
Abstract
A recent three-dimensional (3D) model that revisited earlier theoretical work for longitudinal electromagnetic stirring in the continuous casting of steel blooms is analyzed further to explore how the bloom width interacts with the pole pitch of the stirrer to affect the magnetic flux density. Whereas the first work indicated the presence of a boundary layer in the steel near the interface with the stirrer, with all three components of the magnetic flux density vector being coupled to each other, in the analysis presented here we find that the component along the direction of the travelling wave decouples from those in the other two directions and can even be determined analytically in the form of a series solution. Moreover, it is found that the remaining two components can be found via a two-dimensional computation, but that it is not possible in general to determine these components without taking into account the surrounding air. The validity of the asymptotically reduced model solution is confirmed by comparing it with the results of 3D numerical computations. Moreover, the asymptotic approach provides a way to compute the time-averaged Lorentz force components that requires two orders of magnitude less computational time than the fully 3D approach.
Introduction
Electromagnetic stirring (EMS) is the process by which a high level of stirring efficiency can be achieved through interaction between the magnetic field from a static induction coil and an electrically conducting metal bath. It has long been used in the steel industry as a way to affect the flow of molten metal during the continuous casting process, both in the ladle and during the solidification in the casting machine itself [1–3]; more recently, EMS has also been used in the magnesium and aluminium industries [4,5]. At the same time, mathematical modelling has been used for the purposes of understanding exactly what effect EMS has on the metal flow.
A series of papers by Schwerdtfeger and co-workers [6–11], originally written in the context of the continuous casting of steel, explored both experimentally and theoretically the effect of EMS in the round-billet, rectangular-bloom and slab configurations that are typical for this process; these have formed the basis of modelling in this area and are even cited until the present day [12–20]. The theoretical models developed consist of Maxwell’s equations for the induced magnetic flux density and the Navier Stokes equations for the velocity field of the molten metal; in principle, these equations are two-way coupled, since the alternating magnetic field gives rise to a Lorentz force which drives the velocity field, which can in turn affect the magnetic field. Typically, however, the magnetic Reynolds number is small enough that the velocity field does not affect the spatial and temporal distribution of the magnetic field, implying only one-way coupling. A further often-invoked simplification is that the frequency of the magnetic field is typically large enough to allow the use of the time-averaged value of the Lorentz force as input to the Navier Stokes equations, rather than having to solve for the velocity and magnetic fields simultaneously.
However, on revisiting the problem of rotary EMS in round-billet continuous casting, Vynnycky [21] recently found that the method used originally in [6,11] to determine the components of the Lorentz force did not lead to a unique solution; this was because the normal component of the induced magnetic flux density, rather than the tangential ones, had been prescribed as the boundary condition. Thereafter, Nick and Vynnycky [22] revisited the models for the corresponding problem for longitudinal stirring in rectangular blooms, originally considered in [7–10]; in addition to the issue of the appropriate boundary condition at the interface between the stirrer and the steel were the conditions to be taken at the interfaces between the steel and the surrounding air. Moreover, through nondimensionalization, it was found that the key dimensionless parameter in the model, Δ, was the product of the the wave vector and the width of the bloom, and that this parameter was comparatively large (approximately 13) in the models in [7–10]. Interestingly, previous literature had not remarked on the significance of this quantity and its cause is different to the more well-documented skin effect [23], which is related to the frequency of the magnetic field. Furthermore, it was possible to carry out an asymptotic analysis of the problem which identified the structure of the field; this essentially consisted of a boundary layer having a dimensionless width of order of 1∕Δ near the surface of the stirrer in which all magnetic flux density vector components decreased rapidly to zero. A follow-on question is then what happens when Δ is not large, as might occur if a smaller bloom and a larger pole pitch is used. Thus, the purpose of this manuscript is to consider, still in the low magnetic Reynolds number limit as in [22], the corresponding analysis when Δ is small; although this can no doubt be done solely numerically using commercially available software, the benefit of the analysis given here is that elucidates more clearly the dependencies of the magnetic flux density, the current density and the Lorentz force components on the applied boundary conditions and key dimensionless parameters. In addition, this gives a way to determine these quantities at a fraction of the computational cost that full 3D simulations require.
The structure of the paper is as follows. In Sections 2 and 3, we recap the mathematical formulation of the problem and the nondimensionalization of the governing equations, respectively. The new analysis, in terms of the asymptotically small parameter Δ, is given in Section 4, whilst Section 5 outlines the numerical method used to solve the fully three-dimensional (3D) and reduced two-dimensional (2D) time-dependent problems. The results are presented in Section 6, and conclusions are drawn in Section 7.
Model formulation
Governing equations
We consider, as depicted in Fig. 1, a linear travelling stirrer that is situated at y = 0, −h∕2 ≤ z ≤ h∕2, −l ≤ x ≤ 0, operating on a molten steel region whose cross-section is given by 0 ≤ y ≤ b, −h∕2 ≤ z ≤ h∕2, as shown in Fig. 2; the steel is surrounded by air on the other three sides. As explained in [22], this is a simplification of the actual situation in a continuous casting process, but we have nevertheless retained enough to carry out a meaningful analysis with respect to determining the characteristics of the magnetic flux density.
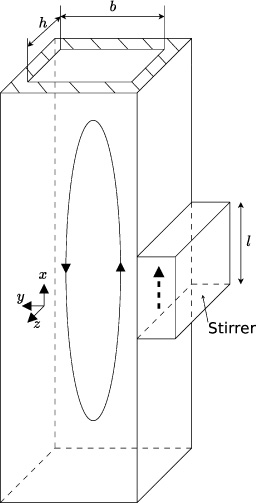
Schematic for the longitudinal stirring of blooms and billets. A travelling wave is passed along the casting (x) direction.
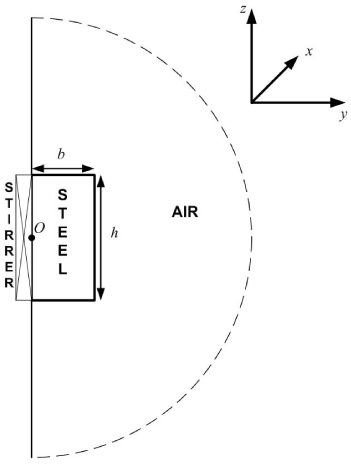
Cross-section in the y-z plane of Fig. 1, showing the stirrer, steel and air. O denotes the origin of the coordinates.
We consider the solution of Maxwell’s equations in the magnetohydrodynamic (MHD) approximation, which consist of:
the magnetic field constraint, Ampère’s law, Faraday’s law, Ohm’s law,
Manipulating (2)–(4), we obtain
Once B
x
, B
y
and B
z
have been computed, the quantities of principal interest are the components of the Lorentz force, F
x
, F
y
and F
z
, which are given by
At y = 0, as discussed previously [22], we prescribe the tangential components of
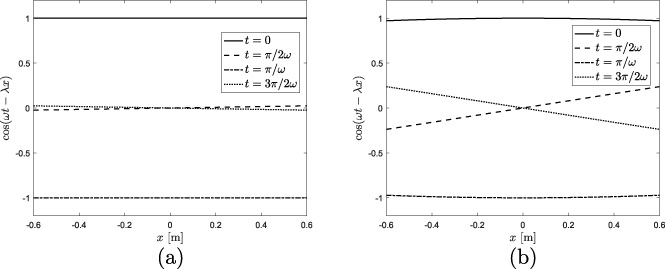
cos(ωt −𝜆x) vs. x for: (a) 𝜆 = 0.01∕b; (b) 𝜆 = 0.1∕b.
Model parameters
For the steel-air interfaces at y = b, |z| ≤ h∕2 and |z| = h∕2, 0 ≤ y ≤ b, we apply the conventional electromagnetic interface conditions between two media. These are the continuity of the tangential components of the magnetic field strength, the continuity of the normal component of the magnetic flux density and the continuity of the tangential components of the electric field; these are written, respectively, as
In the air far from the steel, we should also expect the magnetic flux density to vanish, so we take
We nondimensionalize the equations by setting
The boundary conditions (13)–(18) are then: at Y = 0,
As in [22], equation (20) and the boundary conditions in (27) imply that the solutions for B
X
, B
Y
and B
Z
will have the form
Our earlier work [22] considered the case Δ ≫ 1, and we identified a boundary layer of thickness 1∕Δ near the surface of the stirrer. This time, we consider the other extreme when Δ ≪ 1, whilst treating the parameters 𝛺 a and 𝛺 s as being of O (1). Note also that if we had had 𝛺 s ≫ 1, this would have led to the skin-effect case; however, 𝛺 s ≫ 1 still does not lead to the Δ ≫ 1 case considered in [22], since there is no term in 𝛺 s in (33). This further emphasizes the fact that the problem treated in [22] was not that of the classical skin-effect type.
We first determine the solutions for B X , B Y and B Z ; thereafter, these are used to constitute expressions for J X , J Y , J Z , F X , F Y and F Z .
In what follows, we assume that
We set
We can now see that, in contrast to the case when Δ ≫ 1, the equations for
Further simplification is now possible in view of the fact that σ
a
∕σ
s
≪ 1, 𝜂
a
∕𝜂
s
= 1, as seen from Table 1. Therefore, equations (61) and (66) reduce to
It is now possible to construct an analytical series solution for
As regards
For the boundary conditions, we have, in terms of
Using (85), we find that (89) and (92) give, at Y = 1, |Z| ≤ H∕2 and |Z| = H∕2, 0 ≤ Y ≤ 1,
Next, with the expansions
3D computations
In order to verify the correctness of the asymptotic analysis, equations (6)–(9), subject to (13)–(18), were also solved numerically. For this, the
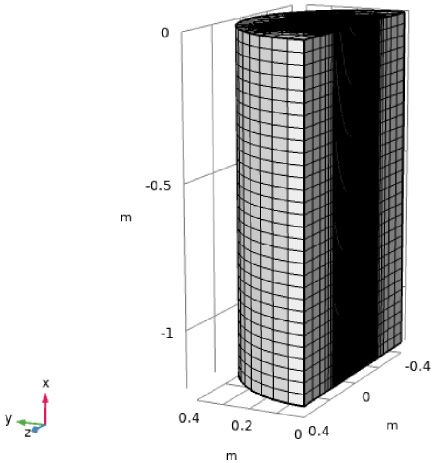
Geometry and mesh used for three-dimensional computations.
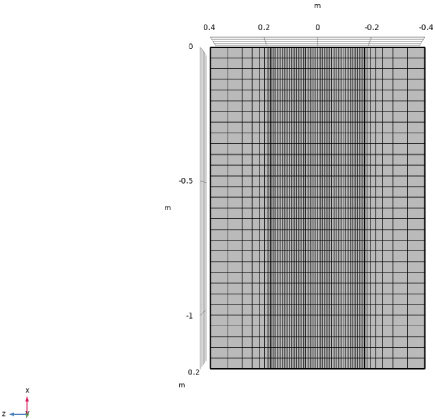
Mesh used for three-dimensional computations, adjacent to the stirrer face at y = 0.
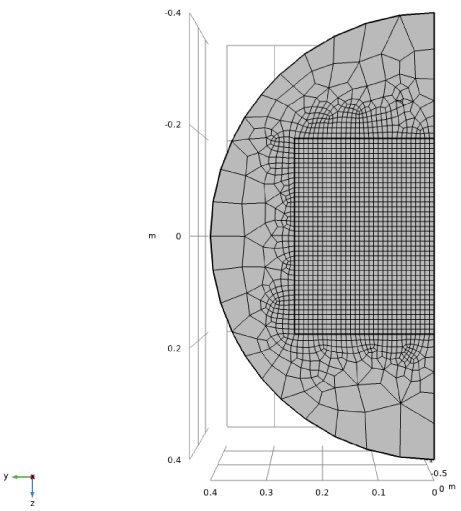
A cross-section in the y-z plane of the mesh used for three-dimensional computations.
Adaptive time-stepping was used for the numerical integration, and the convergence criterion at each time step was taken as
In order to ascertain the correctness of asymptotic reduction of the 3D model, it was also necessary to carry out 2D computations pertaining to the reduced form of Eqs (6)–(9), subject to (13)–(18). These are:
for B
x
, for B
y
and B
z
For Eqs (106)–(112), the
We focus on results for the following cases:
𝛼 = B
0, 𝛽 = B
0, which are the simplest profiles that provide non-trivial solution for B
x
, B
y
, B
z
; 𝛼 = B
0, 𝛽 = 0, which is the same as that considered in [22], and which was in turn motivated by the original model equations in [7]; 𝛼 = 0, 𝛽 = B
0, as this is, in some sense, the mirror image of case (ii).
However, the first step is to determine how small Δ needs to be in order for the asymptotic behaviour to become apparent in the full 3D computations. To this end, Fig. 7 compares the 3D numerical solution for B
x
for Δ = 10−3, 10−2, 10−1 and the asymptotic solution at z = 0 m, t = 0. 06 s, x = −0. 6 m when (𝛼, 𝛽) = (B
0, B
0) and (B
0,0); here, the asymptotic solution is the series expression from Eq. (79), for which A
n
is calculated from (76) and (77) as
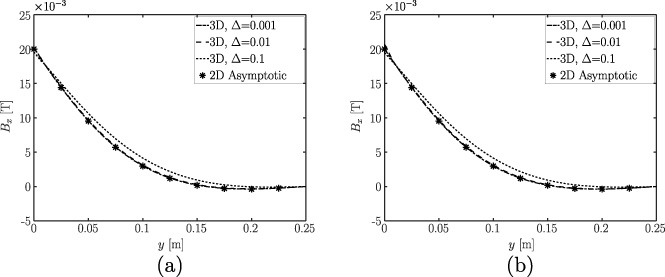
The x-component of magnetic flux density vector, B x , vs. distance from the stirrer, y, for z = 0 m, t = 0.06 s, x = −0.6 m, for Δ = 0.001, 0.01, 0.1, as obtained from full 3D computations and the asymptotic solution for: (a) 𝛼 = B 0, 𝛽 = 0; (b) 𝛼 = B 0, 𝛽 = B 0.
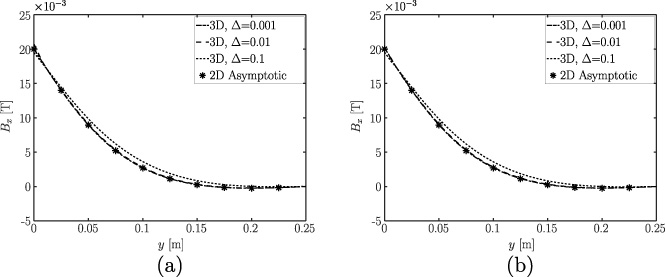
The x-component of magnetic flux density vector, B x , vs. distance from the stirrer, y, for z = 0.0875 m, t = 0.06 s, x = −0.6 m, for Δ = 0.001, 0.01, 0.1, as obtained from full 3D computations and the asymptotic solution for: (a) 𝛼 = B 0, 𝛽 = 0; (b) 𝛼 = B 0, 𝛽 = B 0.
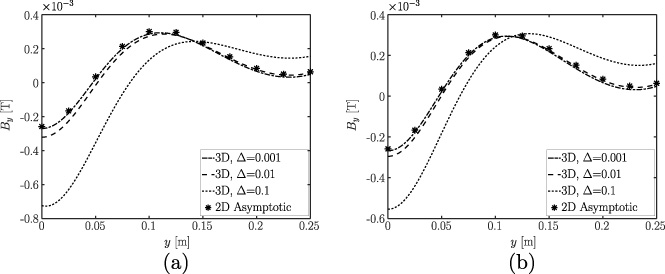
The y-component of magnetic flux density vector, B y , vs. distance from the stirrer, y, for z = 0.0875 m, t = 0.06 s, x = −0.6 m, for Δ = 0.001, 0.01, 0.1, as obtained from full 3D computations and the asymptotic solution for: (a) 𝛼 = 0, 𝛽 = B 0; (b) 𝛼 = B 0, 𝛽 = B 0.
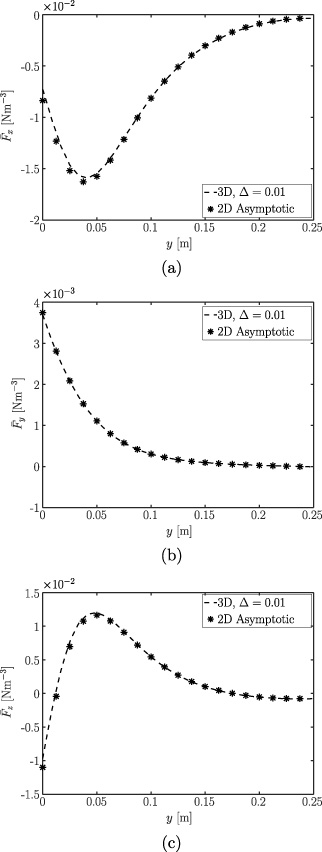
Comparison of the time-averaged component of the Lorentz force in the (a) x-direction,
Next, Fig. 9 shows corresponding plots for B y , this time when (𝛼, 𝛽) = (B 0, B 0) and (0, B 0); here, the asymptotic solution is the numerical 2D solution for B y and B z . Analogous to Fig. 7, the plots indicate that the choice of 𝛽 does not affect B y . Note that we could equally have presented plots for B z , but plots for B y are more instructive, since B y was not prescribed at y = 0; hence, plots for B y provide stronger evidence that the asymptotic limit has been reached. Observe also that this plot is for z = 0. 0875 m, rather than z = 0 m; this is because, as explained in Appendix C, B y is odd about z = 0 as Δ →0, meaning it will be zero there. Hence, to provide a comparison at a location at which B y is not zero, we chose the mid-plane between the axis of symmetry and the steel-air interface.
The quantities of principal interest are the time-averaged Lorentz force components, and it is therefore of interest to see whether the asymptotic approach is able to reproduce the 3D numerical approach, especially in view of the considerably smaller computational load in being able to do so. Thus, Figs 10(a)–(c) show
Lastly, we point out that, although we have not presented a comparison of these results with those of [7] here, such a comparison is discussed in Appendix C.
This paper has provided an extended analysis of a recent 3D model [22] that revisited earlier theoretical work for longitudinal electromagnetic stirring in the continuous casting for steel blooms [7], in order to explore how bloom width interacts with the pole pitch of the stirrer. The work in [22] indicated the presence of a boundary layer in the steel near the interface with the stirrer, with all three components of the magnetic flux density vector being coupled to each other. In the current work, it was found that the component along the direction of the travelling wave decouples from those in the other two directions, and can even be determined analytically in the form of a series solution, regardless of the form of the boundary condition at the stirrer; this decoupling is possible because the electrical conductivity of the steel is much greater than that of the surrounding air. On the other hand, the components in the remaining two directions remain coupled and need to be calculated numerically, albeit only with a 2D simulation. Moreover, the validity of the asymptotic structure of the solution obtained was confirmed via numerical computations carried out using the finite-element software Comsol Multiphysics. Overall, the significance of this result is that the numerical work associated with the asymptotic approach is around two order of magnitude smaller than that required when performing a numerical simulation of the originally posed 3D problem.
Lastly, it is worth considering how these results would be used to simulate a real caster with longitudinal stirring. In practice, such stirring, referred to as S-EMS (strand electromagnetic stirring), is applied several metres below the mould region where solidification of the steel shell begins. Thus, in the S-EMS zone, one can expect the presence of solid, mushy and molten regions, and the magnetic field will operate across all three. From the point of view of modelling, the governing partial differential equations consist of the Maxwell’s equations, the energy equation with conduction and convection, and the turbulent Navier–Stokes equations with Lorentz force and Darcy-like damping terms, the latter to take account of the transition to the porous mushy zone and then to the solid phase that translates with uniform speed in the casting direction; see, for example, [26]. However, it is normally found that the magnetic Reynolds number, Re m , which is given by Re m = Vlσ𝜂, where V is a characteristic velocity scale for the flow, is small enough for the velocity to be neglected from the Maxwell equations; thus, they decouple from the Navier–Stokes equations, meaning that the components of the Lorentz force can be determined a priori. Hence, the quantities determined in this paper can be used directly in subsequent computations of the Navier–Stokes equations and energy equation.
Footnotes
α ¯ ≠ 0,β ¯ = 0
For this case, we set
This system of equations decouples, so that
α ¯ = 0,β ¯ ≠ 0
For this case, we set
This system of equations decouples, so that
It is also of note that the new source terms that have appeared in the leading-order problems where either
Solution from Dubke et al. [ 7 ]
Nick and Vynnycky [22] showed that by replacing (13) with
Moreover, it was demonstrated in [22] that whilst the two expressions in (C.9) agreed with the results of 3D simulations, Eqs (C.2)–(C.6) did not. However, it was also remarked that the results in the original work [7] were presented for the situation for which Δ ≈13.1, i.e. Δ ≫ 1. It is therefore of interest to see to what extent the solution in [7] is valid for the Δ ≪1 regime that this paper has focused on.
First, we may ask whether (C.1) would once again be suitable in order that B
y
behaves at y = 0 in the same way as the solution in [7], i.e. B
y
= B
0 cos(ωt −𝜆x). However, we have seen already that, for Δ ≪ 1, the choice of B
x
at y = 0 will not affect B
y
at all; the only way to alter B
y
at y = 0 would be through the choice of B
z
at y = 0, which was not considered at all in [7]. If we now consider this possibility, we see that this also would not resolve the problem. In view of the geometry, it would be reasonable to take 𝛽 to be an even function of z; however, equations (106)–(112) would then permit a solution for which
Thus, overall, for the Δ ≪ 1 regime, the solution from [7] is even further removed from the actual solution than was the case for Δ ≫ 1.