
Abstract
In order to improve tourists’ sense of touring experience, this research proposes a signage navigation system for mobile scenic spots. Firstly, the system uses a recurrent neural network algorithm incorporating convolutional neural network for image recognition function to obtain relevant information through image recognition. Then the target localization of the image is performed according to the single-stage target detection algorithm, and the location of the landscape in which the user is located is localized by the recognized image information. The results show that the algorithm can achieve 86.7% recognition accuracy, and it can recognize part of the image samples when the recognition time reaches the range of 0.8 min–1 min. The single-stage target detection algorithm has a localization accuracy of 97.2% with a minimum loss rate of 1.1%. And the algorithm has high average accuracy and full class average accuracy values. The system has good application value.
Introduction
The prosperity of tourism industry represents the level of social and economic development. A tourist attraction is a limited area that provides tourists with a play area, not only to meet the needs of play travel and tourism, but also to provide tourists with knowledge related to the scenic spot [1]. As most of the visitors of popular attractions are foreigners, they are unfamiliar with the background and routes of the attractions, so the signage guidance system of scenic spots is developed as a result. The traditional signage guidance system is composed of signage in a fixed position in the scenic spot. With the gradual increase in tourists’ demand for play, the traditional guidance system has been difficult to cope with the current tourism trend [2]. Therefore, for satisfying the advancement trend of tourism, a new type of scenic area signage guidance system has become the focus of research. The new guidance system should have more comprehensive functional services, mainly for improving the efficiency of guidance information and provide personalized services for tourists. For addressing the above issues, this research presents a new mobile scenic area signage navigation system for smart devices. The system uses the Convolutional Neural Networks Recurrent Neural Networks (CNN-RNN) algorithm to add an image recognition function, allowing visitors to obtain information about the landscape through the system’s recognition function. Single Shot Detector (SSD) algorithm is also invoked, which allows the system to locate the target visitors through the landscape images identified by the visitors in order to provide personalized services [3, 4]. This research is separated into five. The first is an overview of the research direction of the full paper. The second is a review of the current state of research on the algorithms used in the article. The third part first investigates the image recognition performance of CNN-RNN algorithm, then analyzes and discusses the SSD algorithm used for target localization, and then proposes a mobile scenic signage guidance system for intelligent devices by combining the above two algorithms according to the functional classification of scenic signage guidance systems. In the fourth part, the performance of CNN-RNN and SSD algorithms are analyzed and the constructed guidance system is comprehensively evaluated. The results show that the system has good application results. The fifth part summarizes the results and shortcomings of this research.
Related works
Computer vision technology is a method to process and analyze images using computer and image processing techniques. Among them, CNN-RNN and SSD are widely used as common image processing techniques in the field of unused. Li et al. [5] proposed a dance recording model using CNN-RNN to capture features of dance movements in space and time by CNN-RNN algorithm and rank the features by using attention mechanism. The experiment illustrates that the recognition accuracy is 93.29%, which has good application prospects. Liu et al. [6] constructed a data prediction model using deep neural networks for forecasting the service life of super capacitors. The remaining battery capacity was predicted by adding a backward recursive layer to the input sequence. The experiment illustrates that the model has a high prediction accuracy with error values between 0.0241 and 0.0275.
SSD algorithm has good accuracy and recognition application value as a single-stage target detection algorithm. Zhao et al. [7] used SSD algorithm for vehicle detection in intelligent transportation system, and enhanced the localization capability of SSD by cascade detection mechanism, and used the target detection module for enhancing the recognition accuracy of this algorithm. Experiment indicates that the improved SSD algorithm has faster computing efficiency and recognition accuracy compared with the traditional SSD algorithm. Xu et al. [8] constructed a reliability evaluation model for unmanned swarm information exchange networks using the SSD algorithm. The algorithm measures the reliability index of this network by proposing a reliability threshold. The experiment indicates that the algorithm can effectively evaluate the reliability of the unmanned swarm information exchange network. Parvathi and Selvi [9] presented an SSD model for determining the maturity of coconuts. The model first inputs the image of mature coconut as the judgment criterion, and then compares it with the image of target coconut for detection. The determination of coconut maturity is carried out by detecting the similarity of the two images. The experiment indicates that the model has some application value in the field of coconut maturity judgment. Wang et al. [10] presented an improved SSD algorithm model for sewing gesture image detection. The model uses the Resnet50 residual network as the base network and incorporates a feature pyramid network for low-level feature detection. The experiment indicates that the average detection accuracy of the model is 88.69%, which indicates that the target detection performance of the model is enhanced to some extent. Li et al. [11] set up a multi-target SSD detection mechanism for addressing the limitations of small target detection. Firstly, the original image is segmented, then the segmented image is fed into the multi-module detection mechanism, and finally the detection results of different modules are combined and the final values are output. The experiment indicates that the recognition accuracy of this multi-target SSD detection algorithm is 96.6%, which is 9.2% higher than the accuracy of the traditional SSD algorithm.
Computer vision technology, as a technology that relies on intelligent devices to simulate the human visual system, has been used in a number of important applications in various fields. Sykes [12] designed a Faster R-CNN iPad application for the application of computer vision, which can be used to create classifiers for image data acquisition and recognition. The study selected the complex environment of a grocery store as an experimental setting to validate the performance of the program. The experimental results showed that the program achieved 99% accuracy, 85% usability and the system response time was only 3.8 s. Ahmed et al. [13] constructed a sun tracking system using computer vision techniques and light sensors. The controller of the system is ATmega128, through which objects such as the sun and clouds can be distinguished to avoid the interference of clouds. Also, integrating the system with fiber optic cables also allows the captured daylight to be used for indoor lighting.
In summary, CNN-RNN algorithm and SSD algorithm are widely used in different fields due to their excellent computational performance.Both CNN-RNN algorithm and SSD algorithm have demonstrated excellent feature recognition ability in different fields and make recognition prediction based on image features. Among them, SSD algorithm also has the ability of target localization. At present, the traditional scenic area signage guidance system in the tourism industry is difficult to cope with the complex needs of tourists, and the new scenic area signage navigation system has gradually become a research hotspot. Therefore, this study proposes to combine the CNN-RNN algorithm with the SSD algorithm to construct a mobile scenic area signage guidance system. The system utilizes CNN-RNN algorithm to complete the recognition of scenic area signage image targets in order to facilitate users to understand the scenic area information, and then utilizes SSD algorithm to locate the location of scenic area signage in order to satisfy the different tour guidance needs of tourists.
Research on the signage guidance system of tourist attractions based on computer vision technology
The signage guidance system is an information service system set up in scenic spots to convey different tour information to visitors. The system combines the spatial information of the scenic area and the needs of visitors to provide them with corresponding guidance services. For enhancing the satisfaction of scenic area services, the optimization of traditional signage guidance system is imminent. Computer vision technology is a technology that uses computers to simulate the human visual system, aiming to generate results similar to the human visual experience. This study proposes to apply computer vision technology to mobile scenic area signage guidance system to provide information delivery service for visitors through image recognition and target detection and positioning of user’s tour attractions to improve the diversity of the system and meet different visitor guidance needs.
Research on CNN-RNN based scenic area signage guide image recognition
Scenic area signage and guidance system is mainly to recognize images through the system, so as to provide users with corresponding scenic area information, therefore, the function of scenic area signage and guidance system is based on image processing and recognition. Therefore, the function of the system is based on image processing and recognition, and CNN-RNN is a commonly used image segmentation algorithm, which realizes image segmentation by controlling which region each pixel belongs to. Therefore, CNN-RNN is suitable for the design of the scenic area signage guidance system in this study.
Schematic of the operation of CNN-RNN.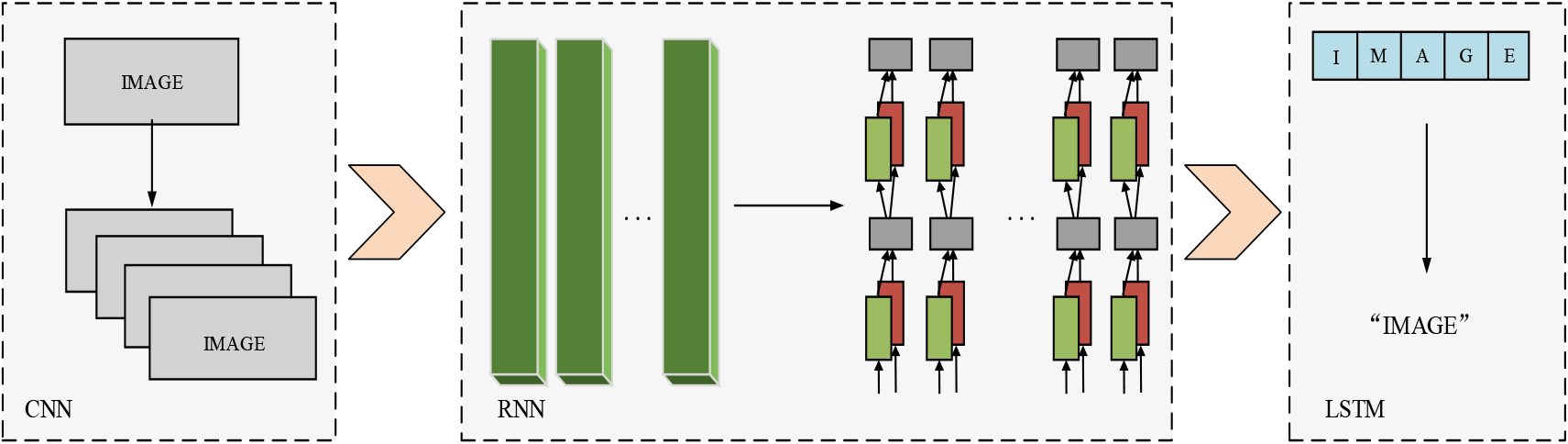
Figure 1 shows the schematic diagram of the operation of CRNN. It can be seen that the CNN-RNN is composed of three modules: Convolutional Neural Networks (CNN) for natural scene image feature extraction, Recurrent Neural Networks (RNN) for building feature vector sequences, and Long Short-Term Memory (LSTM) for feature data classification. (CNN) for natural scene feature extraction, Recurrent Neural Networks (RNN) for building feature vector sequences, and Long Short-Term Memory (LSTM) for feature data classification [14].
Convolution flow chart.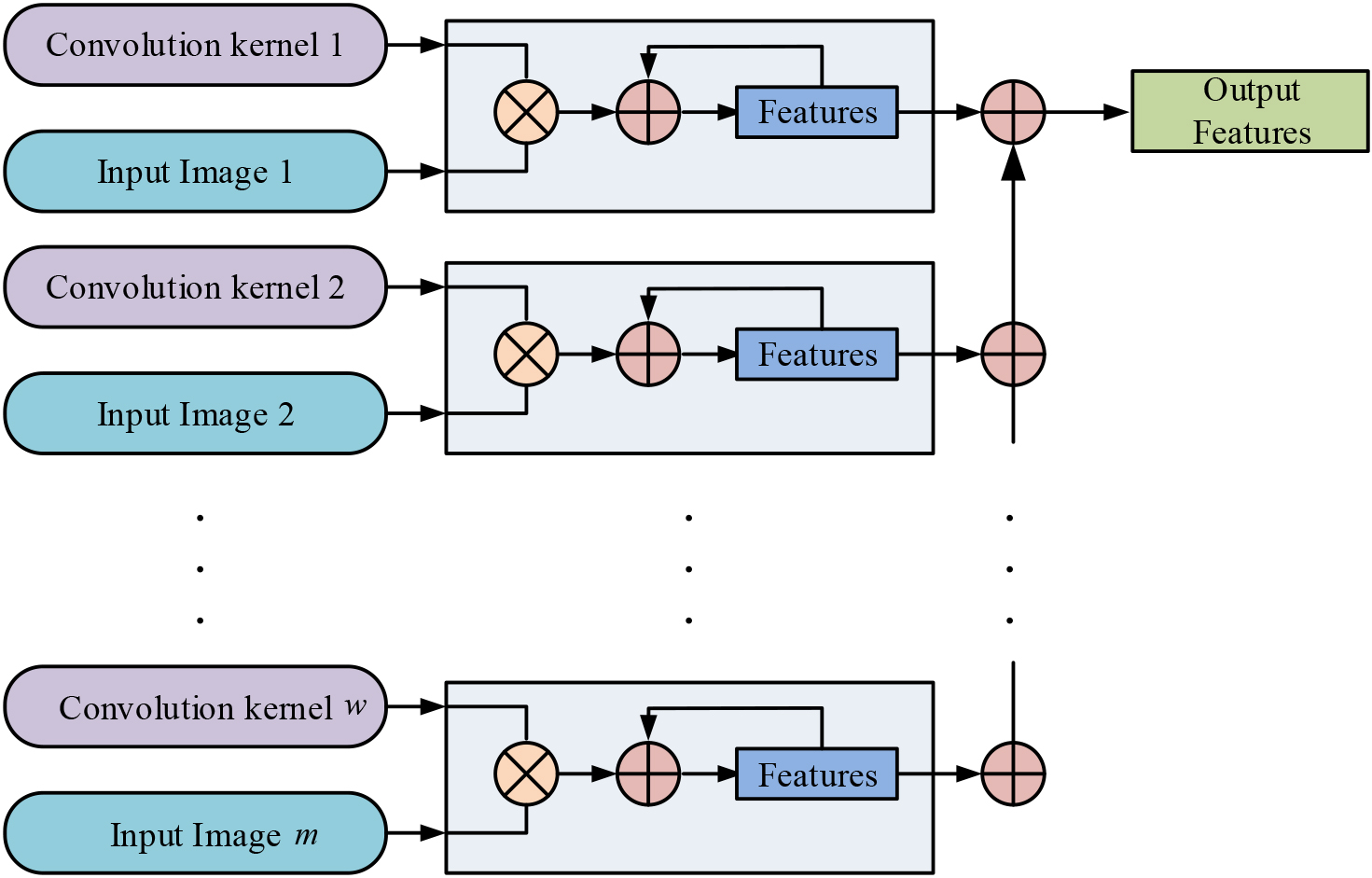
Figure 2 shows the flow chart of convolution operation, and it is illustrated from Fig. 1 that the convolution layer is a convolution operation of the target image by multiple convolution kernels to form the corresponding multi-layer eigenface to achieve multiple feature extraction of the target image. The operation of the convolution layer is generally performed by integration, and its expression is shown in Eq. (1).
In Eq. (1),
By setting the size of the input image
In Eq. (3),
RNN loop system.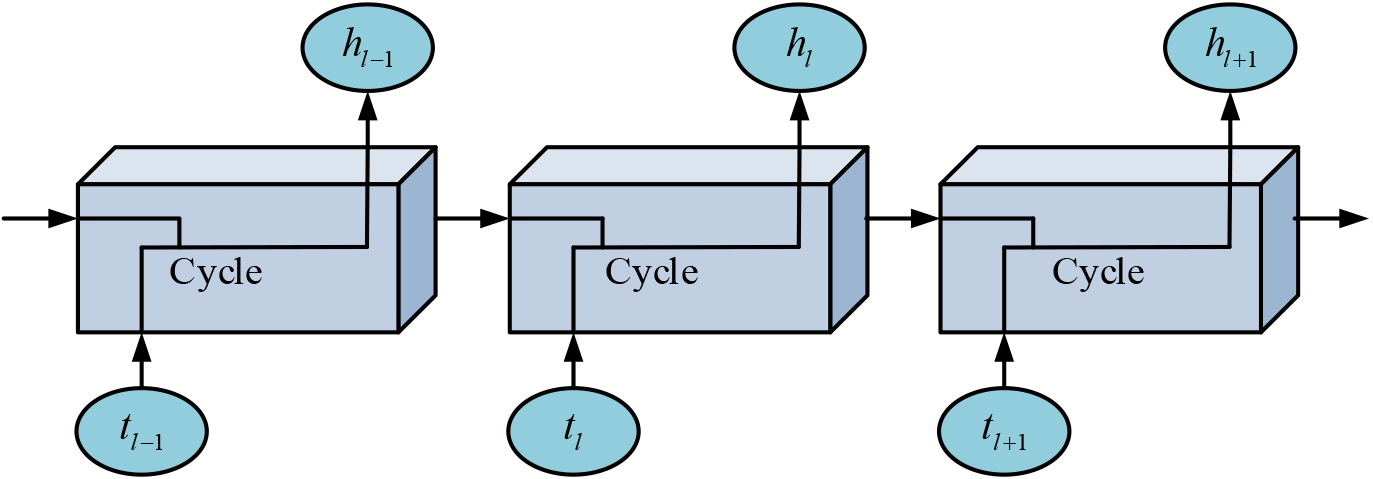
Figure 3 shows the RNN recurrent system. It can be seen that the RNN cycle is essentially a chain structure, and the operations are performed by successive neural networks combined with operations. the RNN cycle expression can be represented by Eq. (4).
In Eq. (4),
The Tanh activation function has good symmetric operation ability and fast operation efficiency. From Eq. (4), we can get that the input states at different moments in the RNN cyclic system are different, so when constructing the feature sequence, it is necessary to calculate the sequence weights according to the corresponding weights at different moments. The expression is shown in Eq. (6).
In Eq. (6),
The LSTM network can remember the long-term dependencies through the long and short-term memory mechanism, thus avoiding the feature vector forgetting process. The network performs forgetting selection based on the results of the output values, and if the current moment’s output value does not match the historical output value, then the LSTM network opens the forgetting gate, removes the historical output value, and saves the calculated current moment’s output value, thus solving the case of computational errors in the CNN-RNN algorithm.
In order to realize the positioning function of the scenic area signage oriented target system and accurately locate the position of the tourists, this study adopts the SSD algorithm, which is based on the operation of CNN algorithm, and the target features obtained are more and more advanced with the superposition of the network layers.The SSD algorithm can target the image features identified by CNN-RNN algorithm, so that it can judge the user’s position and provide intelligent services for them .
SSD network system.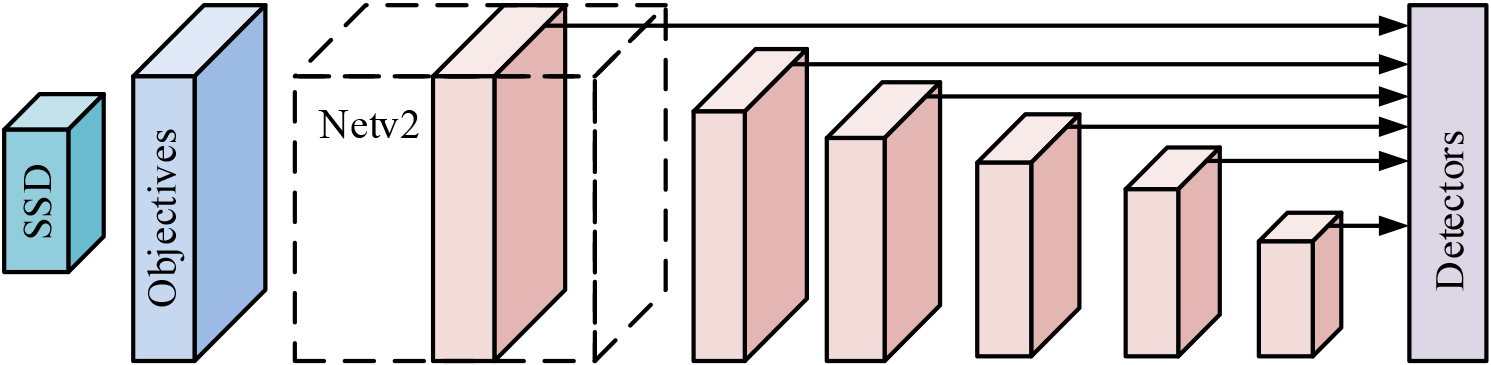
Figure 4 shows the SSD network system. In order to make the algorithm applicable to mobile smart devices, compared to the traditional SSD algorithm with VGG16 as the core network, this research uses the NetV2 network as the core network of SSD for operation [16]. As can be seen from the Figure, when performing target detection, the initial detection is first performed in the detection frame, and the expression formula for the size of the detection frame is shown in Eq. (7).
In Eq. (7),
In Eq. (8),
In Eq. (9),
The essence of the position error in Eq. (10) is the Smooth loss function. The actual positioning of the target detector can then be accurately located when the error operation of the positioning position and confidence function is performed.
The signage guidance system of the scenic spot refers to the equipment that provides route navigation for tourists in a specific spatial scope of the scenic spot. The application of signage guidance system can not only provide convenient guidance services for tourists, but also highlight the characteristics of attractions and play a role in promoting the cultural characteristics of scenic spots. The application of the system is divided into different categories according to the difference of service purposes, and can provide tourists with quality guidance services by playing different functions.
Signage guidance system categories.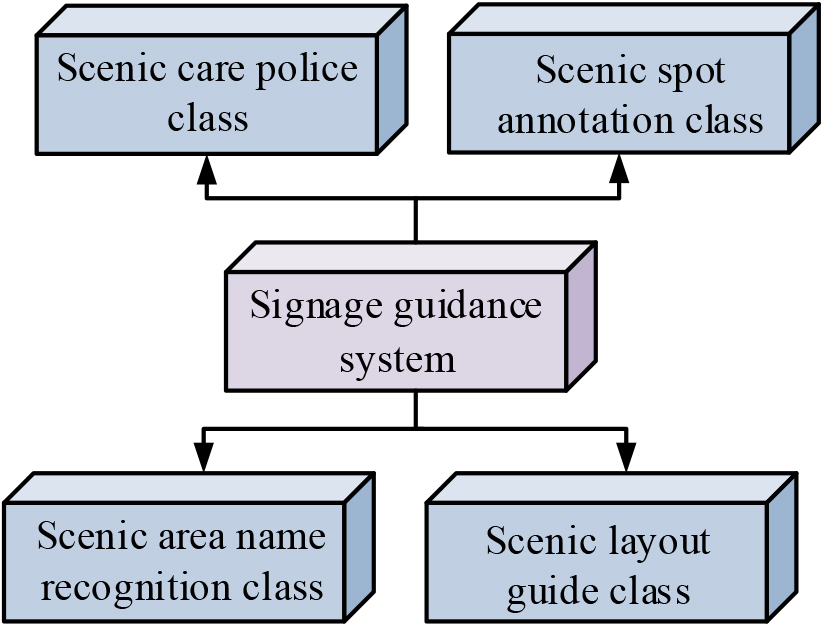
Figure 5 shows the signage guidance system categories. From Fig. 5, we can see that the signage guidance system is divided into four major categories. First is the care warning signs of scenic spots, the purpose of such signs is to remind visitors to pay attention to play safety and comply with the regulations of scenic spots. Especially in some scenic spots with more complicated terrain and environment, the role of safety warning category signs is very important. In addition, environmental warning signs have the role of scenic ecological protection, in the natural landscape is rich in scenic spots, set up warning signs is very necessary. The second is the scenic spots annotated signs. Attractions annotated signs help visitors quickly understand the cultural background and historical evolution of the place of play. The current common annotated content includes information about the designer of the building, the historical evolution of the natural landscape, regional wind speed characteristics, etc. Then comes the name recognition of the scenic spot. Name recognition is the most common type of scenic area identification, mainly to allow visitors to determine the location of their own attractions, and can also be divided into natural landscape and cultural characteristics of the landscape in accordance with the characteristics of the scenic area, to improve visitors’ perception of play. The last one is the scenic area guide signs. The guide sign refers to the direction with the location of the guide signs, mainly set in the tour route with a fork in the roadside. Visitors can quickly determine their location and the route to the next destination through the guide signs [18].
The design of scenic spot signage guidance system is crucial. In the design, it is essential to combine the cultural characteristics and actual operation of the attraction to understand the tourists’ play needs. Only the scientific and systematic integration of tourists’ needs and design principles can create a signage guidance system with good use effect.The CNN-RNN algorithm proposed in this research is used in the image recognition function in the system, and the user can identify the environmental information of the attractions they are in by the image recognition function of the CNN-RNN algorithm.The SSD algorithm is used in the user localization function in the system, and the SSD algorithm can locate the user based on the image features of the attractions identified by the CNN-RNN. Combination of CNN-RNN algorithm and SSD algorithm can design the intelligent scenic spot signage guidance system.
Figure 6 illustrates the mobile scenic area signage guidance system designed by using computer vision technology. From Fig. 6, we can see that this design is detached from the traditional fixed signage form and uses intelligent mobile devices as a carrier to add guidance functions such as visual guidance, information inquiry and personalized experience. First of all, the basic information of the scenic spot is input into the mobile guidance system, and the scope of guidance is set. The realistic content of the display is designed according to the service functions to be provided, mainly including text content, text size and color. In order to improve the visitors’ sense of using the scenic spot signage guidance system, this design combines CNN-RNN algorithm and SSD algorithm to develop the function of image recognition and target location for the mobile system. Visitors can use the system’s image recognition function to identify attractions and then perhaps corresponding attraction information, and the target location function locates the user’s location by the identified attraction location and provides intelligent recommendations for the visitor’s travel route .
This research proposes to use CNN-RNN algorithm and SSD algorithm to construct a scenic signage guidance system. Among them, the CNN-RNN algorithm is used to realize the image recognition function in the system to provide information for the users, and the SSD algorithm realizes the user’s target localization function in the system in order to provide route recommendation service for the users. In order to verify the performance of the above two algorithms in the system, this study sets up different experiments to analyze and verify them.
Application performance analysis of CNN-RNN algorithm
To verify the performance of the computer vision techniques used in this design, the Residual Network-Connectist temporal classification (ResNet-CTC) and Densely Connected Network temporal classification (Densely Connected Convolutional Networks-Connectionist temporal classification, DenseNet-CTC) as CNN-RNN algorithms, ResNet-CTC and DenseNet-CTC are both commonly used image recognition algorithms with good capturing image detail function. In this experiment, 60,000 images collected from a scenic spot are used as the experimental data set, separated into 6 groups on average, and separated into training and validation sets according to the ratio of 8:2. The 60,000 images are recognized by using the guidance system under different algorithms, and the performance of the algorithm is judged according to the recognition structure.
Experimental environment
Experimental environment
Design of mobile scenic area signage guidance system based on computer vision technology.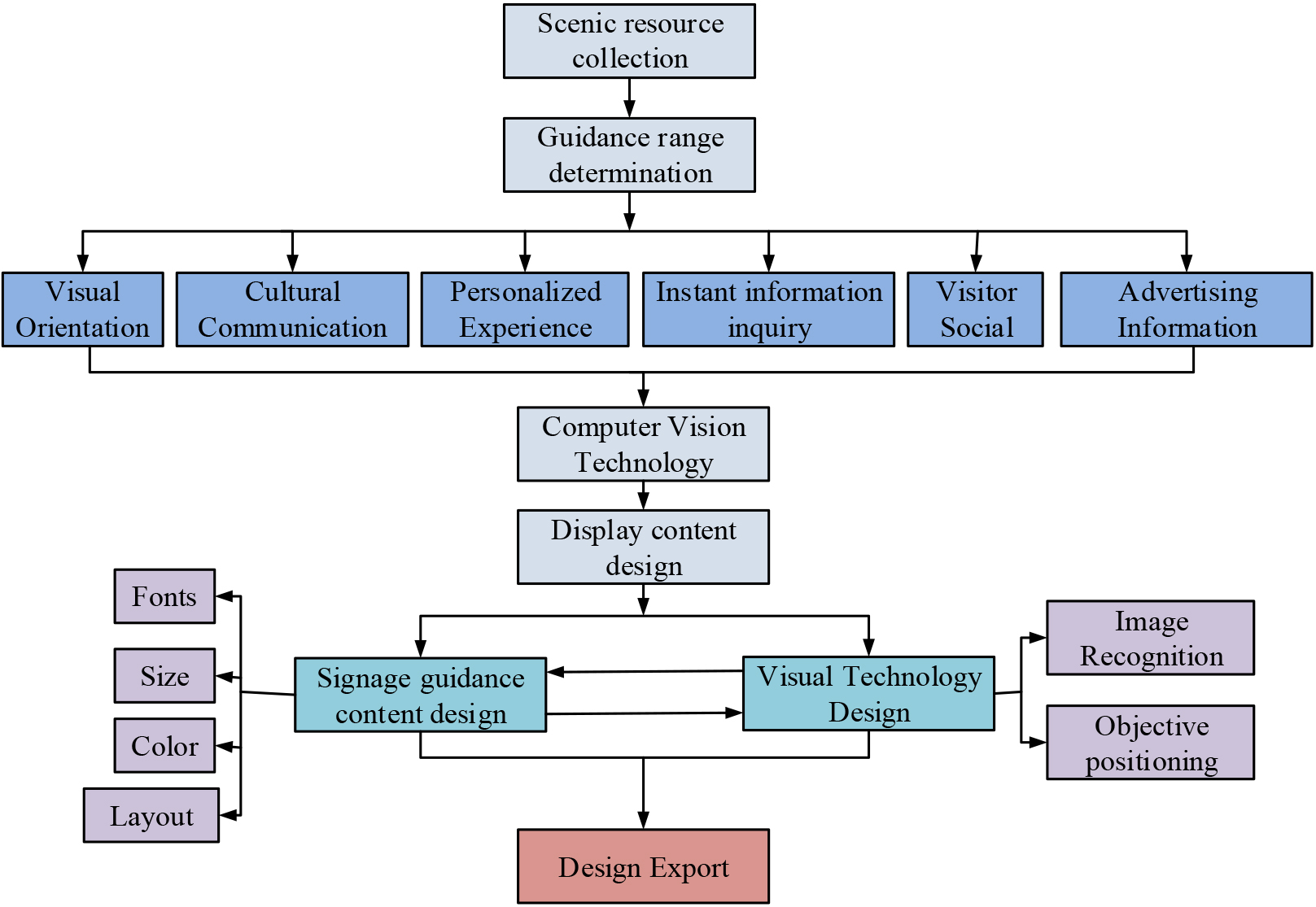
Table 1 shows the experimental environment table. The operating system used for the study is Windows 2012 Professional, the processor version is Intel i-6-6400, and the type of database is Microsoft SQL Server2012 Windows 2012 Server. this study uses the above software system to analyze the performance of the research CNN-RNN algorithm and SSD algorithm, and to construct a marking system to analyze the application effect. The performance of the algorithm is analyzed, and the marking system is constructed in this way to analyze the application effect. Since this design uses the SSD algorithm under the NetV2 base network, the comparison algorithm will use the traditional SSD algorithm under the VGG16 base network.
Recognition accuracy under different image recognition algorithms.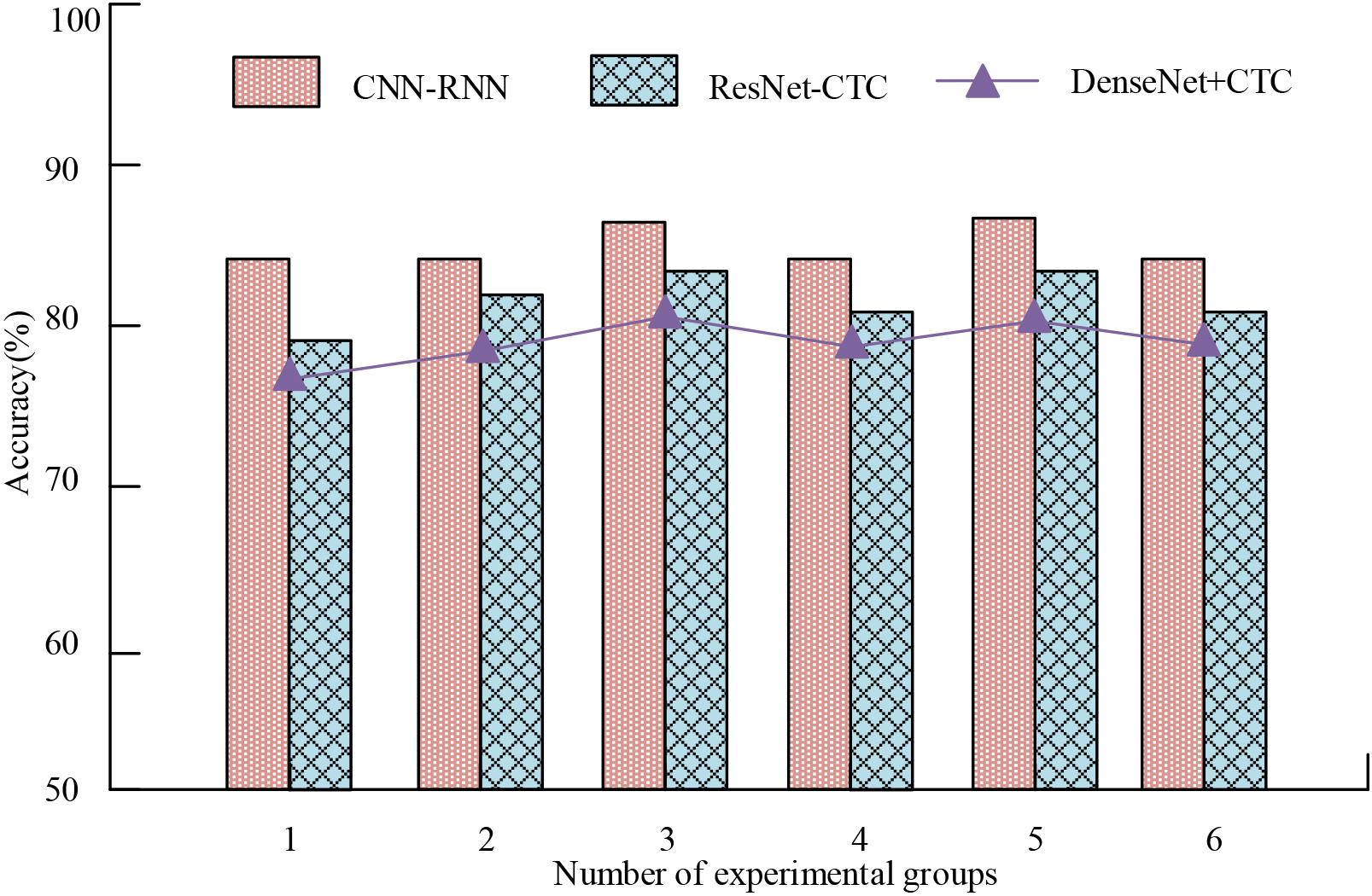
Figure 7 indicates the recognition accuracy under different image recognition algorithms. Figure 7 demonstrates that the recognition accuracy of CNN-RNN algorithm is the highest in all six groups of parallel experiments, followed by ResNet-CTC algorithm, and the lowest recognition accuracy is DenseNet-CTC algorithm. Among them, the highest recognition accuracy of the CNN-RNN algorithm can reach 86.7%. This is because the CNN-RNN algorithm proposed in the paper combines three algorithms, CNN, RNN and LSTM, among which CNN has good data processing effect, while RNN can make up for the weaker data association processing ability in CNN algorithm, and LSTM algorithm optimizes the ability of CNN and RNN algorithm to process long sequence feature vectors, avoiding the problem of RNN in processing long sequence The LSTM algorithm also optimizes the ability of CNN and RNN algorithms to process long sequence feature vectors, avoiding the possible gradient disappearance when RNN performs cyclic operations on long sequence feature vectors. Therefore, the CNN-RNN algorithm has good image recognition accuracy.
Figure 8 shows the comparison of recognition time under different image recognition algorithms. From Fig. 8, it can be seen that when performing image recognition, the CNN-RNN algorithm mainly focuses on recognizing most of the images around 0.8 min–1.0 min, while the main recognition time range of ResNet-CTC algorithm is between 1.4 min–1.6 min, and DenseNet-CTC algorithm’s recognition time is mainly between 1.6 min–1.8 min. The recognition time of DenseNet-CTC algorithm is mainly between 1.6 min–1.8 min. This is because the RNN algorithm in the CNN-RNN algorithm has the ability of cyclic operation when dealing with a large number of samples, and the LSTM network can also reduce the probability of forgetting feature vectors through the mechanism of long and short-term memory to improve the effective recognition range of the image, thus improving the efficiency of image recognition. In summary, the CNN-RNN algorithm has high image recognition efficiency.
Comparison of recognition time under different image recognition algorithms.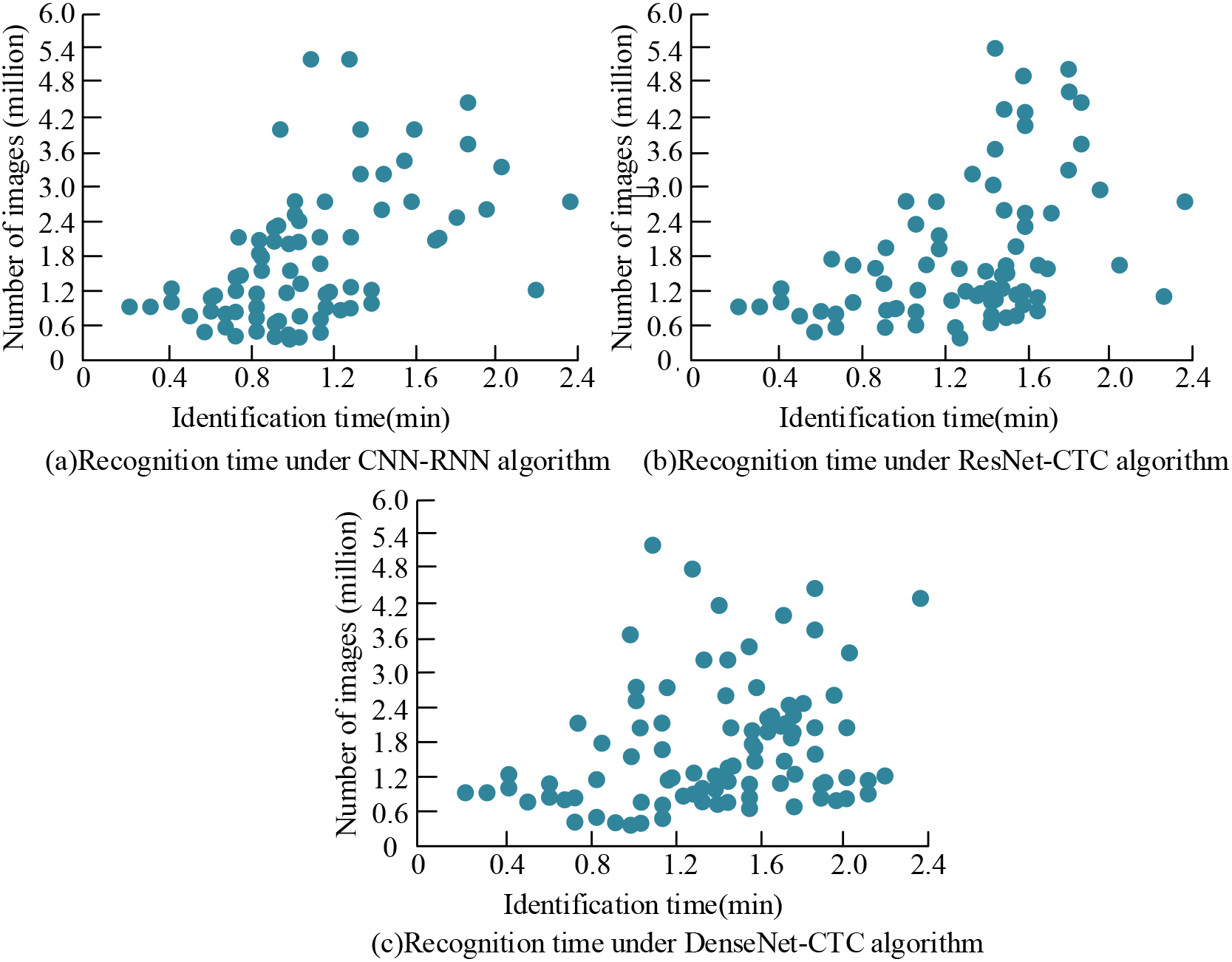
Target localization accuracy loss rate curve for different SSD algorithms.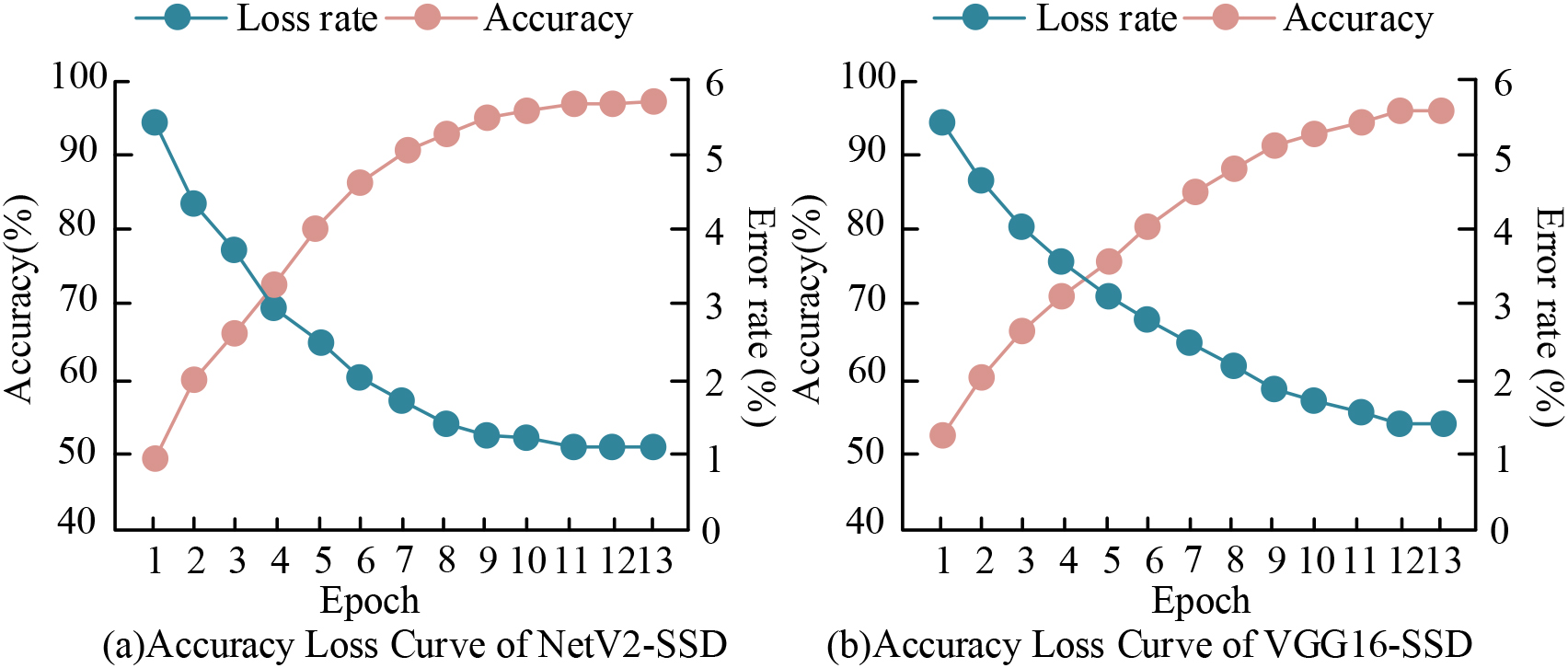
Figure 9 shows the target localization accuracy loss rate curves of different SSD algorithms. From Fig. 9, we can see that the localization accuracy of the SSD algorithm using NetV2 and VGG16 as the base network can both improve with the growth of the quantity of experiments, and the loss rate can both decrease with the growth of the quantity of experiments, and the accuracy and loss rate of the final algorithm can both converge to the steady state, indicating that the algorithm can achieve stable performance during the experimental training. Among them, the accuracy of the NetV2-SSD algorithm is 97.2% when converging to the steady state, which is superior to the accuracy of 95.6% of the VGG16-SSD algorithm. the stability loss rate of the NetV2-SSD algorithm is 1.1%, which is lower than the 1.3% of the VGG16-SSD algorithm. Taken together, the NetV2-SSD algorithm has better localization performance in mobile scenic signage guidance system.
Figure 10 shows the AP values of different SSD algorithms. From Fig. 10, it can be seen that when experiments are conducted on the same sample set, the area values of accuracy and recall of NetV2-SSD are higher than that of VGG16-SSD, so NetV2-SSD has superior localization accuracy. When the recall of the algorithm is 1.0, the precision of VGG16-SSD has been reduced to 70.4%, while NetV2-SSD is 88.7% precision. The size of the AP area value reflects the overall function of the algorithm. This is because NetV2 has good computing efficiency as a lightweight network model compared to VGG16 network, which is more suitable for the operation of smart mobile devices. Therefore, the NetV2-SSD algorithm has certain applicability in mobile scenic signage guidance system.
mAP values under different SSD algorithms
AP values for different SSD algorithms.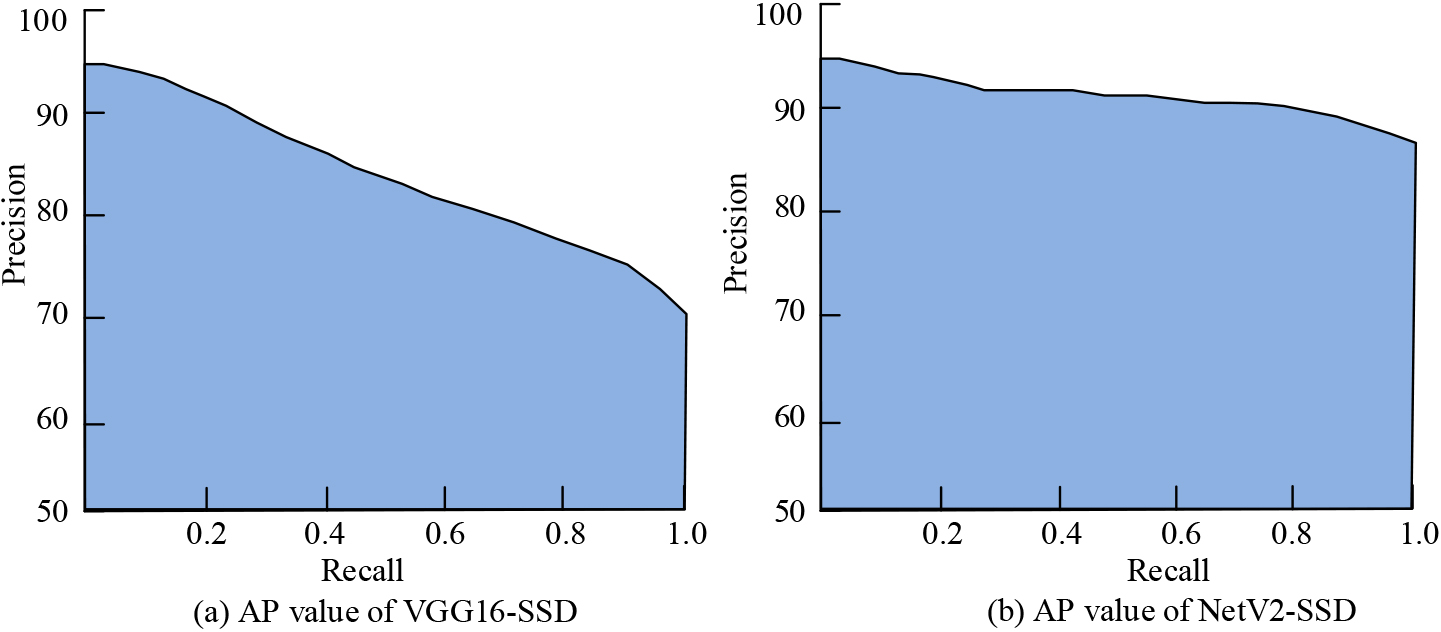
As can be seen from Table 2, the experiment classified the types of images positioned into six categories, namely natural landscape, cultural buildings, rest areas, scenic restaurants, service areas, and ticket points. The NetV2-SSD algorithm’s mAP values for detecting and localizing the above six types of images are better than those of the VGG16-SSD algorithm, reaching mAP values of 89.60%, 88.50%, 91.20%, 92.60%, 95.60%, and 97.10%, respectively. the higher the mAP values indicate that the algorithm’s localization accuracy is higher. Therefore, the NetV2-SSD algorithm can better meet the requirement of real-time localization of tourists so that the mobile tour guide system can recommend tour routes to the next attraction for tourists.
Functional completion and satisfaction under mobile signage guidance system.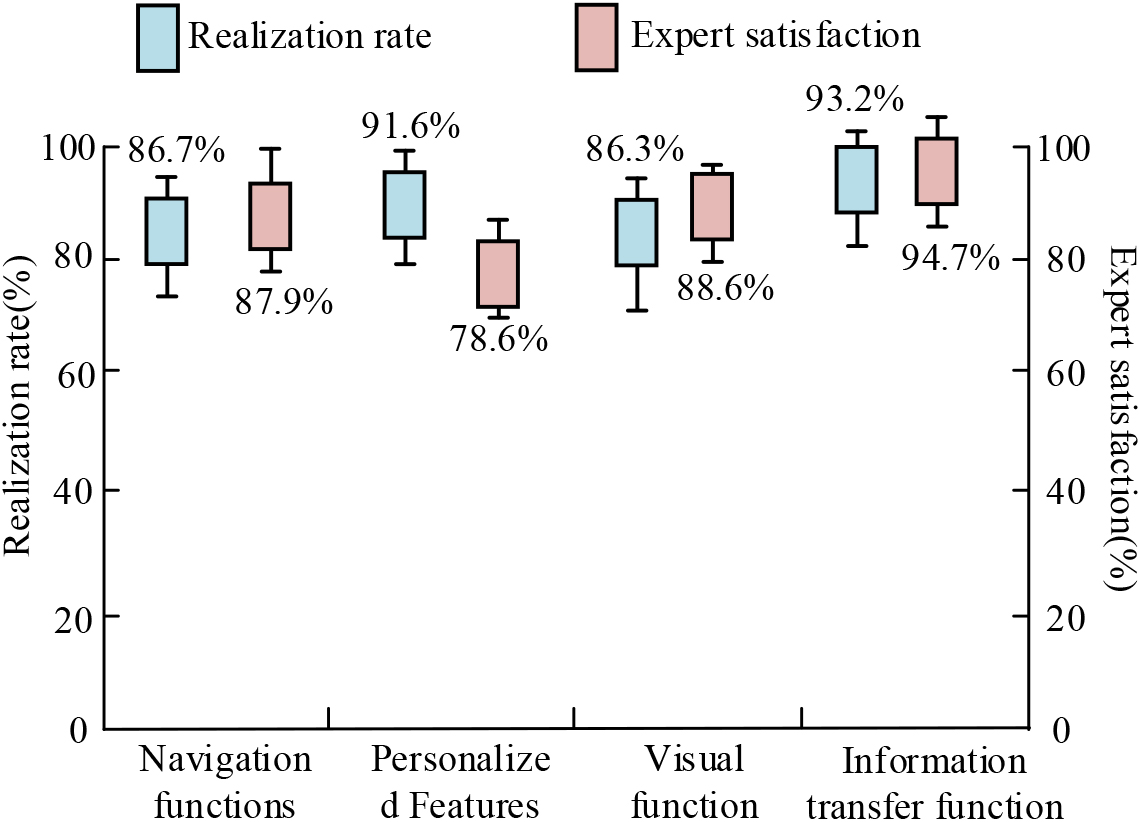
Figure 11 shows the function completion and satisfaction under the mobile signage guidance system. As can be seen from Fig. 11, the study evaluated four aspects of the system: guidance function, personalized service, visual function and information delivery function. The mobile scenic area signage guidance system constructed by the article using CNN-RNN and NetV2-SSD algorithms has a high degree of satisfaction and completion for visitors’ use. Among them, the highest degree of completion of the information delivery function was achieved, with 94.7% satisfaction of visitors. Although the personalized service has a high degree of completion, the customer satisfaction is low, which indicates that the personalized service function of this system is not completed to meet the needs of visitors, and the function needs to be improved. In summary, the comprehensive application of the mobile scenic area signage guidance system proposed in the article is better.
Conclusions
With the boost of tourism economy, many scenic spots have been transformed many times and their spatial layout has been relatively complex. Scenic area signage guidance system as a basic scenic area service projects for tourists to play the direction to provide some guidance. But the traditional signage guidance signs have been difficult to the current needs of tourists. For enhancing the quality of tourism services, this study uses CNN-RNN algorithm and SSD algorithm to design a mobile scenic area signage guidance system. CNN-RNN algorithm is mainly used for the image recognition function of the system, the algorithm through CNN and RNN two algorithms for the image feature extraction operation, and then use LSTM algorithm to recognize the features classification, and finally complete the image feature recognition. The SSD algorithm uses the NetV2 base network, and the algorithm completes the target localization through the image information recognized by CNN-RNN, and provides personalized services for tourists according to the localization. The experiment showcases show that the CNN-RNN algorithm for image recognition has an accuracy rate of 86.7% and can effectively avoid the disappearance of feature gradients. The NetV2-SSD algorithm can achieve 97.2% accuracy with a loss rate of 1.1%, which has good localization performance. Meanwhile, the AP and mAP values of NetV2-SSD algorithm are high, which indicates that the overall function of the algorithm is excellent. The proposed mobile guidance system is analyzed, and the information delivery function of the system can reach 94.7% satisfaction, which indicates that the application of the system is better. However, the personalized service satisfaction of this system is low, and this function can be optimized subsequently.
Footnotes
Funding
The research is supported by: Xi’an Social Science Foundation, Research on the Improvement of Management Level of Historical and Cultural Blocks in Xi’an under the Background of Urbanization (No. 22GL58).