
Abstract
In mobile ad hoc network (MANET), routing has been the main issue because its high mobility and maintaining its routing structures are important requirements. Geographical routing mostly relies on real time location information, however, there exist lags in correctness of location information, and malicious nodes can cause troubles in accurate location tracking in the network. In order to ensure the correctness of location update information, in this paper, we propose a novel design based on a cluster based geographic routing (CBGR) formulation (Muthusenthil and Murugavalli, 2014), wherein we add a position verification technique based on a direct symmetry test (DST) to securely verify the location claims. We further introduce a new noise threshold parameter in the CBGR formulation to evaluate the correctness of location information based on a DST. Then a location based encryption scheme is employed to protect the estimated location against the eavesdropping attacks. With our simulation results, we show that the proposed location verification technique for CBGR (LVT-CBGR) network enhances the network security and performs better compared to other protocols in terms of performance metrics. The experimental outcomes illustrate the fact that our approach is well-geared to scale down the overall network expenditure.
Keywords
Introduction
An ad hoc network consists of a set of wireless mobile nodes to form a network cooperatively without any specific configuration or administration. A mobile ad hoc network (MANET) is a particular variant of a wireless network where the mobile hosts are connected wirelessly and form an unfixed infrastructure based temporary network. By forming a multi-hop radio network, the MANET nodes communicate to each other. The mobile node operates as an intermediate router. A number of hops are utilized to carry the data packets sent by a source node to reach a destination node. Due to this property, multi-hops are common in data communication and the final quality highly depends on node cooperation (Lin and Labiod, 2006). MANETs have been applied to various application areas including emergency search, rescue locations, military battlefields, deployment in disaster areas, etc. Such application areas typically warrant rapid deployments with active re-configuration a necessity. These networks can also be deployed locally, that is in a confined local area, such as conference halls, sports stadiums, small aircrafts, taxicabs, boats etc. One of the main characteristics of an ad hoc network is usually a lack of resources such as limited bandwidth and/or battery power constraints. Hence, routing in a MANET setting is challenging and requires further research (Zou and Chigan, 2009).
Geographical Routing in MANETS
In geographical routing mobile nodes in a network are able to ascertain their positions thanks to certain positioning systems such as a GPS, and a source can utilize some kind of location service to obtain the corresponding destinations. Intermediate nodes achieve forwarding decisions of packets using the knowledge of the immediate neighbour positions, and the source appends the destination’s position in the packet header. In a default setting, the data packets are forwarded greedily through to the neighbour nodes thereby allowing the greatest geographical progression toward the destination. However, whenever such a neighbour does not exist, forward is used to recover the local gap perimeter. In this case, the packets travel across the planar local topology subgraph of the network by using the right-hand rule and progress until greedy forwarding can be restarted again. Although better than a global topology-based routing, imprecise knowledge of a local geographical topology, as well as destination positions, reduces the geographical routing performance. In current geographical routing protocols, each mobile node of the network periodically broadcasts a positional beacon to achieve a local geographical topology. However, in high dynamical scenarios, such proactive protocols create a lot of control overhead information even when there is no traffic through the system, as well as outdated results of the topology. Furthermore, reliance on one-hop forwarding of topological information in these geographical routing protocols leads to sub-optimal forwarding and blind forwarding in current systems (Xiang et al., 2007). In general, geographical routing utilizes node locations to identify viable paths to the nodes. Furthermore, nodes not only know their own locations but also their one-hop neighbours. Since the system follows geographical routing, the destinations are explicitly described geographically (a region or a location), with each packet holding a small amount (O, 1) of routing information in the systems (Rathidevi and Kumaran, 2015).
Location Verification Technique
Malicious nodes can affect the forwarding decisions and a location verification technique (LVT) is utilized to check the accuracy of given node positions collected in the neighbour information table. This technique avoids possible errors in node positions in MANET and it is paramount to verify the node positions in the neighbour before choosing the nodes for forwarding packets in the network. Accuracies of the locations can be assured by position verification technique that utilizes the positioning systems. This technique finds the appropriate neighbours for forwarding the packets. A major bottleneck is the precision of such selected neighbour nodes and the identification of the proper ones. This is crucial in avoiding malicious node selection by hackers when selecting non-neighbours as true neighbours. Neighbourhood discovery process, also called the verification, ensures that the selected node is indeed in the right neighbourhood. Thus, after identifying the reliable and dependable nodes, verification technique is performed since the selected nodes are considered for validating other nodes (Papadimitratos et al., 2008; Basha and Joshna, 2014). Position verification can still result in false positive and false negative rates since there are different types of attacks that can happen in the network. Due to limited message reception in typical wireless network settings, it is in general not always feasible to validate neighbourhood nodes with the neighbourhood discovery approach. Malicious hackers can manipulate the network nodes to disrupt communication between different nodes. Also, this can lead to the precise determination of true neighbourhood nodes surrounding the source node (Papadimitratos et al., 2008). These misleading nodes, incorrectly identified as true neighbourhood nodes, lead to false position details at similar ranges (Basha and Joshna, 2014).
Previous Work and Proposed Solution
In prior research (Muthusenthil and Murugavalli, 2014), a protocol based on location supported cluster based geographical routing (CBGR) is proposed for intermittently connected MANET. In the previous CBGR protocol, degree difference based node value, node mobility, and residual energy are used to choose the head of the cluster. In this setup, there is a node with global positioning system (GPS) and a node with antenna. Moreover, the cluster consists of at least one G-node that selects the cluster head based on the information of remaining energy, speed and mobility of the nodes. In the ad hoc networks, due to the mobility of nodes the cluster maintenance is used to dynamically reorganize and reconfigure the overall cluster, and a store-carry forward model along with the geographical routing protocol is utilized. At the end, a location verification update technique is used to prevent location errors due to routing. By extending the work in Muthusenthil and Murugavalli (2014) and the CBGR protocol, our goal here is to design a position verification technique for the cluster based geographical routing in order to ensure the correctness of location update information. We therefore propose a location verification technique for cluster based geographical routing (LVT-CBGR) with the following features: It is modelled for hierarchical geographical ad hoc networks and without relying on the trusted infrastructure. It allows all nodes to perform all verification process autonomously. It is executed by any node at any point of time (i.e. reactive). It is independent, lightweight and robust as it generates low overhead traffic.
We organize the rest of the work as follows. In Section 2 previous location verification for geographical routing methods are presented. Section 3 shows position verification technique for the cluster based geographical routing in order to ensure the correctness of location update information. Finally, Section 4 discusses the experimental simulations of the proposed approach, and Section 5 provides the conclusions of our work.
We briefly review related ad hoc network modelling and location verification approaches that are relevant to the work presented here. Liu et al. (2010) studied a node-to-node location verification method, wherein they make use of pairs of neighbourhood nodes for detection and target in the network, and determine the target and position of every pair by using one detect node and two globally active detective nodes. For location determination the distance is calculated based on these nodes. The location claim validation that lets the detecting node to clarify the location declaration of TN is supported by recognizing the compromised TN with the false location declaration and safeguarding the benign TN from overhearing when transmitting messages with the help of a new location based encryption technique and by not needing any kind of pre-shared secret keys.
Lo et al. (2013) have presented a geographical forwarding scheme for VANETs with location verification to determine the forwarding node in order to identify a proficient and steady node, in this case, a vehicle, so it can be used as a forwarding node in the network. After that, the calculation of link time, as well as the signal to noise ratio of the given signal, are used to affirm the chosen node is not only steady but also able to maintain longer persistent link time with the information providing nodes. To verify the location accuracy of surrounding nodes collected in the lookup table, a general verification technique is employed. Thanks to this location verifying technique, false nodes are found and can be removed immediately, and the vehicles that positively clear the verification test are selected as the successor forward node.
Fiore et al. (2013) proposed to identify and verify neighbourhood node positions in a MANET setting by using a special verifier node that determines and validates the positional information. In this approach, the special verifier aggregates the details of one-hop neighbourhood nodes and computes neighbourhood distances between nodes. Nodes then communicate with ascertained neighbourhood nodes using broadcast of POLL and REPLY messages. It then records the overall communication time between two nodes. To execute the time of flight based ranging, the verifier node broadcasts a REVEAL message and the neighbourhood nodes propagate the REPORT message to the verifier node which consists of identity and timing information. This helps in estimating the neighbourhood nodes and verifier distances between them. With these results obtained, each node is categorized into faulty, unverifiable, verifiable if sufficient node details are not available.
Shen and Zhao (2013) studied a new protocol for MANETs using an anonymous location based efficient routing terms, abbreviated as ALERT. In their approach, the network is split into zones using the protocol with a sender or a forwarder node. GPSR algorithm is utilized in these zones to move data toward the forwarder nodes for developing a reliable and smart path for intermediate relay nodes. In the next step, message propagation reaches the destination zone nodes without identification details. In this model, the source is kept anonymous and without details for security purposes of not revealing the source and destinations. In a similar approach, to handle privacy, El Defrawy and Tsudik (2011) proposed a system called privacy-friendly routing in suspicious MANETs (PRISM). It works based on the global group signature approach, and a tracking resistant method is utilized for location based on forwarding across the network. The source node broadcasts a RREQ message that has the group signature and a time stamp. This further contains an encrypted version of a session key. The destination node then examines the validity of time stamp from the source node, and if it is valid, it provides the response RREP upon receiving RREQ. This again is further encrypted with the session key as before. If it is not valid, then the RREQ is discarded. Upon obtaining the RREP message, the source node decrypts it with the session key. Note that here the destination node provides the location information, as well as validates the signature that is being sent. Finally, in the scenario where RREP is cached and executed priorly, the source node drops RREP message altogether.
Adnan et al. (2017) have presented a bound collection window for a sufficient collection time and verification cost for both attacker identification and isolation. Sheet et al. (2017) proposes two layered location information verification cum security technique based on transferable belief model. Rajakumar et al. (2017) proposed a method to search out the geographical position of unknown nodes with the help of anchor nodes in WSN using grey wolf optimization. Malandrino et al. (2014) suggested server based approach A-VIP for location verification uses a trusted server to verify location claims which reduces the applicability due to increasing demand of distributed approach. Various location verification schemes have been discussed in detail.
System Model
We describe our system model here and provide the details of our LVT based CBGR formulation along with metrics used to evaluate the overall system. We assume the evenly distributed nodes in the network with the network size of
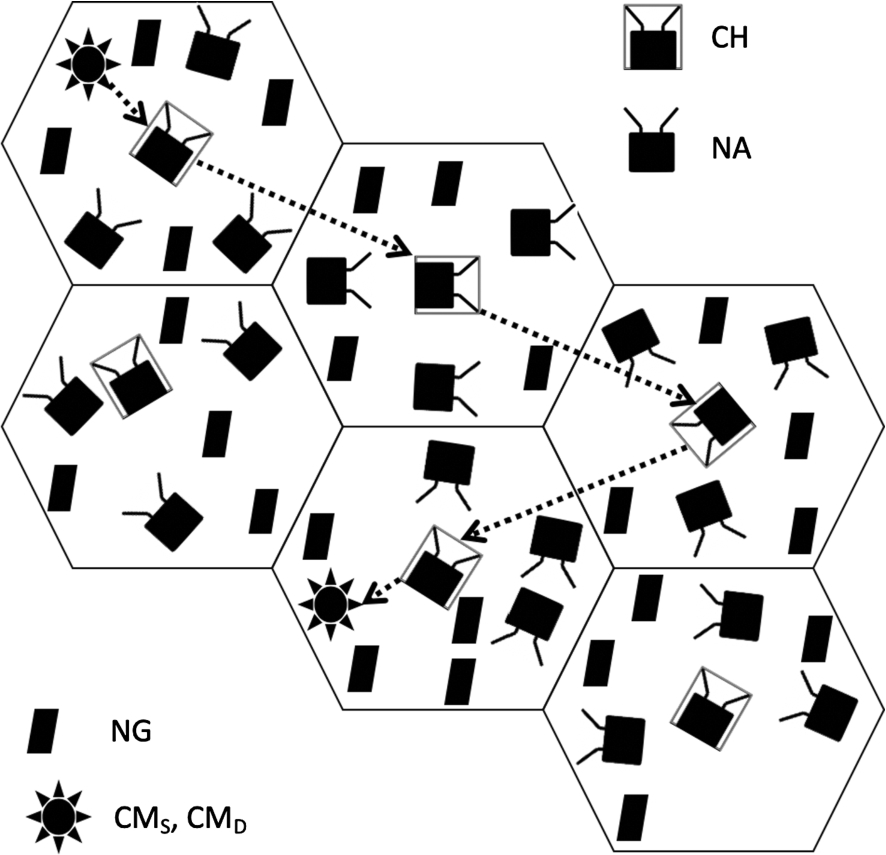
Architecture setup of the proposed model.
In the network studied here we consider all the other nodes as communication nodes that can be reached directly from a node under consideration. In order to achieve this, we have made the following assumptions in this work:
Each node knows its own position thanks to GPS receivers and shares ir with other nodes with maximum tolerance and ranging error.
Node positions do not vary during message exchange which takes place in less than few ms.
Each node carries unique identity authenticated by location based encryption scheme.
In this work, we study a design with location verification technique for the cluster based geographical routing (LVT-CBGR) in MANET. In this technique, a direct symmetry test (DST) is used to securely verify the location claims. Then a location based encryption scheme is employed to protect the estimated location against the eavesdropping attacks. Note that our network architecture consists of the cluster head ( This is the coordinating node in each of the clusters. Here, we make an assumption that only These nodes represent members of the network and perform some processing, gathering information and communicating with the cluster head in the network. Any If If
Summary of notations and their representations used in this work.
Summary of notations and their representations used in this work.
The degree difference metric
This metric node mobility is based on the coordinates of the nodes, and is given by
The residual energy is computed based on the initial energy of a node
Let
The cumulative distribution
Next, we recall the main steps in a general clustering approach in the following steps:
Initially at the deployment of nodes in the network, a broadcast message of Hello is sent to its neighbours with the specific format of the message. Note that the Hello message consists of the following five parameters, namely node ID, node location (obtained using GPS), node degree difference (1), node mobility (2), and the residual energy (4).
The neighbours list (NL) is maintained by each using the original Hello message along with their self node ID. Each node now estimates a node factor using the above parameter values and unitary weight values
After estimating the node factor, each node then forwards to its one-hop neighbours

The highest value
As a final step, after receiving the sent message
We next describe the possible attacks on location based routing protocol considered in this work. Our experimental simulation results in Section 4.2 provide the testing of results for the attacks described here. Generally, the attackers can be broadly classified as malicious and compromised nodes. A malicious node is not involved in accessing the message content. A compromised node behaves maliciously and can access the message content as it is trusted by other nodes in the network. A compromised node can launch several attacks effectively without being detected even by the strong cryptographic techniques. Both the malicious and compromised nodes can launch various attacks against the location aided routing protocols. Some of the common attacks are discussed in this section. Figure 2 demonstrates the attacks on sensor nodes.
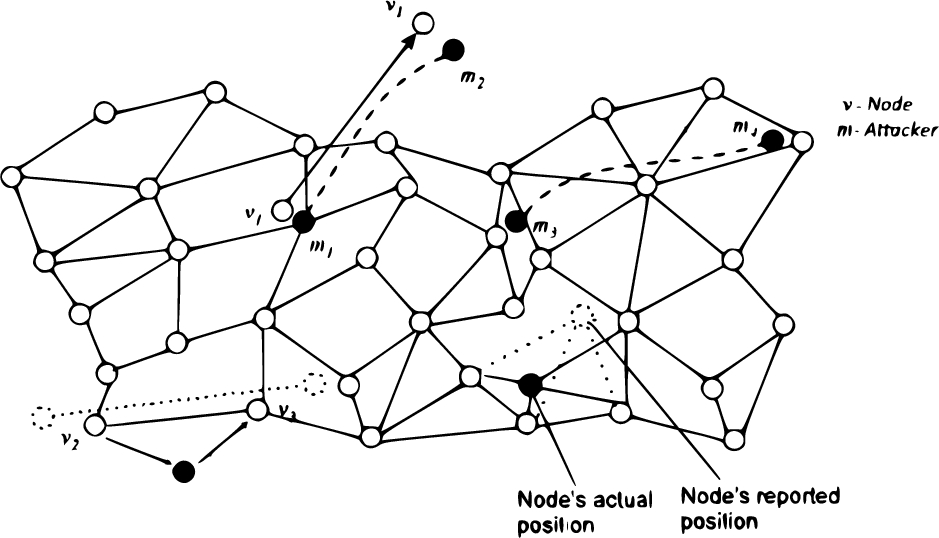
Possible attacks on sensor nodes in a MANET. Here we show attacks that can tamper the location information of true nodes thereby altering the actual position of a node.
In this attack, the attackers are capable of modifying the content in location information packets. This attack includes impersonating other nodes and replaying packets with modified contents.
The adversaries intentionally announce a fake position to gain the network access and can create the network traffic in high level.
In this attack, the adversaries intentionally drop some or all packets containing location information that are forwarded through it. It is known that MANET nodes act both as end hosts and routers. In this case, packet dropping attackers can destroy the entire functionality of the network with an increased number of attackers.
In this attack, the content stored in the location information table is modified by the attacker. This type of attack can include the deletion, modification, and falsification of contents that are provided in the location information table in a node-wise manner.
An attacker can initiate the neighbour position verification protocol several times over a short interval, and get the same challenge and reply message repeatedly from other nodes to congest or clog the communication medium. This adversarial action causes severe damage as the challenge messages are larger in size.
The adversaries can spoof the packets that contain the location information.
The jamming adversaries block radio transmissions in a specified geographical region. Hence, the functioning of geographical routing protocol has to be prevented from using that area.
In order to verify the location claims in the MANET, here we propose to use the direct symmetry test (DST) to securely verify the location claims of cluster members
It not only verifies the distances
It further checks for the consistency of the advertised neighbourhood node location information within a prescribed error margin level.
Finally, a sanity check whether
We utilize the DST to securely verify the location claims of the user and a similar usage was done by Fiore et al. (2013). Let
It verifies the direct links with its neighbours within the transmission range, i.e. if
It verifies whether, within an error margin, the position established by the neighbour is consistent with the obtained distances, i.e.
It verifies whether
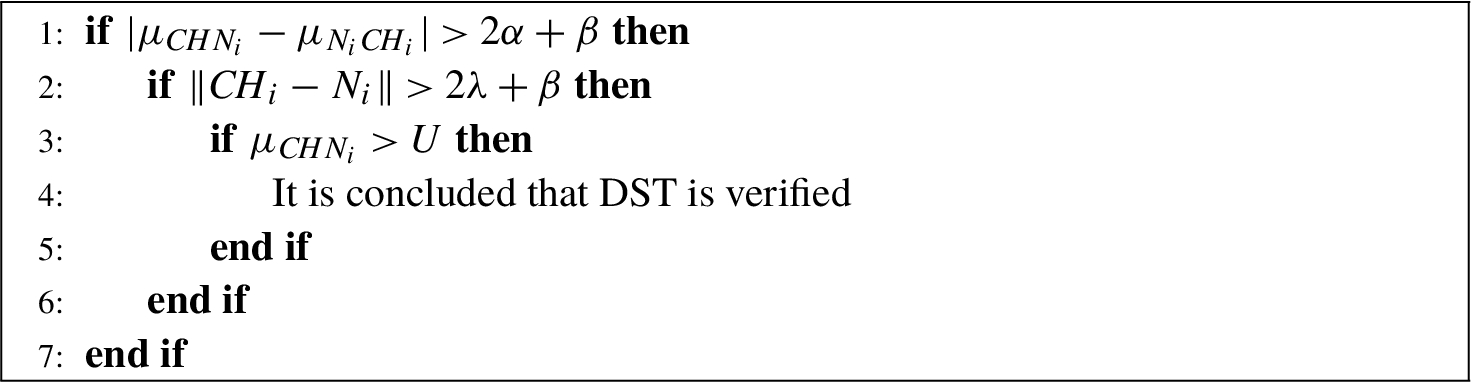
Note that U refers to the maximum nominal transmission range, and it is greater than the distance at which two nodes can communicate. If there is a mismatch in the above three verification rules, then the neighbour node is marked as defective.
Once the location of the node is estimated, it is required to protect the location claim from eavesdropping and verify the consistency between the location Q and location claims
For

The noise threshold
Once We illustrate this scheme with the following example. Consider the following scenario: Here, Q and If Hence, a local search is performed around In particular, If Then However, if
Experimental Setup and Performance Metrics
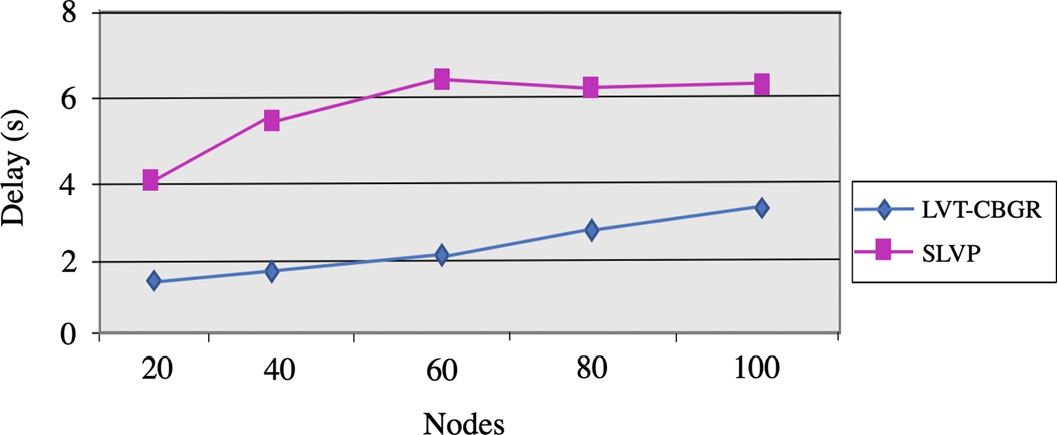
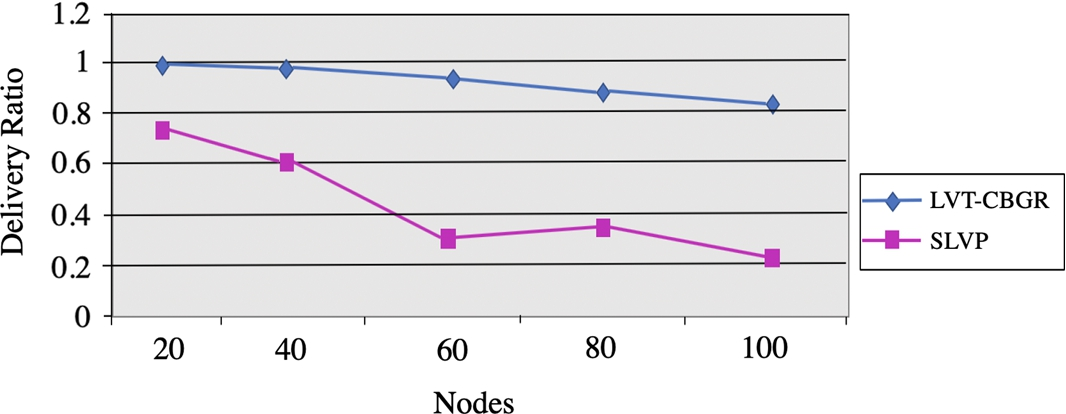
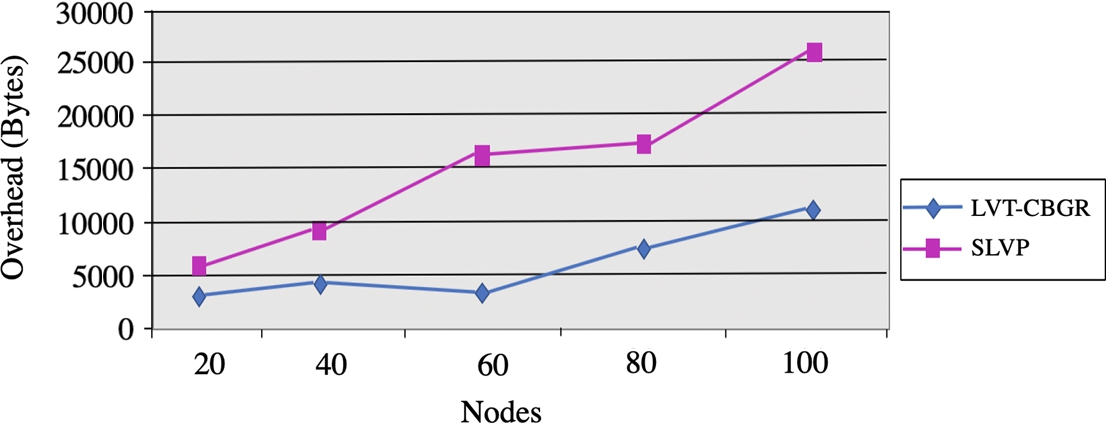
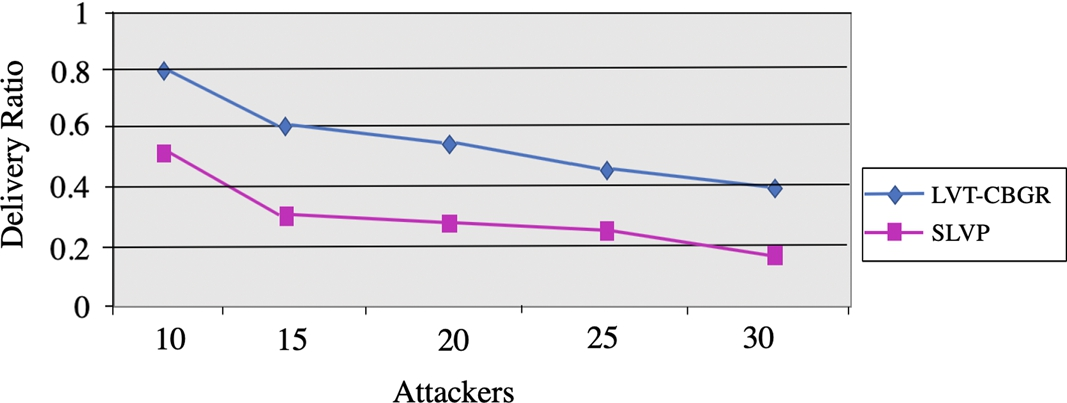
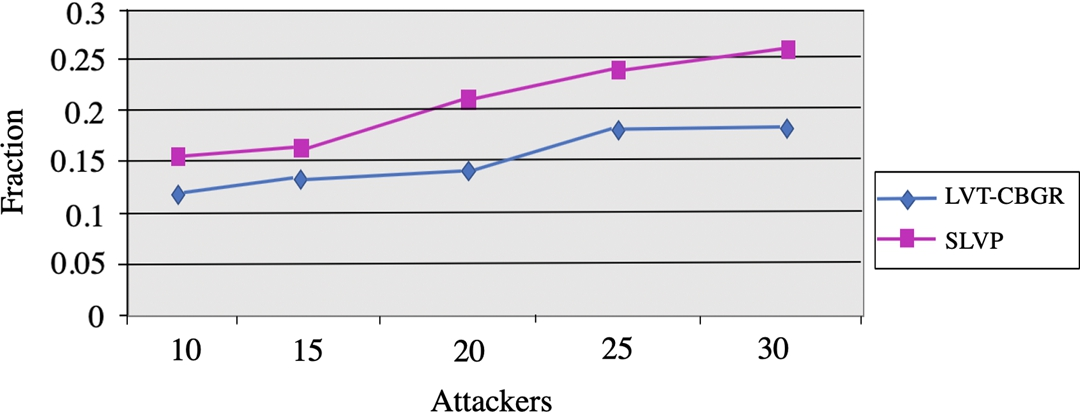
We used the network simulator NS-2 (Fall and Varadhan, 2007) to test the performance of our proposed location verification technique for cluster based geographical routing (LVT-CBGR) and to perform comparisons. Table 2 summarizes the simulation parameters used. Our simulation environment consists of the following key components: Routing, namely geographical routing (Muthusenthil and Murugavalli, 2017) ; Node mobility and data traffic; Attacker model; DST based verification system. Simulation parameters used in network simulator NS-2 for testing the performance of our proposed location verification technique for cluster based geographical routing (LVT-CBGR). For our study, we utilized a greedy routing. This approach chooses the neighbour nearest to the destination as next hop for packets. In case of failure due to the unavailability of next hop, right hand thumb govern is applied, i.e. packets are put away locally until either an appropriate neighbour is reachable or until the packet drops due to overflow. The simulation mainly considered two parameters: data traffic and node mobility. As data traffic, 100 messages are transmitted from a Attacker nodes are implemented based on these models. • Whenever an attacker node uses random position field in its group and sends a beacon message to announce its present position instead of its actual position. • Whenever a malicious node gets a data packet, falsifying the position of its own and rerouting packets, sometimes even being dropped to disconnect routes. This based on the DST for all the nodes in the network. The end-to-end-delay is averaged over all surviving data packets from sources to the destinations. It is the ratio of the number of packets received successfully and the total number of packets transmitted. It is the number of packets dropped during the data transmission. It is the adversary nodes during one-hop transmission in packet forwarding. It is the number of packets successfully delivered from source to destination per second with attacker’s false location claims. We next report the performance of the above metrics based on our simulation results with respect to varying the number of nodes as well as the number of attackers. We varied the total number nodes in the network from 20 to 100. Node vs Delay (s). Comparison of our LVT-CBGR and SLVP performance in terms of end-to-end delay as the number of nodes increases indicating that the proposed network obtains lowest delay (s). Figure 4 illustrates the packet delivery ratio when there is an increase in the number of nodes. It is clear that our LVT-CBGR technique ushers in superior delivery ratio as against the SLVP approach. At the outset, when the rate is 20, the packet delivery ratio is Node vs Packet Delivery Ratio. Comparison of our LVT-CBGR and SLVP performance in terms of packet delivery ratio as the number of nodes increases shows that our proposed network obtains higher delivery ratios. Figure 5 effectively displays the packet drop ratio for the LVT-CBGR and the SLVP approach. In the case of the proposed technique, the packet drop is smaller than that of the modern approach by around a high Node vs Packet Drop Ratio. Comparison of our LVT-CBGR and SLVP performance in terms of packet drop ratio (bytes) as the number of nodes increases. Our LVT-CBGR obtains a smaller packet drop even when the nodes increase to 100. we varied the total number of attackers from 10 to 30. Figure 6 illustrates the performance evaluation and comparison of the approach and the SLVP method with respect to the packet delivery ratio. As the number of attackers goes up, the packet delivery ratio is reduced, which shows that the attackers are capable of adversely affecting the efficiency in performance of the method. Still, the packet delivery ratio of the novel approach is larger than the modern approach. It is established that the resilience of our LVT-CBGR method is around 34% greater than the SLVP approach. Attackers vs Packet Delivery Ratio. Comparison of our LVT-CBGR and SLVP performance in terms of packet delivery ratio as the number of attackers increases shows that our approach is more resilient to attacks. Figure 7 shows the performance evaluation and comparison of the approach and SLVP method with respect to compromised communication. As the number of attackers goes up, the compromised communication is increased, which shows that the attackers are capable of adversely affecting the efficiency in performance of the method. Still, the compromised communication of the approach is smaller than the SLVP approach. On analysis, it is established that the resilience of our LVT-CBGR method is around Attackers vs Compromised Communication. Comparison of our LVT-CBGR and SLVP performance in terms of communication fraction compromised as the number of attachers increases. Our LVT-CBGR compromises less communication as the number of attackers increase to 30. In this paper, we have proposed to design a location verification technique for the cluster based geographical routing (LVT-CBGR) in mobile ad hoc networks (MANETs). In this technique, a direct symmetry test (DST) is used to securely verify the location claims. Then a location based encryption schema is employed to protect the estimated location against the eavesdropping attacks. By introducing a new noise threshold parameter in the CBGR formulation, the consistency between the location and location claims are verified effectively. With experimental simulations, we obtained good results with varying number of nodes, in particular our results on increasing the nodes against delay(s) showed that the LVT-CBGR obtained low delay times. Moreover, when compared to a related approach, the LVT-CBGR obtained increased packet delivery ratios of The authors sincerely thank the reviewers for their comments that helped revise our manuscript and improve the overall content and presentation of the work.
Footnotes
Acknowledgements
References