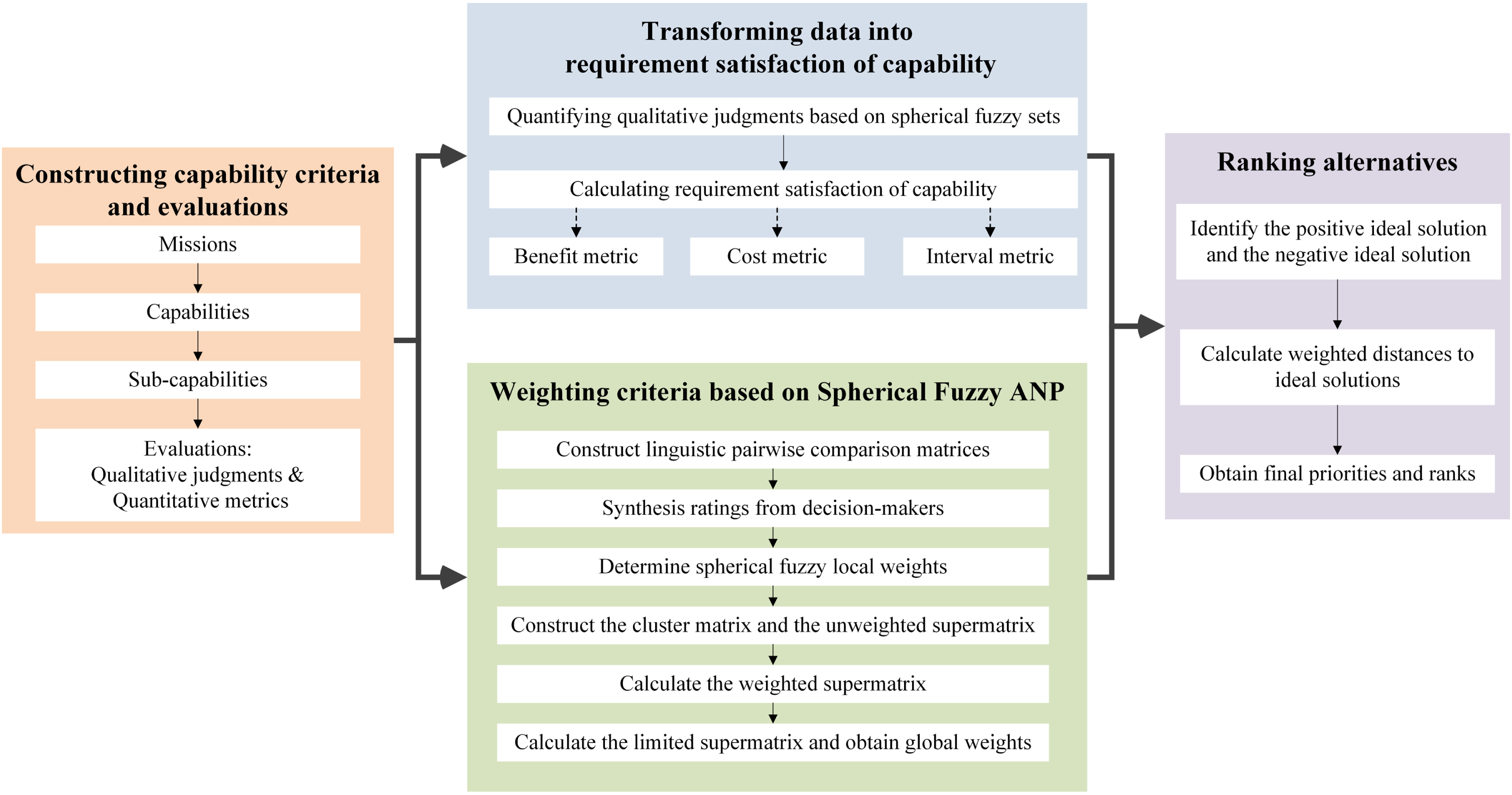
Overview of the proposed approach.
The mission performance of multi-UAVs is usually judged by the satisfaction of capability requirements [45, 46]. The degree of this satisfaction can be evaluated based on existing schemes. In order to determine the optimal formation shape, the capability criteria and corresponding evaluations should first be constructed. Based on literature and common missions, we model 5 main capabilities of multi-UAVs: reconnaissance capability (C1), maneuverability (C2), strike capability (C3), defense capability (C4), and communication capability (C5). Due to the complexity of multi-UAVs missions, these required capabilities are further divided into 13 sub-capabilities as shown in Fig. 3. For each sub-capability criterion, characteristics of different formation shapes are evaluated through qualitative judgment or quantitative metric, which are later translated into requirement satisfaction of capability.
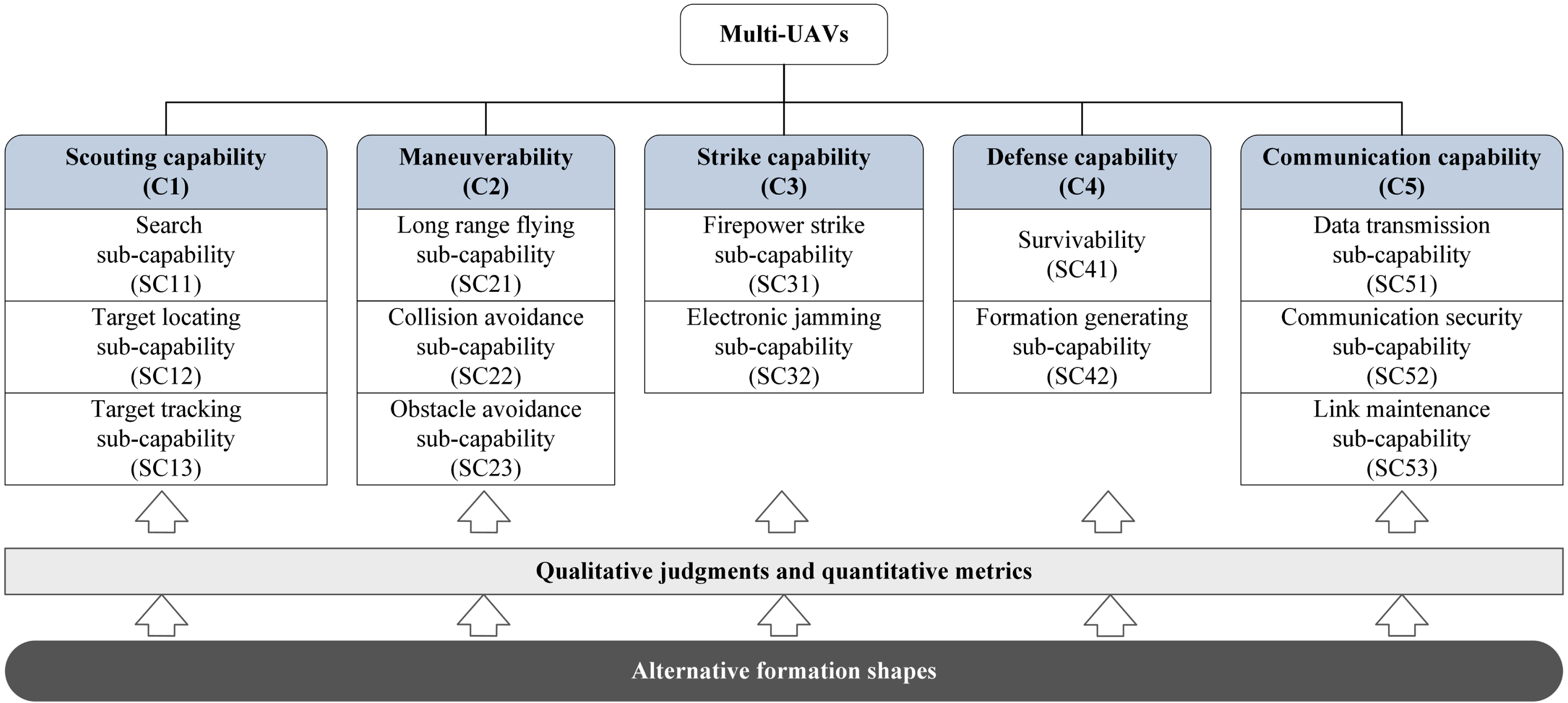
Capability and sub-capability criteria for multi-UAVs.
Detailed capability criteria and corresponding evaluations are modeled below.
Reconnaissance capability refers to the ability of multi-UAVs to perform area reconnaissance, battlefield surveillance, and other scouting tasks. After detecting targets, multi-UAVs need to locate and track them.
Flying in formation can have an impact on UAV aerodynamics, as well as its safety and the ability to pass through certain environments. Maneuverability reflects the ability of multi-UAVs to carry long-range flight and avoid unexpected collisions or obstacles.
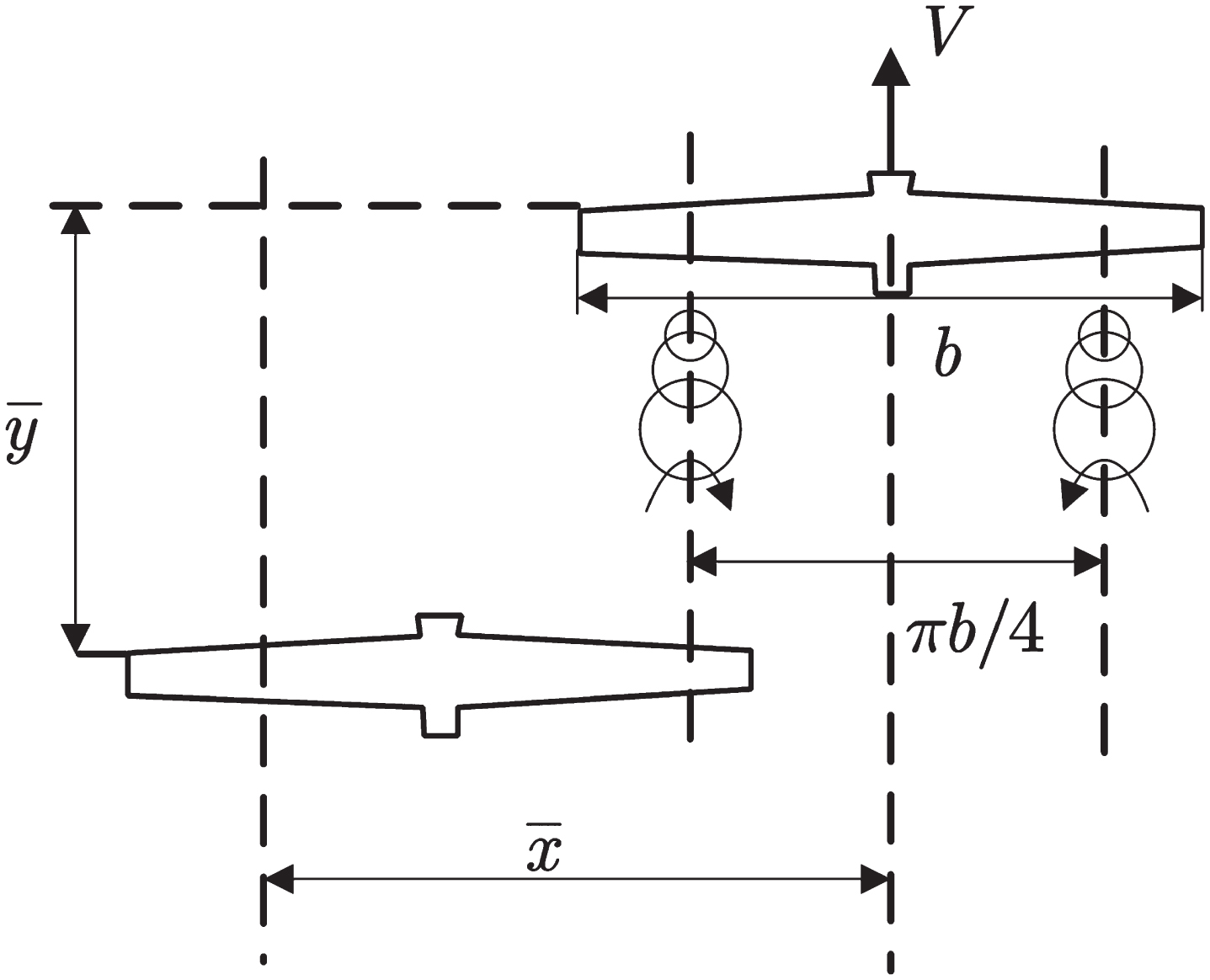
View of two close UAVs from above.
This affects the energy consumption of the following UAV and thus changes the available mission time. We take the average rate of change of the lift-to-drag ratio to evaluate the long-range flying sub-capability of multi-UAVs. Since all UAVs fly in the same plane, the equation of change in drag and lift with two UAVs from [48] can be expressed as
In missions, multi-UAVs are often used as weapons and electronic warfare platforms to conduct firepower strikes or electronic jamming against ground and maritime targets, aiming to make them inoperable.
Multi-UAVs are often deployed in environments filled with anti-aircraft fire and electronic jamming. As a result, on the one hand, multi-UAVs need to avoid detection by satellites or radars as much as possible and keep the formation intact. On the other hand, multi-UAVs must be able to quickly reform into a specific shape to continue the mission after a loss or leaving the original positions.
Communication capability (C5)
Communication is the basis for multi-UAVs to receive commands, act in coordination, and transmit intelligence. The communication capability is further evaluated by data transmission, communication security, and link maintenance.
As described in Section 3.1, characteristics data of different formation shapes are collected through qualitative judgments and quantitative metrics. In order to apply the TOPSIS method, it is necessary to unify these data of different types to the same comparable scale. Here, we first translate experts’ opinions into crisp values based on SFSs and then transform all data into requirement satisfaction of capability on the interval [0, 1].
Quantifying qualitative judgment
For sub-capabilities that are difficult to measure by precise numerical data, we take a multi-experts qualitative judgment to evaluate based on SFSs. First, the experts make a judgment on whether the formation shape can satisfy the sub-capability requirement based on their knowledge and experience. This judgment is expressed by the positive membership μ
sc
, the negative membership v
sc
, and the hesitancy of this judgment π
sc
. Inspired by [51], the values of μ
sc
, v
sc
, and π
sc
are limited in ranges to unify the scoring criteria, and
Then
After quantifying qualitative judgments, all capability criteria are represented with crisp values. However, the units of these values are not identical. To unify these data, requirement satisfaction of capability is introduced. For each criterion, the basic value and the ideal value are used to describe decision-makers’ requirement for the corresponding characteristic. As mentioned in [37] and [38], the increase of requirement satisfaction is not always proportional to the improvement of performance. At the beginning, the satisfaction increases linearly as the performance improves; when the decision-makers’ expectation is approached, the rise in satisfaction becomes slow.
The literature has used sigmoid-like functions to simplify this nonlinear relationship, but the sigmoid function asymptotically approaches 1, resulting in discontinuity at the basic and the ideal value boundaries. For initial performance data p and corresponding satisfaction s (p), three continuous transformation functions are designed considering benefit metrics, cost metrics, and interval metrics.
(1) Benefit metric
For a sub-capability with a benefit metric, the satisfaction is positively correlated with the data value. If the performance data is greater than the ideal value, it is considered that the sub-capability requirement is fully satisfied; if the performance data is less than the basic value, it is considered that the sub-capability requirement is barely satisfied. The satisfaction can be calculated as
(2) Cost metric
Similarly, the requirement satisfaction of the sub-capability with the cost metric is negatively correlated with the data, which is
(3) Interval metric
For the sub-capability with the interval metric, both the ideal value and the basic value are in the form of an interval. Like the above two metrics, the satisfaction is transformed as follows:
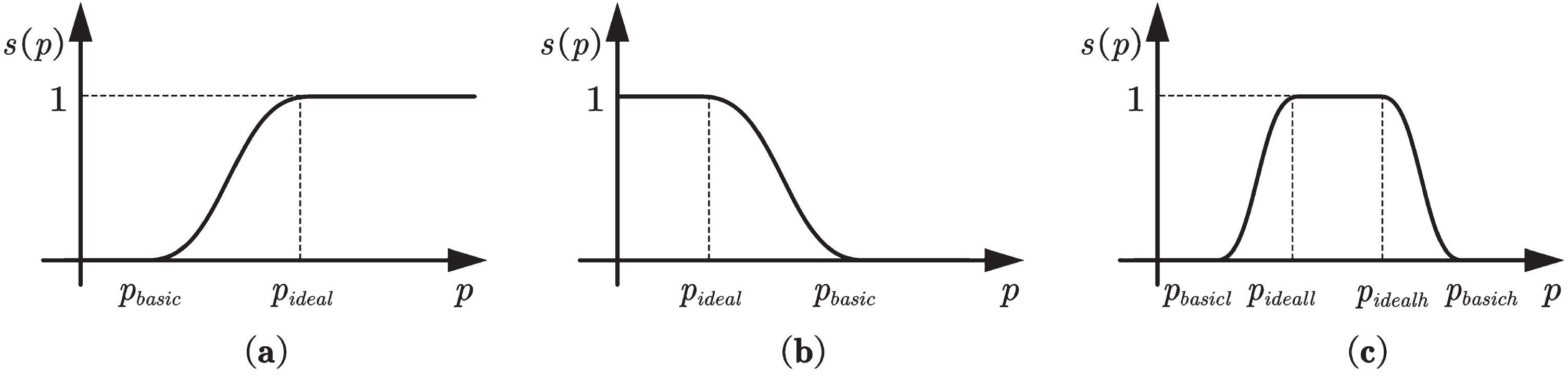
Satisfaction transformation functions of sub-capabilities with (a) benefit metric, (b) cost metric, and (c) interval metric.
Step 1: Construct linguistic pairwise comparison matrices. Each decision-maker constructs linguistic pairwise comparison matrices using the terms listed in Table 3. For each linguistic matrix, the consistency is checked as in traditional ANP by converting linguistic terms to corresponding consistency scales. If the calculated consistency is greater than 0.1, the matrix will be asked to be adjusted.
Linguistic terms and their corresponding spherical fuzzy numbers
Linguistic terms and their corresponding spherical fuzzy numbers
Step 2: Synthesis ratings from decision-makers. In this step, linguistic terms in pairwise comparison matrices are converted into spherical fuzzy numbers based on Table 3. Then with respect to each criterion, pairwise comparisons from different decision-makers are synthesized using SWGM.
Step 3: Determine spherical fuzzy local weights. For a synthesized spherical fuzzy comparison matrix
Step 4: Construct the cluster matrix and the unweighted supermatrix. The spherical fuzzy local weights are defuzzified by Equation and normalized for each spherical fuzzy comparison matrix. Defuzzified local weights in a same capability cluster construct a matrix block w ij and all blocks construct the unweighted supermatrix W = (w ij ) 5×5. The cluster matrix A = (a ij ) 5×5 is constructed in the same way while a ij is a numerical value.
Step 5: Calculate the weighted supermatrix. The weighted supermatrix
and normalized by column.
Step 6: Calculate the limited supermatrix and obtain global weights. The limit weighted supermatrix is calculated by
According to this limit weighted supermatrix, global weights of sub-capabilities under certain mission requirements can be obtained through columns.
After transforming data to the same scale and obtaining the weights of criteria, the final priorities of different formation shapes can be ranked based on TOPSIS. Assume that the number of sub-capability criteria is n
sc
. Note that the satisfaction of the i-th formation for the j-th sub-capability is s
ij
, and the weight of the j-th sub-capability criteria is noted as ω
j
. The positive ideal solution Z+ and the negative ideal solution Z- are identified as
For the i-th alternative, its distances to the positive and negative ideal solutions with weights determined by SFANP can be calculated as
The final priority of the i-th multi-UAVs formation shape under the mission requirement is obtained as
A typical application for multi-UAVs is the search and attack of ground or maritime targets. In this process, multi-UAVs collaboratively find and locate targets and coordinate the strike on the targets. In this section, a search-attack mission is used as a case study to illustrate the proposed approach. Based on constructed capability criteria and evaluations, the performances of six alternative formation shapes are collected and transformed into requirement satisfactions of capability. Three decision-makers are involved to weight the capability criteria using SFANP. The final priorities are given utilizing the TOPSIS method. To validate the proposed approach, some extensions to the TOPSIS method are compared.
Definition of alternatives
Based on the literature mentioned in Section 1, this case study takes triangular, V-shaped, horizontal linear, longitudinal linear, circular, and diamond formations with 9 UAVs as alternative shapes. For convenience of description, these alternatives are numbered from F1 to F6. The shapes of these alternatives are shown in Fig. 6. Formation-related parameters include: d1 = 10b, d2x = πb/4, d2y = 2b, d3 = 10b, d4 = 10b, d5 = 100b, and d6x = d6y = 8b. UAV parameters are displayed in Table 4.
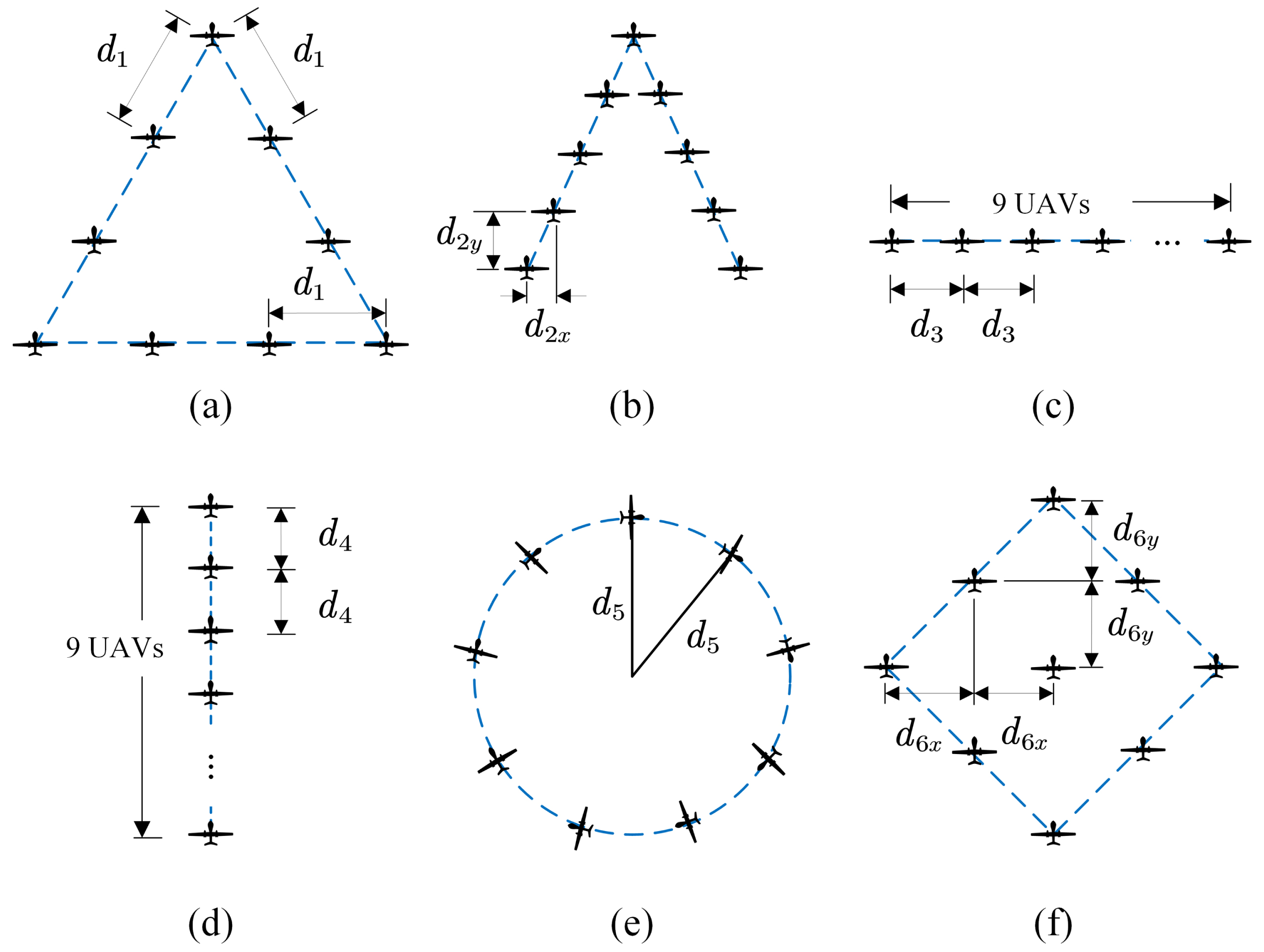
Shape of alternative (a) F1, triangular formation, (b) F2, V-shaped formation, (c) F3, horizontal linear formation, (d) F4, longitudinal linear formation, (e) F5, circular formation, and (f) F6, diamond formation.
Parameters of the UAV
Among the multi-UAVs sub-capabilities presented in Section 3, the target tracking sub-capability (SC13) and survivability (SC41) are evaluated by qualitative judgments. According to the scoring criteria, 5 experts are invited to evaluate SC13 and SC41, and the experts have the same weight. The original evaluation matrices and synthesis results are shown in Table 5 and Table 6.
Evaluation matrix and synthesis result of the target tracking sub-capability (SC13)
Evaluation matrix and synthesis result of the target tracking sub-capability (SC13)
Evaluation matrix and synthesis result of the survivability (SC41)
Other sub-capabilities are evaluated following models built in Section 3.1. The performance data of different formation shapes are shown in Table 7.
The performance data of alternative formation shapes
BM: Benefit metric; CM: Cost metric; IM: Interval metric; QJ: Qualitative judgement.
For each sub-capability criterion, the basic value and ideal value of the corresponding evaluation are displayed in Table 8. The basic value and the ideal value for qualitative judgment are DSF((0.8, 0.2, 0.1)) and DSF((0.4, 0.6, 0.2)), respectively. Following statement in Section 3.2, the performance data are transformed into requirement satisfactions of capability, and the results are shown in Fig. 7.
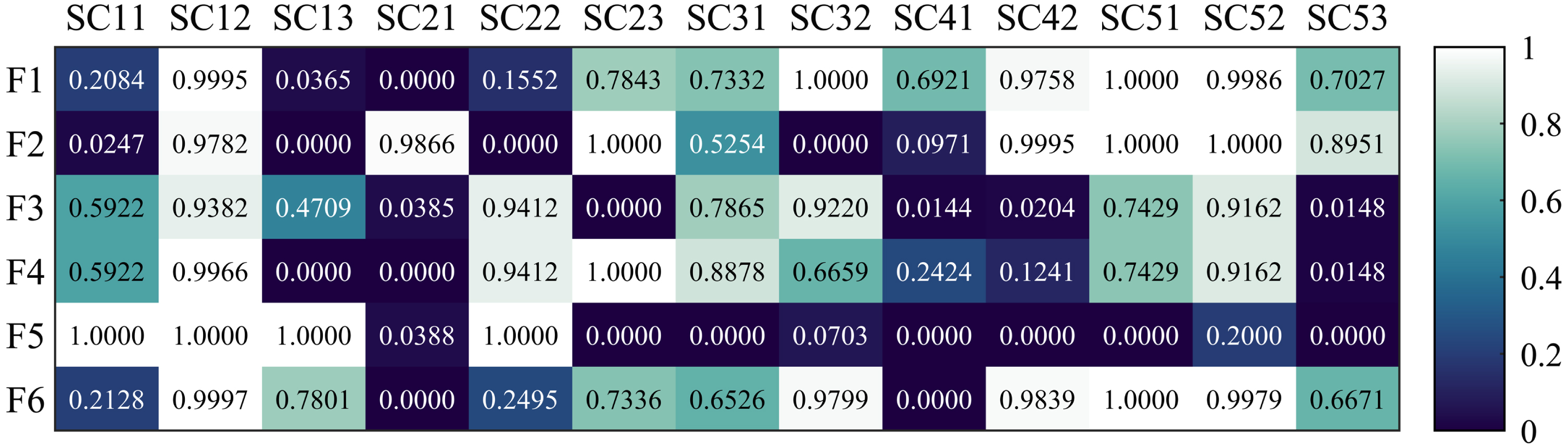
Requirement satisfaction of capability of each formation shape.
Basic value and ideal value of each sub-capability evaluation
Based on decision-makers’ opinions, the interdependencies between the sub-capability criteria for the search-attack mission are displayed in Table 9.
Interdependencies between sub-capability criteria for search-attack mission
Interdependencies between sub-capability criteria for search-attack mission
Based on the linguistic terms defined in Table 3, pairwise comparisons are conducted. After converting linguistic matrices to spherical fuzzy number forms, pairwise comparisons are synthesized. Then spherical fuzzy local weights are determined following Equation (27). Taking the sub-capabilities in C5 as an example, the synthesized results with respect to SC31 are shown in Table 10, and the corresponding local weights are shown in Table 11. Similarly, the local weights for sub-capabilities in each cluster with respect to different criteria can be obtained and used to construct the cluster matrix A and the unweighted supermatrix W, which are shown in Table 12 and Table 13, respectively. Following Equation (28), the matrix blocks in the unweighted supermatrix are multiplied by the elements in the cluster matrix. The result is normalized by columns and the weighted supermatrix can be obtained as shown in Table 14. Then following Equation (29), the weighted supermatrix is multiplied by itself and normalized by columns until each column converge to the same value. This stabilized matrix is the limit weighted supermatrix as shown in Table 15. Among the columns, any non-zero column stands for the global weights of sub-capabilities. The global weights of the sub-capabilities for the search-attack mission are noted in Table 16.
Synthesized pairwise comparisons for sub-capabilities in C5 with respect to SC31
Local weights for sub-capabilities in C5 with respect to SC31
The cluster matrix for search-attack mission
The unweighted supermatrix for search-attack mission
As shown in the results above, the search sub-capability (SC11) is weighted as the most important criterion. This is due to the fact that targets detection is a necessary precondition for striking in the search-attack mission. The sub-capabilities in communication capability (C5) cluster also have higher priorities, which is consistent with the general perception that communication plays an important role in multi-UAVs’ collaboration. The weights of the obstacle avoidance sub-capability (SC23) and formation generating sub-capability (SC42) reflect decision-makers’ focus on formation flexibility. The relatively low priorities of firepower strike sub-capability (SC31) and electronic jamming sub-capability (SC32) indicate that decision-makers prefer to use multi-UAVs as a situational awareness tool, leaving strike requirements to other platforms with greater lethality.
For alternative formation shapes, their final priorities are obtained through Equation (30) to Equation (32). As shown in Table 17, the order is F1 > F6 > F2 > F4 > F3 > F5, and the triangular formation shape is the optimal alternative for the search-attack mission in this case.
The weighted supermatrix for search-attack mission
The weighted supermatrix for search-attack mission
The limit weighted supermatrix for search-attack mission
Global weights of sub-capabilities for search-attack mission
Final ranking of formation shapes for the search-attack mission
To verify the applicability of the proposed approach, three different TOPSIS approaches have been conducted for comparative analysis as follows: TOPSIS with analytic hierarchy process (AHP) to determine criteria weights (AHP-TOPSIS), which is applied in [52]. Only hierarchical relationships are considered and 1–9 scales are used. TOPSIS with ANP determining criteria weights (ANP-TOPSIS), which is applied in [24]. The same 1–9 integer scales are used to construct comparison matrices. TOPSIS with fuzzy ANP determining criteria weights (FANP-TOPSIS), which is applied in [39]. Fuzzy pairwise comparisons are built based on triangular fuzzy numbers.
All the calculations are based on the same satisfaction data shown in Fig. 7. The evaluated priorities are shown in Fig. 8. ANP-TOPSIS and FANP-TOPSIS report the same ranking result as the proposed approach. This proves that the calculation in this paper is consistent and reliable. The small difference in the priority values indicates that the proposed approach is able to reflect the hesitancy in the real decision-making progress after expanding the preference domain. On the other hand, the AHP-TOPSIS approach reports a ranking that F6 > F1 > F3 > F4 > F2 > F5 without considering interdependencies between criteria. The relatively high priority of F6 possibly suggests that the impact of survivability on other sub-capabilities is ignored, which proves that the proposed approach is more practical and credible.
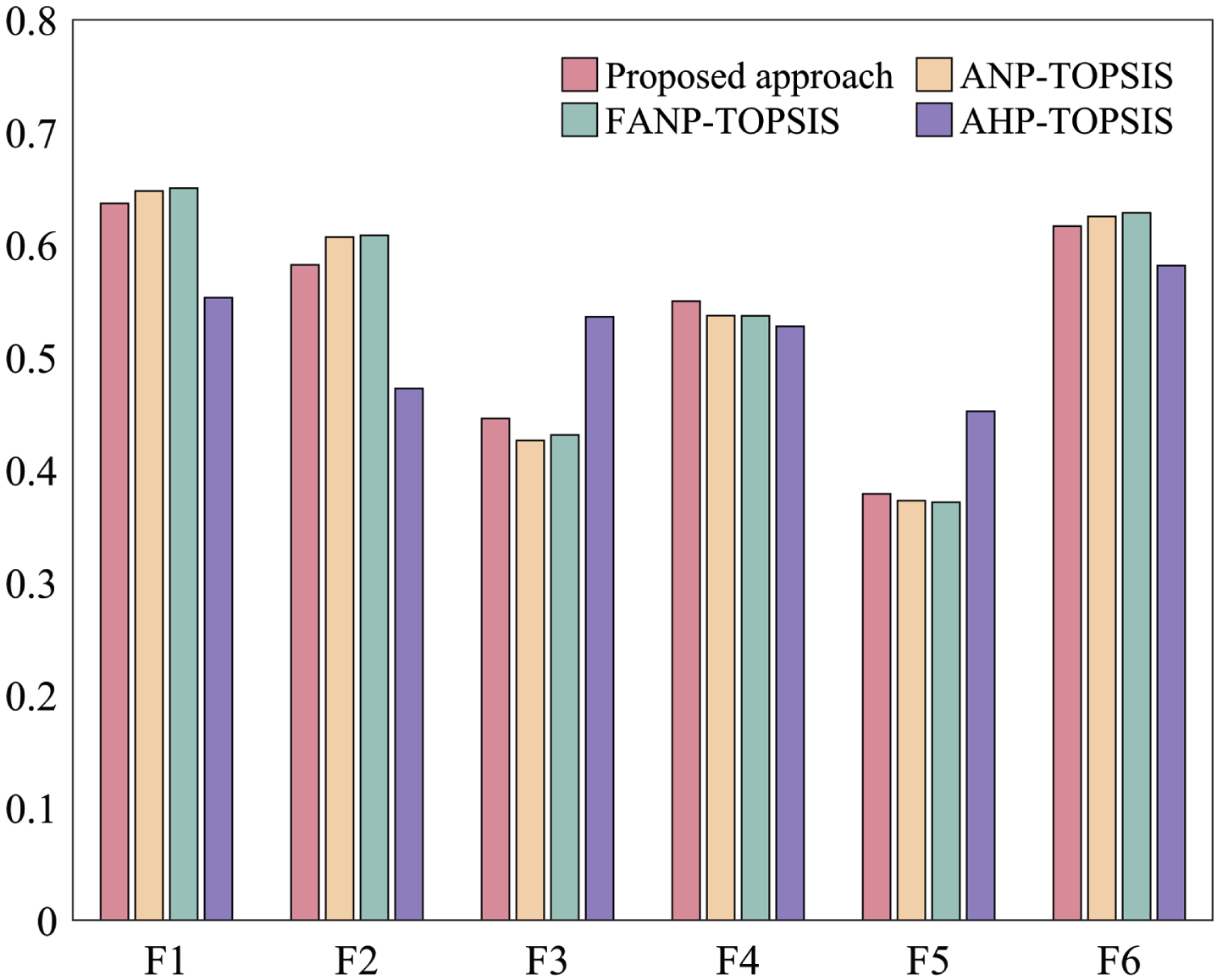
Comparison of priorities of alternative formation shapes calculated by different approaches.
In this paper, a requirement satisfaction and SFANP based TOPSIS approach is presented to determine multi-UAVs formation shape. First, multi-UAVs capability criteria and corresponding evaluations are constructed. Then, performance data of different formation shapes are transformed into requirement satisfaction of capability. Meanwhile, sub-capability criteria are weighted based on SFANP. Alternative formation shapes are ranked by their distances to positive and negative ideal solutions. A case study in which 9 UAVs perform a search-attack mission is set up to validate the presented approach with a comparative analysis.
The approach proposed in this paper provides a practical framework to evaluate different multi-UAVs formation shapes considering the overall mission effectiveness. The approach has the following strengths:
Multi-UAVs capability criteria and their evaluation models are constructed, which reflect the influence of different formation shapes. Traditional data normalization is replaced by requirement satisfaction of capability. Qualitative judgments and quantitative metrics are unified to a same comparable scale. Qualitative judgments are made and quantified based on SFSs which can better express uncertain information. Nonlinear transformation functions are developed for benefit, cost, and interval metrics to address expectations of decision-makers. SFANP is deployed to handle interrelationships among criteria, which takes decision vagueness and hesitancy into account and extends decision-makers’ preference domain.
In terms of future work, it would be more realistic to evaluate different formation shapes with experimental data. Further research can also explore broader capabilities and formation shapes for more complex missions. Additionally, this paper only considers the subjective weights of the criteria, and the credibility of the criteria weights of TOPSIS can be improved by combining objective weights such as information entropy. Other MCDM approaches can be also applied or integrated.
Footnotes
Acknowledgments
This research is supported by the National Natural Science Foundation of China (No. 62073267; No. 61903305), and the Fundamental Research Funds for the Central Universities (No. HXGJXM202214)